Предлагаемое изобретение относится к области авиационной техники, а именно к пилотируемым и беспилотным летательным аппаратам вертикального взлета и посадки конвертируемого типа.
В числе основных проблем при создании летательных аппаратов вертикального взлета и посадки (ЛА ВВП) отмечаются следующие: проблемы обеспечения высокой тяговооруженности ЛА, надежности работы силовой установки, эффективной управляемости аппаратом на всех режимах полета, а также удовлетворение требованиям заданных летно-технических характеристик ЛА ВВП. Известны несколько подходов к решению данных проблем. Так, первые образцы СВВП были построены по схеме, предусматривающей вертикальное положение фюзеляжа на взлете и посадке, но в последние десятилетия такая схема для пилотируемых СВВП не применяется, не исключая своего применения для беспилотных летательных аппаратов (БЛА) различного назначения.
Примером такого технического решения является СВВП Конвэр XFV-1 (США), который имел турбовинтовую силовую установку, размещенную в фюзеляже с соосными воздушными винтами противоположного вращения большого диаметра, при этом нагрузка на сметаемую винтами поверхность достигала 360 кг/м2. Дельтовидное крыло, надфюзеляжное и подфюзеляжное вертикальное оперение большой площади прикреплены крестообразно к фюзеляжу, причем по концам крыла и оперения в обтекателях были установлены опоры, обеспечивающие вертикальное положение аппарата на стоянке, во время взлета и посадки. Горизонтального оперения СВВП XFV-1 не имел. Аппарат взлетал вертикально и постепенно, по мере набора высоты по дугообразной траектории переходил к горизонтальному полету. Посадку аппарат совершал в обратном порядке. Меняя тягу воздушных винтов и углы отклонения рулевых поверхностей, находящихся в воздушном потоке от винтов, аппарат из горизонтального полета делал "горку", а затем постепенно садился на "хвост", плавно уменьшая вертикальную скорость снижения, пока он не зависал и его четыре опоры не касались поверхности аэродрома [Ф.П. Курочкин. Основы проектирования самолетов с вертикальным взлетом и посадкой. М.: Машиностроение, 1970, с.13, 14].
Известны ДПЛА (Дистанционно-пилотируемые летательные аппараты) четырехкрылой схемы, содержащие двигатель, вертикальное оперение, выполненные в Московском авиационном институте (МАИ), например ДПЛА "602-03" в 1978 г., ДПЛА "602-05" в 1981 г. и т.д. [Ю.В. Макаров. Летательные аппараты МАИ. М.: Изд-во МАИ, 1994, с.212-214, рис.143в и 144а]. Недостатками такого технического решения являются: применение одинарной силовой установки и тяжелонагруженных воздушных винтов, которые при одной и той же полетной массе аппарата требуют почти вдвое большую мощность двигателя по сравнению с аппаратом, имеющим легконагруженные винты. Такая схема аппарата недостаточно гарантирует безопасность взлета и посадки в случае отказа двигателя, когда еще не закончен переходной режим, так как большая нагрузка на сметаемую винтом поверхность обуславливает и большую скорость установившегося вертикального снижения аппарата. Кроме того, несущие и стабилизирующие поверхности таких аппаратов имеют значительную площадь, подверженную турбулентным воздействиям атмосферы в момент взлета и посадки, когда их скорость не намного отлична от нулевой.
Известен также летательный аппарат Х-4, который был спроектирован и построен в МАИ. Фюзеляж аппарата выполнен в виде открытого поста управления, расположенного в точке пересечения трех трубчатых балок, установленных под углом 120° друг к другу. По концам балок размещались три блока поршневых двигателей. Каждый блок имел общий вал, связанный редуктором с коленчатым валом каждого из моторов. На вал каждого из блоков устанавливался воздушный винт. Нижняя часть каждого из блоков была снабжена пневматической опорой трехстоечного шасси. Аппарат управлялся посредством изменения вектора тяги каждого винта с помощью ручки управления и педалей [Ю.В. Макаров. Летательные аппараты МАИ. М.: Изд-во МАИ, 1994, с.153, 154]. Данное техническое решение содержит в себе следующие недостатки: неуравновешенность реактивного момента от третьего блока двигателей с воздушным винтом, а также ограничения по скорости горизонтального полета по причине затенения третьего воздушного винта креслом с находящимся в нем пилотом, что отрицательно влияет как на управляемость, так и на балансировку аппарата в целом.
