Изобретение относится к точному приборостроению и может быть использовано для определения плотности и вязкости жидких сред в различных отраслях промышленности.
Известен вибрационный способ исследования жидкостей [1], включающий возбуждение колебаний на резонансной частоте зонда, погруженного в исследуемую жидкость, с постоянной амплитудой, измерение частоты и амплитуды возбуждающей силы, при этом амплитуду колебаний зонда устанавливают равной амплитуде, при которой достигается экстремальное значение резонансной частоты зонда в зависимости от амплитуды колебаний.
Наиболее близок способ исследования теплофизических свойств жидкостей [2], в частности плотности и вязкости, включающий возбуждение гармонических колебаний на резонансной частоте зонда, помещенного в измеряемую среду, измерение температуры среды, а также амплитуды, и/или фазы, и/или частоты колебаний вибрационного преобразователя плотности с последующим вычислением плотности и вязкости с учетом температуры по уравнению теплопроводности жидкости и по уравнению вынужденных колебаний вибрационного преобразователя плотности.
Эти способы имеют общий недостаток, они основаны на заданной резонансной частоте зонда, помещенного в измеряемую среду, что в общем случае существенно ограничивает их область применения.
Наиболее близким устройством являются плотномер с дистанционно расположенной электроникой контроля [3], содержащий последовательно соединенные микропроцессор, программируемый делитель, контур фазовой автоподстройки частоты, счетчик, ПЗУ с прошивкой функции косинус, ЦАП, согласующий усилитель мощности, выход которого подключен к входу вибрационного преобразователя, помещенного в измеряемую среду, а выход вибрационного преобразователя последовательно соединен с детектором переходов нуля, реверсивным счетчиком с соответствующей логикой и микропроцессором, кроме того, второй вход программируемого делителя подключен к генератору.
Все вышеизложенные способы и устройства имеют общий недостаток, существенно снижающий точность и ограничивающий область применения, а именно - недостаточно высокую помехоустойчивость, поскольку в общем случае в выходном сигнале вибрационных преобразователей наряду с полезным сигналом присутствуют и помехи, обусловленные как отраженным сигналом, например, при установке вибрационного преобразователя в достаточно малом объеме; неламинарным течением жидкости при установке вибрационного преобразователя в трубопроводе; вибрациями подвижного основания при установке вибрационного преобразователя в топливных баках различных машин.
Цель изобретения - повышение точности, а также расширение области применения.
Поставленная цель достигается тем, что в способе измерения плотности и вязкости, включающим возбуждение непрерывных гармонических колебаний вибрационного преобразователя, помещенного в измеряемую среду, измерение температуры среды, а также измерение выходного сигнала вибрационного преобразователя с последующим вычислением плотности и вязкости, дополнительно на периоде частоты возбуждения формируют выборку значений выходного сигнала вибрационного преобразователя, осуществляют контроль данных в выборке, по результатам которого производят автоподстройку коэффициента усиления и нормируют данные в выборке, вычисляют по нормированным данным коэффициенты преобразования Фурье для первой гармоники сигнала, по которым осуществляют контроль уровня помех, поиск зоны резонанса, а в зоне - резонанса захват и удержание частот резонансов с заданными фазовыми сдвигами.
Кроме того, возбуждение непрерывных гармонических колебаний вибрационного преобразователя осуществляется сигналом с заданными частотой и фазой с формированием меандра с фронтами, совпадающими с нулевыми значениями сигнала возбуждения.
Кроме того, при измерении выходного сигнала вибрационного преобразователя дополнительно по заданному периоду частоты возбуждения осуществляют вычисление времени задержки и времени дискретизации, по которым компенсируют начальный фазовый сдвиг выходного сигнала вибрационного преобразователя относительно сигнала возбуждения и синхронизируют измерения в выборке.
Кроме того, вычисление плотности и вязкости производится по периодам частот резонансов с заданными фазовыми сдвигами по интерполяционным формулам, при этом при вычислении плотности, контролируя полосу зоны резонанса, компенсируют влияние вязкости на плотность.
А в устройство для реализации способа, содержащее сигнальный процессор, к которому шиной интерфейса подключен программируемый синтезатор частоты, первый выход которого через усилитель мощности соединен со входом вибрационного преобразователя, помещенного в исследуемую среду, дополнительно введены усилитель с программируемым коэффициентом усиления, вход которого соединен с выходом вибрационного преобразователя, а шина интерфейса и выход подключены к сигнальному процессору, датчик температуры, помещенный в исследуемую среду, шина интерфейса которого соединена с сигнальным процессором, соединенным со вторым выходом и входом синхронизации синтезатора частоты и через шину интерфейса с приемопередатчиком, выходная шина которого является входом - выходом устройства.
