Изобретение относится к области электротехники и может быть использовано в системах управления инвертором с широтно-импульсной модуляцией для преобразователей частоты.
Известны способы преобразования постоянного напряжения в квазисинусоидальное с векторной широтно-импульсной модуляцией (ШИМ), в основе которых лежит принцип коммутации между несколькими, заранее выбранными состояниями инвертора, каждое из которых соответствует определенному пространственному положению вектора результирующего напряжения (H02K 17/02, Н02Р 8/00, US 4028600 A, 7.06.1977). Указанный способ имеет недостаток - сложную реализацию и большое искажение выходного напряжения.
Наиболее близким, взятым за прототип является способ управления преобразователем напряжения с векторной ШИМ (Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учеб. заведений. - М.: Академия, 2006, с.90-97 и фиг.1). Квазисинусоидальное напряжение формируется путем векторной широтно-импульсной модуляции, уровни переключения которой формируются при сравнении пилообразного сигнала несущей частоты с  для уровня переключения УП1 и с
для уровня переключения УП1 и с  для уровня переключения УП2, что отображено на фиг.1, где:
для уровня переключения УП2, что отображено на фиг.1, где:
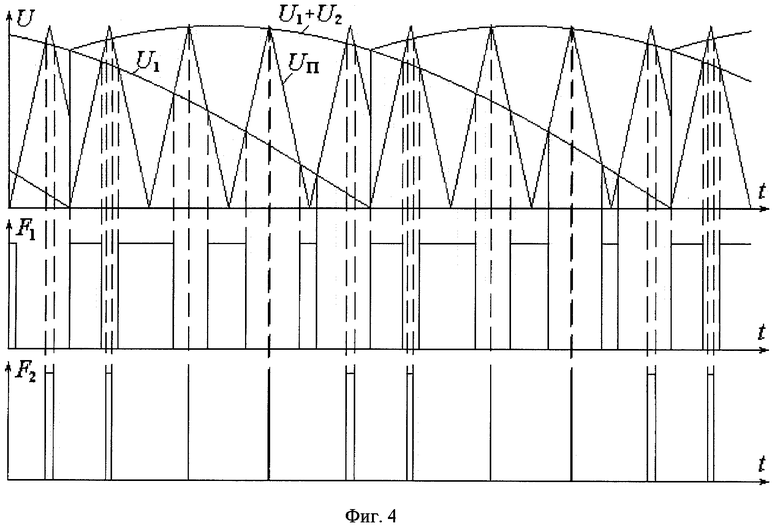
U - напряжение;
t - время;
U1, U2 - сигналы уровней переключения УП1 и УП2 соответственно;
UП - опорный пилообразный сигнал;
F1, F2 - сигналы коммутационных функций, получаемые в результате сравнения несущего пилообразного сигнала с сигналами уровней переключения УП1 и УП2 соответственно, используемые для формирования коммутационных функций управления силовыми ключами;
Um - амплитуда заданного напряжения;
Ud - напряжение звена постоянного тока АИН;
θ - угол внутри сектора, вычисляемый по формуле θ=α-(k-1)·π/3;
α - угол поворота вектора заданного напряжения;
k - номер сектора.
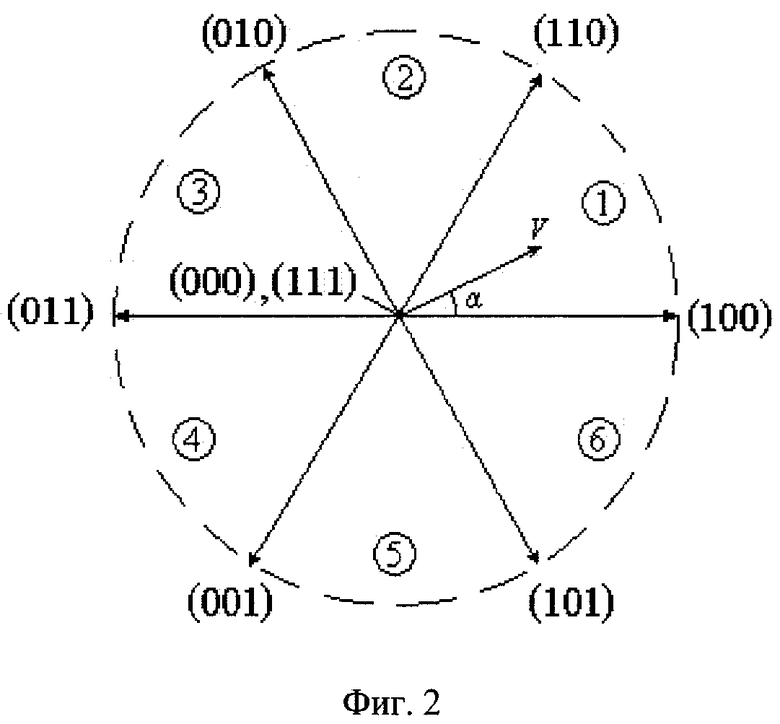
Данный способ преобразования постоянного напряжения в квазисинусоидальное с векторной широтно-импульсной модуляцией реализуется путем коммутации между несколькими заранее выбранными состояниями инвертора, каждое из которых соответствует определенному пространственному положению вектора результирующего напряжения (фиг.2),
где V - вектор заданного напряжения.
