Изобретение относится к области конструирования движущихся театральных кукол с ручным управлением и могут быть использованы в театральных комплексах для постановки спектаклей и представлений. Предлагаемое изобретение, касающееся кисти, может быть также отнесено к медицинской технике и найти применение при создании протезов кисти.
Известна управляемая вручную кукла-балерина /Патент США №3700384, МПК А63Н 13/02, опубл. 1972.10.24/ с двигающимися руками, ногами и головой, при этом руки и ноги двигаются синхронно, и это происходит так: если нога поднимается, руки двигаются вниз в направлении движения ноги, а когда руки поднимаются, одновременно начинают двигаться вниз ноги, чтобы занять вертикальное положение. Кукла вращается на пальцах обеих ног. В голове находится устройство, контролирующее вращение головы как функцию вращения торса.
Недостатком данной конструкции куклы является то, что ее движения запрограммированы, и ее голова, конечности не могут совершать самостоятельных, независимых движений.
Конструкция куклы согласно патенту США №5176560 / МПК А63Н 23/10, опубл. 05.01.1993/, такова, что она может свободно стоять на месте и танцевать. При этом ее конечности, туловище, голова приводятся в действие двигателем, включающимся от звука. Кукла управляется приводом с зубчатой передачей.
Недостатком данной куклы по отношению к заявляемому изобретению является то, что она неуправляема, а это ограничивает ее использование в театральных постановках в качестве партнера актера-кукольника.
Известна также кукла для театра универсальная /Патент РФ №2102066, МПК А63Н 13/02, опубл. 20.01.1998/, содержащая туловище с головой, шарнирно связанные с туловищем конечности и механизм их управления, включающий горизонтальную штангу с рукояткой, жестко соединенную со спинкой куклы, и элемент управления конечностей, кинематически соединенные посредством тяг с конечностями куклы. При этом между штангой и рукояткой расположена панель, на которой размещены элементы управления конечностей, а элементы управления ногами куклы выполнены в виде смонтированной на панели качалки, соединенной посредством тяги с качалкой, связанной с ногами, а головка выполнена съемной.
Движения данной куклы ограничены, т.е. она не может совершать вращательные движения головы, туловища, рук, что не дает возможности широко использовать ее для театральных постановок.
Наиболее близкой по конструкции к заявляемому изобретению театральной куклы является механическая кукла /Патент Великобритании №943154, МПК А63Н 3/18, А63Н 7/00, А63Н 13/00, опубл. 27.11.1963/, имеющая съемные голову, руки и ноги, вручную управляемый вращающийся привод, расположенный на или в теле куклы, к которому есть доступ сзади куклы, и механические средства для взаимодействия привода с головой, руками и ногами, при этом привод передает вращательное движение голове и колебательное движение ногам и рукам. Механическими средствами, связывающими привод с руками, ногами и головой, являются оси и конические зубчатые передачи. Привод, также выполненный на зубчатой передаче, управляется ручкой, вынесенной за тело куклы. При этом механическая взаимосвязь между съемными частями устроена так, что движение одной из частей вызывает движение других частей.
Недостатком данной куклы является то, что движение ее конечностей и головы взаимосвязаны и не могут производить независимых движений.
В качестве аналогов кисти театральной куклы могут быть использованы протезы кистей, так как их функция и конструкция схожи.
Так, в изобретении согласно патенту РФ №2103950 / МПК А61F 2/54, опубл. 10.02.1998/, протез функционально-косметической кисти содержит каркас «ладони», соединенный с имитатором «запястья», ротатором и с 1-м «пальцем» плоскими шарнирами с двусторонней фиксацией, имеющими расположенные в удобных местах кнопки расфиксации, а также фаланги I-V «пальцев», соединенные между собой и с каркасом «ладони» плоскими шарнирами с односторонней фиксацией на разгибание, имеющими удобно расположенную кнопку расфиксации всех шарниров II-V-го «пальцев».
Недостатком данного изобретения является сложность конструкции и управления движениями пальцев кисти.