Известен также летательный аппарат Curtiss Wright VZ-7 (США), содержащий фюзеляж, выполненный в виде рамы, на которой размещен открытый пост управления и кресло пилота. В передней части рамы размещены справа и слева угловые редукторы, на валах которых закреплены с возможностью их вращения воздушные винты. В хвостовой части рамы также размещены угловые редукторы с воздушными винтами. Воздушные винты посредством редукторов и валов кинематически связаны с силовой установкой, размещенной в центре рамы (фюзеляжа). Такая кинематическая схема позволяет обеспечивать синхронизацию оборотов всех четырех винтов, но за счет увеличения массы аппарата. Управление таким аппаратом обеспечивается путем дифференциального изменения тяги передних и задних винтов пропорционально их шагу, задаваемому командными органами управления [см. всемирную сеть Internet file: //E:\TMP\Curtiss-Wright % 20 VZ-7.htm]. Недостаточная безопасность полета аппарата, при наличии одной силовой установки в совокупности с несколькими редукторами, приводили к большим потерям мощности, передаваемой на воздушные винты, что в итоге выразилось в очень низкой скорости полета аппарата и чрезвычайно малом потолке, который достигался аппаратом. Кроме того, такая кинематическая схема раздачи мощности на воздушные винты аппарата требует значительных затрат на обслуживание.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является летательный аппарат-конвертоплан, содержащий вертикально расположенный фюзеляж с кабиной экипажа и грузовыми отсеками, вертикально расположенные силовые установки, которые оснащены управляемыми воздушными винтами и размещены в мотогондолах, содержащих стойки шасси, прикреплены к фюзеляжу посредством крестообразных крыльев малого удлинения с поверхностями управления, по их общей оси пересечения [Ю.В. Макаров. Летательные аппараты МАИ. М.: Изд-во МАИ, 1994, с.114, 115]. В данном техническом решении весь аэродинамический комплекс летательного аппарата представляет собой крестообразное крыло, по концам которого размещены силовые установки с воздушными винтами. Такой подход позволяет увеличить скорость обтекания всех несущих поверхностей на всех режимах полета, что ведет к повышению эффективности управления аппаратом, а также увеличению скорости его горизонтального полета за счет замены косой обдувки воздушных винтов на осевую. Недостатком данного летательного аппарата является неэффективное использование одиночных аэродинамических поверхностей как при вертикальном взлете и посадке в условиях турбулентной атмосферы, так и в горизонтальном полете, когда необходимо создавать перераспределение давлений воздуха по профилю крыльев для обеспечения необходимой балансировки аппарата и создания управляющих моментов при небольшом плече их действия. Данное обстоятельство, в конечном итоге, ведет к снижению подъемной силы крыла аппарата. По сути аэродинамическая схема этого летательного аппарата обладает теми же недостатками, что и схема "летающее крыло".
Задачей, на решение которой направлено предлагаемое изобретение, является создание летательного аппарата, имеющего повышенную эффективность на режимах взлета и посадки, особенно в условиях турбулентной атмосферы, в том числе обладающего высокой скороподъемностью при меньших затратах мощности силовых установок. Другой задачей изобретения является создание летательного аппарата, обеспечивающего высокую маневренность и широкий диапазон изменения скорости полета, вплоть до зависания аппарата в воздухе. Третьей задачей изобретения является необходимость придания аппарату амфибийных свойств, обеспечивающих возможность его эксплуатации как на суше, так и в морских условиях. Четвертой задачей изобретения является повышение надежности аппарата и сокращение степени его влияния на окружающую среду.
Поставленные технические задачи решаются в результате того, что летательный аппарат-конвертоплан, содержащий вертикально расположенный фюзеляж с кабиной экипажа и грузовыми отсеками, вертикально расположенные силовые установки, которые оснащены управляемыми воздушными винтами и размещены в мотогондолах, содержащих стойки шасси, прикреплены к фюзеляжу посредством крестообразных крыльев малого удлинения по их общей оси пересечения, в соответствии с изобретением выполнен с попарно разнесенными в каждой из пересекающихся вертикальных плоскостей звездообразными, с четным количеством лучей, крыльями, по концам которых размещены силовые установки в мотогондолах, образуя в каждой из пересекающихся плоскостей жесткую конструкцию, а каждое из крыльев снабжено адаптивными поверхностями управления с возможностью их активации, согласно требуемым режимам работы силовых установок и противодействию внешним возмущающим факторам, в соответствии с реализуемыми объективными синергетическими законами единства процессов адаптации и управления, при этом нижние части мотогондол оснащены выпускными водоизмещающими взлетно-посадочными средствами изменяемого объема с возможностью уборки во внутренние полости каждой из мотогондол.
Технический результат по второму варианту достигается тем, что известный летательный аппарат оснащен четным количеством съемных аэродинамических крыльев оптимального удлинения, а их консоли закреплены на фюзеляже между плоскостями звездообразных крыльев, образуя различные аэродинамические компоновки.
Технический результат при осуществлении изобретения по третьему варианту достигается тем, что каждая из силовых установок содержит не менее двух соосно-независимых приводов с воздушными винтами в тяговых кольцах.
Кроме того, каждое из водоизмещающих взлетно-посадочных средств может быть выполнено как в виде комбинации складывающегося гофрированного цилиндра и сферы, при этом внутренняя полость гофрированного цилиндра разделена на две полости эластичной поперечной перегородкой с редукционным клапаном, а оболочка сферы имеет возможность уборки и размещения внутри конечной полости цилиндра, торец которого снабжен поворотными лепестками обтекателя, так и каждое из водоизмещающих взлетно-посадочных средств может быть выполнено с расщепляемыми створками, во внутренних полостях которых закреплены надувные баллонеты.
Сущность предлагаемого изобретения заключается в том, чтобы на всех режимах полета в полной мере использовать преимущества классической схемы обтекания несущих аэродинамических поверхностей более скоростным управляемым воздушным потоком, оптимально использовать мощность силовых установок, работающих с адаптивными поверхностями управления по единым для них законам, а также обеспечить возможность взлета-посадки аппарата с водной поверхности с возможностью уборки и выпуска взлетно-посадочных средств. Повышение эффективности аппарата на всех режимах полета, в том числе при полете в условиях турбулентной атмосферы, достигается тем, что его звездообразные крылья (частным случаем которых являются крестообразные крылья), попарно разнесенные в вертикальных пересекающихся плоскостях, в каждой из них формируют аэродинамическую схему "тандем", являющуюся наиболее эффективной с точки зрения распределения аэродинамических сил, обеспечивающих полет аппарата в горизонтальной конфигурации и моментов для управления им при взлете, посадке, зависании, а также в горизонтальном полете. Силовые установки с воздушными винтами, находящиеся перед каждой из пары крыльев, генерируют воздушный поток, обдувающий с увеличенной скоростью переднюю и кормовую несущие аэродинамические поверхности, которые в отличие от несущих поверхностей, выполненных по схеме "летающее крыло", имеют большее значение эффективного удлинения и плеча действия управляющих сил и моментов, а также меньшую относительную толщину при одинаковом размахе, ограниченном силовыми установками. Данное решение позволит уменьшить значение составляющих полного аэродинамического сопротивления каждого из крыльев, что и приводит, в конечном счете, к увеличению скорости обтекания поверхностей воздушным потоком. Наличие четного количества лучей звездообразных крыльев, по концам которых размещены силовые установки, обеспечивает уравновешенность реактивного момента от их работы и симметрию тяг. Снабжение каждого из крыльев адаптивными поверхностями управления позволяет получать оптимальные значения аэродинамического качества профиля на всех режимах полета летательного аппарата и обеспечивать необходимую степень его управляемости с минимально необходимыми углами отклонения поверхностей управления.
