УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к вибрационному расходомеру, а более точно - к измерительной электронике и способам для генерирования сигнала возбуждения для вибрационного расходомера.
Вибрационные трубопроводные датчики, такие как массовые расходомеры Кориолиса и вибрационные плотномеры, типично работают, регистрируя перемещения вибрирующего трубопровода, который содержит в себе текучий материал. Свойства, ассоциативно связанные с материалом в трубопроводе, такие как массовый расход, плотность и тому подобное, могут определяться посредством обработки измерительных сигналов, принятых от преобразователей движения, связанных с трубопроводом. Формы колебаний вибрирующей заполненной материалом системы обычно находятся под влиянием объединенной массы, жесткости и характеристик демпфирования вмещающего трубопровода и содержащегося в нем материала.
Типичный массовый расходомер Кориолиса включает в себя один или более трубопроводов, которые соединены в линию в магистрали или транспортной системе и транспортируют материал, например флюиды, суспензии и тому подобное, в системе. Каждый трубопровод может рассматриваться в качестве имеющего набор форм свободных колебаний, в том числе, например, формы колебаний простого изгиба, торсионную, радиальную и связанную. В типичном применении кориолисова измерения массового расхода трубопровод возбуждается на одной или более форм колебаний, в то время как материал протекает через трубопровод, и движение трубопровода измеряется в точках, разнесенных по трубопроводу. Возбуждение типично обеспечивается исполнительным механизмом, например электромеханическим устройством, таким как возбудитель типа звуковой катушки, который периодически возмущает трубопровод. Удельный массовый расход может определяться измерением запаздывания или разности фаз между движениями в местоположениях преобразователей. Два таких преобразователя (или датчика измерителя) типично применяются для того, чтобы измерять колебательный ответный сигнал проточного трубопровода или трубопроводов, и типично расположены в положениях выше по потоку и ниже по потоку от исполнительного механизма. Два датчика измерителя присоединены к электронной измерительной аппаратуре проводкой. Измерительная аппаратура принимает сигналы от двух датчиков измерителей и обрабатывает сигналы для того, чтобы получать результат измерения удельного массового расхода.
В дополнение к генерированию измерений параметров потока электроника расходомера также должна генерировать сигнал возбуждения. Сигнал возбуждения должен оптимально возбуждать вибрацию расходомера на или около частоты, которая обеспечивает возможность точных измерений характеристик потока. В дополнение, сигнал возбуждения должен обеспечивать возможность быстрого и надежного запуска вибрации. Более того, сигнал возбуждения должен обеспечивать возможность точных и своевременных диагностических операций расходомера.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеприведенные и другие задачи решаются, и прогресс в данной области техники достигается благодаря предоставлению измерительной электроники и способов для генерирования сигнала возбуждения для вибрационного расходомера.
Предложена измерительная электроника для генерирования сигнала возбуждения для вибрационного расходомера согласно варианту осуществления изобретения. Измерительная электроника содержит интерфейс для приема сигнала датчика от вибрационного расходомера и систему обработки данных, связанную с интерфейсом. Система обработки данных сконфигурирована для приема сигнала датчика, сдвига по фазе сигнала датчика по существу на 90 градусов для создания сдвинутого по фазе сигнала датчика, определения значения (θ) фазового сдвига по частотной характеристике вибрационного расходомера и объединения значения (θ) фазового сдвига с сигналом датчика и сдвинутым по фазе сигналом датчика для того, чтобы генерировать сигнал возбуждения. Система обработки данных дополнительно сконфигурирована для определения амплитуды сигнала датчика по сигналу датчика и сдвинутому по фазе сигналу датчика и генерирования амплитуды сигнала возбуждения на основании амплитуды сигнала датчика. Фаза сигнала возбуждения по существу идентична фазе сигнала датчика.
Предложен способ для генерирования сигнала возбуждения для вибрационного расходомера согласно варианту осуществления изобретения. Способ содержит этапы, на которых принимают сигнал датчика от вибрационного расходомера. Способ дополнительно содержит этап, на котором сдвигают по фазе сигнал датчика по существу на 90 градусов для создания сдвинутого по фазе сигнала датчика, определяют амплитуду сигнала датчика по сигналу датчика и сдвинутому по фазе сигналу датчика, и формируют амплитуду сигнала возбуждения на основании амплитуды сигнала датчика. Способ дополнительно содержит этап, на котором формируют сигнал возбуждения, включающий амплитуду сигнала возбуждения.
Предложен способ для формирования сигнала возбуждения для вибрационного расходомера согласно варианту осуществления изобретения. Способ содержит этапы, на которых принимают сигнал датчика от вибрационного расходомера, сдвигают по фазе сигнал датчика по существу на 90 градусов для создания сдвинутого по фазе сигнала датчика, и определяют значение (θ) фазового сдвига по частотной характеристике вибрационного расходомера. Способ дополнительно содержит этап, на котором объединяют значение (θ) фазового сдвига с сигналом датчика и сдвинутым по фазе сигналом датчика, для того чтобы генерировать сигнал возбуждения. Фаза сигнала возбуждения по существу идентична фазе сигнала датчика.
Предложен способ для формирования сигнала возбуждения для вибрационного расходомера согласно варианту осуществления изобретения. Способ содержит этапы, на которых принимают сигнал датчика от вибрационного расходомера, сдвигают по фазе сигнал датчика по существу на 90 градусов для создания сдвинутого по фазе сигнала датчика, определяют значение (θ) фазового сдвига по частотной характеристике вибрационного расходомера и объединяют значение (θ) фазового сдвига с сигналом датчика и сдвинутым по фазе сигналом датчика, для того чтобы генерировать сигнал возбуждения. Способ дополнительно содержит этап, на котором определяют амплитуду сигнала датчика по сигналу датчика и сдвинутому по фазе сигналу датчика и генерируют амплитуду сигнала возбуждения на основании амплитуды сигнала датчика. Фаза сигнала возбуждения по существу идентична фазе сигнала датчика.
АСПЕКТЫ ИЗОБРЕТЕНИЯ
В одном из аспектов измерительной электроники, сдвиг по фазе выполняется посредством преобразования Гильберта.
В еще одном аспекте измерительной электроники, значение (θ) фазового сдвига содержит значение компенсации.
В другом аспекте измерительной электроники, определение значения (θ) фазового сдвига содержит осуществление линейной корреляции частотной характеристики с отношением частота/фаза для того, чтобы вырабатывать значение (θ) фазового сдвига.
В другом аспекте измерительной электроники, определение амплитуды сигнала датчика содержит прием члена Acosωt, представляющего сигнал датчика, генерирование члена Asinωt из фазового сдвига, возведение в квадрат члена Acosωt и члена Asinωt и извлечение квадратного корня из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt, для того чтобы определять амплитуду сигнала датчика.
В другом аспекте измерительной электроники, генерирование амплитуды сигнала возбуждения дополнительно содержит сравнение амплитуды сигнала датчика с базой отсчета амплитуды и масштабирование амплитуды сигнала датчика, для того чтобы генерировать амплитуду сигнала возбуждения, причем масштабирование является основанным на сравнении амплитуды сигнала датчика с базой отсчета амплитуды.
В другом аспекте измерительной электроники, система обработки данных дополнительно сконфигурирована для осуществления частотной линейной модуляции сигнала возбуждения при вводе расходомера в действие.
В другом аспекте измерительной электроники, система обработки данных дополнительно сконфигурирована для осуществления частотной линейной модуляции сигнала возбуждения при вводе расходомера в действие, причем осуществление частотной линейной модуляции содержит ступенчатое качание частоты через два или более частотных диапазонов до тех пор, пока расходомер не запускается.
В другом аспекте измерительной электроники, система обработки данных дополнительно сконфигурирована для линеаризации сигнала возбуждения.
В другом аспекте измерительной электроники, система обработки данных дополнительно сконфигурирована для расчета второй амплитуды с использованием пикового детектирования, сравнения амплитуды сигнала датчика со второй амплитудой и детектирования широкополосного шума на датчике измерителя, если вторая амплитуда выше, чем амплитуда сигнала датчика.
В одном из аспектов способа, сдвиг по фазе выполняется посредством преобразования Гильберта.
В еще одном другом аспекте способа, способ дополнительно содержит определение амплитуды сигнала датчика по сигналу датчика и сдвинутому по фазе сигналу датчика, генерирование амплитуды сигнала возбуждения на основании амплитуды сигнала датчика и включение амплитуды сигнала возбуждения в сигнал возбуждения.
В еще одном другом аспекте способа, определение амплитуды сигнала датчика содержит прием члена Acosωt, представляющего сигнал датчика, генерирование члена Asinωt из фазового сдвига, возведение в квадрат члена Acosωt и члена Asinωt и извлечение квадратного корня из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt, для того чтобы определять амплитуду сигнала датчика.
В еще одном другом аспекте способа, формирование амплитуды сигнала возбуждения дополнительно содержит сравнение амплитуды сигнала датчика с базой отсчета амплитуды и масштабирование амплитуды сигнала датчика, для того чтобы сформировать амплитуду сигнала возбуждения, причем масштабирование является основанным на сравнении амплитуды сигнала датчика с базой отсчета амплитуды.