Известна также механическая кисть /РФ №2245120, МПК А61F 2/56, опубл. 27.01.2005/, содержащая ладонь, искусственные пальцы, образованные шарнирно соединенными пустотелыми фалангами, жилки для сжатия искусственных пальцев в кулак и возвратные пружинки для выпрямления искусственных пальцев. Механическая кисть также содержит храповое колесо со шкивом, расположенным под храповым колесом и имеющим проточку по периметру для размещения пучка жилок, собачку храповика, вороток для поворачивания храпового колеса и фиксатор для удержания собачки, при этом жилки для сжимания искусственных пальцев в кулак закреплены в концах верхних фаланг, пропущены внутри искусственных пальцев, проходят в шкиве храпового колеса и закреплены в манжете, выполненной с возможностью установки выше локтевого сустава, причем искусственные пальцы выполнены с возможностью сжимания в кулак при сгибании руки или повороте шкива с помощью воротка за счет натяжения жилок и с возможностью выпрямления за счет возвратных пружинок при выпрямлении руки или при выведении собачки из зацепления с зубом храпового колеса.
Недостатком данной конструкции кисти является ее сложность и неестественность.
Наиболее близкой к заявляемой конструкции кисти является протез кисти /Европейский патент №219478, МПК А61F 2/56, опубл. 22.04.1987/, содержащий каркас, предназначенный для непосредственного или косвенного присоединения к предплечью, ладонь, пару пальцев - указательный и средний, большой палец и соединительное звено, при этом ладонь установлена на каркасе с возможностью вращения вокруг запястья в точке В, пара пальцев присоединена с возможностью вращения к ладони через пальцевой сустав в точке поворота А, большой палец жестко привязан к ладони и имеет длину и расположение такие, как у естественной кисти, соединительное звено установлено с возможностью вращения одним концом на второй точке вращения С, расположенной на или механически связанной с парой пальцев, а другим концом установлено с возможностью вращения на каркасе для формирования такого рычажного механизма, содержащего четыре точки поворота, что при приведении рычажного механизма в действие протез кисти совершает естественное движение сжимания пальцев. Рычажный механизм может приводиться в действие электродвигателем, расположенным в ладони.
Задачей, решаемой данными изобретениями, является создание куклы-партнера актеру, работающему с ней в паре и имитирующей наиболее полно движения человека.
Поставленная задача решается за счет того, что театральная кукла, имеющая туловище, голову, руки и ноги, вручную управляемый привод, установленный с возможностью вращения в туловище куклы, к которому есть доступ сзади куклы, механические средства для взаимодействия привода с головой, руками и ногами и обеспечивающие вращательное движение головы и колебательное движение ног, согласно изобретению содержит механические средства, соединенные с приводом, обеспечивающие наклон головы, поднятие плеч и вращательное движение туловища в поясничной области.
Привод может быть выполнен в виде ведущего шкива, закрепленного на раме, расположенной в полости туловища куклы.
Кроме этого, в частном случае выполнения
механическое средство поднятия плеч включают в себя два независимых управляемых средним и безымянным пальцами кисти кукловода рычага, установленных на ведущем шкиве, передающих поступательное движение к плечевым рычагам при помощи гибкой связи и блоков;
механическое средство, обеспечивающее вращательное движение головы, включает в себя поворотно-прижимную раму, управляемую большим пальцем кисти кукловода, установленную соосно на ведущем шкиве, вращение которой передается креплению головы посредством фрикционного ролика и валов;
механическое средство, обеспечивающее наклон головы, состоит из рычага, управляемого указательным пальцем кисти кукловода, расположенного на ведущем шкиве, соединенного с креплением головы посредством гибкой связи;
механическое средство вращения туловища в поясничной области и колебания ног состоит из переключающего рычага с прижимной рамой, управляемых мизинцем кисти кукловода, установленных на ведущем шкиве, соединенном посредством гибких связей и роликов с ведомым шкивом, в котором размещен вал-шток с жестко закрепленной на нем конической зубчатой шестерней, входящей в зацепление с зубчатыми коническими шестернями ног, и тазобедренного механизма, состоящего из неподвижного диска, связанного шарнирами с рамой туловища, подвижного и промежуточного дисков, внешних и внутренних роликов, соединенных попарно, причем внешние ролики взаимодействуют с неподвижным диском, а внутренние - с подвижным.
Помимо этого, для облегчения актеру-кукловоду работы с куклой промежуточный диск может быть связан с поясом кукловода через опорный рычаг.
Наиболее предпочтительным вариантом исполнения изобретения является кукла с подвешенными к ее туловищу руками с помощью сферических шарниров, такие же шарниры могут использоваться в качестве локтевых суставов.
Для того чтобы кисть куклы была управляема и могла совершать сжимающие движения, в полости руки предусмотрены аккумуляторная батарея, двигатель, кнопочная станция, редуктор, вал привода с токоприемником передачи питания в кисть для управления движением пальцев.