Активация адаптивных поверхностей управления согласно требуемым режимам работы силовых установок позволит иметь оптимальные углы атаки крыльев, омываемых скоростными потоками воздуха от воздушных винтов и получать при этом минимальные потери тяги каждого из воздушных винтов при вертикальном взлете и посадке. Активация адаптивных поверхностей управления, адекватная воздействию внешних возмущающих факторов совместно с автоматическим изменением режимов работы силовых установок, в соответствии с реализуемыми синергетическими законами управления, позволит обеспечивать координирующее управление с учетом естественных свойств летательного аппарата как нелинейного объекта механической природы. При этом будут решаться задачи ведения аппарата по заданному маршруту (траектории полета) с контролем его положения по данным, обеспечивающим также его автоматический взлет, посадку и зависание на заданной высоте. Для обеспечения такой стратегии управления аппаратом все переменные параметров его состояния в полученных базовых законах управления его движением приняты наблюдаемыми и при использовании адаптивных поверхностей управления со специальной адаптивной системой управления для работы на критических режимах будут обеспечивать автоматический вывод аппарата из критических режимов полета и предотвращать его попадание в такие режимы [А.А. Колесников. Синергетическая теория управления. М.: Энергоатомиздат, 1994].
Оснащение нижних частей мотогондол водоизмещающими взлетно-посадочными средствами с возможностью их уборки внутрь мотогондол в полетной конфигурации и выпуском для обеспечения посадки и удержания аппарата на плаву придает аппарату амфибийные свойства, что расширяет сферу его применения, в том числе в жестких морских условиях, а также обеспечивает большую гарантию безаварийной посадки на земную поверхность во внештатной ситуации.
Наличие четного количества съемных аэродинамических крыльев, неограниченного силовыми установками размаха, позволяет трансформировать данный летательный аппарат в конструкцию, выполненную по различным аэродинамическим схемам: "классическую", "тандем", "утка" и т.д., что позволяет придавать аппарату новые свойства, обуславливаемые более высокими аэродинамическими качествами съемных крыльев. Например, при перегоне аппарата из одной зоны действия в другую, когда время горизонтального полета многократно превышает время его нахождения во взлетно-посадочной конфигурации или время его зависания над зонами поисковых операций, мониторинга и т.д. Оснащение аппарата такими крыльями позволяет ему там, где это необходимо и возможно, производить старт с наклонных пусковых устройств, обеспечивающий повышение дальности и продолжительности полета, сравнимые с дальностями и продолжительностями полета обычных крылатых летательных аппаратов самолетного типа.
Оснащение летательного аппарата соосно-независимыми приводами с воздушными винтами в тяговых кольцах повышает надежность работы всего двигательно-движительного комплекса в целом за счет его резервирования, а также обеспечивает защиту воздушных винтов от внешнего воздействия, повышает их эффективность работы и улучшает шумовые характеристики.
Выполнение водоизмещающих взлетно-посадочных средств в виде комбинации складывающегося гофрированного цилиндра и сферы, надуваемых воздухом во время посадки на воду или взлета с воды, позволяет обеспечивать выпуск и уборку этих средств без применения сложных механических систем. Выпуск таких взлетно-посадочных средств производится избыточным давлением воздуха, а уборка - вакуумированием от одного и того же компрессора с эжектором.
Выполнение водоизмещающих взлетно-посадочных средств в виде расщепляемых створок нижних частей мотогондол, во внутренних полостях которых закреплены надувные баллонеты, позволяет достаточно просто и надежно обеспечивать плавучесть аппарата, а также обеспечивать возможность поглощения удара при вертикальной посадке на земную поверхность во внештатной ситуации.
