Предлагаемое изобретение относится к авиационной технике, а именно к аппаратам вертикального взлета и посадки типа «летающая платформа», и может быть использовано силами специального назначения при проведении локальных операций на земной и водной поверхности, а также для эвакуации пострадавших.
В числе основных проблем при создании легких летательных аппаратов вертикального взлета и посадки отмечаются следующие:
- обеспечение необходимой тяговооруженности и полноты ее использования при минимальной массе и габаритах силовой установки;
- обеспечение экономичного взлета, посадки и продолжительного полета;
- обеспечение возможности безаварийной посадки аппарата в случаях отказа силовой установки:
- создание системы управления аппаратом, обеспечивающей гарантированную безопасность полета.
Известны несколько подходов к решению данных проблем.
Так, известен летательный аппарат Curtiss Wright VZ-7 (США), содержащий фюзеляж, выполненный в виде рамы, на которой размещены открытый пост управления и кресло пилота. В передней части рамы размещены справа и слева угловые редукторы, на валах которых закреплены с возможностью их вращения воздушные винты. В хвостовой части рамы также размещены угловые редукторы с воздушными винтами. Воздушные винты посредством редукторов и валов кинематически связаны с силовой установкой, размещенной в центре рамы (фюзеляжа). Такая кинематическая схема позволяет обеспечивать синхронизацию оборотов всех четырех винтов, но за счет увеличения массы аппарата. Управление таким аппаратом обеспечивается путем дифференциального изменения тяги передних и задних винтов пропорционально их шагу, задаваемому командными органами управления (см. Всемирную сеть Internet file: //E:/TMP/Curtiss-Wright%20VZ-7.htm/.
Недостаточная отказобезопасность полета аппарата, при наличии одной силовой установки в совокупности с несколькими редукторами, приводила к большим потерям мощности, передаваемой на воздушные винты, что в итоге выразилось в очень низкой скорости полета аппарата и чрезвычайно малом потолке, который достигался им. Такая кинематическая схема раздачи мощности на воздушные винты аппарата требует значительных затрат на обслуживание.
Известен также самолет с вертикальным взлетом и посадкой (патент США D498201 «Moller International» D12/319), который выполнен по аэродинамической схеме «Утка» с дополнительным горизонтальным оперением. Самолет содержит фюзеляж с кабиной экипажа, к которому прикреплены аэродинамические поверхности, несущие на своих концевых частях горизонтально расположенные мотогондолы с вентиляторными силовыми установками. Силовые установки оснащены сопловыми устройствами с поворотными решетками, отклоняющими вектор тяги на 90°.
Данная компоновка самолета с разнесенными основными агрегатами, крылом, фюзеляжем, оперением, силовыми установками в мотогондолах не обеспечивает компактно сформированной конструкции, что отрицательно влияет на его маневренность и делает его непригодным для использования при проведении спецопераций в районах интенсивной застройки. Данный аппарат неспособен работать в эпицентрах разрушений, аварий и катастроф, когда надо срочно вывезти раненых, доставить медикаменты, предметы первой помощи, с выполнением посадки на разрушенную поверхность с остатками строений. Степень отрицательного влияния аппарата на окружающую среду весьма высока.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является «Летающий автомобиль» США Ди-Стар Инжиниринг «Д'Скутер» (Jane's Defence Weekly, 16/VII 2003, №2, v.40, p.10).
Аппарат содержит плоский фюзеляж с кабиной экипажа, П-образное оперение, силовую установку, состоящую из трех вентиляторных двигателей: переднего подъемного и хвостовых подъемно-маршевых.
Недостатками такого аппарата являются ассиметрия и несбалансированность по реактивным моментам от вентиляторов (отсутствие компенсации момента третьего вентилятора), несбалансированность по действию векторов тяг при отказе любого из вентиляторов, приводящих к валежке и вращению аппарата вокруг его продольной оси, а также отсутствие средств создания подъемной силы в дополнение к силам, создаваемым подъемным и подъемно-маршевым агрегатами, что делает его менее надежным и небезопасным при возможных отказах силовой установки в горизонтальной конфигурации полета.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение безопасности и надежности аппарата путем сбалансированности по реактивным моментам силовых установок, т.е. при наличии их четного количества с противоположным вращением вентиляторов.
Кроме того, ставится задача создания такого аппарата, который имел бы несущий фюзеляж в форме крыла, создающего подъемную силу при полете в горизонтальной конфигурации на возможно малых скоростях, внутри которого могли быть размещены подъемные и подъемно-маршевые агрегаты.
Третьей задачей изобретения является создание такого аппарата, который имел бы средства компенсации подъемной силы на переходных режимах, т.е. при отклонении векторов тяг подъемно-маршевых агрегатов из вертикального направления в горизонтальное имел бы дополнительную подъемную силу.
Четвертой задачей является создание такого аппарата, который имел бы эффективные средства управления пространственным положением во всем диапазоне скоростей полета с учетом всех его динамических параметров.
Пятой задачей является создание такого аппарата, который мог быть оснащен взлетно-посадочными средствами с возможностью их уборки в полете и выпуска при посадке, позволяющими производить взлет-посадку на снег, лед, грунт, песок, водную и заболоченную поверхность и т.п.
Шестой задачей является создание такого аппарата, который сочетал бы в себе свойства экраноплана и судна на воздушной подушке и обеспечивал бы экономичные полеты на более дальние расстояния, чем в режимах вертикального взлета и посадки.
Поставленные задачи решаются в результате того, что легкий многорежимный летательный аппарат, содержащий плоский фюзеляж с подъемным и подъемно-маршевыми вентиляторами в кольцевых каналах, кабину экипажа на его верхней поверхности и П-образное хвостовое оперение, снабжен четным количеством передних подъемно-маршевых вентиляторов в каналах и управляемых хвостовых поворотных подъемно-маршевых вентиляторов в кольцах. Плоский фюзеляж выполнен в форме аэродинамического крыла малого удлинения, над верхней хвостовой частью которого размещен набор управляемых решетчатых крыльев, ограниченных по концевым участкам вертикальным оперением, между плоскостями которого за решеткой крыльев установлены управляемые хвостовые поворотные подъемно-маршевые вентиляторы в кольцах. На нижней поверхности крыла выполнены осепараллельные диффузорные каналы, а каналы передних подъемно-маршевых вентиляторов сообщены с диффузорными каналами и снабжены управляемыми элерон-лопатками. Управление аппаратом, кроме ручного, осуществляется автоматически в соответствии с реализуемыми синергетическими законами единства процессов адаптации и управления. Взлетно-посадочные устройства выполнены в виде комбинированного газонаполненного лыжного шасси и адаптивного пневмоамортизатора с возможностью его уборки и размещения внутри крыла.
Сущность предлагаемого изобретения заключается в том, чтобы на режимах вертикального взлета и посадки аппарат мог применяться на неподготовленных площадках и в труднодоступных зонах без риска своего повреждения; в случаях возможных отказов силовых установок мог совершить безаварийную посадку; оптимально использовал мощности силовых установок в комбинации с аэродинамикой несущих поверхностей, а также с поверхностями управления по единым для них законам управления и адаптации; мог обеспечить возможность взлета-посадки с водной поверхности и обеспечить экономичный горизонтальный полет на экранном режиме.