Задача создания кисти куклы, обладающей естественными движениями пальцев, решается за счет того, что в кисти с пальцами и ладонью, содержащей рычажную систему сгибания по меньшей мере одного из пальцев, кроме большого, редуктор с двигателем, согласно изобретению рычажная система состоит из рамы, одна конечная часть которой жестко закреплена в большом пальце, и двух шарнирно установленных на раме рычагов, имеющих отростки, взаимодействующие между собой, причем один рычаг расположен в ладони и соединен посредством винтового механизма с редуктором, а второй рычаг и другая конечная часть рамы расположены в одном из четырех пальцев.
Наиболее естественным исполнением кисти куклы является ее изготовление из эластичного полимерного материала.
Изобретение поясняется следующими чертежами и фотографиями:
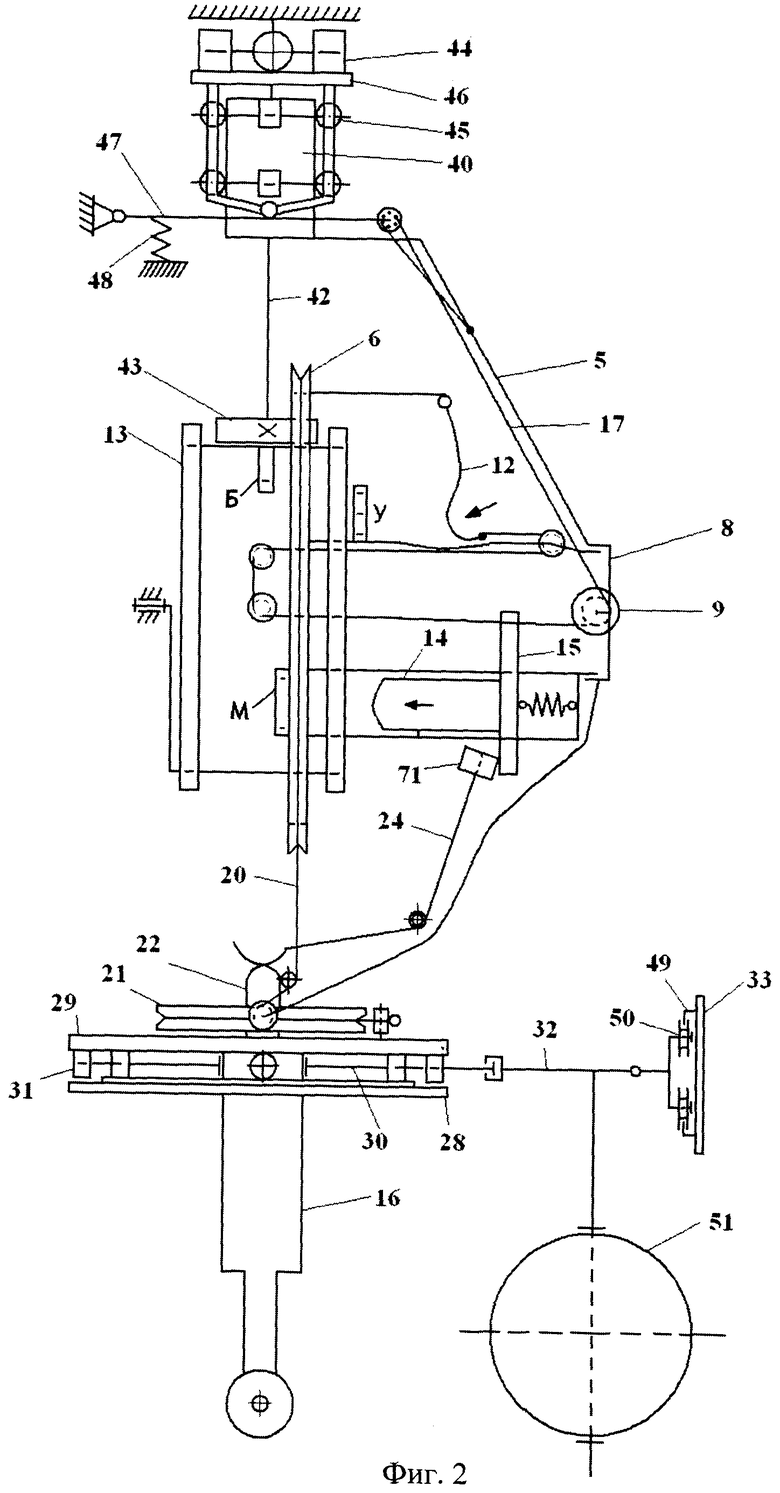
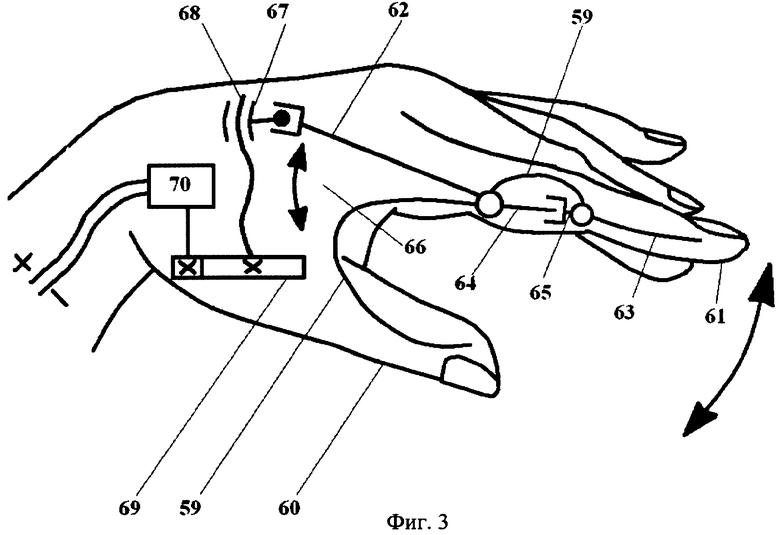