Предлагаемое изобретение поясняется чертежами, где на фиг.1 изображен летательный аппарат по варианту 1 в режиме вертикального взлета и посадки с суши, вид спереди;
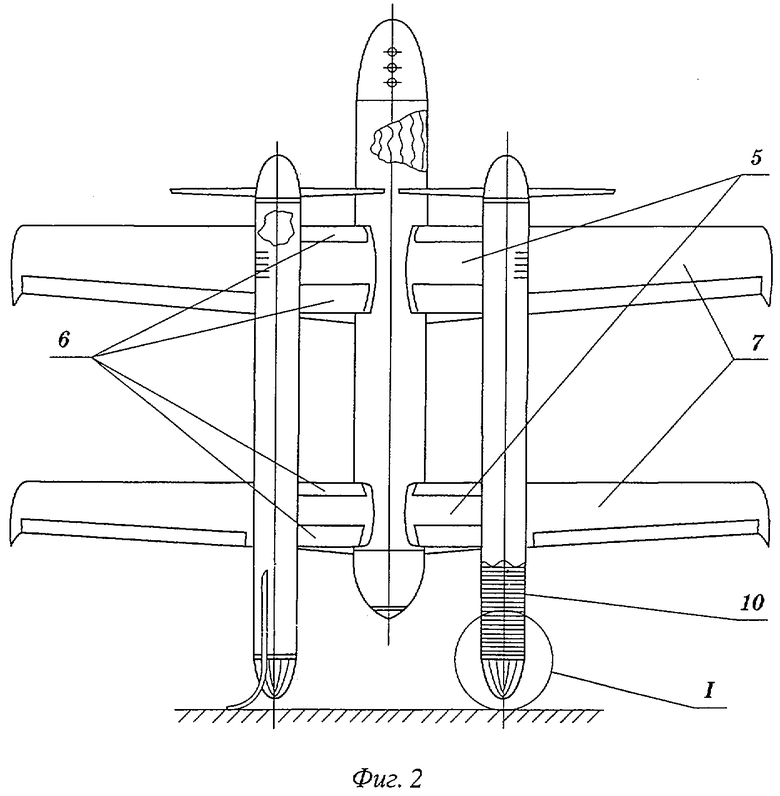
на фиг.2 - изображен летательный аппарат по варианту 2 в режиме вертикального взлета и посадки с суши, вид спереди;
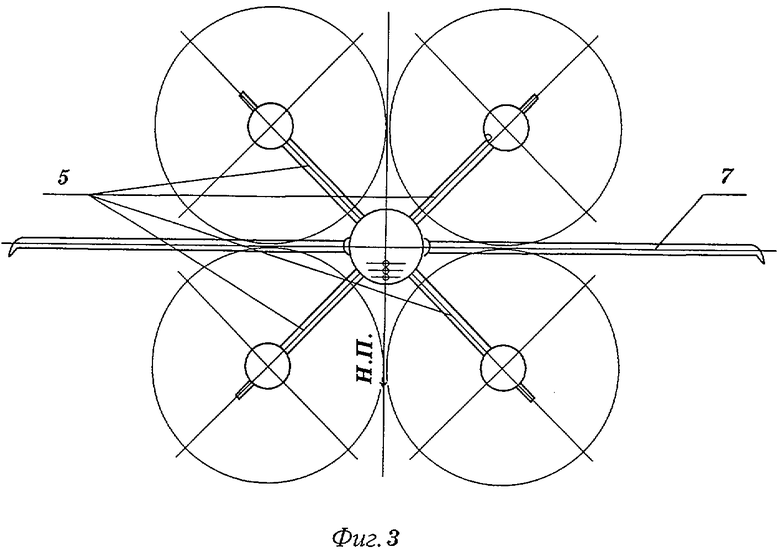
на фиг.3 - изображен летательный аппарат по варианту 2, вид сверху;
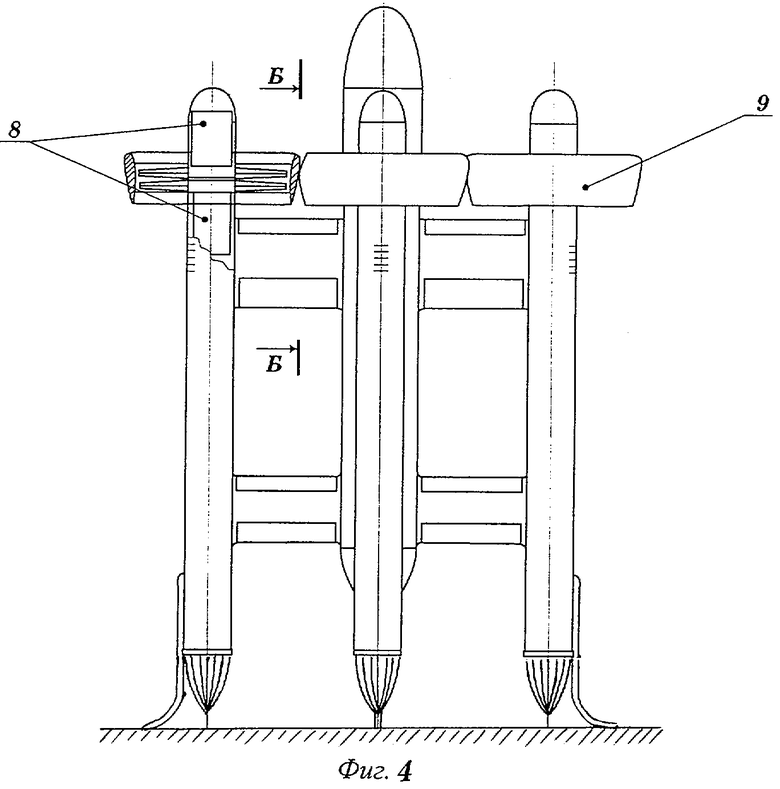
на фиг.4 - изображен летательный аппарат по варианту 3 в режиме вертикального взлета и посадки с суши, вид спереди;
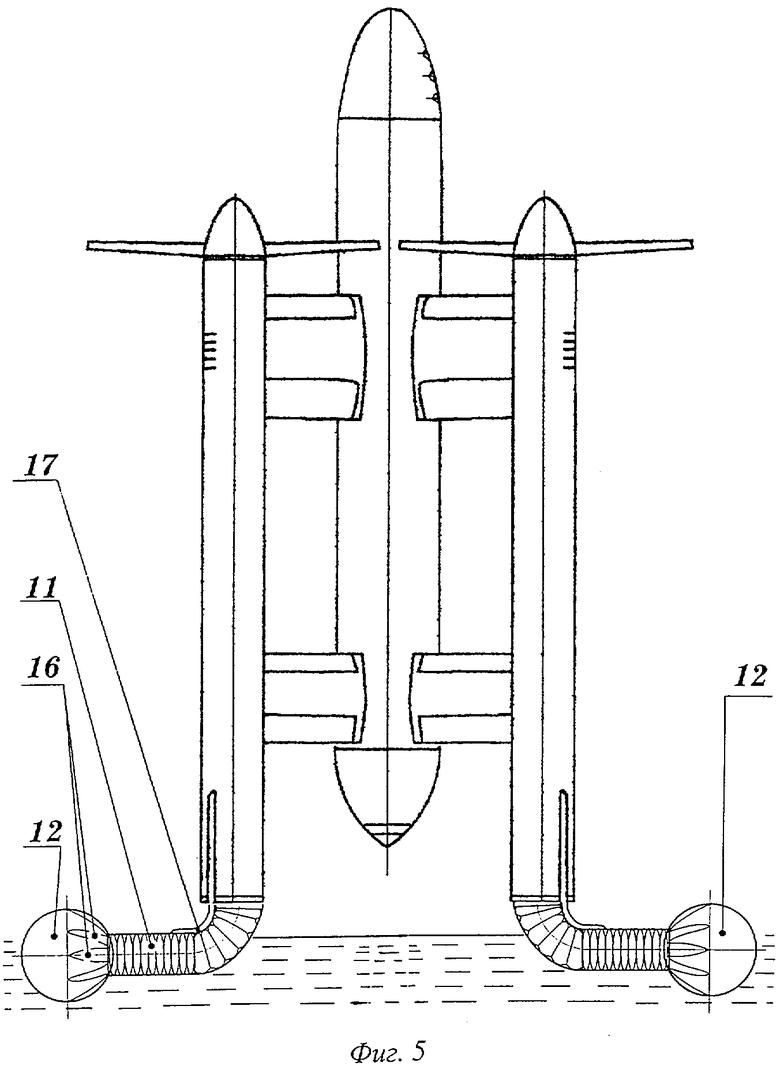
на фиг.5 - изображен вид сбоку на летательный аппарат на водной поверхности с выпущенными взлетно-посадочными устройствами;
на фиг.6 - сечение адаптивного крыла;
на фиг.7 - узел взлетно-посадочных устройств;
на фиг.8 - летательный аппарат на водной поверхности с обеспечением плавучести надувными баллонетами;
на фиг.9 - летательный аппарат с надувными баллонетами, вид сверху;