Возможность использования аппарата для совершения вертикальной посадки и взлета в труднодоступных зонах обеспечивается выполнением аппарата по схеме «летающая платформа» с подъемно-маршевыми агрегатами в каналах и тяговых поворотных кольцах. Причем сама платформа выполнена в виде крыла малого удлинения и способна в горизонтальном полете создавать подъемную силу, а также создавать аэродинамическое торможение с выходом на большие углы атаки при заходе на вертикальную посадку. Четное количество подъемно-маршевых вентиляторов позволяет в случаях возможного отказа одного из них, например, при вертикальном взлете-посадке перейти на чрезвычайный режим двух других, расположенных по диагонали относительно оси аппарата, с выключением вентилятора, расположенного по диагонали напротив отказавшего, и произвести аварийную посадку без повреждений.
Установка набора управляемых решетчатых крыльев над верхней хвостовой частью крыла, ограниченных по концевым участкам вертикальным оперением, и установка за решетчатыми крыльями поворотных подъемно-маршевых вентиляторов образуют аэродинамическую систему, сквозь которую просасывается интенсивный, высокоскоростной поток воздуха, устраняющий положительный градиент давления над верхней поверхностью крыла малого удлинения, что, в конечном итоге, предотвращает срыв потока с крыла в большом диапазоне его углов атаки и создает дополнительную подъемную силу на переходных режимах.
Выполнение диффузорных каналов на нижней поверхности крыла малого удлинения аппарата и перепуск в них части воздушного потока от передних подъемно-маршевых вентиляторов управляемыми элерон-лопатками позволяют обеспечивать более эффективное поперечное управление аппаратом на малом плече действия управляющих моментов на нулевой и очень малых скоростях полета, в том числе в режиме зависания.
В диффузорных каналах формируются воздушные жгуты, позволяющие уменьшать перетекание воздуха в полете с нижней поверхности крыла на верхнюю, что ведет, в конечном итоге, к уменьшению индуктивного сопротивления крыла малого удлинения и повышению его аэродинамического качества. В режиме околоэкранного полета в диффузорных каналах за счет скоростного напора обеспечивается создание динамической воздушной подушки, удерживающей аппарат на расчетной высоте с минимальными энергозатратами.
Алгоритмы управления положением управляющих поверхностей совместно с автоматическим изменением режимов работы подъемно-маршевых вентиляторов аппарата формируются на основе универсальных базовых синергетических законов управления пространственным движением (Колесников А.А., Мушенко А.С. «Синергетическое управление процессами пространственного движения летательных аппаратов». Авиакосмическое приборостроение, 2004, №2); (Колесников А.А. «Синергетические методы управления авиационными объектами и системами». Авиакосмическое приборостроение, 2004, №8) с учетом особенностей компоновочной схемы данного летательного аппарата. При таком подходе к построению системы управления в регуляторе формируется вектор управляющих воздействий с учетом всех переменных состояния системы, т.е. разбиение на отдельные контуры управления и построение изолированных следящих систем для каждого канала не производится. Последнее позволяет учесть динамические свойства математической модели летательного аппарата (ЛА) при аналитическом конструировании законов управления, что обеспечивает наибольшую адекватность системы управления физическому объекту.
Синергетические законы изменения положения управляющих поверхностей и управления режимами работы подъемно-маршевых вентиляторов аппарата обеспечивают в присутствии внешних возмущающих факторов координирующее управление с учетом естественных свойств летательного аппарата как нелинейного объекта механической природы.
При этом будут достигаться поставленные цели управления - ведение аппарата по заданному маршруту (траектории полета) с контролем его положения по данным навигационной системы, а также обеспечение автоматического взлета, торможения, зависания, посадки и полета на экранном режиме. Кроме того, использование автопилота, в основу которого заложены синергетические законы управления пространственным движением, обеспечит автоматический вывод аппарата из предкритических режимов полета и предотвратит его попадание в критические режимы полета. В бортовой системе автоматического управления (БСАУ) аппаратом кроме реализации синергетических алгоритмов управления пространственным движением решается, в том числе, задача энергосбережения, заключающаяся в оптимальном распределении энергии между бортовыми источниками питания и потребителями.
Данная стратегия управления имеет принципиальные отличия от традиционных систем автоматического управления полетом:
- разбиение на отдельные изолированные контуры управления для каждого канала не происходит, управляющие воздействия вычисляются совместно на основе универсальных синергетических алгоритмов пространственного движения с учетом информации обо всех переменных состояния системы. Таким образом, при вычислении вектора взаимосвязанных управляющих воздействий учитываются перекрестные связи между каналами управления, взаимное влияние которых на некоторых этапах полета может иметь большое значение;
- используемые универсальные синергетические алгоритмы пространственного движения получены в аналитическом виде без линеаризации математической модели, что позволяет наиболее адекватно описать процессы пространственного движения, а также не «привязывать» алгоритмы управления автопилота к конкретному объекту и его параметрам. Аэродинамические параметры и компоновочная схема данного ЛА задаются в виде специальных алгебраических уравнений связи (Буков В.Н. «Адаптивные прогнозирующие системы управления полетом», М., Наука, 1987 г.), с помощью которых вычисляются непосредственно уставки для исполнительных органов системы.
Наличие комбинации газонаполненного лыжного шасси с адаптивным пневмоамортизатором позволяет аппарату выполнять безопасную посадку на неподготовленные площадки, в том числе на снег, лед, грунт, песок, водную и заболоченную поверхность без поломок. Пневмоамортизатор вместе с газонаполненным лыжным шасси способен придавать аппарату плавучесть, причем лыжное шасси в этом случае работает в роли поплавков, обеспечивающих поперечную устойчивость аппарата на воде. В режиме глиссирования пневмоамортизатор, имеющий много секций, заполняется воздухом таким образом, что его нижняя часть создает гидродинамическую силу, обеспечивающую скольжение аппарата по поверхности воды.
В целом газонаполненное лыжное шасси вместе с адаптивным пневмоамортизатором выполняют роль механизма, поглощающего и рассеивающего энергию возможного посадочного удара как при вертикальной посадке, так и посадке с небольшой горизонтальной скоростью.
Возможность уборки пневмоамортизатора внутрь крыла реализуется посредством специальных гофроцилиндров, позволяющих обеспечить как уборку, так и выпуск пневмоамортизатора без применения сложных механических систем. Уборка пневмоамортизатора производится вакуумированием, а выпуск избыточным давлением воздуха от одного и того же компрессора с эжектором. Ниша в нижней части крыла позволяет разместить убранный пневмоамортизатор в ней с последующим закрытием ниши нижним основанием пневмоамортизатора и постановкой его на замки, что позволяет иметь удобообтекаемую поверхность нижней части крыла малого удлинения, являющегося основным агрегатом данного аппарата.