В еще одном другом аспекте способа, способ дополнительно содержит прием члена Acosωt, представляющего сигнал датчика, генерирование члена Asinωt из фазового сдвига, возведение в квадрат члена Acosωt и члена Asinωt, извлечение квадратного корня из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt, для того чтобы определять амплитуду сигнала датчика, генерирование амплитуды сигнала возбуждения на основании амплитуды сигнала датчика и включение амплитуды сигнала возбуждения в сигнал возбуждения.
В еще одном другом аспекте способа, способ дополнительно содержит прием члена Acosωt, представляющего сигнал датчика, генерирование члена Asinωt из фазового сдвига, возведение в квадрат члена Acosωt и члена Asinωt, извлечение квадратного корня из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt, для того чтобы определять амплитуду сигнала датчика, сравнение амплитуды сигнала датчика с базой отсчета амплитуды, масштабирование амплитуды сигнала датчика, для того чтобы сформировать амплитуду сигнала возбуждения, причем масштабирование является основанным на сравнении амплитуды сигнала датчика с базой отсчета амплитуды, и включение амплитуды сигнала датчика в сигнал возбуждения.
В еще одном другом аспекте способа, способ дополнительно содержит определение значения (θ) фазового сдвига по частотной характеристике колебательного расходомера, объединение значения (θ) фазового сдвига с сигналом датчика и сдвинутым по фазе сигналом датчика, для того чтобы генерировать фазу сигнала возбуждения, и включение фазы сигнала возбуждения в сигнал возбуждения, при этом фаза сигнала возбуждения по существу идентична фазе сигнала датчика.
В еще одном другом аспекте способа, значение (θ) фазового сдвига содержит значение компенсации.
В еще одном другом аспекте способа, определение значения (θ) фазового сдвига содержит осуществление линейной корреляции частотной характеристики с отношением частота/фаза для того, чтобы вырабатывать значение (θ) фазового сдвига.
В еще одном другом аспекте способа, способ дополнительно содержит осуществление линейной корреляции частотной характеристики с отношением частота/фаза, для того чтобы вырабатывать значение (θ) фазового сдвига, объединение значения (θ) фазового сдвига с сигналом датчика и сдвинутым по фазе сигналом датчика, для того чтобы генерировать фазу сигнала возбуждения, и включение фазы сигнала возбуждения в сигнал возбуждения, при этом фаза сигнала возбуждения по существу идентична фазе сигнала датчика.
В еще одном другом аспекте способа, способ дополнительно содержит осуществление частотной линейной модуляции сигнала возбуждения при вводе расходомера в действие.
В еще одном другом аспекте способа, способ дополнительно содержит осуществление частотной линейной модуляции сигнала возбуждения при вводе расходомера в действие, причем осуществление частотной линейной модуляции содержит ступенчатое качание частоты через два или более частотных диапазонов до тех пор, пока расходомер не запускается.
В еще одном другом аспекте способа, способ дополнительно содержит линеаризацию сигнала возбуждения.
В еще одном другом аспекте способа, способ дополнительно содержит расчет второй амплитуды с использованием пикового детектирования, сравнение амплитуды сигнала датчика со второй амплитудой и регистрирование широкополосного шума на датчике перемещений, если вторая амплитуда выше, чем амплитуда сигнала датчика.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Один и тот же номер позиции на чертежах представляет идентичный элемент на всех чертежах.
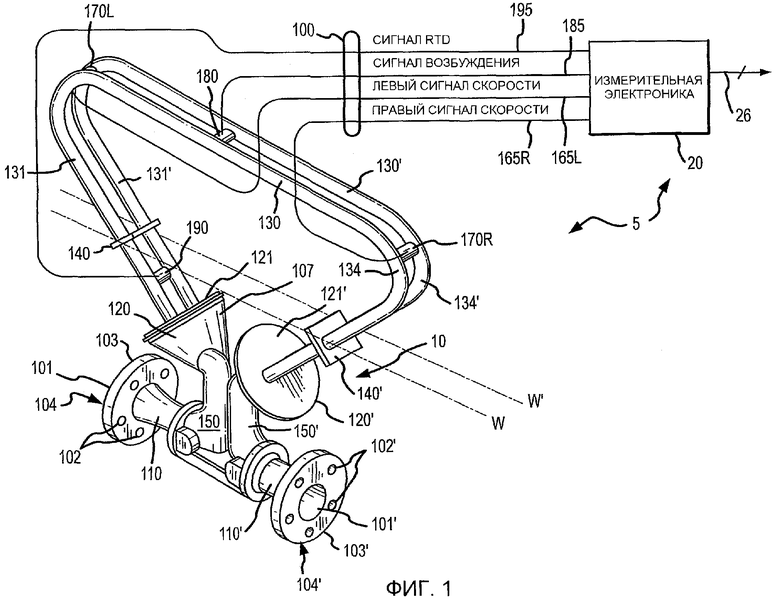
На Фиг.1 показан расходомер Кориолиса, содержащий измерительную сборку и измерительную электронику.
На Фиг.2 показана измерительная электроника согласно варианту осуществления изобретения.
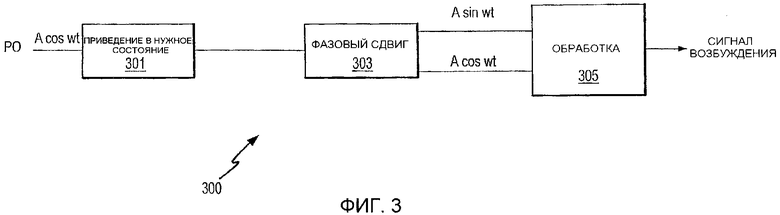
На Фиг.3 показан узел сигнала возбуждения измерительной электроники согласно варианту осуществления изобретения.
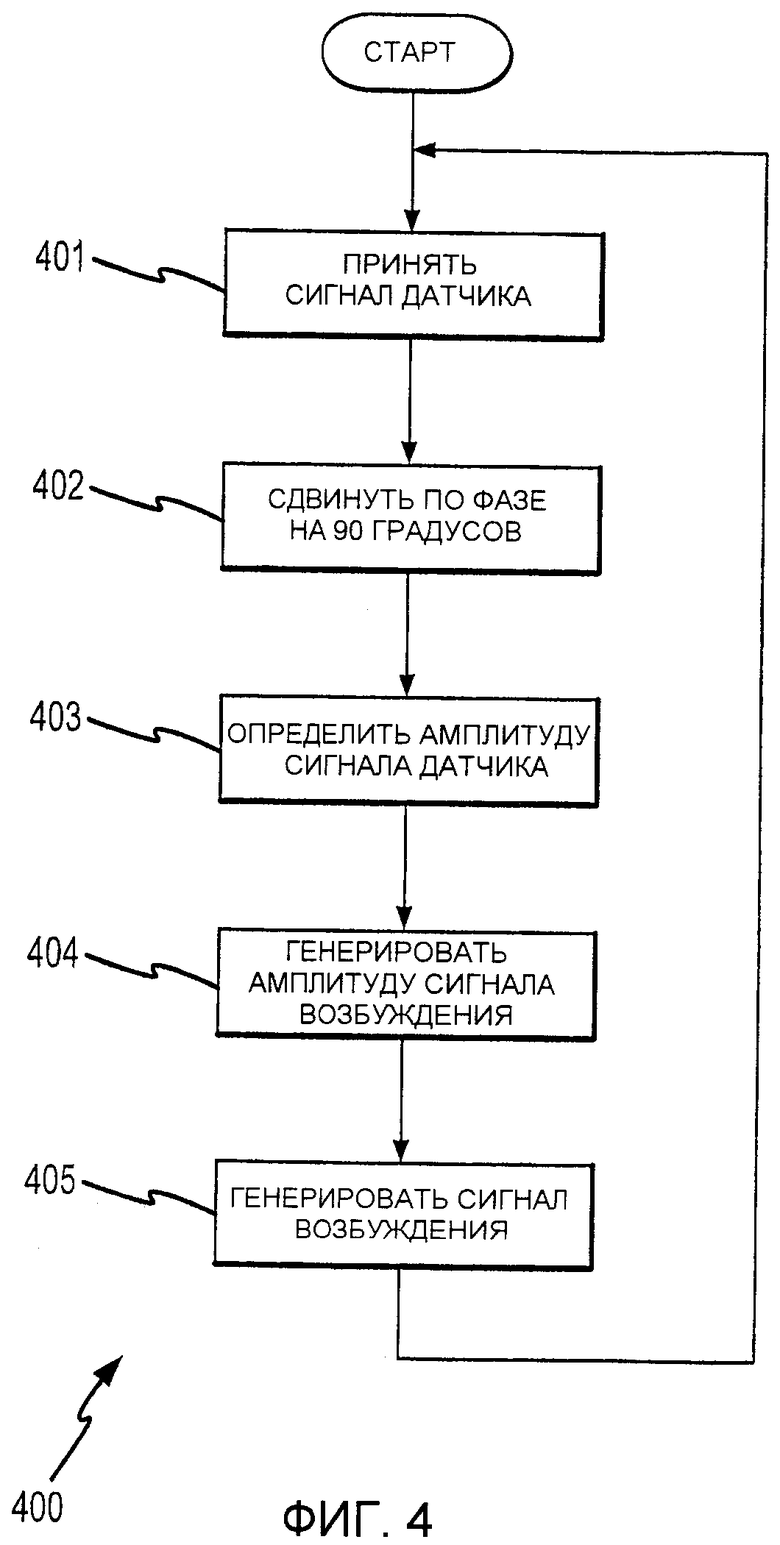
На Фиг.4 - блок-схема последовательности операций способа для генерирования сигнала возбуждения для колебательного расходомера согласно варианту осуществления изобретения.