Таким образом, введение новых действий и операций, а также новых связей и элементов позволило существенно повысить точность и расширить область применения за счет повышения помехоустойчивости, учета влияния вязкости на плотность и обеспечения максимально возможной амплитуды входного сигнала за счет программно реализованной автоподстройки коэффициента усиления.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема устройства.
Устройство для реализации предложенного способа содержит сигнальный процессор 1, программируемый синтезатор 2 частоты, усилитель 3 мощности, вибрационный преобразователь 4, усилитель 5 с программируемым коэффициентом усиления, датчик 6 температуры, приемопередатчик 7 и вход-выход 8.
Сигнальный процессор 1 шиной интерфейса подключен к программируемому синтезатору 2 частоты, первый выход которого через усилитель 3 мощности соединен с входом вибрационного преобразователя 4, помещенного в исследуемую среду, вход усилителя 5 с программируемым коэффициентом усиления подключен к выходу вибрационного преобразователя 4, а его шина интерфейса и выход соединены с сигнальным процессором 1, выход датчика 6 температуры, помещенного в исследуемую среду, соединен с сигнальным процессором 1. Кроме того, вход синхронизации и второй выход синтезатора 2 частоты соединены с сигнальным процессором 1, подключенным шиной интерфейса к приемопередатчику 7, выходная шина 8 которого является входом- выходом устройства.
Устройство для реализации предложенного способа можно реализовать, например, на следующих элементах: сигнальный процессор 1 на DSP56F801; программируемый синтезатор 2 частоты на AD9834; усилитель 3 мощности можно выполнить на операционном усилителе общего применения; в качестве вибрационного преобразователя 4 может использоваться датчик, описанный в [4]; усилитель 5 с программируемым коэффициентом усиления на MCP6S21; датчик 6 температуры на DS18B20; а приемопередатчик 7 на МАХ233.
Данный способ основан на изменении частоты и добротности резонанса вибрационного преобразователя 4, помещенного в измеряемую среду, в зависимости от ее плотности и вязкости. Способ базируется на преобразовании Фурье с применением цифрового вычислителя, работающего в реальном масштабе времени, включает два режима работы и его можно представить, например, в виде следующих действий и операций:
В первом режиме осуществляют поиск зоны резонанса, для этого:
Производят возбуждение непрерывных механических колебаний вибрационного преобразователя 4 с максимальной частотой Fmax [Гц] и фазовым сдвигом ψ=0 [рад], записывая коды частоты и фазового сдвига в соответствующие регистры синтезатора 2 частоты. При этом на первом выходе синтезатора 2 частоты формируется синусоидальный сигнал с заданными частотой и фазовым сдвигом, а на его втором выходе формируется меандр с фронтами, совпадающими с нулевыми значениями этого синусоидального сигнала.
Производят программирование усилителя 5, обеспечивая максимальный коэффициент усиления k=kmax.
Для измерения выходного сигнала вибрационного преобразователя 4 производят расчет времени задержки τ для компенсации угла его фазового сдвига ϕ0 по формуле τ=(π/2-ϕ0)/2πFmax[с] и запись его кода во второй таймер сигнального процессора 1. Вычисляют период Td частоты дискретизации для синхронизации замеров входного сигнала как Тd=1/4Fmax[с] и записывают его код в первый таймер сигнального процессора 1 и запускают сторожевой таймер сигнального процессора 1 на время t=2/Fmax[с].
Формируют выборку измеренных значений выходного сигнала с вибрационного преобразователя 4 на данном периоде частоты возбуждения. Для этого по фронту 0/1 сигнала со второго выхода синтезатора 2 частоты запускают второй таймер сигнального процессора 1, по прерыванию которого осуществляют первый запуск АЦП и запуск первого таймера сигнального процессора 1, далее запуск АЦП и перезапуск первого таймера производят по прерыванию первого таймера три раза, осуществляя тем самым четыре замера в выборке на этом периоде сигнала возбуждения, кроме того, по этому фронту перезапускают сторожевой таймер сигнального процессора 1, а если этого фронта не будет за время t, то по прерыванию сторожевого таймера фиксируют неисправность, выдавая ее соответствующим кодом. По прерыванию АЦП сигнального процессора 1 производят чтение его кода Uj, где j=0, 1, 2, 3 - номер замера на данном периоде частоты возбуждения.