Предлагаемое изобретение поясняется чертежами, где:
- на фиг.1 - вид аппарата сбоку с сечением крыла по диффузорным каналам в горизонтальном полете;
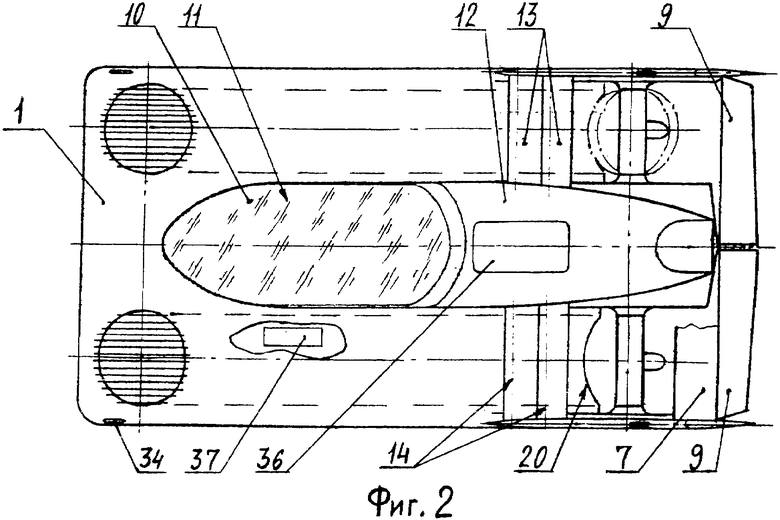
- на фиг.2 - вид аппарата сверху;
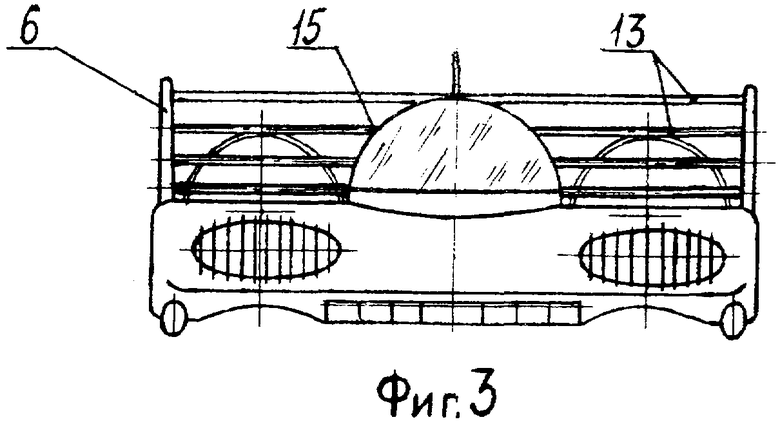
- на фиг.3 - вид аппарата спереди;
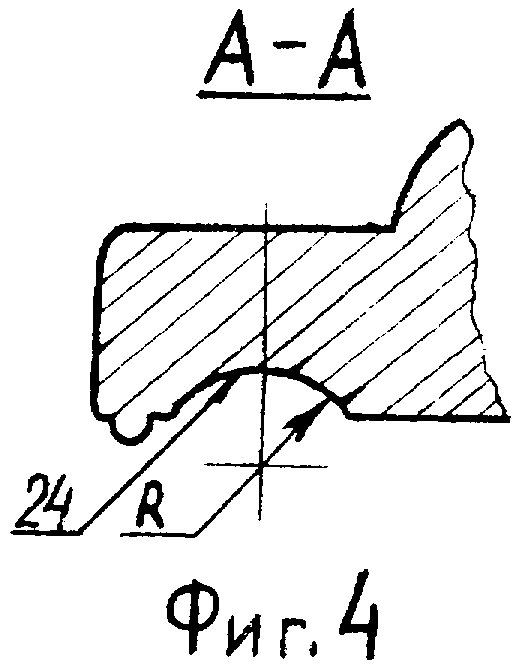
- на фиг.4 - сечение аппарата А-А;
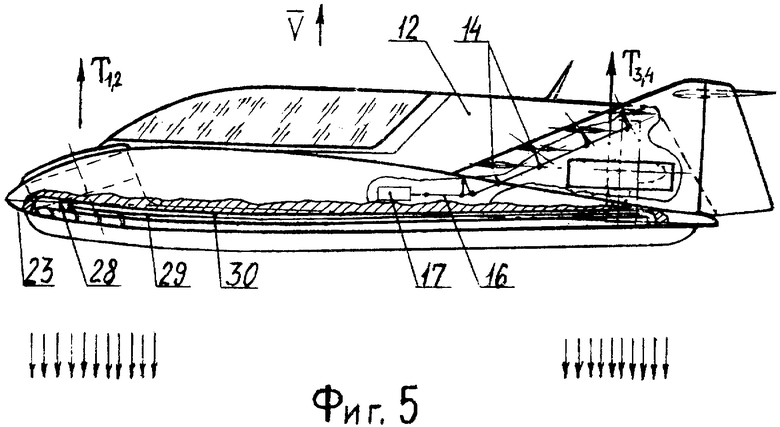
- на фиг.5 - вид аппарата сбоку с убранным пневмоамортизатором при вертикальном взлете;
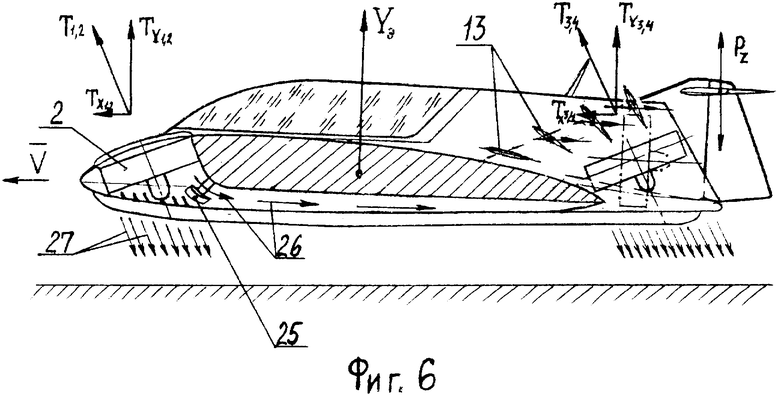
- на фиг.6 - вид аппарата сбоку при полете над экраном;
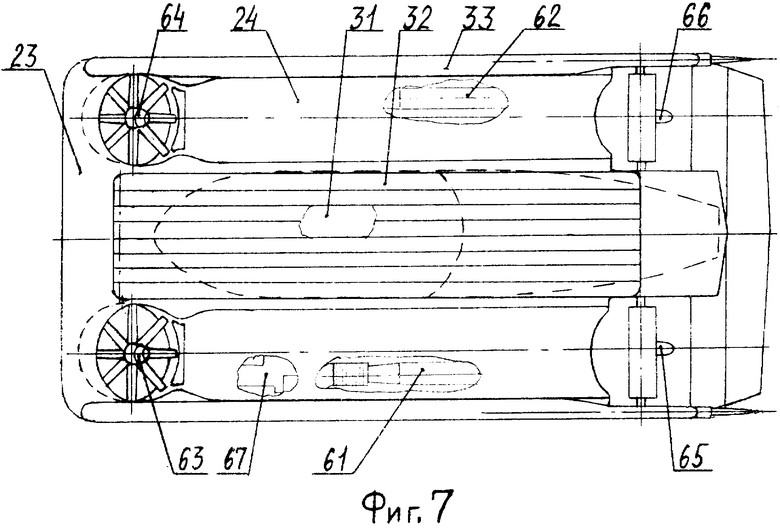
- на фиг.7 - вид аппарата снизу;
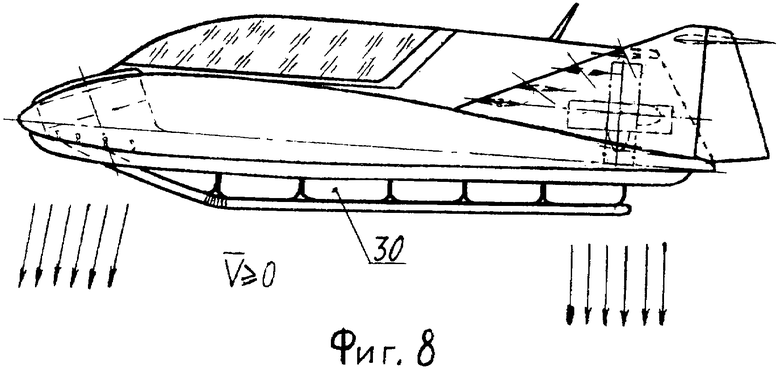
- на фиг.8 - вид аппарата сбоку в режиме торможения и зависания с выпущенным пневмоамортизатором;
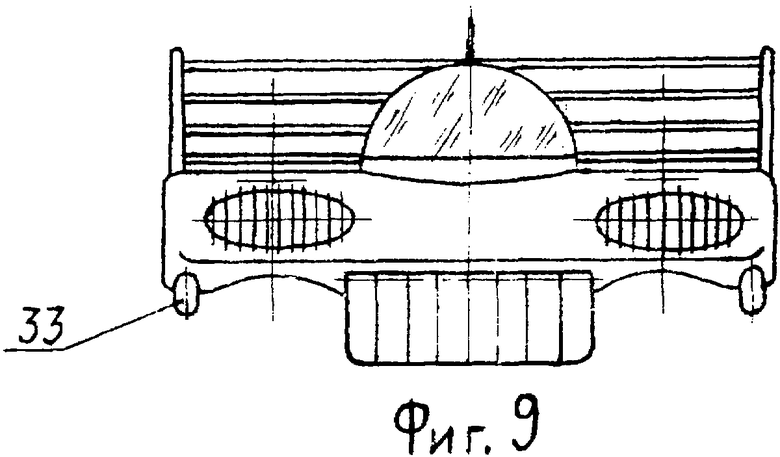
- на фиг.9 - вид аппарата спереди при заходе на посадку с выпущенным пневмоамортизатором в режиме торможения;
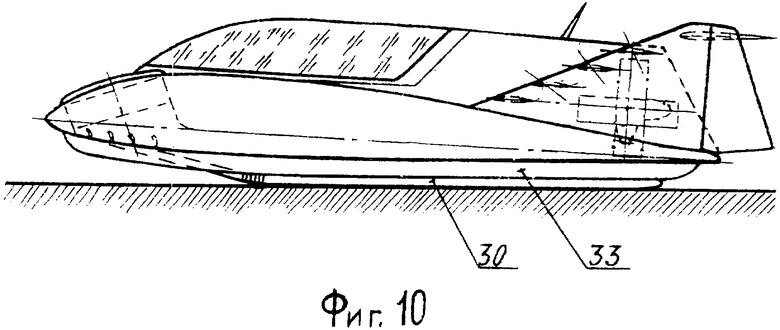
- на фиг.10 - вид аппарата сбоку при посадке в момент неполного обжатия пневмоамортизатора;
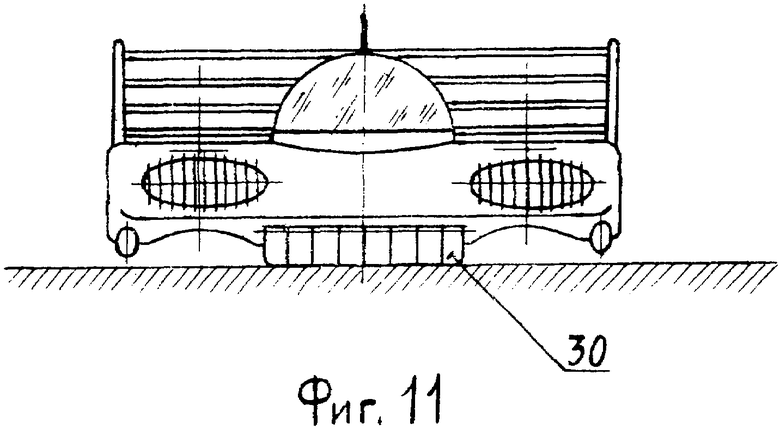
- на фиг.11 - вид аппарата спереди при посадке в момент неполного обжатия пневмоамортизатора;
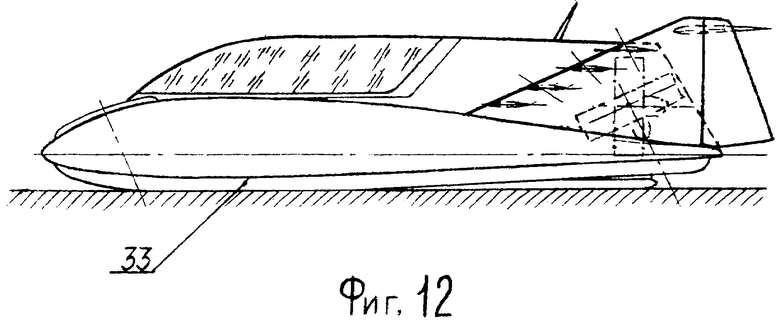
- на фиг.12 - вид аппарата сбоку в завершающий момент посадки;
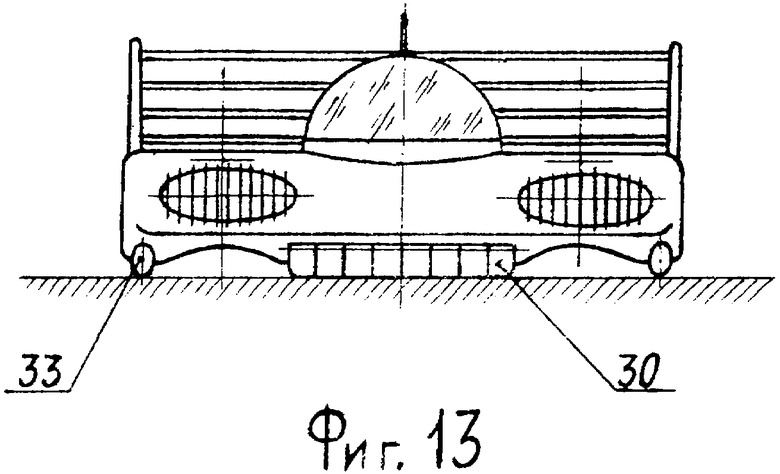
- на фиг.13 - вид аппарата спереди в завершающий момент посадки;
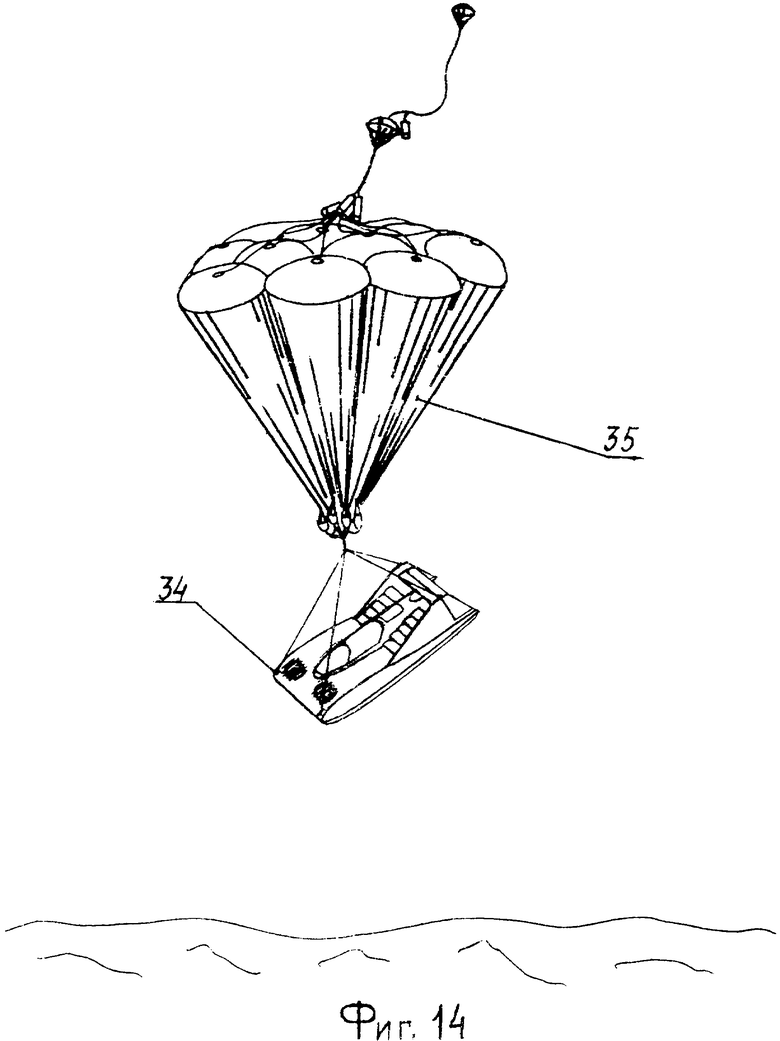
- на фиг.14 - аппарат в режиме использования парашютной системы спуска;