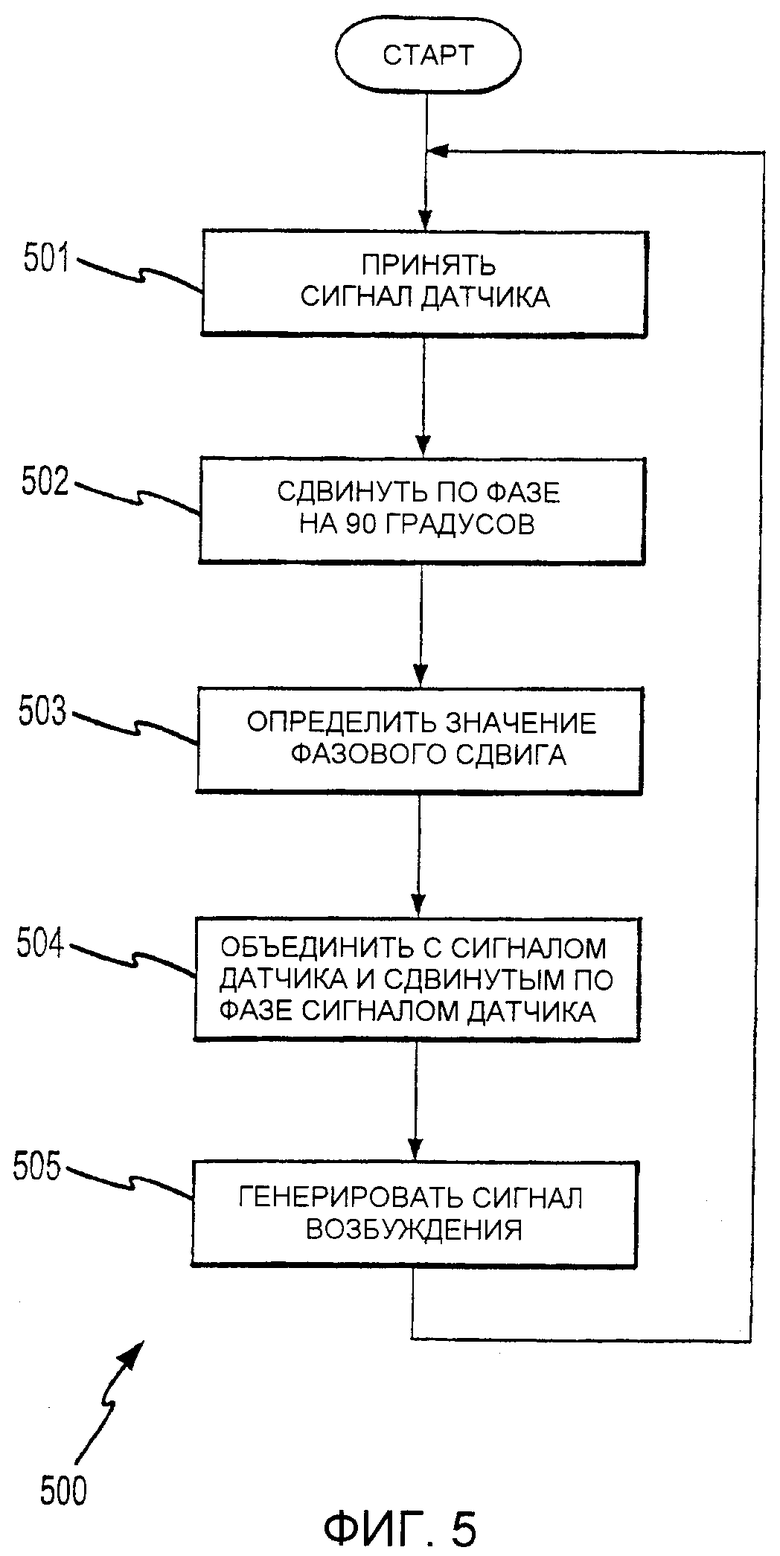
На Фиг.5 - блок-схема последовательности операций способа для генерирования сигнала возбуждения для колебательного расходомера согласно варианту осуществления изобретения.
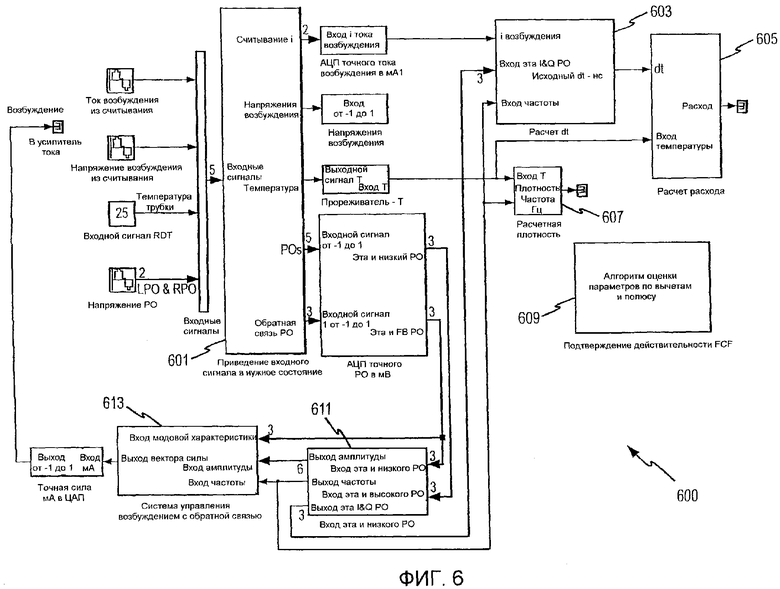
На Фиг.6 - структурная схема цифрового возбуждения с замкнутым контуром согласно варианту осуществления изобретения.
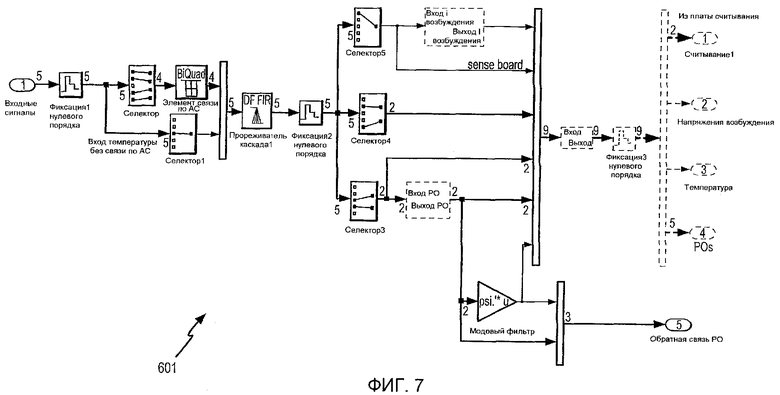
На Фиг.7 показан блок приведения в нужное состояние входного сигнала согласно варианту осуществления изобретения.
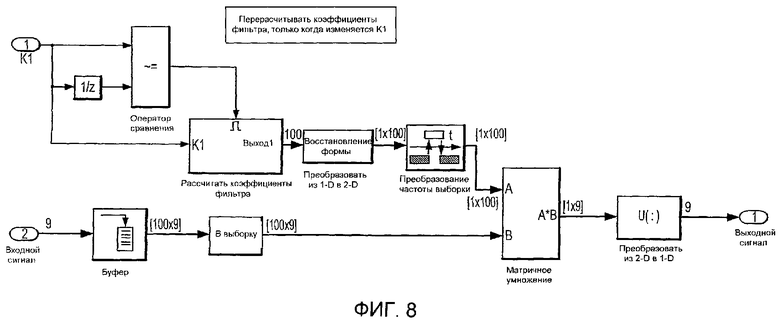
На Фиг.8 показана реализация настраиваемого идеального фильтра нижних частот порядка N=100, размноженного с окном Хенинга для создания фильтра нижних частот с конечной импульсной характеристикой (КИХ, FIR).
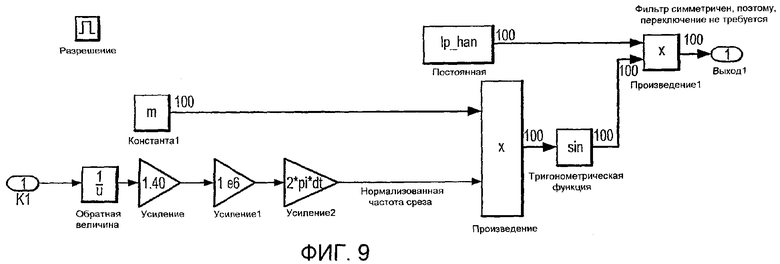
На Фиг.9 показана задействованная подсистема для расчета коэффициентов для фильтра по Фиг.8.