Осуществляют контроль замеров в выборке по выполнению условия |Uj|<nmax Для всех четырех замеров в выборке на данном периоде сигнала возбуждения, где nmax - максимальное значение кода АЦП сигнального процессора 1.
При отрицательном результате контроля любого кода замера в выборке производят автоподстройку коэффициента усиления, уменьшая коэффициент усиления ki в следующей выборке на данной частоте на заданный шаг. Производят вышеперечисленные действия до тех пор, пока не будет выполняться это условие для всех четырех замеров в выборке на данной частоте возбуждения. Если это условие не выполняется при ki=kmin где kmin - минимальный коэффициент усиления, то фиксируют неисправность, выдавая ее соответствующим кодом.
При положительном результате контроля замеров в выборке производят нормирование, вычисляя коэффициент нормирования kn по формуле kn=kmin/ki и формируя нормированные данные Nj=kn Uj.
Осуществляют численным методом преобразование Фурье, вычисляя коэффициенты постоянной составляющей - а0 и амплитуды - a1, в1 первой гармоники входного сигнала по формулам:
a0=(N0+N1+N2+N3)/4,
a1=(N0-N2)/2,
в1 i=(N1-N3)/2.
Производят контроль уровня помех.
По условию |а0|<δ2, где δ2 - заданный допуск, определяется необходимой точностью измерения, производят контроль уровня низкочастотной помехи.
При отрицательном результате контроля запускают сторожевой таймер на время tn, где tn определяется максимальным периодом допустимой низкочастотной помехи, и повторяют цикл измерения на данной частоте возбуждения, начиная в следующей выборке с операции автоподстройки коэффициента усиления, до выполнения данного условия, после чего сбрасывают сторожевой таймер, а если это условие не выполняется за это время tn, то по прерыванию сторожевого таймера фиксируют отказ, выдавая его соответствующим кодом.
В противном случае по условиям ||N0-а0|-|N2-а0||<δ1 и
||N1-а0|-|N3-а0||<δ1, где δ1 - заданный допуск, определяется необходимой точностью измерения, производят контроль уровня высокочастотной или импульсной помехи.
При отрицательном результате контроля любого условия запускают сторожевой таймер на время tв, где tв определяется максимально допустимым временем действия высокочастотной помехи, и повторяют цикл измерения на данной частоте возбуждения, начиная в следующей выборке с операции автоподстройки коэффициента усиления, до выполнения данного условия, после чего сбрасывают сторожевой таймер, а если это условие не выполняется за это время tв, то по прерыванию сторожевого таймера фиксируют отказ, выдавая его соответствующим кодом.
В противном случае по условиям |a1|<δ3 и |в1|<δ3, где δ3 - заданный допуск, определяется уровнем случайной составляющей выходного сигнала с вибрационного преобразователя 4, производят контроль наличия синфазной помехи.
При положительном результате контроля обоих условий производят перепрограммирование синтезатора 2 частоты, обеспечивая в следующей выборке фазовый сдвиг ψi=π [рад] и повторяют цикл измерения на данной частоте возбуждения, начиная с операции автоподстройки коэффициента усиления, при повторном аналогичном результате фиксируют неисправность, выдавая ее соответствующим кодом.
В противном случае приступают к поиску зоны резонанса, для этого:
- повторяют цикл измерения на данной частоте возбуждения заданное количество тактов, которое определяется постоянной времени вибрационного преобразователя 4, и вычисляют среднее значение A1 и B1 коэффициентов a1 и в1;
- фиксируют значения данные значения F, ψ, A1 и B1, формируя соответствующие элементы массивов МA, МB, МF и Мψ;
- производят перепрограммирование синтезатора 2 частоты, уменьшая частоту возбуждения на заданную величину, которая определяется постоянной времени вибрационного преобразователя 4, и повторяют цикл измерения на данной частоте возбуждения, формируя следующие элементы массивов, и так далее до минимальной частоты возбуждения;
- производят обработку полученных массивов, определяя Fi и ψi, при которых коэффициент А1 i имеет максимальное значение, при этом производят проверку фазового сдвига выходного сигнала вибрационного преобразователя 4 относительно сигнала возбуждения, вычисляя значение котангенса угла фазового сдвига по формуле ctg ϕi=Вi/Аi, и контролируют его на попадание в зону резонанса по выполнению условия |ctg ϕi|<δ4, где δ4 - заданный допуск, определяется необходимой точностью измерения;
- при отрицательном результате исключаются элементы массива, соответствующие зафиксированному значению частоты возбуждения Fi, и определяется следующее значение периода частоты возбуждения Fi, при которой коэффициент A1 i+1 имеет максимальное значение.