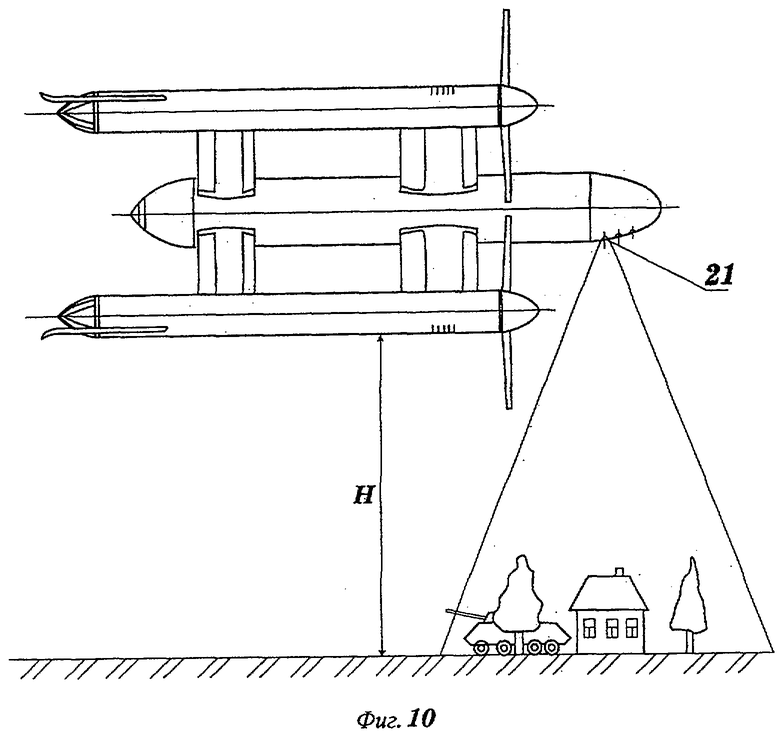
на фиг.10 - вид сбоку на аппарат в горизонтальном полете на высоте Н;
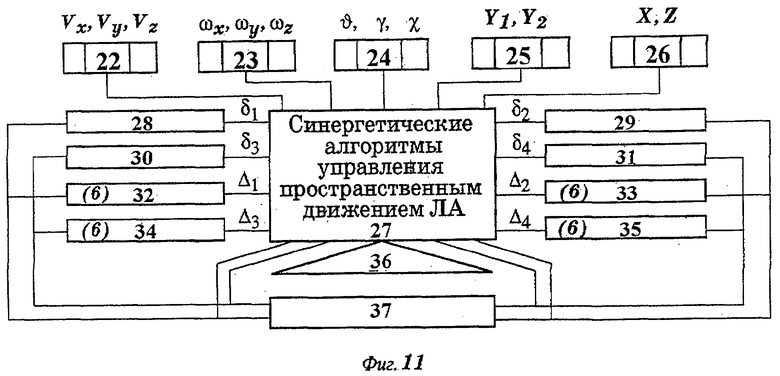
на фиг.11 - функциональная схема системы управления аппаратом;
на фото - летающая модель ЛА.
Стрелка Н.П. указывает направление полета.
Предлагаемый летательный аппарат по первому варианту конструктивного решения содержит фюзеляж 1, силовые установки 2 с воздушными винтами 3 в мотогондолах 4, которые прикреплены к концам попарно разнесенных в пересекающихся вертикальных плоскостях звездообразных крыльев 5, образуя в каждой из плоскостей замкнутую жесткую конструкцию. Каждое из крыльев 5 снабжено адаптивными поверхностями управления 6.
По второму варианту конструктивного решения к фюзеляжу 1 аппарата, между плоскостями звездообразных крыльев 5, крепятся съемные аэродинамические крылья 7.
По третьему варианту конструктивного решения каждая из силовых установок 2 содержит в себе по два соосно-независимых привода 8 в тяговых кольцах 9.