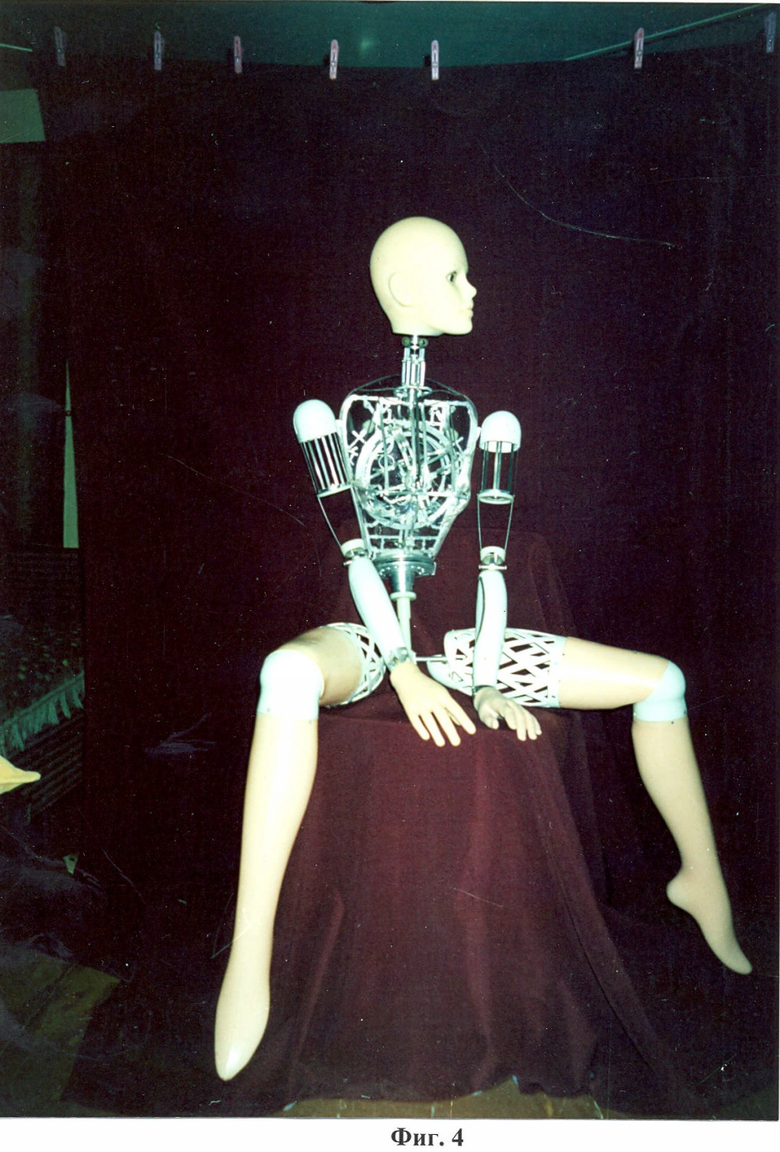
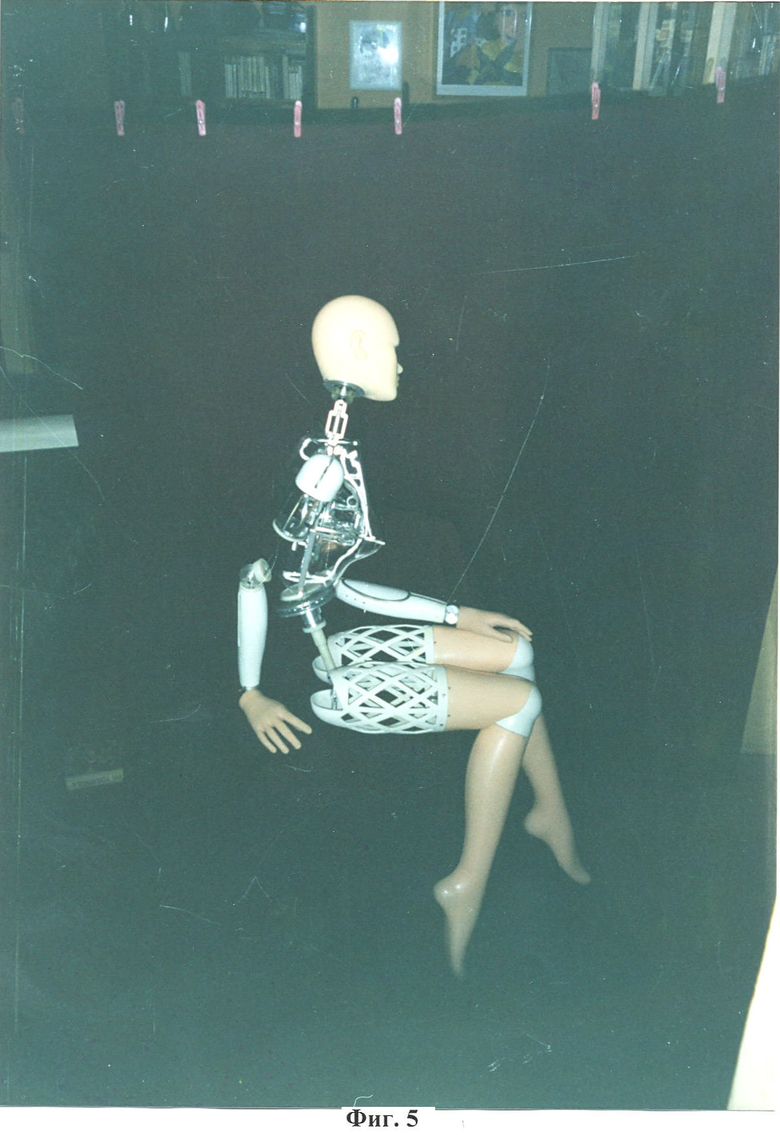
на фиг.1 представлена общая кинематическая схема управления куклы, вид спереди; на фиг.2 - вид схемы управления куклы сбоку, на фиг.3 - механизм сгибания указательного пальца кисти, на фиг.4 - фотография сидящей куклы, вид спереди, на фиг.5 - фотография сидящей куклы, вид сбоку.
Кукла содержит туловище 1, голову 2, руки 3 и ноги 4. Двигательный механизм куклы находится в полости туловища 1 и конечностей 3, 4 и состоит из основной рамы 5, расположенной в туловище 1, на которой установлен привод - ведущий шкив 6 при помощи четырех опорных роликов 7 и полого подшипника скольжения 8 с находящимся в нем роликовым блоком 9. На ведущем шкиве 6 расположены два рычага 10, 11 управления подъема плеч, рычаг 12 наклона головы 2, поворотно-прижимная рама 13 поворота головы 2, переключающий рычаг 14 с прижимной рамой 15 управления поворота тазобедренного механизма 16 и движения ног 4. Все рычаги управления передают поступательные движения при помощи гибких связей 17, которые имеют амортизирующие элементы 18 и направляющие ролики 19.
Для передачи вращательного движения ведущий шкив 6 связан гибкими связями 20 с ведомым шкивом 21, в котором расположен четырехгранный вал-шток 22 с жестким закреплением на нем конусной шестерни 23. Вал-шток 22 совершает поступательное движение через включающий рычаг 24 от рамы 15 с закрепленным на ней переключающим рычагом 14.
Изменяя свое положение, вал-шток 22 входит в зацепление с коническими шестернями ног 25, что приводит ноги 4 в колебательное движение. Через двухсторонний рычаг 26 вал-шток 22 входит в зацепление с выступами муфты 27 подвижного диска 28, что приводит к повороту тазобедренного механизма 16 и ног 4.
