Изобретение относится к области электротехники и может быть использовано в системах управления преобразователями частоты.
Известны способы преобразования постоянного напряжения в квазисинусоидальное с широтно-импульсной модуляцией (ШИМ), в основе которых лежит принцип наложения синусоидального сигнала задания на пилообразный сигнал несущей частоты ШИМ, реализованные по принципу двуполярной широтно-импульсной модуляции (Н02М 7/527, Н02Р 5/175, RU 2012989 C1, 20.06.2004). Указанный способ имеет недостаток - большое искажение напряжения по сравнению с инверторами с однополярной широтно-импульсной модуляцией (ОШИМ).
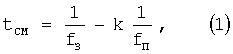
Наиболее близким, взятым за прототип, является способ управления преобразователем напряжения с ОШИМ (Н02М 7/527, RU 2071634 C1, 01.10.1997 и фиг.1). Квазисинусоидальное напряжение формируется путем однополярной широтно-импульсной модуляции, при сравнении пилообразного сигнала несущей частоты с синусоидальным сигналом задания, с инвертированной отрицательной полуволной, что отображено на фиг.1, где
U - напряжение;
t - время;
UЗ - сигнал задания;
UП.О - опорный пилообразный сигнал;
F - коммутационная функция управления силовыми ключами.
Данный способ преобразования постоянного напряжения в квазисинусоидальное с широтно-импульсной модуляцией реализуется путем сравнения по модулю задающего синусоидального сигнала с опорным пилообразным сигналом, по результату сравнения формируется сигнал управления силовыми ключами.
Недостатком данного способа является ухудшение качества работы электропривода в установившемся режиме и переходных режимах за счет появления, при определенных соотношениях частоты пилообразного сигнала и частоты сигнала задания, постоянных составляющих в выходном напряжении автономного инвертора напряжения (АИН), ухудшающих работу электроприводов в установившемся режиме и в переходных процессах за счет возникновения постоянных составляющих в токах фаз (до 20% от номинала) и, как следствие, дополнительных пульсаций вращающегося момента.
Постоянные составляющие появляются в том случае, если в периоде управляющего напряжения (TЗ) на входе АИН укладывается целое (четное или нечетное в зависимости от способа организации ШИМ) число периодов опорного пилообразного напряжения (ТП), вольт-секундная площадь работы верхних и нижних силовых ключей (см. фиг.1) неодинакова. Если же в периоде управляющего напряжения укладывается дробное число периодов пилообразного напряжения, то возможно появление биений (постоянная составляющая изменяется по уровню и знаку с некоторой частотой, зависящей от соотношения частот управляющего и пилообразного напряжений), среднее значение постоянной составляющей при этом равно нулю. Критические (субгармонические) частоты (fКР), на которых возникают наибольшие постоянные составляющие, можно определить как
 ,
,
где  - целые числа;
- целые числа;
fП - частота пилы широтно-импульсной модуляции.
Чем меньше n, тем больше постоянные составляющие.
Технический результат предлагаемого способа - повышение качества работы электропривода в установившемся режиме и переходных режимах за счет исключения постоянных составляющих в выходном напряжении автономного инвертора на субгармонических частотах, что позволит исключить постоянные составляющие в токах фаз и вызванные ими колебания вращающего момента.
Технический результат достигается тремя вариантами способа.
По первому варианту способ осуществляется следующим образом: преобразование постоянного напряжения в квазисинусоидальное реализуется путем сравнения положительной полуволны задающего (синусоидального) сигнала с опорным пилообразным сигналом, а инвертированной отрицательной полуволны с дополнительным пилообразным сигналом, формируемым относительно опорного пилообразного сигнала путем смещения его по времени на величину, вычисляемую в каждый цикл задающего сигнала.