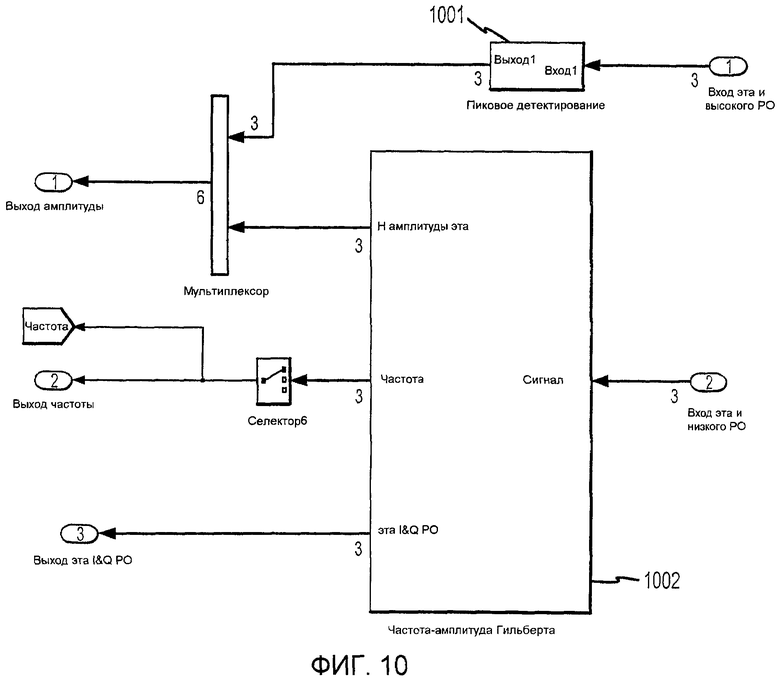
На Фиг.10 показан блок расчета частоты-амплитуды согласно варианту осуществления изобретения.
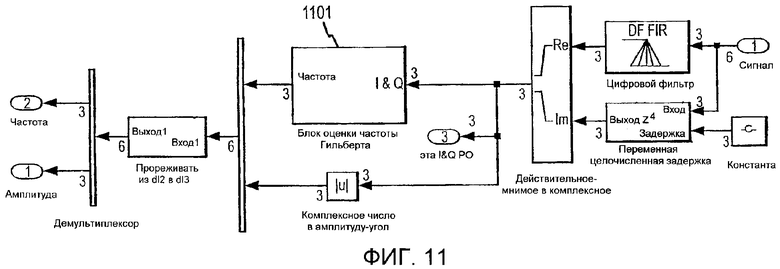
На Фиг.11 показан блок частоты-амплитуды Гильберта согласно варианту осуществления изобретения.
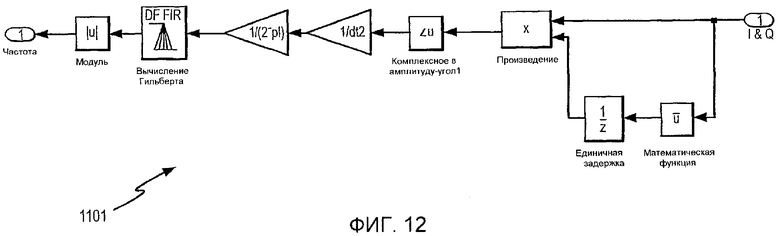
На Фиг.12 показан блок оценки частоты Гильберта согласно варианту осуществления изобретения.
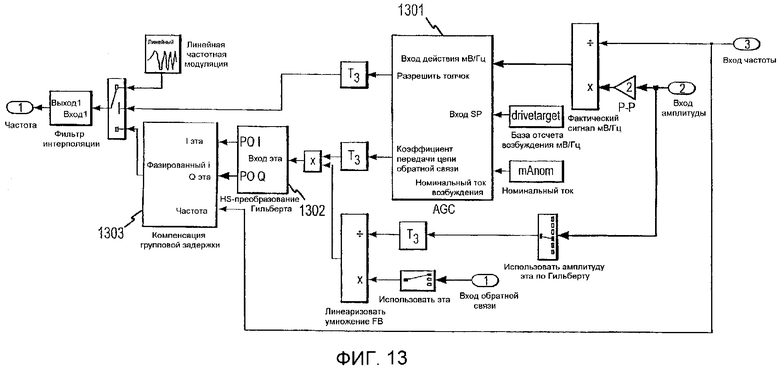
На Фиг.13 показан блок системы управления возбуждением с обратной связью согласно варианту осуществления изобретения.
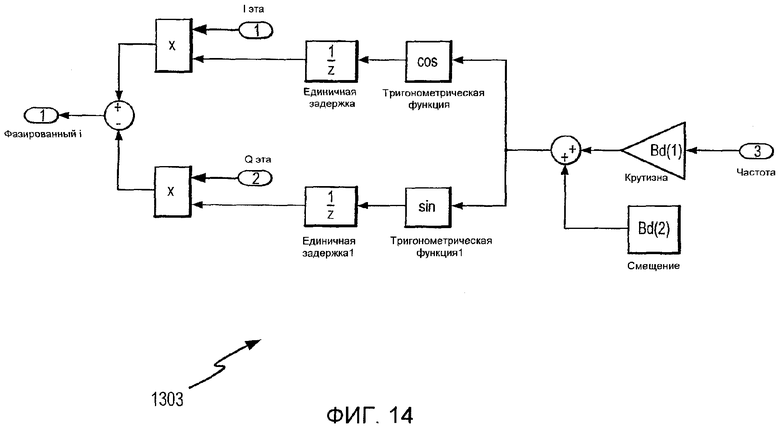
На Фиг.14 показан блок компенсации групповой задержки согласно варианту осуществления изобретения.
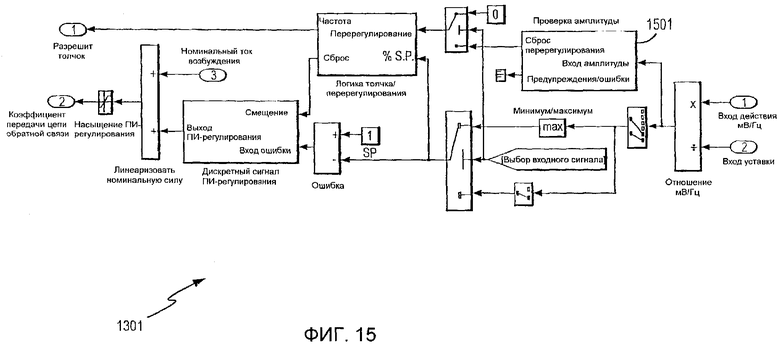
На Фиг.15 показан блок автоматической регулировки усиления (АРУ, AGC) согласно варианту осуществления изобретения.
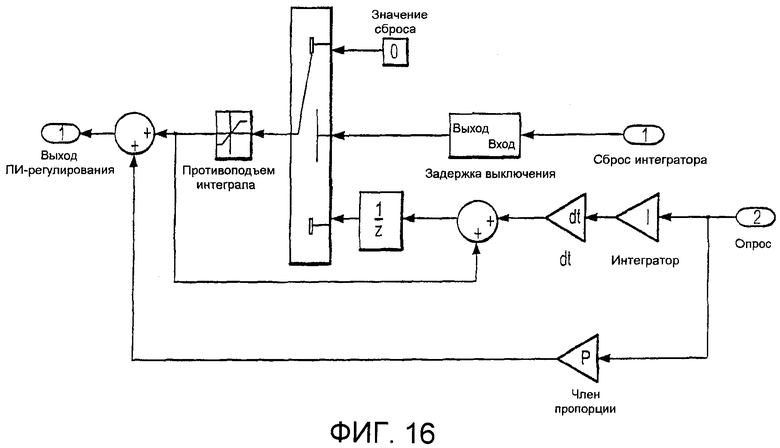
На Фиг.16 показан пропорционально-интегральный (ПИ, PI) регулятор согласно варианту осуществления изобретения.
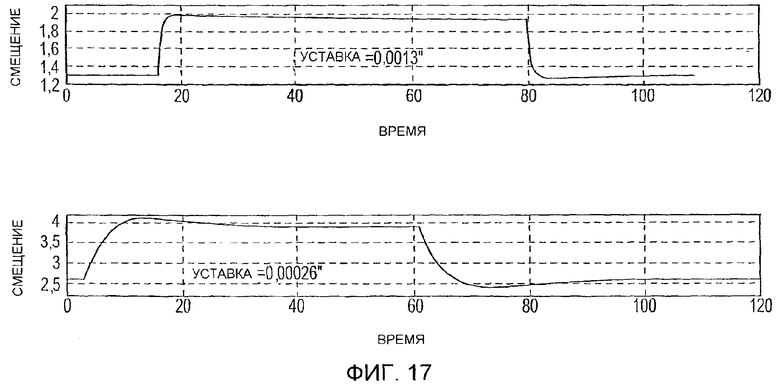
Фиг.17 включает в себя три графика сигнала возбуждения, которые представляют работу расходомерной трубки в предшествующем уровне техники.
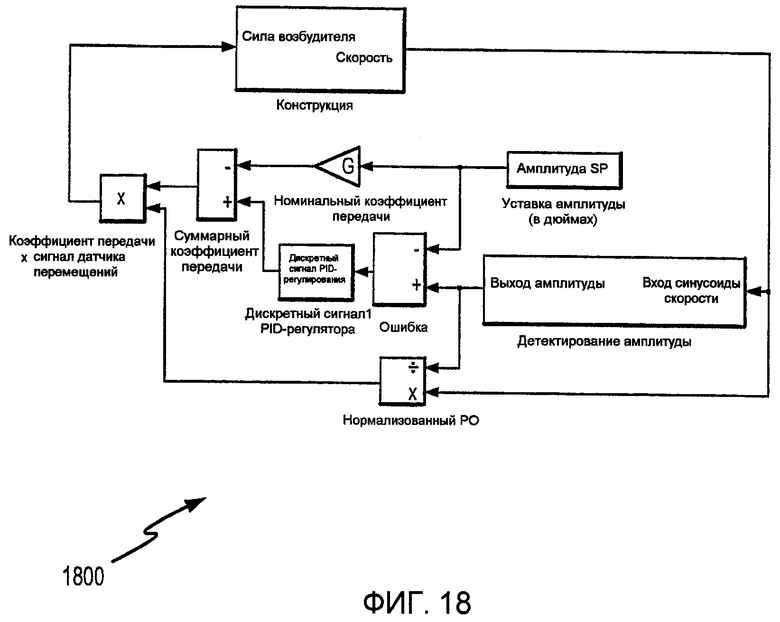
На Фиг.18 показана структурная схема линеаризованного управления возбуждением согласно варианту осуществления изобретения.