Недостатком данного способа является ухудшение качества работы электропривода в установившемся режиме и переходных режимах за счет появления при определенных соотношениях частоты пилообразного сигнала и частоты сигнала задания постоянных составляющих и дополнительных гармоник в выходном напряжении автономного инвертора напряжения (АИН), при этом могут возникать постоянные составляющие в токах фаз (до 20% от номинала) и, как следствие, дополнительные пульсации вращающего момента.
Постоянные составляющие появляются в том случае, если в периоде управляющего напряжения (TЗ) на входе АИН укладывается целое (четное или нечетное в зависимости от способа организации ШИМ) число периодов несущего пилообразного напряжения (Гц), вольт-секундная площадь работы верхних и нижних силовых ключей неодинакова. Если же в периоде управляющего напряжения укладывается дробное число периодов пилообразного напряжения, то возможно появление биений (постоянная составляющая изменяется по уровню и знаку с некоторой частотой, зависящей от соотношения частот управляющего и пилообразного напряжений), среднее значение постоянной составляющей по трем фазам при этом равно нулю. Критические (субгармонические) частоты (fKP), на которых возникают наибольшие постоянные составляющие, можно определить как
 ,
,
где  - целые числа;
- целые числа;
fП - частота пилы широтно-импульсной модуляции.
Чем меньше n, тем больше постоянные составляющие.
Технический результат предлагаемого способа - повышение качества работы электропривода в установившемся и переходном режимах за счет исключения постоянных составляющих и дополнительных гармоник в выходном напряжении автономного инвертора на субгармонических и дробных частотах, что позволяет исключить постоянные составляющие в токах фаз двигателя и вызванные ими колебания вращающего момента.
Технический результат достигается тем, что преобразование постоянного напряжения в квазисинусоидальное реализуется путем логического преобразования результата сравнения несущего пилообразного сигнала с сигналами уровней переключений: УП1, сформированного по формуле 
и УП2, сформированного по формуле  , при обнулении угла в по достижению им значения, равного π/3. Причем для достижения равенства площадей коммутационных функций положительной и отрицательной полуволн выходного напряжения АИН, а следовательно, и равенства работы верхних и нижних силовых ключей, при каждом достижении углом α значения кратного π/n, где n - целое число, принимающее значение 1 или 3, пилообразный сигнал сбрасывается в начальное состояние. Начальное состояние постоянно, а величина его находится в диапазоне от нуля до максимума пилы.
, при обнулении угла в по достижению им значения, равного π/3. Причем для достижения равенства площадей коммутационных функций положительной и отрицательной полуволн выходного напряжения АИН, а следовательно, и равенства работы верхних и нижних силовых ключей, при каждом достижении углом α значения кратного π/n, где n - целое число, принимающее значение 1 или 3, пилообразный сигнал сбрасывается в начальное состояние. Начальное состояние постоянно, а величина его находится в диапазоне от нуля до максимума пилы.