Тазобедренный механизм 16 связан с основной рамой 5 шарнирами, закрепленными на неподвижном (относительно вращения) диске 29.
Вращение подвижного диска 28 относительно неподвижного 29 осуществляется при помощи промежуточного диска 30. На диске 30 расположены восемь внешних и внутренних роликов 31, соединенных попарно. Внешние ролики взаимодействуют только с неподвижным диском 29, внутренние - с подвижным диском 28.
Это расположение позволяет промежуточному диску 30 быть независимым от вращения таза. Промежуточный диск 30 через опорный рычаг 32 связан с поясом 33 кукловода.
Рычаги 34 поднятия плеч закреплены шарнирно на основной раме 5 и имеют ломающийся рычаг 35, который фиксируется ползуном 36 с пазами и пружиной 37, что позволяет изменять расположение плеч относительно оси подъема. Гибкими связями а и направляющими роликами 38, 39 рычаги 34 связаны с соответствующими независимыми друг от друга рычагами поднятия плеч 10, 11.
Механизм наклона головы осуществлен на направляющем цилиндре 40 с расположенным на нем гибким валом 41. Гибкий вал 41 закреплен с жестким валом 42, который имеет фрикционный ролик 43. Фрикционный ролик 43 передает вращение от поворотно-прижимной рамы 13 через валы 41 и 42 креплению головы 2, в основании которой расположены четыре ролика скольжения 44. Они прижаты через раму с восьмью роликами 45 к площадке 46 (фиг.2) рычагом 47 с пружиной 48.
Кукла крепится к поясу 33 кукловода, который состоит из направляющей 49 с роликами 50 и опорного рычага 32. Опорный рычаг 32 имеет ролик 51, который необходим при движении рычага с куклой вокруг пояса кукловода для упорного скольжения по бедрам тела.
Рука 3 подвешена на туловище 1 с помощью сферических шарниров 52. С помощью также сферических шарниров 53 происходит сгибание руки в локте.
В полости руки расположены аккумуляторная батарея 54, двигатель 55 с редукторами, вал привода 56 с токоприемником 57 передачи питания двигателю, расположенному в кисти, и управляющему движением пальцев посредством кнопочной станции 58.
Кисть куклы с пальцами, ладонью содержит рычажную систему сгибания указательного пальца, которая состоит из рамы 59, одна конечная часть которой расположена в большом пальце 60, а другая конечная часть рамы расположена в указательном пальце 61. На раме 59 шарнирно установлены подвижные рычаги 62 и 63, имеющие соответственно отростки 64, 65, взаимодействующие между собой, причем рычаг 62 установлен в ладони 66, а рычаг 63 - в указательном пальце 61. Система сгибания пальца соединена через винтовой механизм, состоящий из гайки 67, расположенной на винте 68, с редуктором 69, соединенным с двигателем 70. Часть рамы 59, расположенной в большом пальце 60, жестко закреплена в нем. Редуктор 69 с двигателем 70 жестко крепится в ладони 66 кисти.
Управление куклы осуществляется одной из кистей кукловода, находящейся на ведущем шкиве 6 с задействованием всех пальцев: большой палец управляет механизмом поворота головы вправо-влево, указательный - механизмом наклон головы, средний и безымянный - механизмом управление поднятия плеч, мизинец - механизмом вращения туловища в поясничной области и колебания ног. Функции плеч и головы не изменяются при основном движении (влево-вправо) ведущего шкива 6 кистью кукловода при помощи колец для указательного пальца У и мизинца М.
Движение ведущего шкива 6 позволяет приводить во вращательное действие тазобедренный механизм 16, а с последующим переключением рычага 14 мизинцем кисти превращать вращательное движение в колебательное движение ног 4.
Управление движением куклы осуществляется следующим образом.