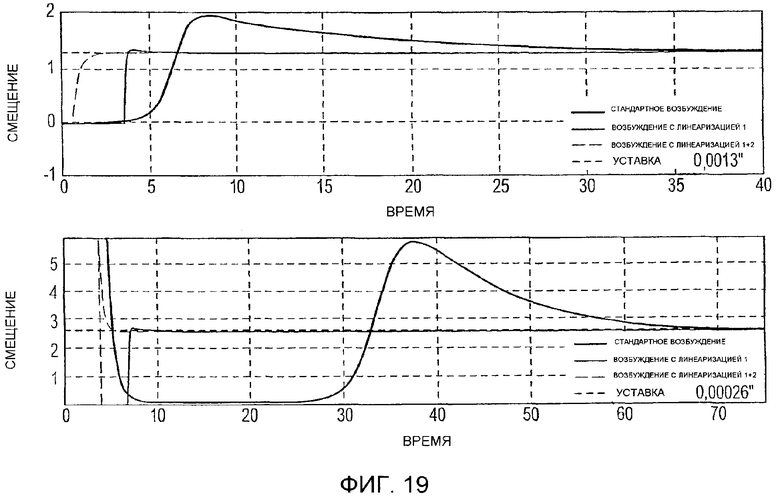
Фиг.19 содержит графики линеаризованного управления возбуждением согласно варианту осуществления изобретения.
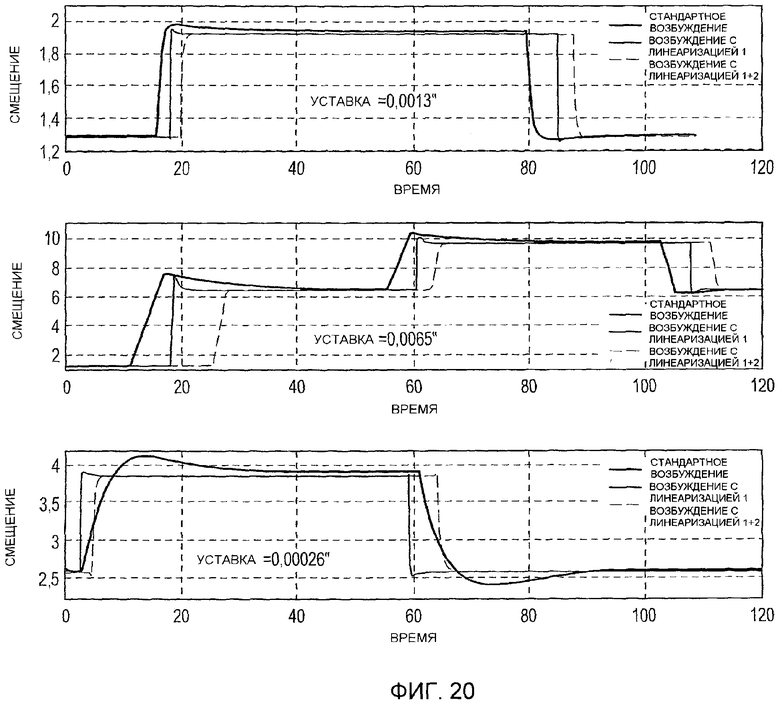
Фиг.20 содержит графики, которые показывают независимость амплитуды заданного значения линеаризованного контура возбуждения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На Фиг.1-20 и в последующем описании описаны отдельные примеры для обучения специалистов в данной области техники, каким образом реализовать и использовать наилучший вариант осуществления изобретения. Для цели изучения обладающих признаками изобретения принципов, некоторые традиционные аспекты были упрощены или опущены. Специалисты в данной области техники должны принимать во внимание варианты из этих примеров, которые подпадают под объем изобретения. Специалисты в данной области техники должны принимать во внимание, что признаки, описанные ниже, могут комбинироваться различными способами для формирования многочисленных вариантов изобретения. Как результат, изобретение не ограничено отдельными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
На Фиг.1 показан расходомер 5 Кориолиса, содержащий измерительную сборку 10 и измерительную электронику 20. Измерительная сборка 10 реагирует на удельный массовый расход и плотность технологического материала. Измерительная электроника 20 присоединена к измерительной сборке 10 посредством провода 100 для предоставления информации о плотности, удельном массовом расходе и температуре через цепь 26, а также другой информации, не относящейся к настоящему изобретению. Описана конструкция расходомера Кориолиса, хотя специалистам в данной области техники очевидно, что настоящее изобретение могло бы быть осуществлено на практике в качестве вибрационного трубчатого плотномера без дополнительной возможности измерения, предусмотренной массовым расходомером Кориолиса.
Измерительная сборка 10 включает в себя пару патрубков 150 и 150', фланцы 103 и 103', имеющие горловины 110 и 110' фланцев, пару параллельных расходомерных трубок 130 и 130', механизм 180 возбуждения, датчик 190 температуры и пару датчиков 170L и 170R скорости. Расходомерные трубки 130 и 130' содержат два по существу прямых впускных колена 131 и 131' и выпускных колена 134 и 134', которые сходятся по направлению друг к другу на блоках 120 и 120' монтажа расходомерной трубки. Расходомерные трубки 130 и 130' согнуты на двух симметричных участках по своей длине и по существу параллельны по всей своей длине. Планки 140 и 140' ребер жесткости служат для определения осей W и W', около которых вибрирует каждая расходомерная трубка.
Боковые колена 131, 131' и 134, 134' расходомерных трубок 130 и 130' зафиксированы на блоках 120 и 120' монтажа расходомерных трубок, а эти блоки, в свою очередь, зафиксированы на патрубках 150 и 150'. Это обеспечивает непрерывный замкнутый тракт материала через измерительную сборку 10 Кориолиса.
Когда фланцы 103 и 103', имеющие отверстия 102 и 102', присоединены через впускной конец 104 и выпускной конец 104' к технологической линии (не показана), которая переносит технологический материал, который подвергается измерению, материал, который входит в конец 104 измерителя через отверстие 101 во фланце 103, проводится через патрубок 150 в блок 120 монтажа расходомерной трубки, имеющий поверхность 121. В пределах патрубка 150 материал разделяется и направляется через расходомерные трубки 130 и 130'. После выхода из расходомерных трубок 130 и 130', технологический материал повторно объединяется в единый поток в патрубке 150', а после этого направляется к выходному концу 104', присоединенному фланцем 103', имеющим болтовые отверстия 102', к технологической линии (не показана).
Расходомерные трубки 130 и 130' выбираются и надлежащим образом устанавливаются на блоки 120 и 120' монтажа расходомерных трубок, с тем чтобы иметь по существу одинаковое распределение масс, моменты инерции и модуль Юнга вокруг осей W--W и W'--W' изгиба, соответственно. Эти оси изгиба проходят через планки 140 и 140' ребер жесткости. Поскольку модуль Юнга расходомерных трубок меняется в зависимости от температуры, и это изменение затрудняет расчет расхода и плотности, резистивный термодатчик (RTD) 190 установлен на расходомерную трубке 130', чтобы непрерывно измерять температуру расходомерной трубки. Температура расходомерной трубки, а следовательно, напряжение, появляющееся на выводах RTD для заданного тока, проходящего через него, обусловлены температурой материала, проходящего через расходомерную трубку. Зависимое от температуры напряжение, появляющееся на выводах RTD, используется, широко известным способом, измерительной электроникой 20 для компенсации изменения модуля упругости расходомерных трубок 130 и 130', обусловленного любыми изменениями температуры расходомерной трубки. RTD присоединен к измерительной электронике 20 проводом 195.
Обе расходомерные трубки 130 и 130' приводятся в движение возбудителем 180 в противоположных направлениях около своих соответственных осей W и W' изгиба, чем показана первая несинфазная форма колебаний изгиба расходомера. Этот механизм 180 возбуждения может содержать любую из многочисленных широко известных компоновок, таких как магнит, установленный на расходомерную трубку 130', и противостоящая катушка, установленная на расходомерную трубку 130, и через которую пропускается переменный ток для вибрации обеих расходомерных трубок. Подходящий сигнал возбуждения подается измерительной электроникой 20 через провод 185 в механизм 180 возбуждения.
Измерительная электроника 20 принимает сигнал температуры RTD по проводу 195, а также левый и правый сигналы скорости, появляющиеся на проводах 165L и 165R, соответственно. Измерительная электроника 20 вырабатывает сигнал возбуждения, появляющийся на проводе 185, чтобы приводить в действие элемент 180 и заставлять колебаться трубки 130 и 130'. Измерительная электроника 20 обрабатывает левый и правый сигналы скорости и сигнал RTD, чтобы вычислять удельный массовый расход и плотность материала, проходящего через измерительную сборку 10. Эта информация, наряду с другой информацией, подается измерительной электроникой 20 через цепь 26 на средство 29 использования.