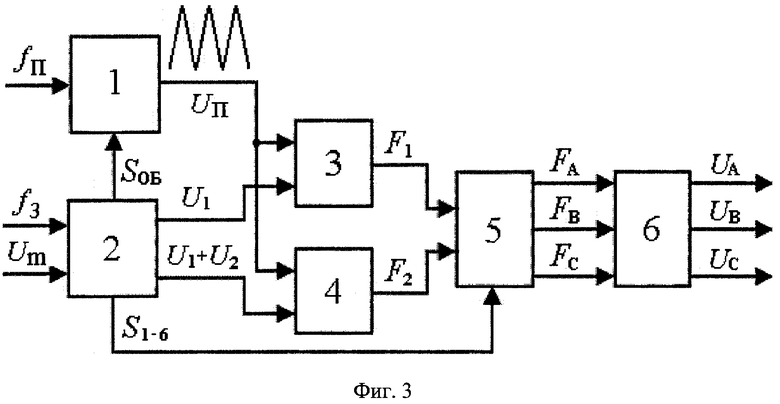
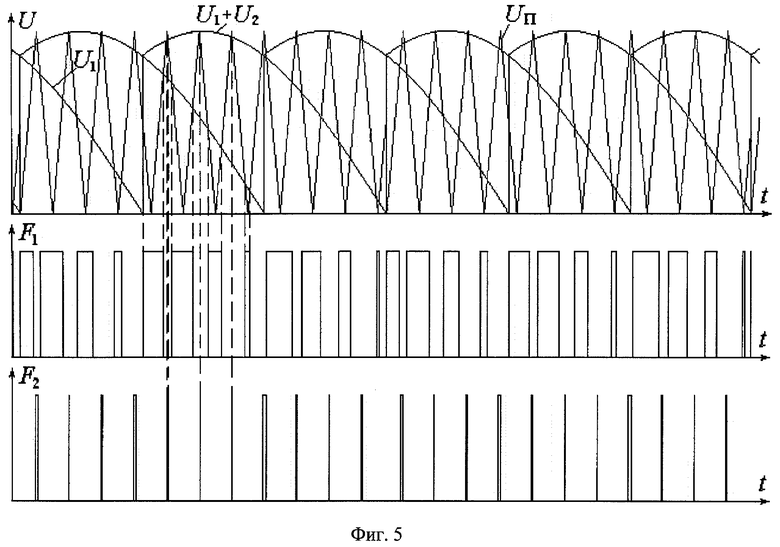
Пример реализации заявленного способа показан на структурной схеме АИН (фиг.3). Временные диаграммы, поясняющие предложенный способ, представлены на фиг.4 для n=1 и на фиг.5 для n=3, в которых начальным состоянием выбрано нулевое значение пилы. Где приняты следующие обозначения:
1 - блок формирования пилы;
2 - блок формирования уровней переключения;
3, 4 - нуль-орган;
5 - блок логики;
6 - блок силовой части АИН;
SОБ - сигнал сброса пилы в начальное состояние;
S1-6 - сигналы определения сектора работы;
fЗ - задание частоты напряжения;
FA, FB, FC - коммутационные функции управления силовыми ключами АИН фазы А, В, С соответственно;
UA, UB, UC - выходное напряжение АИН фазы А, В, С соответственно.
Приведенный на фиг.3 АИН работает следующим образом.
Сигналы задания частоты fЗ и амплитуды напряжения Um поступают на блок формирования уровней переключения 2, включающий в себя формирователь управляющих синусоидальных сигналов, вычислитель угла α, вычислитель угла θ, сбрасываемого в нулевое значение по достижении значения π/3, и блок логики, формирующий уровни переключения УП1 по формуле  и УП2 по формуле
и УП2 по формуле  , а также в зависимости от текущего угла α формируют сигналы определения сектора работы S1-6 и по достижении углом α величины, кратной π/n, формируют сигнал сброса пилы в начальное состояние SОБ, который вместе с сигналом частоты пилы широтно-импульсной модуляции fП поступает на вход блока формирования пилы 1. Выходом блока 1 является пилообразный сигнал UП, сбрасываемый в начальное значение сигналом SОБ. Далее сигнал UП подается на входы нуль-органа 3 вместе с сигналом уровня приключения УП1 U1 и на нуль-органа 4 вместе с сигналом уровня приключения УП2 U1+U2, выходом которых являются сигналы коммутационных функций F1, F2 соответственно, в свою очередь поступающие вместе с сигналами определения сектора работы S1-6 на блок логики 5. В результате работы блока 5 на его выходе образуются коммутационные функции FA, FB, FC управления силовыми ключами АИН, находящимися в блоке силовой части АИН 6, выходом которого является квазисинусоидальное напряжение требуемой частоты UA, UB, UC.
, а также в зависимости от текущего угла α формируют сигналы определения сектора работы S1-6 и по достижении углом α величины, кратной π/n, формируют сигнал сброса пилы в начальное состояние SОБ, который вместе с сигналом частоты пилы широтно-импульсной модуляции fП поступает на вход блока формирования пилы 1. Выходом блока 1 является пилообразный сигнал UП, сбрасываемый в начальное значение сигналом SОБ. Далее сигнал UП подается на входы нуль-органа 3 вместе с сигналом уровня приключения УП1 U1 и на нуль-органа 4 вместе с сигналом уровня приключения УП2 U1+U2, выходом которых являются сигналы коммутационных функций F1, F2 соответственно, в свою очередь поступающие вместе с сигналами определения сектора работы S1-6 на блок логики 5. В результате работы блока 5 на его выходе образуются коммутационные функции FA, FB, FC управления силовыми ключами АИН, находящимися в блоке силовой части АИН 6, выходом которого является квазисинусоидальное напряжение требуемой частоты UA, UB, UC.