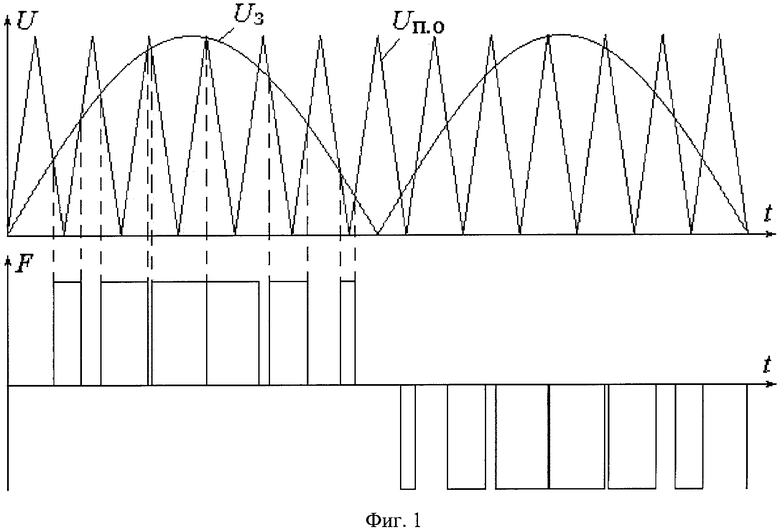
Структурная схема АИН по предложенному способу показана на фиг.2. Временные диаграммы, поясняющие предложенный способ, представлены на фиг.3, где приняты следующие обозначения:
1 - блок вычисления смещения;
2 - блок формирования пилы со смещением;
3, 4 - сумматор;
5, 6 - нуль-орган;
7 - блок силовой части АИН;
fЗ - частота задающего сигнала;
UП.СМ - пилообразный сигнал со смещением;
F1, F2 - коммутационная функция управления силовыми ключами верхнего и нижнего плеча АИН соответственно;
UАИН - выходное напряжение АИН.
Время, на которое сигнал UП.СМ смещается относительно UП.О, определяют по следующей формуле:
где k - целая часть отношения fП/fЗ.
Приведенный на фиг.2 АИН работает следующим образом.
Сигналы fП и fЗ поступают на блок вычисления смещения 1, реализуемый по формуле (1), выходом которого является величина временного смещения tСМ, поступающего вместе с опорным пилообразным сигналом UП.О на блок формирования пилы со смещением 2, представляющий собой набор логических и математических операций, осуществляющих смещение раз в период задающего сигнала, опорного пилообразного сигнала путем временной задержки на величину tCM. На выходе блока 2 формируется пилообразный сигнал со смещением UП.CM. Далее синусоидальный сигнал задания UЗ вычитается в сумматоре 3 из опорного пилообразного сигнала и складывается в сумматоре 4 со смещенным пилообразным сигналом. Результирующие сигналы с сумматоров 3 и 4 поступают на два независимых нуль-органа 5 и 6 соответственно, выходом которых являются коммутационные функции F1 и F2 для управления верхними и нижними ключами соответственно, находящимися в блоке силовой части АИН 7, выходом которого является квазисинусоидальное напряжение требуемой частоты UАИН.
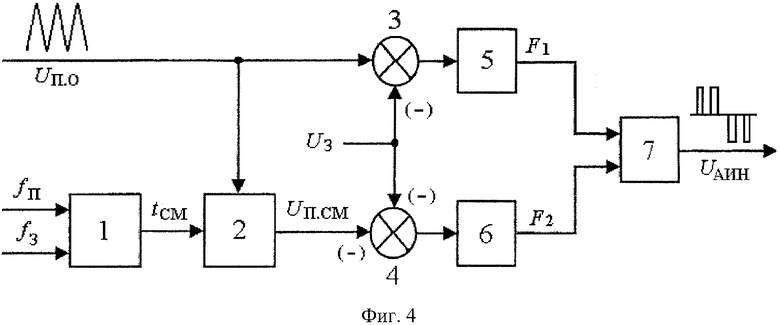
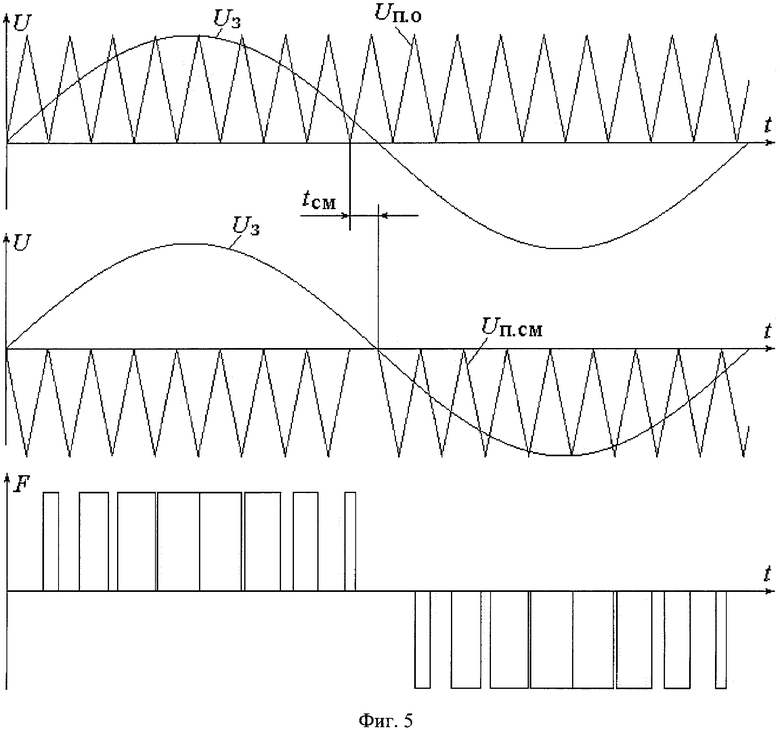
По второму варианту способ осуществляется следующим образом: преобразование постоянного напряжения в квазисинусоидальное реализуется путем сравнения положительной полуволны задающего (синусоидального) сигнала с опорным пилообразным сигналом, а отрицательной полуволны с дополнительным пилообразным сигналом, формируемым относительно опорного пилообразного сигнала путем смещения его по времени на величину, вычисляемую в каждый цикл задающего сигнала, с последующим его инвертированием.