На Фиг.2 показана измерительная электроника 20 согласно варианту осуществления изобретения. Измерительная электроника 20 может включать в себя интерфейс 201 и систему 203 обработки данных. Измерительная электроника 20 принимает сигналы первого и второго датчиков из измерительной сборки 10, такие как сигналы датчика измерителя/скорости. Измерительная электроника 20 может работать как массовый расходомер или может работать как плотномер, включая работу в качестве расходомера Кориолиса. Измерительная электроника 20 обрабатывает сигналы первого и второго датчиков для того, чтобы получать характеристики потока проточного материала, протекающего через измерительную сборку 10. Например, измерительная электроника 20 может определять одно или более из разности фаз, частоты, разновременности (∆t), плотности, удельного массового расхода и удельного объемного расхода, например, по сигналам датчиков. В дополнение, измерительная электроника 20 может формировать сигнал возбуждения и подавать сигнала возбуждения на возбудитель 180 измерительной сборки 10 (см. Фиг.1). Более того, другие характеристики потока могут определяться согласно изобретению. Эти определения обсуждены ниже.
Интерфейс 201 принимает сигнал датчика от одного из датчиков 170L и 170R скорости через провода 100 по Фиг.1. Интерфейс 201 может выполнять любое необходимое или желательное приведение сигналов в нужное состояние, такое как любой способ форматирования, усиления, буферизации и т.п.В качестве альтернативы, некоторые или все из приведений сигналов в нужное состояние могут выполняться в системе 203 обработки данных. В дополнение, интерфейс 201 может обеспечивать возможность связи между измерительной электроникой 20 и внешними устройствами. Интерфейс 201 может быть обеспечен любой способ электронной, оптической или беспроводной связи.
Интерфейс 201, в одном из вариантов осуществления, может включать в себя дискретизатор (не показан), при этом сигнал датчика содержит аналоговый сигнал датчика. Дискретизатор производит выборку и оцифровывает аналоговый сигнал датчика, и вырабатывает цифровой сигнал датчика. Дискретизатор также может выполнять любое необходимое прореживание, при этом цифровой сигнал датчика прореживают для того, чтобы сократить объем требуемой сигнальной обработки и уменьшить время обработки.
Система 203 обработки данных управляет операциями измерительной электроники 20 и обрабатывает измерения параметров потока из сборки 10 расходомера. Система 203 обработки данных выполняет одну или более процедур обработки и, в силу этого, обрабатывает измерения параметров потока, для того чтобы выводить одну или более характеристик потока.
Система 203 обработки данных может содержать компьютер общего применения, микропроцессорную систему, логическую схему или некоторое другое устройство обработки общего применения или изготовленное по специальным требованиям заказчика. Система 203 обработки данных может быть распределена между многочисленными устройствами обработки. Система 203 обработки данных может включать в себя любой вид интегрального или независимого электронного запоминающего носителя, такого как система 204 хранения.
Система 203 обработки обрабатывает сигнал 210 датчика, для того чтобы, среди прочего, генерировать сигнал возбуждения. Сигнал возбуждения подается на возбудитель 180, для того чтобы вызывать вибрацию связанной расходомерной трубки или трубок, таких как расходомерные трубки 130 и 130' по Фиг.1.
В показанном варианте осуществления, система 203 обработки данных определяет сигнал возбуждения по сигналу 210 датчика и по девяностоградусному фазовому сдвигу 211, который вырабатывается из сигнала 210 датчика. Система 203 обработки данных может определять по меньшей мере фазовый угол сигнала возбуждения и амплитуду сигнала возбуждения по сигналу 210 датчика и фазовому сдвигу 213. Как результат, либо первый или второй сдвинутый по фазе сигнал датчика (такой как один из сигналов датчиков измерителя выше по потоку или ниже по потоку), либо комбинация этих двух может обрабатываться системой 203 обработки данных согласно изобретению, для того чтобы генерировать сигнал возбуждения.
Система 204 хранения может хранить параметры расходомера и данные, процедуры программного обеспечения, постоянные значения и переменные значения. В одном из вариантов осуществления, система 204 хранения включает в себя процедуры, которые выполняются системой 203 обработки данных. В одном из вариантов осуществления, система 204 хранения хранит процедуру 220 фазового сдвига, процедуру 221 приведения сигнала в нужное состояние, процедуру 222 фазового угла и процедуру 223 амплитуды среди прочих процедур.
В одном из вариантов осуществления, система 204 хранения хранит данные и переменные, используемые для эксплуатации расходомера, такого как расходомер 5 Кориолиса. Система 204 хранения, в одном из вариантов осуществления, хранит переменные, такие как сигнал 210 датчика, которые принимаются с одного из датчиков 170L и 170R скорости/измерителя, и хранит 90-градусный фазовый сдвиг 211, который генерируется из сигнала 210 датчика. В дополнение, система 204 хранения может хранить фазу 212 сигнала датчика, фазу 213 сигнала возбуждения, амплитуду 214 сигнала датчика, амплитуду 215 сигнала возбуждения и базу 216 отсчета амплитуды.
Процедура 220 фазового сдвига выполняет 90-градусный фазовый сдвиг над входным сигналом, то есть над сигналом 210 датчика. Процедура 220 фазового сдвига, в одном из вариантов осуществления, реализует преобразование Гильберта (обсуждено ниже). Процедура 220 фазового сдвига может генерировать 90-градусный фазовый сдвиг 211.
Процедура 221 приведения сигнала в нужное состояние выполняет приведение сигнала в нужное состояние над сигналом 210 датчика. Приведение сигнала в нужное состояние может включать в себя любой вид фильтрации, прореживания и т.п. Процедура 221 приведения сигнала в нужное состояние является необязательной процедурой.
Процедура 222 фазового угла определяет фазу 212 сигнала датчика у сигнала 210 датчика. В дополнение, процедура 222 фазового угла определяет фазу 213 сигнала возбуждения, при этом фаза 213 сигнала возбуждения по существу идентична фазе 212 сигнала датчика. Процедура 222 фазового угла, поэтому, может прибавлять или вычитать значение (θ) фазового угла к сигналу 210 датчика, для того чтобы согласовывать фазу сигнала 210 датчика.
Процедура 223 амплитуды определяет амплитуду 214 сигнала датчика у сигнала 210 датчика. В дополнение, процедура 223 амплитуды определяет амплитуду 215 сигнала возбуждения, при этом амплитуда 215 сигнала возбуждения основана на амплитуде 214 сигнала датчика. Амплитуда 215 сигнала датчика может быть большей или меньшей, чем амплитуда 214 сигнала датчика. В одном из вариантов осуществлении, амплитуду 214 сигнала датчика сравнивают с базой 216 амплитуды, для того чтобы определять величину, на которую амплитуда 215 сигнала возбуждения должна быть увеличена или уменьшена в масштабе. Поэтому процедура 223 амплитуды определяет амплитуду 215 сигнала возбуждения для сигнала возбуждения.
Фаза 212 сигнала датчика является измеренным или рассчитанным фазовым углом сигнала 210 датчика. Фаза 212 сигнала датчика определяется для того, чтобы устанавливать надлежащую согласующуюся фазу 213 сигнала возбуждения. Фаза 213 сигнала возбуждения, поэтому, по существу идентична фазе 212 сигнала датчика.
Амплитуда 214 сигнала датчика является измеренной или рассчитанной амплитудой сигнала 210 датчика. Амплитуда сигнала датчика определяется для того, чтобы определять амплитуду 215 сигнала возбуждения. Амплитуда 215 сигнала возбуждения основана на амплитуде 214 сигнала датчика, хотя амплитуда 215 сигнала возбуждения может отклоняться от амплитуды 214 сигнала датчика.
База 216 отсчета амплитуды является требуемой амплитудой вибрационного датчика для нормальной или предпочтительной работы расходомера 5. В одном из вариантов осуществления, база 216 отсчета амплитуды содержит пороговое значение минимальной амплитуды, при этом амплитуда 214 сигнала датчика будет увеличиваться системой 202 обработки данных, если амплитуда 214 сигнала датчика не превышает базу 216 отсчета амплитуды. Поэтому амплитуда 215 сигнала возбуждения может делаться большей, чем амплитуда 214 сигнала датчика, если амплитуда 214 сигнала датчика не превышает это пороговое значение минимальной амплитуды. В качестве альтернативы, база 216 отсчета амплитуды может содержать динамический диапазон, при этом амплитуда 215 сигнала возбуждения содержит увеличенный в масштабе или уменьшенный в масштабе вариант амплитуды 214 сигнала датчика.
Фиг.3 показывает узел 300 сигнала возбуждения измерительной электроники 20 согласно варианту осуществления изобретения. Узел 300 сигнала возбуждения может содержать схемные компоненты или может содержать действия обработки, выполняемые над данными, принятыми измерительной электроникой 20.
Узел 300 сигнала возбуждения, среди прочего, может включать в себя блок 301 приведения в нужное состояние, блок 303 фазового сдвига и блок 305 обработки. Сигнал датчика принимается в блоке 301 приведения в нужное состояние. Сигнал датчика может содержать либо сигнал 170L или 170R датчика смещения измерительной сборки 10, либо сочетание этих двух сигналов. Блок 301 приведения в нужное состояние может выполнять любой вид приведения сигналов в нужное состояние. Например, блок 301 приведения в нужное состояние может выполнять фильтрацию, прореживание и т.п.