В силу того что величина постоянных составляющих пропорциональна частоте задания, наибольший эффект от предложенного способа достигается на частотах, близких к максимальным.
Таким образом, предложенный способ преобразования в сравнении с прототипом позволяет при сохранении всех достоинств векторной ШИМ значительно снизить колебания токов двигателя в переходных процессах, полностью исключить несимметрию фазных токов в установившихся режимах, связанную с соотношением частот задания и опорной пилы ШИМ, и тем самым улучшить качество переходных процессов в электроприводе за счет исключения постоянных составляющих в выходном напряжении автономного инвертора на субгармонических частотах.
Реализация заявленного способа в опытном образце дала положительные результаты и предполагается к использованию с 2010 года.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2356160C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2348100C1 |
| СПОСОБ СКАЛЯРНОГО УПРАВЛЕНИЯ (3×3)-ФАЗНЫМ МАТРИЧНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2010 |
|
RU2414800C1 |
| Способ преобразования постоянного напряжения в квазисинусоидальное с широтно-импульсной модуляцией для многоуровневых преобразователей частоты | 2024 |
|
RU2841510C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЧАСТОТЫ | 2003 |
|
RU2269860C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХЗВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2010 |
|
RU2444834C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1994 |
|
RU2071634C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2522675C2 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ТРЕХФАЗНОЕ КВАЗИСИНУСОИДАЛЬНОЕ | 2012 |
|
RU2509404C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ТРЕХФАЗНОЕ КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2013 |
|
RU2563247C1 |
Изобретение относится к области электротехники и может быть использовано в системах управления инвертором с широтно-импульсной модуляцией для преобразователей частоты. Техническим результатом является повышение качества работы электропривода в установившемся режиме и переходных режимах за счет исключения постоянных составляющих в выходном напряжении автономного инвертора на субгармонических частотах. Способ преобразования заключается в логическом преобразовании результата сравнения несущего пилообразного сигнала с сигналами уровней переключений, причем при каждом достижении углом вектора заданного напряжения значения, кратного π/n, где n - целое число, принимающее значение 1 или 3, пилообразный сигнал сбрасывают в начальное состояние, которое заранее определено и находится в диапазоне от нуля до максимума амплитуды пилы. 5 ил.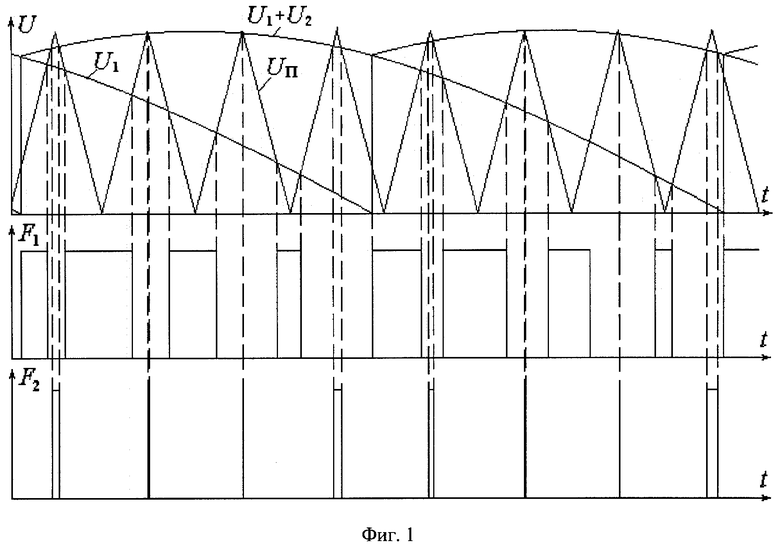
Способ преобразования постоянного напряжения в квазисинусоидальное с векторной широтно-импульсной модуляцией, заключающийся в логическом преобразовании результата сравнения несущего пилообразного сигнала с сигналами уровней переключений, отличающийся тем, что при каждом достижении углом поворота вектора заданного напряжения значения, кратного π/n, где n - целое число, принимающее значение 1 или 3, пилообразный сигнал сбрасывают в начальное состояние, которое заранее определено и находится в диапазоне от нуля до максимума амплитуды пилы.
| СПОСОБ СНИЖЕНИЯ ВИБРАЦИИ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2234184C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
| US 2003052642 А1, 20.03.2003 | |||
| Способ диагностики Desulfovibrio spp. при нарушениях микробиоценоза желудочно-кишечного тракта | 2023 |
|
RU2821995C1 |
| DE 102007027872 А1, 20.12.2007 | |||
| ЕР 1480328 А2, 24.11.2004. | |||