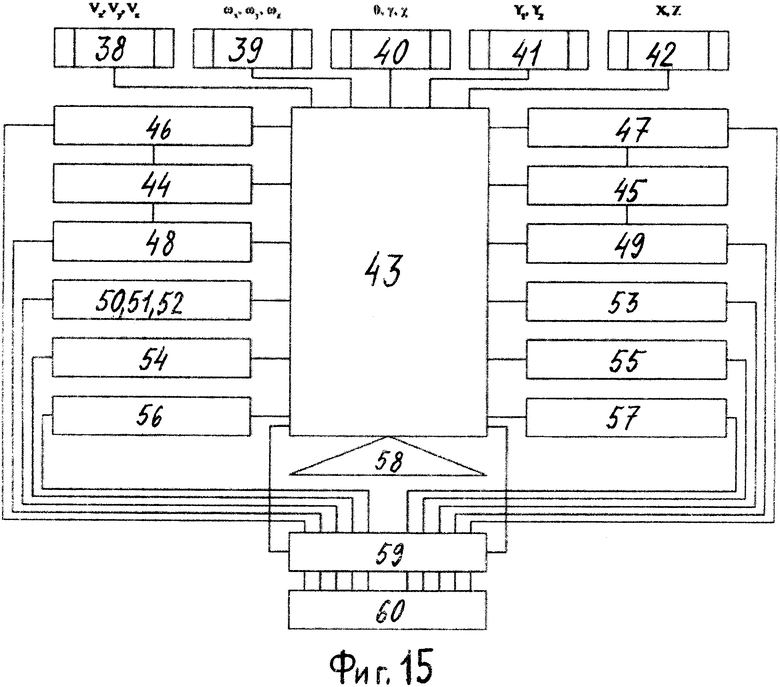
- на фиг.15 - функциональная схема системы управления аппаратом.
Стрелками показаны: направления потоков от вентиляторов:
T1,2 - вектор тяги передних подъемно-маршевых вентиляторов;
Т3,4 - вектор тяги хвостовых поворотных подъемно-маршевых вентиляторов;
ТX 1,2 - горизонтальная составляющая тяги передних вентиляторов;
ТX 3,4 - горизонтальная составляющая тяги хвостовых вентиляторов;
ТY 1,2 - вертикальная составляющая тяги передних вентиляторов;
ТY 3,4 - вертикальная составляющая тяги хвостовых вентиляторов;
Yк - подъемная сила крыла в свободном полете;
Yэ - подъемная сила крыла у экрана;
У1, У2, У3, У4 - подъемная сила решетчатых крыльев (Ур.к);
РZ - управляющая сила по тангажу;
F - фокус крыла;
ΔYк - приращение подъемной силы крыла;
а - расстояние между фокусом и центром масс;
ΔMz - стабилизирующий момент;
V - скорость и направление полета;
ц.м. - центр масс аппарата.
Легкий многорежимный летательный аппарат содержит аэродинамическое крыло малого удлинения 1, в котором размещены подъемно-маршевые вентиляторы 2 в каналах 3, нижние части которых оснащены направляющими лопатками 4. В хвостовой части крыла 1 установлено П-образное оперение 5, состоящее из плоскостей вертикального оперения 6 и горизонтального оперения 7. Вертикальное оперение 6 оснащено поворотными плоскостями рулей направления 8. Горизонтальное оперение 7 оснащено поворотными плоскостями рулей высоты 9.