Структурная схема АИН по предложенному способу аналогична первому варианту и показана на фиг.4. Временные диаграммы, поясняющие предложенный способ, представлены на фиг.5.
Работа способа по предложенному варианту отличается от работы по первому варианту тем, что на сумматор (4) синусоидальный сигнал задания UЗ и сигнал смещенного пилообразного сигнала UП.СМ поступают с противоположным знаком.
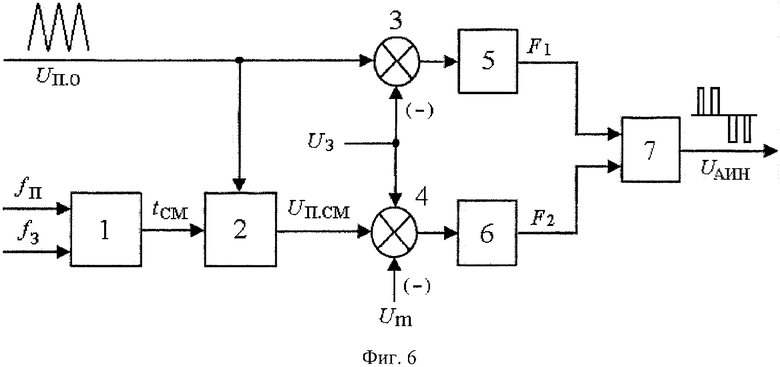
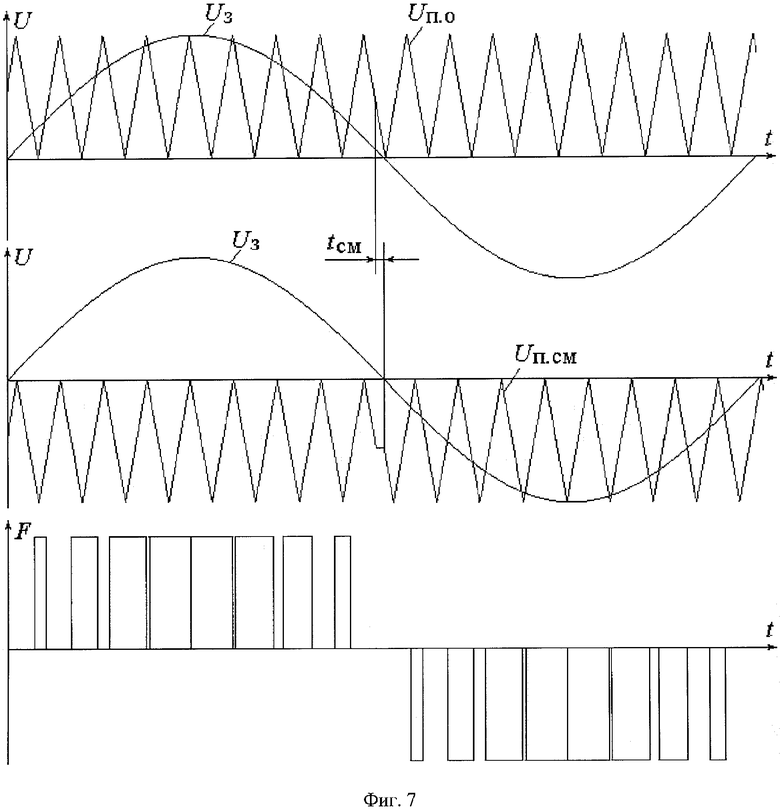
По третьему варианту способ осуществляется следующим образом: преобразование постоянного напряжения в квазисинусоидальное реализуется путем сравнения положительной полуволны задающего (синусоидального) сигнала с опорным пилообразным сигналом, а отрицательной полуволны с дополнительным пилообразным сигналом, формируемым относительно опорного пилообразного сигнала путем смещения его по времени на величину, вычисляемую в каждый цикл задающего сигнала, с последующим смещением его по уровню в отрицательную сторону на амплитудное значение пилы.