По любому из трех вариантов конструктивного решения нижние части мотогондол 4 оснащены выпускными водоизмещающими взлетно-посадочными средствами 10, каждое из которых может быть выполнено в виде комбинации складывающегося по длине гофрированного цилиндра 11 и эластичной складывающейся оболочки сферы 12. Гофрированный цилиндр 11 разделен внутри на две полости эластичной перегородкой 13, в которую вмонтирован редукционный клапан 14. Конечная полость цилиндра 11 ограничена кольцевым фланцем 15, к которому крепятся поворотные лепестки обтекателя 16. Нижние части мотогондол 4 оснащены ударогасящими опорами 17, придающими заданную форму выпускным водоизмещающим взлетно-посадочным средствам 10 при совершении посадки аппарата на водную поверхность.
По любому из трех вариантов конструктивного решения каждое из водоизмещающих взлетно-посадочных средств 10, обеспечивающих взлет и посадку аппарата с водной поверхности, может быть выполнено с расщепляемыми створками 18, во внутренних полостях 19 которых закреплены надувные баллонеты 20.
В носовой и хвостовой частях фюзеляжа 1 размещена целевая нагрузка 21.
Автоматизированная система управления аппаратом состоит из:
- датчиков скорости полета 22 (Vx, Vy, Vz);
- датчиков угловых скоростей 23 (ωx, ωy, ωz);
- датчиков угловых отклонений 24 ( , γ, χ);
, γ, χ);
- датчиков высоты полета 25 (Y1, Y2);
- датчиков позиционирования (GPS) 26 (Х, Z);
- бортового процессора 27 (БСАУ);
- подсистем автоматизированного управления силовыми установками 28, 29, 30, 31 (δ1, δ2, δ3, δ4);
- адаптивных аэродинамических органов управления ЛА 32, 33, 34, 35 (Δ1, Δ2, Δ3, Δ4);
- подсистемы ввода информации 36 (заданный маршрут, профиль полета, базовые законы управления);
- командного блока управления ЛА 37.
Летательный аппарат-конвертоплан-амфибия работает следующим образом.
Вертикальный взлет аппарата с суши выполняется при вертикальном положении фюзеляжа 1 и силовых установок 2. Силовые установки 2 вращают управляемые воздушные винты 3, которые отбрасывают воздушный поток вниз и обеспечивают тем самым отрыв аппарата от поверхности суши. Аппарат зависает на некотором расстоянии от поверхности. На режиме висения в отсутствие возмущений и при их наличии аппарат находится в состоянии устойчивого равновесия, обеспечиваемого совместной работой обдуваемых воздушным потоком от винтов 3 разнесенных по вертикали крыльев 5, снабженных адаптивными управляющими аэродинамическими поверхностями 6, и силовых установок 2.
Стабилизация аппарата обеспечивается реализацией заданных синергетических алгоритмов управления пространственным движением аппарата. Управление - путем изменения режимов работы каждой из силовых установок 2 совместно с отклонением управляющих поверхностей 6 таким образом, чтобы возникал требуемый управляющий момент, а суммарная тяга силовых установок при этом не изменялась. Сигналы с датчиков 22 (Vx, Vy, Vz), датчиков 23 (ωx, ωy, ωz), датчиков 24 (, γ, χ), датчиков 25 (Y1, Y2), датчиков 26 (X, Z), характеризующих положение и состояние аппарата в пространстве, подаются в бортовой процессор 27, где обрабатываются в соответствии с заданными синергетическими алгоритмами управления пространственным движением аппарата и подаются на подсистемы автоматизированного управления силовыми установками 28 (δ1), 29 (δ2), 30 (δ3), 31 (δ4) и на исполнительные органы адаптивных управляющих поверхностей 32 (Δ1), 33 (Δ2), 34 (Δ3), 35 (Δ4). Продольное управление аппаратом осуществляется путем дифференциального изменения режима работы передних и задних (вид по полету) силовых установок 28, 29 и 30, 31 (δ1, δ2)≠(δ3, δ4) одновременно с отклонением соответствующих управляющих поверхностей 32, 33 и 34, 35 (Δ1, Δ2)≠(Δ3, Δ4). Поперечное - путем дифференциального изменения режима работы силовых установок, расположенных справа и слева 28, 30 и 29, 31 (δ1, δ3)≠(δ2, δ4) и с отклонением соответствующих управляющих поверхностей 32, 34 и 33, 35 (Δ1, Δ3)≠(Δ2, Δ4). Путевое - дифференциальным изменением режима работы накрест расположенных силовых установок 28, 31 и 30, 29 (δ1, δ4)≠(δ3, δ2) с отклонением соответствующих управляющих поверхностей 32, 35 и 34, 33 (Δ1, Δ4)≠(Δ3, Δ2). Адаптивные управляющие аэродинамические поверхности (6) 32, 33, 34, 35 крыльев 5 могут быть выполнены по аналогии с техническим решением, описанным в патенте РФ № 2162428 от 09.07.1998, кл. В64С 33/02, и не будут требовать механических исполнительных устройств.
Подсистема ввода информации 36 позволяет вводить цифровую информацию о заданном профиле, маршруте полета аппарата; законы управления и способы вывода аппарата из критических режимов; программировать реакцию на внешние возмущения. Командный блок управления аппаратом 37 позволяет задавать поведение аппарата в соответствии с изменившейся ситуацией в реальном масштабе времени, в том числе в режиме ручного управления.
При полете аппарата в горизонтальной конфигурации съемные аэродинамические крылья 7 с удлинением, обеспечивающим более высокое аэродинамическое качество, чем вариант аппарата, имеющий только крылья 5, позволяют выполнять ему более длительный горизонтальный полет с меньшей потребной мощностью силовых установок 2, что особенно важно при выполнении длительных операций патрулирования и мониторинга. Управление аппаратом в горизонтальной конфигурации полета по тангажу и крену полностью осуществляется аэродинамическими органами управления (рулями высоты и элеронами), размещенными на крыльях 7 аппарата. Они позволяют обеспечить большую эффективность управления при меньших скоростях полета за счет увеличения плеча действия управляющих сил. Управление по курсу в этом случае обеспечивается адаптивными поверхностями управления 6, размещенными на крыльях 5 в хвостовой (нижней) части аппарата. В целом управление аппаратом в горизонтальном полете осуществляется в соответствии с заданными синергетическими алгоритмами управления.