На верхней поверхности аэродинамического крыла 1 размещена кабина экипажа 10, закрытая фонарем 11 с обтекателем 12. Над верхней хвостовой частью аэродинамического крыла 1 между плоскостями вертикального оперения 6 и обтекателем 12 размещен набор управляемых решетчатых крыльев 13, каждое из которых имеет ось вращения 14, закрепленную одним концом в плоскости оперения 6, а другим в узлах 15 обтекателя 12 и соединенную проводкой управления 16 с сервоприводом 17. За управляемыми решетчатыми крыльями 13 между плоскостями вертикального оперения 6 установлены управляемые поворотные подъемно-маршевые вентиляторы 18 в тяговых кольцах 19. В местах установки управляемых поворотных подъемно-маршевых вентиляторов 18 выполнены фигурные вырезы 20 в аэродинамическом крыле 1, позволяющие вентиляторам 18 в кольцах 19 устанавливаться в довольно широком диапазоне углов, под действием усилий, передаваемых проводкой управления 21 от сервоприводов 22. Нижняя поверхность 23 аэродинамического крыла 1 снабжена осепараллельными диффузорными каналами 24, в которые элерон-лопатками 25 перепускается часть воздушных потоков 26 от основных воздушных потоков 27, создаваемых подъемно-маршевыми вентиляторами 2. Там же размещена ниша 28, в которую в ненаполненном состоянии компактно уложен в виде пакета 29 пневмоамортизатор 30, закрываемый нижним основанием 31 с антифрикционным покрытием 32. Периферийная часть нижней поверхности 23 аэродинамического крыла 1 справа и слева от оси аппарата оснащена лыжным шасси 33.
Аппарат оснащен узлами крепления 34 парашютной системы 35, обеспечивающей его снижение с заданной вертикальной скоростью при десантировании и в аварийной ситуации. Парашютная система 35 уложена в контейнер спасательной системы 36.