При положительном результате приступают к второму режиму работы, а именно поиску резонансных частот с заданными фазовыми сдвигами, для этого:
- производят программирование синтезатора 2 частоты, обеспечивая выдачу им сигнала возбуждения с определенной ранее частотой и фазовым сдвигом;
- повторяют цикл измерения на данной частоте возбуждения Fi, получая соответствующие коэффициенты A1 i и В1 i и текущее значение ctg ϕi угла фазового сдвига;
- по знаку текущего значения ctg ϕi определяют ближайшую резонансную частоту с заданными фазовыми сдвигами, например при плюсе с фазовым сдвигом - 45°, а при минусе с фазовым сдвигом - 135° относительно сигнала возбуждения;
- осуществляют поиск этой частоты, формируя следующее значение Fi+1 частоты возбуждения по пропорциональному закону управления (приращение частоты возбуждения пропорционально отклонению текущего фазового сдвига относительно заданного) до выполнения условий обеспечения данных фазовых сдвигов - 1-δ5≤ctg ϕi≤-1+δ5 или 1-δ5≤ctg ϕi≤1+δ5, где δ5 - заданный допуск, определяется необходимой точностью измерения. После нахождения одной из резонансных частот с заданными фазовыми сдвигами аналогичным образом осуществляют поиск второй, вычисляют период T1 резонансной частоты с фазовым сдвигом - 135° и период Т2 резонансной частоты с фазовым сдвигом - 45°, после чего переходят к удержанию резонансных частот с заданными фазовыми сдвигами и расчету выходных параметров, для этого:
- поочередно программируют синтезатор 2 частоты для генерирования определенных выше частот возбуждения с заданными фазовыми сдвигами, повторяя цикл измерения на каждой частоте возбуждения и производя на каждой заданное количество измерений, которое определяется необходимой точностью измерения, осуществляя при этом контроль условий -1-δ5≤ctg ϕi≤-1+δ5 или 1-δ5≤ctg ϕi≤1+δ5 и подстраивая при необходимости частоту возбуждения с учетом знака в ту или иную сторону;
- вычисляют средние значения T1 Σ и Т2 Σ [с];
- вычисляют полосу зоны резонанса по формуле Z=T1 Σ-Т2 Σ [с];
- контролируя выполнение условия Z<δZ, где δZ - заданный допуск, компенсируют влияния вязкости на плотность, при положительном результате вычисляя период частоты резонанса TR по формуле TR=T1 Σ [с], в противном случае по формуле TR=T1 Σ-v(Z-z) [с], где v, z - коэффициенты учета влияния вязкости на плотность;
- осуществляя чтение кода датчика 6 температуры, определяют температуру t° измеряемой среды;
- контролируя условие TR<δП, где δП - заданный допуск, определяют диапазон, при положительном результате вычисляя плотность с учетом температурной поправки, по интерполяционной формуле учитывающей нелинейность характеристики вибрационного преобразователя 4 Р=Р0+κ0(ТR)2+κtt° [кг/м3], где κt - коэффициент температурной поправки плотности, в противном случае меняют константы Р0 на P1, а к0 на к1.
- контролируя условие Z<δV, где δV - заданный допуск, определяют диапазон, при положительном результате вычисляя вязкость по интерполяционной формуле учитывающей нелинейность характеристики вибрационного преобразователя 4
V=Р[κ2(Z)2+κ3Z+Δ1] [м2/с], где κ2, κ3, Δ1 - константы преобразования полосы зоны резонанса в вязкость, в противном случае меняют константы к2 на к4, к3 на к5, a Δ1 на Δ2 и производят выдачу результатов.
Устройство, реализующее данный способ, работает следующим образом.
При включении питания происходит инициализация сигнального процессора 1, то есть начинает выполняться соответствующая программа, которая производит сброс соответствующих регистров, сброс ячеек памяти ОЗУ в ноль, маскирование соответствующих прерываний, программирование портов ввода - вывода и регистров управления и тому подобное.