Блок 303 фазового сдвига принимает сигнал датчика от блока 301 приведения в нужное состояние и сдвигает по фазе сигнал датчика по существу на 90 градусов. Сдвинутый сигнал датчика содержит несдвинутую составляющую, представленную членом (Acosωt) и сдвинутую по фазе составляющую, представленную членом (Asinωt), где ω является частотой датчика в радианах (см. уравнение 2, приведенное ниже).
В одном из вариантов осуществления, блок 303 сдвига фазы содержит преобразование Гильберта. Преобразование Гильберта выполняет операцию сдвига по фазе задерживанием сигнала датчика на время, эквивалентное 90 градусам (или одной четверти периода волны).
Блок 305 обработки принимает сигнал датчика и сдвинутый по фазе сигнал датчика и формирует сигнал возбуждения из этих двух входных сигналов. Блок 305 обработки может формировать выход сигнала возбуждения, равный члену (Aoutcos(ωt+θ) (см. уравнение 3, приведенное ниже). Значение (θ) фазового сдвига определяет фазовый синхронизм, а амплитуда Aout содержит амплитуду сигнала возбуждения. Поэтому блок 305 обработки может определять как амплитуду сигнала возбуждения, так и фазу сигнала возбуждения, при этом блок 305 обработки по существу удерживает частоту сигнала датчика на частоте сигнала возбуждения. Преимущественно, блок 305 обработки по существу синхронизирует фазу сигнала возбуждения по фазе сигнала датчика. Это делается возможным операцией сдвига по фазе, при этом фазовый угол сигнала датчика может определяться легко и быстро. Как результат, фазовый угол сигнала возбуждения может очень точно отслеживать фазовый угол сигнала датчика, при этом сигнал возбуждения удерживается в по существу линейном соотношении с сигналом датчика. Это дает измерительной электронике 20 возможность более точно возбуждать расходомер и дает измерительной электронике 20 возможность быстро настраивать сигнал возбуждения в условиях неравномерного потока, такого как многофазные потоки, дозирование типа «пустой-полный-пустой», проточные материалы, включающие в себя вовлеченный воздух и т.п.
Блок 305 обработки может определять фазовый угол сигнала датчика и может управлять сигналом возбуждения, для того чтобы по существу выравнивать фазу сигнала возбуждения по фазе сигнала датчика. Это делается без какой бы то ни было обратной связи по фазе сигнала датчика. Как результат, частота сигнала возбуждения по существу отслеживает частоту сигнала датчика, без необходимости регулировать частоту сигнала возбуждения. Так как амплитуда и фаза сигнала возбуждения определяются быстро, изобретение дает расходомеру возможность возбуждаться очень близко к резонансной частоте, при этом изменения в резонансной частоте отслеживаются по существу мгновенно. Как результат, сигнал возбуждения быстрее реагирует на изменение характеристик потока. Это также дает возможность реализации различной диагностики расходомера. Например, сигнал возбуждения может быстро меняться, для того чтобы оценивать коэффициент калибровки расхода (FCF), определять жесткость расходомерной трубки, выявлять трещины или дефекты в расходомерной трубке, определять величину покрывающего слоя проточного материала внутри расходомерной трубки и т.п.
Блок 305 обработки может определять амплитуду сигнала датчика и может формировать амплитуду сигнала возбуждения на основании амплитуды сигнала датчика. Блок 305 обработки может сравнивать амплитуду сигнала датчика с базой отсчета амплитуды (например, такой как заданное значение амплитуды или рабочий диапазон амплитуды) и может увеличивать масштаб или уменьшать масштаб сигнала возбуждения по необходимости.
Сигнал датчика (или сигнал датчика измерителя, PO) может быть представлен уравнением:

где член cosωt означает изменяющуюся во времени сущность сигнала датчика, а член Ain представляет амплитуду сигнала датчика. Сдвинутый по фазе выходной сигнал (PSO) блока фазового сдвига может быть представлен уравнением:

где член (Ainsinωt) представляет сдвинутый по фазе вариант сигнала датчика. С использованием этого выходного сигнала, блок 305 может генерировать выход сигнала возбуждения, который включает в себя член θ корректировки фазовой задержки, где член θ корректировки фазовой задержки прибавляется к или вычитается из сигнала PO датчика. Как результат, сигнал возбуждения содержит:
Сигнал возбуждения 
Надлежащим выбором значения θ, ωt+θ в члене (Aoutcos(ωt+θ)) могут по существу совпадать с фазой датчика.
Амплитуда Aout сигнала возбуждения может выводиться из уравнения (2), где амплитуда Ain сигнала датчика может определяться из уравнения:

Амплитуда Ain сигнала датчика может увеличиваться или уменьшаться по масштабу, чтобы генерировать амплитуду Aout сигнала возбуждения.
Фиг.4 - блок-схема 400 последовательности операций способа для генерирования сигнала возбуждения для колебательного расходомера согласно варианту осуществления изобретения. На этапе 401, принимается сигнал датчика. Сигнал датчика может содержать выходной сигнал датчика измерителя, который формирует изменяющийся во времени электронный сигнал в ответ на вибрацию одной или более расходомерных трубок расходомера.
На этапе 402, принятый сигнал датчика сдвигается по фазе приблизительно на 90 градусов. В одном из вариантов осуществления, операция сдвига по фазе выполняется, например, с использованием преобразования Гильберта. Однако должно быть понятно, что другие способы сдвига по фазе также могут применяться. Операция сдвига по фазе может генерировать член Asinωt в дополнение к члену Acosωt, который представляет сигнал датчика.
На этапе 403, амплитуда сигнала датчика определяется по сигналу датчика и 90-градусному фазовому сдвигу, то есть, с использованием члена (Ainsinωt) и члена (Aincosωt) (см. уравнение 4).
На этапе 404, амплитуда сигнала датчика используется для генерирования амплитуды сигнала возбуждения. Амплитуда сигнала возбуждения основана на амплитуде сигнала датчика. Однако амплитуда сигнала возбуждения может увеличиваться или уменьшаться по масштабу относительно амплитуды сигнала датчика. Масштабирование в некоторых вариантах осуществления ограничивается, и масштабирование может ограничиваться верхней и/или нижней границами масштабирования.
На этапе 405, амплитуда сигнала возбуждения включается в сигнал возбуждения. Следовательно, способ 400 формирует быструю и точную амплитуду для сигнала возбуждения.
Вышеприведенный способ может выполняться итерактивно и/или по существу непрерывно, для того чтобы по существу непрерывно формировать амплитуду сигнала возбуждения. Амплитуда сигнала возбуждения может определяться быстро, при этом амплитуда сигнала возбуждения формируется по существу мгновенно.
Фиг.5 - блок-схема 500 последовательности операций способа для формирования сигнала возбуждения для колебательного расходомера согласно варианту осуществления изобретения. На этапе 501, принимается сигнал датчика, как обсуждалось ранее.
На этапе 502, принятый сигнал датчика сдвигается по фазе по существу на 90 градусов, как обсуждалось ранее.
На этапе 503, значение (θ) фазового сдвига определяется по частотной характеристике колебательного расходомера. Значение (θ) фазового сдвига может содержать значение компенсации, такое как значение опережения по фазе (то есть +θ) или значение запаздывания по фазе (то есть -θ). Значение (θ) фазового сдвига может определяться осуществлением корреляции частотной характеристики с отношением частота/фаза. В одном из вариантов осуществления, отношение частота/фаза содержит эмпирически полученное отношение частоты к фазе. Например, несколько значений частоты к фазе могут быть получены и сохранены, при этом сохраненные значения используются для вывода или интерполяции необходимого значения (θ) фазового сдвига. В качестве альтернативы, отношение частота/фаза содержит теоретическое отношение, сформированное из вычисленных заранее значений фазы и частоты.
На этапе 504, значение (θ) фазового сдвига объединяется с сигналом датчика (членом (Acosωt)) и сдвинутым по фазе сигналом датчика (членом (Asinωt)), для того чтобы формировать фазу сигнала возбуждения.
На этапе 505, амплитуда сигнала возбуждения включается в сигнал возбуждения. Этим способом фаза сигнала возбуждения по существу синхронизируется по фазе сигнала датчика.
Вышеприведенный способ может выполняться итеративно и/или по существу непрерывно, для того чтобы по существу непрерывно генерировать фазу сигнала возбуждения, как обсуждалось ранее. Фаза сигнала возбуждения может определяться быстро, при этом фаза сигнала возбуждения генерируется по существу мгновенно.
Должно быть понятно, что способ 400 и способ 500 преимущественно могут объединяться, для того чтобы формировать обе, фазу сигнала возбуждения и амплитуду сигнала возбуждения. Объединенные способы 400 и 500, в некоторых вариантах осуществления, формируют полный сигнал возбуждения.
Фиг.6 - структурная схема цифрового возбуждения 600 с замкнутым контуром согласно варианту осуществления изобретения. Структурная схема представляет различные функциональные возможности, которые включены в систему 203 обработки данных в этом варианте осуществления.
Выходной сигнал цифрового возбудителя в аппаратные средства усилителя возбудителя (усилитель не показан) находится на верхней левой стороне чертежа. Ток возбуждения и напряжение возбуждения вводятся с платы считывания в блок 601 приведения в нужное состояние входного сигнала наряду с температурой их схемы RTD и сигналами (LPO и RPO) двух датчиков измерителя. Блок 601 приведения в нужное состояние может выполнять любой вид фильтрации и прореживания.