Система управления аппаратом 37 включает в себя:
- датчики скорости полета 38;
- датчики угловых ускорений 39;
- датчики угловых отклонений 40;
- датчики высоты полета 41;
- датчики позиционирования 42;
- бортовой процессор (БСАУ) 43;
- подсистему управления турбогенератора №1 - 44;
- подсистему управления турбогенератора №2 - 45;
- подсистему управления подъемно-маршевыми вентиляторами №1 - 46;
- подсистему управления подъемно-маршевыми вентиляторами №2 - 47;
- подсистему управления поворотными подъемно-маршевыми вентиляторами №3 - 48;
- подсистему управления поворотными подъемно-маршевыми вентиляторами №4 - 49;
- подсистему управления рулями направления 50;
- подсистему управления рулями высоты 51;
- подсистему управления элерон-лопатками 52;
- подсистему обеспечения экономичного горизонтального полета 53;
- подсистему управления решетчатыми крыльями 54;
- подсистему управления направляющими лопатками 55;
- подсистему управления поворотом подъемно-маршевых вентиляторов №3, №4 - 56;
- подсистему управления пневмоамортизатором 57;
- блок ввода программ 58;
- блок сравнения 59;
- блок команд ручного управления 60.
Энергоустановка аппарата включает в себя турбогенераторы №1 - 61 и №2 - 62; электроприводы №1 - 63 и №2 - 64 подъемно-маршевых вентиляторов 2; электроприводы №3 - 65 и №4 - 66 поворотных подъемно-маршевых вентиляторов 18, а также аппаратуру управления, распределения и коммутации 67.
Легкий многорежимный летательный аппарат работает следующим образом. При стоянке на поверхности земли аппарат опирается на лыжное шасси 33, которое выполнено из полых эластичных труб, наполненных газообразной средой, например воздухом. Пневмоамортизатор при этом убран в виде пакета 29 в нишу 28 и закрыт нижним основанием 31.
Перед выполнением взлета в кабине 10 аппарата на приборной панели включаются подсистемы управления 44, 45 турбогенераторами №1 и №2. Производится запуск турбогенераторов. Сигналы об их готовности к работе поступают в бортовой процессор 43, который дает команду на включение электропитания приводов пары подъемно-маршевых вентиляторов 2, расположенных в каналах 3 носовой части аппарата, и пары поворотных подъемно-маршевых вентиляторов 18, расположенных в хвостовой части аппарата, которые размещены в тяговых кольцах 19. Под действием силы тяги пары передних вентиляторов 2 и пары хвостовых вентиляторов 18 аппарат взлетают вертикально (Фиг.5). Продольное управление аппарата осуществляется путем дифференциального изменения тяги пары передних 2 и пары хвостовых вентиляторов 18, поперечное - путем дифференциального изменения силы тяги переднего 2 и хвостового вентиляторов 18, расположенных слева от оси аппарата, или переднего 2 и хвостового вентиляторов 18, расположенных справа от оси.
Одновременно поперечное управление ввиду малого плеча действия управляющих сил и моментов осуществляется посредством отклонения части потоков воздуха 26 от основных потоков 27, отбрасываемых передними вентиляторами 2 в диффузорные каналы 24 посредством ввода в основные потоки 27 элерон-лопаток 25, попеременно - «левой» или «правой», что вызывает крен аппарата в соответствующую сторону «влево» или «вправо». При этом основной поток 27 теряет часть потока 26, создавая тем самым меньшую тягу, что и приводит к крену в сторону выпущенной элерон-лопатки.
Эффективность этого способа управления возрастает также за счет последующего направления потоков 26 в диффузорные каналы 24 элерон-лопатками 25. При этом во входе в диффузорные каналы 24 потоки 26 развивают относительно большую скорость и, соответственно, создают разрежение на поверхности каналов 24, что и приводит к появлению аэродинамической силы, обеспечивающей более эффективный крен аппарата в сторону выпущенной элерон-лопатки 25.
Путевое управление аппаратом осуществляется дифференциальным отклонением направляющих лопаток 4, размещенных на выходе подъемно-маршевых вентиляторов 2. После выполнения вертикального взлета и набора безопасной высоты многорежимный летательный аппарат переходит из режима вертикального взлета и посадки в горизонтальный полет (Фиг.1). При этом его поворотные подъемно-маршевые вентиляторы 18 в тяговых кольцах 19 плавно переводятся в положение «разгона» аппарата, когда оси поворотных подъемно-маршевых вентиляторов 18 занимают положение, параллельное осям подъемно-маршевых вентиляторов 2, установленных в неподвижных каналах 3, а направляющие лопатки 4 устанавливаются по потоку подъемно-маршевых вентиляторов 2. Также одновременно с поворотом подъемно-маршевых вентиляторов 18 в положение разгона изменяет свои углы остановки набор управляемых решетчатых крыльев 13, обеспечивая поступление воздуха в вентиляторы 18 с минимальными потерями. Возникающее на решетчатых крыльях 13 разрежение обеспечивает появление суммарной подъемной силы, которая компенсирует потери тяги вентиляторов 18 при переводе их вектора из вертикального направления в горизонтальное. По мере дальнейшего поворота подъемно-маршевых вентиляторов 18 из положения «разгона» в положение «горизонтального полета» суммарная подъемная сила решетчатых крыльев 13 возрастает и с нарастанием скорости аппарата становится одной из составляющих полной аэродинамической подъемной силы аппарата.
Оптимальные углы установки решетчатых крыльев 13 обеспечивает Бортовая Система Автоматического Управления 43 через подсистему управления решетчатыми крыльями 54 в соответствии с заданными синергетическими алгоритмами управления.
В горизонтальном полете функции путевого управления переходят к поворотным плоскостям рулей направления 8, размещенных на вертикальном оперении 6.
Функции продольного управления переходят к поворотным плоскостям рулей высоты 9, размещенных на горизонтальном оперении 7.
Вертикальный взлет аппарата обеспечивают силы тяги подъемно-маршевых вентиляторов 2 (Т1,2) и силы тяги поворотных подъемно-маршевых вентиляторов 18 (Т3,4). Горизонтальный полет аппарата обеспечивают составляющие тяги вентиляторов 2 (ТX 1,2) и тяги вентиляторов 18 (Т3,4), которые с поворотом из положения вертикальной тяги меняют свое направление и обеспечивают аппарату эффективную пропульсивную силу.
Подъемная сила в горизонтальном полете аппарата складывается из составляющей тяги вентиляторов 2 (ТX 1,2), подъемной силы крыла малого удлинения 1 (Yк) и подъемных сил каждого из решетчатых крыльев 13 (У1, У2, У3, У4).
Подъемная сила каждого из решетчатых крыльев 13 (У1, У2, У3, У4) возникает в результате обтекания их потоком воздуха, засасываемого вентиляторами 18. Обтекая каждое из крыльев 13 воздушный поток создает на их поверхности разность давлений, что и обуславливает появление суммарной подъемной силы У1+У2+У3+У4=Урк, создаваемой набором решетчатых крыльев 13.
В горизонтальном полете продольная устойчивость аппарата так же, как и у самолета, обеспечивается положением аэродинамического фокуса F позади центра масс (ц.м.) аппарата, что способствует появлению стабилизирующего момента ΔMz=ΔYк·a. Для смещения фокуса F в расчетную точку, за центр масс, применено горизонтальное оперение 7. Кроме того, смещению фокуса F способствует набор решетчатых крыльев 13.