Кисть кукловода находится внутри полости туловища 1 куклы со стороны спины. Указательный палец кисти располагается в кольце У и на рычаге наклона головы 12, мизинец - в кольце М и на переключающем рычаге 14, большой палец - в кольце Б, расположенном на поворотно-прижимной раме 13 поворота головы, средний и безымянный - на рычагах 10, 11. Нажимая на рычаги 10, 11 и 12 пальцами, кукловод добивается следующих движений куклы: независимое поднятие и опускание плеч, наклон головы. Поворотом влево-вправо с последующим прижимом к фрикционному ролику 43 рамы 13 кукловод добивается поворота головы 1 куклы. При переключении мизинцем рычага 14 усилие передается включающему рычагу 24 через раму 15. Рычаг 24 с находящимся на нем роликом 71 передает усилие вал-штоку 22. Вал-шток 22 с находящейся на нем конусной шестерней 23 входит в зацепление с шестернями 25 ног. В таком положении, вращая влево-вправо ведущий шкив 6, кукловод передает вращательное движение посредством гибких связей 20 ведомому шкиву 21, который передает движение вал-штоку 22 с находящимися в зацеплении шестернями 25 ног. Так как коленные суставы выполнены шарнирно (не показано) и кукловод ведет куклу, кукла делает шаги с выбрасыванием нижних частей ног. С освобождением рычага 14 пружина 72, действуя на вал-шток 22 снизу, выводит из зацепления зубчатые конические шестерни 25 ног 4 и приводит в зацепление двухсторонний рычаг 26 с выступами муфты 27, что приводит при дальнейшем вращении ведущего шкива 6 к вращению тазобедренного механизма 16. С дальнейшим освобождением рычага 14 шток 22 выходит из зацепления с муфтой 27 подвижного диска 28 в нейтральное положение.
Кисть куклы работает следующим образом.
От двигателя 70 вращательное движение через редуктор 69 передается винту 68, на котором гайка 67 передает возвратно-поступательное движение рычагу 62. Рычаг 62 при помощи отростка 64 взаимодействует с отростком 65 рычага 63. Рычажная система позволяет сгибать в фаланге указательный палец 61 до соприкосновения с большим пальцем 60 кисти, тем самым создавая эффект сжатия пальцев кисти.
На фиг.4, 5 изображены пластические возможности шарнирных узлов куклы, позволяющие подобно человеческому телу занимать ею различные естественные положения.
Таким образом, предложенная конструкция куклы, управляемой кистью кукловода, может совершать различные независимые друг от друга движения, имитирующие естественные движения человека, что позволяет широко использовать ее в качестве партнера актеру-кукловоду при постановке различных спектаклей и постановок.