Далее сигнальный процессор 1 инициализирует синтезатор 2 частоты, записывая в его регистры управления и регистры частоты и фазы соответствующие коды по соответствующим линиям связи шины интерфейса, при этом на первом выходе синтезатора 2 частоты формируется синусоидальный сигнал частоты возбуждения, который через согласующий усилитель 3 мощности подается на вход возбуждения вибрационного преобразователя 4, а на его втором выходе формируется меандр с фронтами, соответствующими переходам через ноль синусоидального сигнала, и этот меандр по соответствующей линии связи подается на соответствующий вход сигнального процессора 1, осуществляющего синхронизацию процесса измерения в выборке по фронту 0/1 этого меандра путем запуска встроенного АЦП в определенные моменты времени. Кроме того, сигнальный процессор 1 контролирует с помощью сторожевого таймера период этого меандра, выдавая соответствующий код неисправности при его отсутствии, затем сигнальный процессор 1 инициализирует усилитель 5 с программируемым коэффициентом усиления, вход которого соединен с выходом вибрационного преобразователя 4, а выход через соответствующую линию связи подключен к входу АЦП сигнального процессора 1, записывая в него по линиям связи шины интерфейса соответствующие коды и устанавливая максимальный коэффициент усиления, после чего сигнальный процессор 1 приступает к инициализации датчика 6 температуры, аналогично записывая в него по шине интерфейса соответствующие коды, завершая тем самым инициализацию всего устройства. После чего сигнальный процессор 1 приступает к выполнению программы, реализующей вышеизложенный способ, выдавая результаты по интерфейсу RS - 232 через приемопередатчик 7 на выход 8.
Формат сообщения по интерфейсу RS - 232 следующий:
- первый байт - байт адреса устройства - устанавливается соответствующей командой по данному интерфейсу;
- второй байт - байт режима, при этом старший нибл - нибл режима, где в соответствующих битах указаны режимы работы устройства, а именно поиска зоны резонанса, поиска частот резонансов с заданными фазовыми сдвигами, режима захвата и фазовой автоподстройки этих частот, кроме того, режим работы по интерфейсу RS - 232: подчиненный или мастер, при этом в режим мастер устройство устанавливается соответствующей командой по данному интерфейсу, младший нибл - нибл кода неисправности, где соответствующим кодом указаны выявленные неисправности;
- третий байт - младший байт значения плотности;
- четвертый байт - старший байт значения плотности;
- пятый байт - младший байт значения вязкости;
- шестой байт - старший байт значения вязкости;
- седьмой байт - младший байт значения температуры;
- восьмой байт - старший байт значения температуры;
- девятый байт - байт контрольной суммы.
Таким образом, введение новых действий и операций, а также новых связей и элементов позволило существенно повысить точность как за счет измерения при максимально возможном входном сигнале, так и за счет компенсации температурных погрешностей, нелинейности характеристики вибрационного преобразователя и учета влияния плотности на вязкость, расширить диапазон измерения соответственно и область применения устройства за счет программно реализованной регулировки коэффициента усиления, а гармонический анализ на основе преобразования Фурье позволяет существенно повысить помехоустойчивость, кроме того, измерение вязкости позволяет расширить функциональные возможности.
Источники информации
1. Авторское свидетельство СССР на изобретение №1017971, МПК G01N 11/16, 15.01.1982.
2. Патент РФ на изобретение №2263305, МПК G01N 25/02, 27.10.2005.
3. Патент США на изобретение №4996656, МПК G01N 9/00, 26.02.1991.