Путевая устойчивость аппарата обеспечена двухкилевым вертикальным оперением 6, смещающим боковой фокус за центр масс (ц.м.) аппарата, в результате чего обеспечивается создание стабилизирующего путевого момента. В заявляемом аппарате путевая устойчивость несколько завышена для сокращения времени устранения его скольжения, весьма опасного для аппарата вертикального взлета и посадки.
В горизонтальном полете аппарата при отклонении рулей высоты 9 создаются управляющие моменты, которые, преодолевая сопротивление инерционных демпфирующих и стабилизирующих моментов, вращают аппарат вокруг оси Z. В соответствии с этим осуществляется продольная управляемость. В штатном полете рули высоты 9, состоящие из двух половин, работают синхронно, как единая плоскость. В аварийной ситуации в случае отказа элерон-лопаток 25 половинки рулей высоты 9 работают дифференциально, обеспечивая управление по крену до момента аварийной посадки.
При отклонении рулей направления 8 создается управляющий момент, изменяющий угол скольжения аппарата, т.е. осуществляется путевая управляемость. Изменение угла скольжения вызывает несимметричное обтекание аппарата, что при наличии поперечной устойчивости, обеспеченной только гироскопическими моментами подъемно-маршевых вентиляторов 2, приводит к появлению некоторого момента, нарушающего поперечное равновесие аппарата. Поэтому одновременно с путевой должна быть обеспечена поперечная управляемость. При координированном отклонении элерон-лопаток 25 и рулей направления 8 эволюции аппарата могут выполняться без скольжения.
В заявляемом аппарате несколько завышенные площади вертикального оперения 6, а сам аппарат подвержен воздействию гироскопических моментов подъемно-маршевых вентиляторов 2, размещенных в крыле малого удлинения 1, что способствует очень незначительному действию момента, нарушающего поперечное равновесие аппарата. При этом сам аппарат обретает свойства совершать эволюции без скольжения без дополнительных команд системы управления по обеспечению координированного отклонения элерон-лопаток 25 и рулей направления 8. Обратный переходный режим от горизонтального полета к режиму висения и вертикальной посадке выполняется аппаратом следующим образом (Фиг.8). Аппарат переводится в режим торможения путем плавного поворота подъемно-маршевых вентиляторов 18 на угол, обеспечивающий вертикальное направление вектора тяги.
Одновременно дифференциальным изменением тяг пар вентиляторов 2 и 18 аппарат переводится на увеличенный угол атаки, позволяющий осуществить аэродинамическое торможение крылом малого удлинения 1, при этом направляющие лопатки 4 подъемно-маршевых вентиляторов 2 отклоняют поток 27, получая силу тяги, направленную под углом против направления полета аппарата. Во время процесса торможения выпускается пневмоамортизатор 30 и наполняется газообразной средой. После уменьшения поступательной скорости аппарата он переводится на малый угол атаки, а направляющие лопатки 4 вентилятора 2 отклоняют поток 27 в вертикальном направлении. Аппарат зависает над местом посадки и плавно за счет уменьшения тяг пар вентиляторов 2 и 18 переходит в режим вертикального снижения до касания пневмоамортизатором 30 земной (водной) поверхности.
При касании пневмоамортизатора 30 земной (водной) поверхности и дальнейшем его обжатии происходит демпфирование вертикальной скорости аппарата, превращение большей части его кинетической энергии в тепло, а также передача в виде распределенной нагрузки оставшейся части кинетической энергии на элементы конструкции крыла малого удлинения 1. Пневмоамортизатор 30 с достаточно большой площадью его контакта с поверхностью земли, льда, снега, песка, заболоченной местности позволяет обеспечить мягкую посадку с малой вертикальной скоростью. Пневмоамортизатор 30 наделен свойствами копирования земной поверхности в месте его контакта с ней при посадке. Это обеспечивается заполнением его секций газообразной средой (например, воздухом) под разным давлением, когда секция над выступом земной поверхности имеет меньше давление, чем секция над впадиной. Такой процесс обеспечивается по сигналам специальных датчиков, вмонтированных в нижнее основание 31, и осуществляется подсистемой 57 от бортового процессора 43, обеспечивающего подачу и регулирование давления воздуха в секциях пневмоамортизатора 30, например, дренажными клапанами.
Незадолго до полного срабатывания (обжатия) пневмоамортизатора 30 в контакт с земной (водной) поверхностью вступает лыжное шасси 33, выполненное в виде надувной трубчатой конструкции с более жесткими параметрами демпфирования, чем пневмоамортизатор 30. Внешняя часть лыжного шасси 33 снабжена специальным покрытием, обеспечивающим склольжение при наличии составляющей горизонтальной скорости приземления аппарата, необходимой для перемещения аппарата по земле при выполнении некоторых операций в условиях его применения.
По завершении вертикального снижения и обжатия пневмоамортизатора 30, а также лыжного шасси 33 масса летательного аппарата полностью воспринимается лыжным шасси 33, что является сигналом для уборки пневмоамортизатора 30 в виде пакета 29 в нишу 28 с последующим закрытием ниши 28 нижним основанием 31. Нижнее основание 31 под воздействием внешних нагрузок обладает способностью деформироваться, копируя поверхность, на которую опирается. Оно выполнено из композитных материалов типа кевлара и его нижняя поверхность покрыта антифрикционным составом (пленкой) 32 на основе, например, фторопласта. Уборка пневмоамортизатора 30 осуществляется подсистемой управления пневмоамортизатором 57, которая работает в режиме вакуумирования при уборке пневмоамортизатора 30 или в режиме нагнетания при выпуске его и управляется бортовым процессором 43.
Экономичный горизонтальный полет заявляемого аппарата над экраном осуществляется как полет, использующий комбинацию статического и динамического нагнетания воздуха в пространство между нижней поверхностью крыла 1 и земной или водной поверхностью (экраном) (Фиг.6).
Полет выполняется следующим образом. Под действием силы тяги пары передних вентиляторов 2, направляющие лопатки 4 которых переведены в положение вертикального взлета подсистемой 55, и пары хвостовых вентиляторов 18, переведенных также в положение вертикального взлета подсистемой 56, аппарат на взлетном режиме работы вентиляторов 2, 18 отрывается от земли (воды) и набирает высоту, примерно равную хорде крыла 1. Затем отклонением направляющих лопаток 4 и хвостовых вентиляторов 18 в тяговых кольцах 19 на некоторый угол аппарат разгоняется в горизонтальном направлении, а образующаяся при этом комбинированная воздушная подушка между аппаратом и экраном удерживает его на некоторой высоте, позволяя уменьшить мощность подъемно-маршевых вентиляторов 2, 18 для совершения такого горизонтального полета. Скорость, угловые ускорения, угловые отклонения и высота полета при этом отслеживаются датчиками (38; 39; 40; 41), и их сигналы подаются непосредственно в бортовой процессор 43, где они обрабатываются в соответствии с заданными синергетическими алгоритмами управления полетом аппарата над экраном и подаются на подсистемы автоматизированного управления 44, 45 турбогенераторами 61, 62; подсистемы управления 46, 47, 48, 49 электроприводами 63, 64, 65, 66 вентиляторов 2, 18; подсистемы управления 50 рулями направления 8; подсистемы управления 51 рулями высоты 9; подсистемы управления 52 элерон-лопатками 25; подсистему управления 54 решетчатыми крыльями 13. Такая стратегия управления аппаратом в автоматическом режиме, адекватная воздействию внешних возмущающих факторов, позволит обеспечить координирующее управление с учетом естественных свойств летательного аппарата, как нелинейного объекта механической природы (Колесников А.А. «Синергетическая теория управления», М., Энергоатомиздат, 1994 г.).