На аппарате реализована возможность уменьшения потребляемой электроэнергии благодаря его конвертированию - переводу из конфигурации вертикального взлета и посадки, при которой потребление энергии максимально, в конфигурацию горизонтального полета, при котором потребление энергии на борту минимально. Эти процессы обеспечивает бортовая система автоматизированного управления (БСАУ) 27, реализующая заданные синергетические алгоритмы управления пространственным движением аппарата с выполнением задач оптимального потребления энергии.
В летательном аппарате используются силовые установки 2 и соосно-независимые приводы 8, выполненные на основе высокоэффективных бесколлекторных электрических двигателей постоянного тока с магнитными системами из редкоземельных материалов. Наличие нескольких таких электродвигателей позволяет в соответствии с заданием частично группами или даже полностью на определенное время отключать их от системы энергоснабжения или производить электронную регулировку их режима работы для обеспечения экономичного полета без демаскирующих признаков. Такие режимы работы характерны для полета в горизонтальной конфигурации. Размещение воздушных винтов 3 в тяговых кольцах 9 повышает эффективность всего двигательно-движительного комплекса, уменьшая влияние внешних возмущающих факторов, улучшая шумовые характеристики винтов 3 и обеспечивая защиту их от посторонних предметов, что особенно важно при выполнении вертикального взлета и посадки аппарата.
Нижние части мотогондол 4 аппарата снабжены выпускными (убираемыми) водоизмещающими взлетно-посадочными средствами 10. Они представляют собой комбинации из складывающихся по длине гофрированных цилиндров 11 и укладывающихся во внутренние полости цилиндров 11 оболочек сфер 12, которые выполнены из эластичной ткани с синтетическими пропитками, обеспечивающими их герметичность, прочность и возможность длительной эксплуатации в морской среде. Выпуск взлетно-посадочных средств 10 осуществляется избыточным давлением газообразной среды, а уборка - вакуумированием их внутренних полостей. Процесс выпуска и наполнения таких взлетно-посадочных средств 10 происходит следующим образом. Перед посадкой на водную поверхность аппарат вертикально зависает или снижается с очень малой скоростью. В этот период времени подается под избыточным давлением газообразная среда в полости каждого из гофрированных цилиндров 11, которые находятся в сложенном состоянии во внутренних полостях каждой из мотогондол 4. Под действием избыточного давления газообразной среды цилиндр 11 наполняется, увеличивается его длина и он по мере наполнения выходит из внутренней полости мотогондолы 4. Эластичная перегородка 13 с редукционным клапаном 14, делящая полость гофрированного цилиндра 11 на две полости - начальную и конечную, позволяет обеспечить задержку наполнения конечной полости, к которой прикреплена оболочка сферы 12, и дать возможность полностью выпустить гофрированный цилиндр 11 прежде, чем наполнится оболочка сферы 12. Задержку в наполнении обеспечивает редукционный клапан 14, в котором калиброванные отверстия дозировано пропускают газообразную среду в конечную полость цилиндра 11, обеспечивая ее наполнение и наполнение оболочки сферы 12 с отставанием во времени по отношению ко времени наполнения начальной полости цилиндра 11. По мере наполнения оболочки сферы 12 производится раскрытие подпружиненных поворотных лепестков обтекателя 16, размещенных на кольцевом фланце 15.
Гофрированный цилиндр 11, находящийся в зацеплении с ударогасящей опорой 17, скользя по ее поверхности и наполняясь газообразной средой, повторяет ее форму, производя поворот на 90° с необходимым радиусом. Такое формообразование водоизмещающего взлетно-посадочного средства 10 летательного аппарата обеспечивает аппарату плавучесть с необходимыми параметрами его устойчивости на водной поверхности. После вертикального взлета с воды производится уборка взлетно-посадочного средства 10, в процессе которой редукционный клапан 14 позволяет наоборот обеспечить более раннее вакуумирование оболочки сферы 12, затем конечной полости гофрированного цилиндра 11 и, наконец, начальной его полости. Такая последовательность уборки и выпуска водоизмещающего взлетно-посадочного средства изменяемого объема 10 позволяет беспрепятственно осуществлять его размещение после уборки во внутренней полости мотогондолы 4 и осуществлять его выпуск из мотогондолы 4 с необходимым формообразованием.
В заявляемом летательном аппарате могут быть использованы взлетно-посадочные средства в виде надувных баллонетов 20, закрепленных во внутренних полостях 19 расщепляемых створок 18.
Водоизмещающие свойства баллонетов 20 обеспечиваются заполнением оболочки каждого из них газообразной средой под давлением, в результате чего оболочка принимает заданную форму (например, сферы) и увеличивается в объеме, вытесняя определенный объем воды. Групповое расположение таких баллонетов 20 в нижней части аппарата позволяет обеспечивать его плавучесть. В данном техническом решении надувные баллонеты 20 закреплены во внутренних полостях 19 каждой из расщепляющихся створок 18, что позволяет передавать гидростатическую силу выталкивания от баллонетов 20 через створки 18 на нижние части мотогондол 4 и удерживать, таким образом, аппарат на плаву. В результате того что расщепляющиеся створки 18 при их раскрытии на 90° уходят от их центральных осей к периферии, вынося тем самым к периферии и баллонеты 20, обеспечивается горизонтально-групповое расположение надувных баллонетов 20 по водной поверхности, и создается необходимая остойчивость аппарата на плаву.