Представленная конструкция кисти проста в изготовлении и управлении и может быть использована не только при изготовлении кисти рук куклы, но и при производстве протезов кисти человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| Театральная кукла | 1933 |
|
SU37543A1 |
| КУКЛА | 1996 |
|
RU2105588C1 |
| КУКЛА ДЛЯ ТЕАТРА УНИВЕРСАЛЬНАЯ | 1992 |
|
RU2102099C1 |
| СПОСОБ И УСТРОЙСТВО ОЗДОРОВЛЕНИЯ ОРГАНИЗМА ЧЕЛОВЕКА | 2004 |
|
RU2282429C2 |
| Театральная кукла | 1934 |
|
SU42452A1 |
| МЕХАНИЧЕСКАЯ ИГРУШКА | 1992 |
|
RU2062630C1 |
| СПОСОБ ОБУЧЕНИЯ МЛАДШИХ ШКОЛЬНИКОВ С РЕЧЕВЫМИ НАРУШЕНИЯМИ | 2004 |
|
RU2287190C2 |
| СПОСОБ ЛЕЧЕБНО-ОЗДОРОВИТЕЛЬНОГО ВОЗДЕЙСТВИЯ НА ЧЕЛОВЕКА | 1998 |
|
RU2121332C1 |
| СИСТЕМА УПРАВЛЕНИЯ КУКЛОЙ, ПЕРЕНОСНАЯ СИСТЕМА УПРАВЛЕНИЯ КУКЛОВОДА И ПЕРЕНОСНАЯ СИСТЕМА УПРАВЛЕНИЯ КУКЛОЙ | 2020 |
|
RU2770761C1 |
| СПОСОБ АНИМАЦИИ ПЕРЕДВИГАЮЩЕЙСЯ С ПОМОЩЬЮ ДВИГАТЕЛЯ КУКЛЫ И ПОДОБНЫХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2091112C1 |
Изобретение относится к театральным куклам, движущимся посредством ручного управления. Кукла содержит туловище, голову, руки, ноги, ручной привод, механическое средство, обеспечивающее вращательное движение головы, механическое средство для взаимодействия привода с ногами и обеспечивающее колебательное движение ног, механические средства, обеспечивающие наклон головы и поднятие плеч, установленные на приводе и независящие от его вращения. При этом механическое средство, обеспечивающее колебательное движение ног, выполнено с возможностью обеспечения поворота ног относительно туловища, а механические средства, обеспечивающие вращательное движение головы, наклон головы и поднятие плеч, а также привод выполнены с возможностью управления пальцами кисти кукловода. Кисть куклы с пальцами и ладонью содержит рычажную систему сгибания по меньшей мере одного из пальцев, кроме большого, редуктор с двигателем. Рычажная система состоит из рамы, одна конечная часть которой жестко закреплена в большом пальце, и двух шарнирно установленных на раме рычагов, имеющих отростки, взаимодействующие между собой. Один рычаг расположен в ладони и соединен посредством винтового механизма с редуктором, а второй рычаг и другая конечная часть рамы расположены в одном из четырех пальцев. В изобретении кукла имеет возможность совершать различные независимые друг от друга движения, имитирующие естественные движения человека. 2 н. и 10 з.п. ф-лы, 5 ил.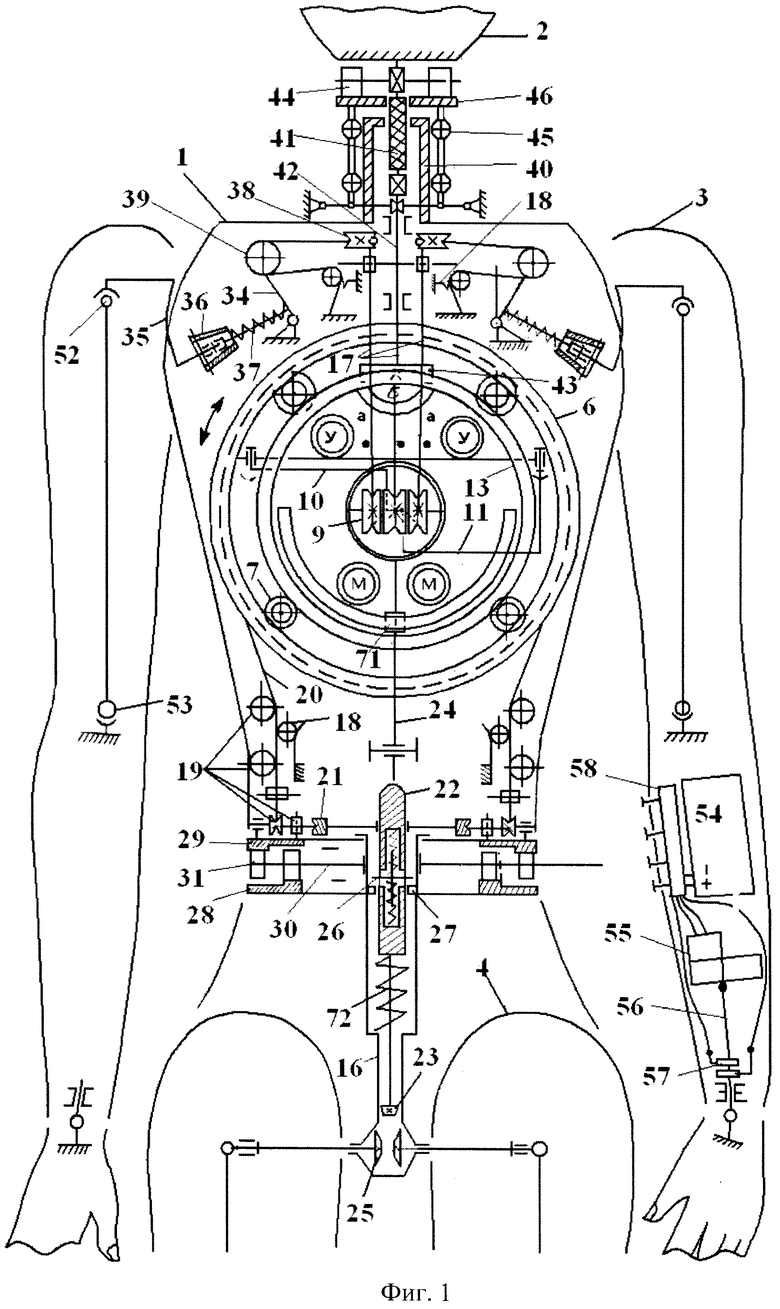
| Пневматический камерный насос для транспортирования сыпучих материалов | 1976 |
|
SU943154A2 |
| US 5176560 А, 05.01.1993 | |||
| RU 2004299 С1, 15.12.1993 | |||
| US 3683423 А, 15.08.1972 | |||
| US 3521303 А, 21.07.1970. | |||