В некоторых исключительных случаях взлет, набор высоты, горизонтальный полет, торможение, зависание, посадка и полет над экраном могут выполняться в режиме ручного управления аппаратом. Этот процесс обеспечивается обычными командными органами управления (ручка управления, педали, органы управления общим шагом вентиляторов и т.д.) из кабины экипажа 10 через блоки команд ручного управления 60 и блоки сравнения команд 59, препятствующие подаче ложных команд или команд, противопоказанных аэродинамическим и летно-техническим возможностям аппарата. В целом экономичный горизонтальный полет обеспечивается в штатном режиме процессором 43 через подсистему обеспечения экономичного горизонтального полета 53 на основе программ полета, реализуемых через блок ввода программ 58.
Во всех конфигурациях полета заявляемого аппарата взлет, набор высоты, горизонтальный полет, торможение, зависание, посадка, полет над экраном и т.д. используется автоматический режим полета в соответствии с программируемыми синергетическими алгоритмами управления, вводимыми через блок ввода программ 58 и реализуемыми в виде управляющих воздействий процессора 43 в точном соответствии с выбранными законами управления аппаратом.
Энергоустановка аппарата, включающая в себя турбогенераторы 61, 62, электроприводы воздушных винтов 63, 64, 65, 66, а также аппаратуру управления, распределения и коммутации электроэнергии 67 посредством процессора 43, обеспечена возможность уменьшения потребляемой электроэнергии и ее оптимального потребления в соответствии с заданными синергетическими алгоритмами управления полетом аппарата.
Легкий многорежимный летательный аппарат может быть изготовлен на небольших производственных площадях с использованием современных материалов и технологий.
При реализации изобретения могут использоваться различные конструктивные исполнения приводов, направляющих лопаток, конструктивные решения набора управляемых решетчатых крыльев, несущих аэродинамических поверхностей, устройств изменения общего шага лопастей воздушных винтов, приводов и самих элерон-лопаток, формообразования диффузорных каналов и их протяженности, а также пневмоамортизатора и газонаполненных лыжных шасси, отличающихся от описанных в данной заявке и приведенных на чертежах, иллюстрирующих изобретение, без отхода от идеологии и рамок настоящего изобретения, определяемых объемом притязаний, изложенных в формуле изобретения.
Таким образом, создана концепция летательного аппарата, имеющего повышенную безопасность, надежность и эффективность в условиях турбулентной атмосферы, в том числе обладающего необходимой маневренностью и широким диапазоном скоростей полета вплоть до зависания аппарата в воздухе и вертикальной посадки. Летательному аппарату приданы свойства, обеспечивающие его полет на экранном режиме и обеспечивающие его вертикальную посадку на водную поверхность. Сокращена степень влияния аппарата на окружающую среду.
Изготовлена летающая модель для отработки силовых установок, исследования динамики полета при вертикальном взлете и посадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2518143C2 |
| АВИАЦИОННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ СПАСАТЕЛЬНЫХ РАБОТ | 2008 |
|
RU2381959C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-КОНВЕРТОПЛАН-АМФИБИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312795C2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2422309C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1999 |
|
RU2162809C2 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ МУХАМЕДОВА НА ПРЫЖКОВОМ ШАССИ | 2011 |
|
RU2497721C2 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| УНИВЕРСАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2004 |
|
RU2272751C1 |
Изобретение относится к летательным аппаратам вертикального взлета и посадки. Летательный аппарат содержит фюзеляж с подъемно-маршевыми вентиляторами, кабину, П-образное хвостовое оперение и газонаполненое лыжное шасси с адаптивным пневмоамортизатором. Фюзеляж выполнен в виде аэродинамического крыла малого удлинения, над верхней хвостовой частью которого размещены управляемые решетчатые крылья, ограниченные по концевым участкам вертикальным хвостовым оперением, между плоскостями которого за решеткой крыльев установлены управляемые поворотные подъемно-маршевые вентиляторы в кольцах. На нижней поверхности крыла выполнены для подъемно-маршевых вентиляторов диффузорные каналы с управляемыми элерон-лопатками. Управление аппаратом ручное и автоматическое в соответствии с синергетическими законами единства процессов адаптации и управления. Изобретение направлено на повышение безопасности, надежности и эффективности управления в условиях турбулентной атмосферы. 15 ил.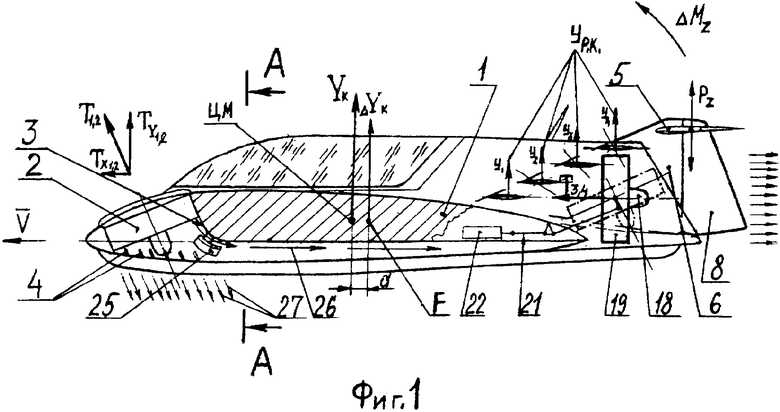
Легкий многорежимный летательный аппарат, содержащий плоский фюзеляж с подъемным и подъемно-маршевыми вентиляторами в кольцевых каналах, кабину экипажа на его верхней поверхности и П-образное хвостовое оперение, отличающийся тем, что он снабжен четным количеством передних подъемно-маршевых вентиляторов в каналах и управляемых хвостовых поворотных подъемно-маршевых вентиляторов в кольцах, а плоский фюзеляж выполнен в форме аэродинамического крыла малого удлинения, над верхней хвостовой частью которого размещен набор управляемых решетчатых крыльев, ограниченных по концевым участкам вертикальным оперением, между плоскостями которого за решетчатыми крыльями установлены управляемые хвостовые поворотные подъемно-маршевые вентиляторы в кольцах, причем на нижней поверхности крыла выполнены осепараллельные диффузорные каналы, а каналы передних подъемно-маршевых вентиляторов сообщены с диффузорными каналами и снабжены управляемыми элерон-лопатками, при этом управление аппаратом, кроме ручного, осуществляется автоматически в соответствии с реализуемыми синергетическими законами единства процессов адаптации и управления, а взлетно-посадочные устройства выполнены в виде комбинированного газонаполненного лыжного шасси и адаптивного пневмоамортизатора с возможностью его уборки и размещением внутри крыла.
| Jane's Defence Weekly, 16/VII 2003, N2, v.40, p.10 | |||
| US 4071207 A, 31.01.1978 | |||
| US 3614030 A, 19.10.1971 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1991 |
|
RU2016781C1 |