4. Патент РФ на изобретение №2024841, МПК G01N 9/32, 15.12.1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ОБЛЕДЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2323131C1 |
| СПОСОБ КОНТРОЛЯ ОБЛЕДЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2392195C2 |
| СПОСОБ КОНТРОЛЯ ОБЛЕДЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2543447C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ СВЯЗИ В АБОНЕНТСКОМ ПУНКТЕ БЕСПРОВОДНОЙ СИСТЕМЫ ЭЛЕКТРОСВЯЗИ | 1990 |
|
RU2159007C2 |
| ИЗМЕРИТЕЛЬ ХАРАКТЕРИСТИК ФАЗОВЫХ ФЛУКТУАЦИЙ | 1992 |
|
RU2041469C1 |
| АБОНЕНТСКИЙ ПУНКТ В АБОНЕНТСКОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 1990 |
|
RU2138122C1 |
| Квантовый стандарт частоты с лазерной оптической накачкой | 2020 |
|
RU2747165C1 |
| АБОНЕНТСКИЙ ПУНКТ В СИСТЕМЕ БЕСПРОВОДНОЙ ЦИФРОВОЙ ТЕЛЕФОННОЙ СВЯЗИ | 1990 |
|
RU2154360C2 |
| ИЗМЕРИТЕЛЬНАЯ ЭЛЕКТРОНИКА И СПОСОБЫ ДЛЯ ГЕНЕРИРОВАНИЯ СИГНАЛА ВОЗБУЖДЕНИЯ ДЛЯ ВИБРАЦИОННОГО РАСХОДОМЕРА | 2006 |
|
RU2376556C1 |
| Интеллектуальный счетчик электрической энергии | 2021 |
|
RU2786977C2 |
Изобретение относится к точному приборостроению и может применяться для определения плотности и вязкости газообразных и жидких сред. Способ включает возбуждение непрерывных гармонических колебаний вибрационного преобразователя, помещенного в измеряемую среду, измерение температуры среды, а также измерение выходного сигнала вибрационного преобразователя с последующим вычислением плотности и вязкости. На периоде частоты возбуждения формируют выборку значений выходного сигнала вибрационного преобразователя, осуществляют контроль данных в выборке, по результатам которого производят автоподстройку коэффициента усиления и нормируют данные в выборке, вычисляют по нормированным данным коэффициенты преобразования Фурье для первой гармоники сигнала, по которым осуществляют контроль уровня помех, поиск зоны резонанса, а в зоне резонанса - захват и удержание частот резонансов с заданными фазовыми сдвигами. Устройство для реализации предложенного способа содержит сигнальный процессор 1, программируемый синтезатор 2 частоты, усилитель 3 мощности, вибрационный преобразователь 4 плотности, усилитель 5 с программируемым коэффициентом усиления, датчик 6 температуры, приемопередатчик 7 и вход-выход 8. Техническим результатом является повышение точности и помехоустойчивости, а также расширение области применения и функциональных возможностей. 2 н. и 3 з.п. ф-лы, 1 ил.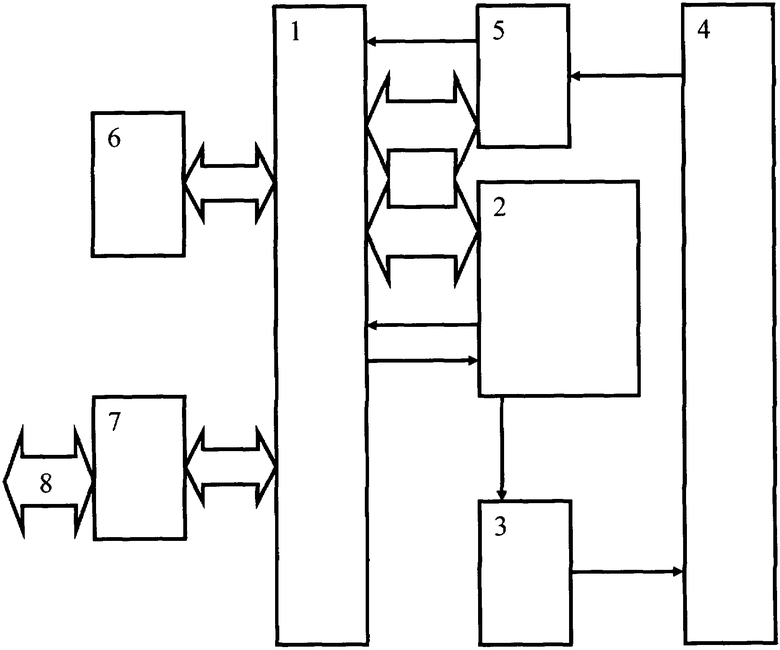
| ДИНАМИЧЕСКИЙ СПОСОБ ИССЛЕДОВАНИЯ ТЕПЛОФИЗИЧЕСКИХ СВОЙСТВ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ТЕПЛОФИЗИЧЕСКИХ СВОЙСТВ ЖИДКОСТЕЙ | 2004 |
|
RU2263305C1 |
| Вибрационный способ исследования жидкостей | 1982 |
|
SU1017971A1 |
| СПОСОБ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2069848C1 |
| US 4996656, 26.02.1991 | |||
| Устройство для измерения физико-механических характеристик жидкостей | 1980 |
|
SU957062A1 |
| РЕГУЛЯТОР ТЕПЛОВОЙ НАГРУЗКИ ПРЯМОТОЧНОГО КОТЛОАГРСГАТА | 0 |
|
SU193589A1 |