После взлета аппарата с водной поверхности газообразная среда из баллонетов 20 стравливается, оболочки баллонетов 20 теряют форму, а после вакуумирования каждая из оболочек складывается во внутренние полости створок 18, позволяя тем самым закрыть створки, повернув их на 90°, и обеспечить обтекаемую форму нижним частям мотогондол 4.
Летательный аппарат-конвертоплан-амфибия может быть изготовлен на небольших производственных площадях с использованием современных материалов и технологий. При реализации изобретения могут использоваться различные конструктивные исполнения приводов, адаптивных управляющих поверхностей, несущих аэродинамических поверхностей, устройств изменения общего шага лопастей воздушных винтов, отличающихся от описанных в данной заявке и приведенных на чертежах, иллюстрирующих изобретение, без отхода от идеологии и рамок настоящего изобретения, определяемых объемом притязаний, изложенных в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
| КОНВЕРТОПЛАН | 2016 |
|
RU2635431C1 |
| Конвертоплан | 2017 |
|
RU2674622C1 |
| Конвертоплан | 2018 |
|
RU2682756C1 |
| Летательный аппарат вертикального взлета и посадки | 2018 |
|
RU2700154C1 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| БПЛА и способ управления БПЛА | 2024 |
|
RU2831546C1 |

Изобретение относится к авиации и касается создания пилотируемых и беспилотных летательных аппаратов вертикального взлета и посадки конвертируемого типа. Аппарат по первому варианту имеет попарно разнесенные в каждой из пересекающихся вертикальных плоскостей звездообразные, с четным количеством лучей, крылья. На их концах имеются силовые установки в мотогондолах с образованием в каждой из пересекающихся плоскостей жесткой конструкции. Крылья имеют адаптивные поверхности управления с возможностью их активации согласно требуемым режимам работы силовых установок и противодействию внешним возмущающим факторам в соответствии с реализуемыми объективными синергетическими законами единства процессов адаптации и управления. Нижние части мотогондол имеют выпускные водоизмещающие взлетно-посадочные средства изменяемого объема с возможностью уборки во внутренние полости мотогондол. По второму варианту аппарат оснащен четным количеством съемных аэродинамических крыльев оптимального удлинения. Их консоли закреплены на фюзеляже между плоскостями звездообразных крыльев, образуя различные аэродинамические компоновки. По третьему варианту в аппарате в каждой из силовых установок имеется не менее двух соосно-независимых приводов с воздушными винтами в тяговых кольцах. Каждое взлетно-посадочное средство может быть выполнено в виде складывающегося гофрированного цилиндра и сферы. Полость цилиндра делится на 2 полости эластичной поперечной перегородкой с редукционным клапаном. Оболочка сферы имеет возможность уборки и размещения в конечной полости цилиндра. Его торец имеет поворотные лепестки обтекателя. Взлетно-посадочные средства могут иметь расщепляемые створки. В их полостях закреплены надувные баллонеты. Изобретение позволяет создать аппарат с повышенной эффективностью на режимах взлета и посадки, особенно при турбулентности атмосферы, а также обладающий высокой скороподъемностью при меньших затратах мощности силовых установок и имеющий высокую маневренность и широкий диапазон изменения скорости полета, вплоть до зависания аппарата в воздухе с приданием аппарату амфибийных свойств. 3 н. и 6 з.п. ф-лы, 11 ил., 1 фото.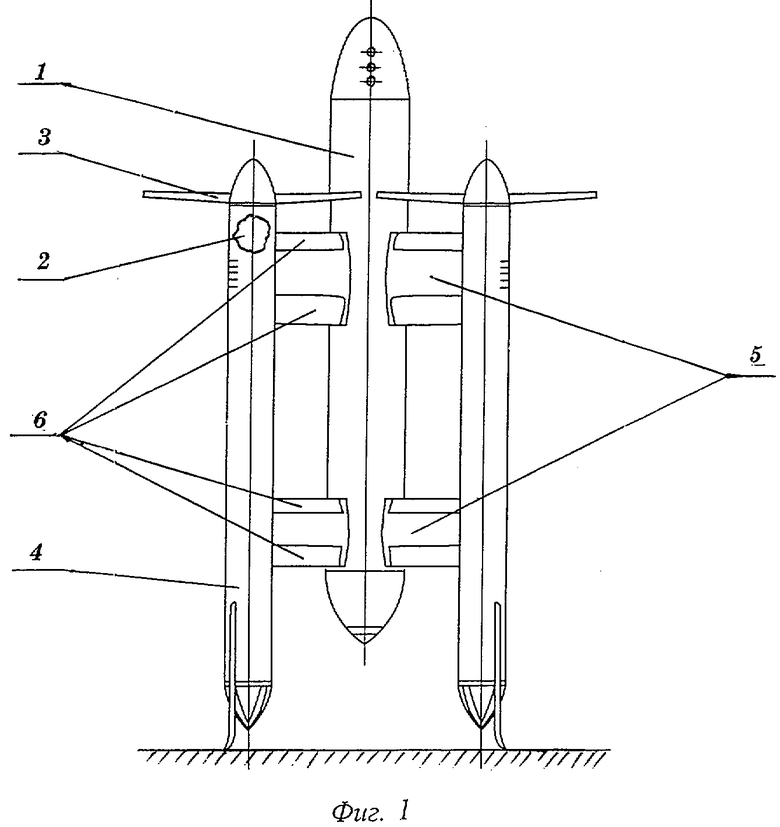
| Устройство для передачи конвейернвх тележек | 1977 |
|
SU628047A1 |
| Макаров Ю.В | |||
| Летательные аппараты МАИ | |||
| - М.: Издательство МАИ, 1994, с.114,115 | |||
| US 4037807 A, 26.07.1977. | |||