Структурная схема АИН по предложенному способу аналогична первому варианту и показана на фиг.6. Временные диаграммы, поясняющие предложенный способ, представлены на фиг.7, где: Um - амплитудное напряжение пилы.
Работа способа по предложенному варианту отличается от работы по первому варианту тем, что в сумматор (4) добавлен сигнал амплитудного напряжения пилы Um, вычитающийся из суммы синусоидального сигнала задания UЗ и смещенного пилообразного сигнала UП.СМ.
Сигнал пилообразного напряжения со смещением относительно опорного пилообразного сигнала должен формироваться независимо для каждой фазы. Вычисление нового значения tсм должно происходить в то время, пока сигнал задания находится положительной фазе. Необходимое смещение сигнала UП.СМ относительно UП.О формируется путем задержки, которая должна включаться в положительной фазе сигнала задания, но не позднее 1/fП до ее окончания.
В силу того, что величина постоянных составляющих пропорциональна частоте задания, наибольший эффект от предложенного способа достигается на частотах, близких к максимальным.
Таким образом, предложенный способ преобразования в сравнении с прототипом позволяет при сохранении всех достоинств ОШИМ значительно снизить колебания токов двигателя в переходных процессах, полностью исключить несимметрию фазных токов в установившихся режимах, связанную с соотношением частот задания и опорной пилы ШИМ, и тем самым улучшить качество переходных процессов в электроприводе за счет исключения постоянных составляющих в выходном напряжении автономного инвертора на субгармонических частотах.
Реализация заявленного способа в опытном образце дала положительные результаты и предполагается к использованию с 2008 года.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ВЕКТОРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2009 |
|
RU2402867C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2356160C1 |
| Способ преобразования постоянного напряжения в квазисинусоидальное с широтно-импульсной модуляцией для многоуровневых преобразователей частоты | 2024 |
|
RU2841510C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1994 |
|
RU2071634C1 |
| СПОСОБ СКАЛЯРНОГО УПРАВЛЕНИЯ (3×3)-ФАЗНЫМ МАТРИЧНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2010 |
|
RU2414800C1 |
| Способ формирования квазисинусоидального напряжения из постоянного напряжения | 1977 |
|
SU684697A1 |
| Способ управления автономным инвертором напряжения | 2016 |
|
RU2654295C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
| Способ управления инвертором напряжения | 1972 |
|
SU576651A1 |
| Преобразователь напряжения постоянного тока в переменный | 2024 |
|
RU2829159C1 |
Способ преобразования постоянного напряжения в квазисинусоидальное с широтно-импульсной модуляцией может быть использовано в системах управления преобразователями частоты. Достигаемый технический результат - повышение качества работы электропривода в установившемся режиме и переходных режимах за счет исключения постоянных составляющих в выходном напряжении автономного инвертора на субгармонических частотах. Способ преобразования заключается в сравнении положительной полуволны задающего (синусоидального) сигнала с опорным пилообразным сигналом, а отрицательной полуволны с сигналом пилообразного напряжения, который формируется путем смещения опорного пилообразного сигнала по времени на величину, вычисляемую каждый цикл задающего сигнала. 3 н.п. ф-лы, 7 ил.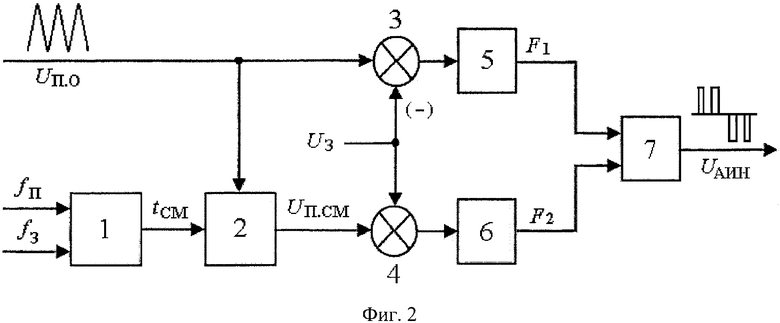
 ,
,
где k - целая часть отношения fп/fз,
fп - частота пилы широтно-импульсной модуляции;
fз - частота задающего сигнала.
 ,
,
где k - целая часть отношения fп/fз;
fп - частота пилы широтно-импульсной модуляции;
fз - частота задающего сигнала.
,
где k - целая часть отношения fп/fз;
fп - частота пилы широтно-импульсной модуляции;
fз - частота задающего сигнала.
| ИМПУЛЬСНО-МОДУЛИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012989C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1994 |
|
RU2071634C1 |
| КРЕМ ДЛЯ СУХОЙ КОЖИ ЛИЦА | 1993 |
|
RU2034539C1 |