Признаки цифрового возбуждения реализованы, главным образом, в двух блоках, блоке 611 расчета частоты-амплитуды и блоке 613 системы управления возбуждением с обратной связью. Блок 611 расчета частоты-амплитуды, в показанном варианте осуществления, использует блок оценки частоты Гильберта и может использовать единственную или сдвоенную компоновку оценки амплитуды. Блок 613 системы управления возбуждением с обратной связью генерирует сигнал возбуждения согласно изобретению.
Блок 601 приведения в исходное состояние входного сигнала может выполнять фильтрацию, для того чтобы удалять более высокие частотные составляющие из сигналов датчика измерителя, чтобы гарантировать, что возбуждение с замкнутым контуром возбуждает основную форму колебаний изгиба вибрационного расходомера. В частности, фильтрация может быть предназначена для удаления второй гармоники и, к тому же, может удалять частоту формы колебаний кручения из сигналов датчиков. Это может делаться с помощью настраиваемого фильтра нижних частот. Частота среза фильтра может быть основана на K1, который является периодом трубки на воздухе.
Фиг.7 показывает блок 601 приведения в нужное состояние входного сигнала согласно варианту осуществления изобретения. Фиг.7 дополнительно показывает местоположение настраиваемого фильтра нижних частот в пределах блока 601 приведения в нужное состояние входного сигнала и, к тому же, показывает частоты выборки, используемые в различных узлах блока 601 приведения в нужное состояние входного сигнала. Сигналы приходят слева на базовой частоте выборки через блок прореживания каскада 1. В одном из вариантов осуществления, базовая частота выборки выбрана, чтобы быть около 47 кГц, так что кодировщик/декодер (Кодек) защищается от наложения спектров надлежащим образом. Прореживание каскада 1 снижает частоту выборки до приблизительно 4 кГц, а частота 4 кГц используется до настраиваемого фильтра нижних частот. Три сигнала обратной связи датчика перемещений в 4 кГц выводятся из блока приведения в нужное состояние входного сигнала в качестве сигналов LPO и RPO, а также подвергнутого модовой фильтрации сигнала PO (обозначенного как η или эта), для обратной связи возбуждения на выходном порте, маркированном Обратная связь PO, в правой нижней части фигуры. Модовый фильтр может быть сконструирован с использованием любого способа. В одном из вариантов осуществления, упрощенный вектор модового фильтра {0,5; 0,5} может использоваться, например, для создания среднего значения сигналов LPO и RPO.
Сигналы датчиков перемещений выводятся из блока при частоте выборки 2 кГц после прохождения через настраиваемый фильтр нижних частот. Оба набора сигналов датчиков перемещений, по выбору, могут проводиться через блок масштабирования для преобразования их в милливольтовые уровни. Все сигналы масштабируются в надлежащие значения с фиксированной точкой посредством технологии, известной специалисту в данной области техники. Результирующие сигналы датчиков измерителя на обеих частотах выборки подаются в блок 611 расчета частоты-амплитуды.
Фиг.8 показывает реализацию настраиваемого идеального фильтра нижних частот порядка N=100, размноженного с окном Хенинга для создания фильтра нижних частот с конечной импульсной характеристикой (КИХ), показанного справа по Фиг.7. Скалярное произведение коэффициентов фильтра и N буферизованных отсчетов предпринимается, чтобы вырабатывать подвергнутый фильтрации нижних частот выходной сигнал. Коэффициенты фильтра перерассчитываются в задействованной подсистеме, чтобы давать надлежащую частоту среза всякий раз, когда K1 изменяется.
Фиг.9 показывает задействованную подсистему для расчета коэффициентов для фильтра по Фиг.8. Нормализованная частота среза рассчитывается по K1, который является периодом трубки в микросекундах на воздухе, самой нижней сигнальной цепью. Частота трубки будет всегда равной или меньшей, чем частота на воздухе, значит, K1 является хорошим вариантом параметров для выбора ради настройки фильтра нижних частот. В одном из вариантов осуществления, 20 Гц плюс частота на воздухе, соответствующая K1, используется в качестве частоты среза. В качестве альтернативы, частота среза может настраиваться динамически на основании частоты возбуждения. Коэффициент передачи фильтра начинает резко падать перед частотой среза, поэтому показатель 20 Гц дает минимально допустимый запас из условия, чтобы коэффициентом передачи фильтра на частоте на воздухе была 1.
Чтобы гарантировать приведение в действие всех датчиков, значение K1 по умолчанию является таким, что оно находится на наивысшей частоте любого датчика, с которым оно могло бы быть связанным. Таким образом, если пользователь претерпевает неудачу в выборе надлежащего значения K1 для реального датчика, датчик будет по-прежнему запускаться.
Фиг.10 показывает блок 611 расчета частоты-амплитуды согласно варианту осуществления изобретения. Два набора сигналов датчиков перемещения (то есть «эта и высокий входной сигнал PO» и «эта и низкий входной сигнал PO») используются для расчета двух независимых наборов амплитуд. Блок 1001 пикового детектирования по сигналам 4 кГц может использоваться для расчета амплитуд сигналов на основании, например, пикового детектора. Нижний, блок 1002 частоты-амплитуды Гильберта применяет подход сигнальной обработки Гильберта к сигналам 2 кГц, чтобы рассчитывать оценку амплитуды, которая больше коррелирована с синусоидальной амплитудой на частоте возбуждения. То или другое вычисление амплитуды может выбираться и выводиться мультиплексором (MUX).
Этот снабженный двумя направлениями подход к амплитуде предоставляет измерительной электронике 20 возможность реагировать на зашумленные сигналы датчиков измерителя. Если амплитуда пикового детектирования подобна амплитуде Гильберта, то уровень шумов является приемлемым. Если пиковое детектирование выше, чем амплитуда Гильберта, то есть широкополосный шум, присутствующий в сигналах датчиков измерителя. В этом случае измерительная электроника 20 может принимать решение, какой сигнал амплитуды использовать, может устанавливать предупредительный признак или состояние ошибки и/или может изменять масштаб значений коэффициента усиления любых предусилителей.
Фиг.11 показывает блок 1002 частоты-амплитуды Гильберта согласно варианту осуществления изобретения. Преобразование Гильберта сдвигает входной сигнал на 90 градусов по фазе. Блок цифрового фильтра вверху справа по фигуре реализует фильтр Гильберта. Выходным сигналом блока цифрового фильтра является сдвинутый по фазе входной сигнал (то есть сигнал Re). Блок регулируемой целочисленной задержки сдвигает нефильтрованный сигнал на одну половину порядка КИХ-фильтра Гильберта. Результатом являются два сигнала, нефильтрованный задержанный входной сигнал (синфазная составляющая, Im) и входной сигнал, сдвинутый на 90 градусов (квадратурная составляющая, Re), с задержкой, обусловленной КИХ-фильтром Гильберта. Два сигнала затем объединяются в комплексное число. Модуль комплексного числа является синусоидальной амплитудой, которая является интересующим параметром для управления возбуждением. Частота также может рассчитываться по комплексному числу и детализируется ниже. Отметим, что рассчитываются амплитуда и частота, а также квадратурные члены всех трех сигналов LPO, RPO и η. Сигналы частоты и амплитуды могут прореживаться до более низкой частоты выборки, по необходимости, типично, вплоть до 500 Гц, для использования при управлении возбуждением. Частота дополнительно используется для расчетов плотности и расхода.
Фиг.12 показывает блок 1101 оценки частоты Гильберта согласно варианту осуществления изобретения. В блоке 1101 оценки частоты Гильберта, сигналы I и Q принимаются справа. Сигнал задерживается на один отсчет и берется его комплексное сопряжение. Скалярное произведение исходного комплексного числа и задержанной по времени сопряженной величины имеет следствием комплексное число, чей угол является углом между двумя векторами. Угол между двумя векторами качался в течение времени dt выборки. Деление угла на время выборки (и 2π) дает частоту.



Компенсационный фильтр Гильберта используется для сглаживания оценки частоты. Берется абсолютное значение частоты, поскольку угловая функция может возвращать отрицательное число. Для сигнальной обработки блока 1101 оценки частоты Гильберта (а также блока 1002 частоты-амплитуды Гильберта), цифровое возбуждение 600 может использовать частоты RPO либо LPO.
Снова со ссылкой на Фиг.6, I и Q сигналы эта преследуют цель измерения параметров потока, а частота направлена на измерения как расхода, так и плотности, как обсуждалось выше. Частота и амплитуда на более низкой частоте выборки и сигнал обратной связи на частоте 4 кГц выборки подаются в блок 613 системы управления возбуждением с обратной связью.
Фиг.13 показывает блок 613 системы управления возбуждением с обратной связью согласно варианту осуществления изобретения. Должно быть отмечено, что блок 613 системы управления возбуждением с обратной связью может включать в себя более чем одну частоту выборки. В показанном варианте осуществления, есть 3 частоты выборки, которые применяются в блоке 613 системы управления возбуждением с обратной связью. В показанном варианте осуществления, тремя частотами выборки являются частота выборки 500 Гц для оценки частоты и амплитуды, частота выборки 4 кГц для сигнала обратной связи и частота выборки выходного сигнала в 8 кГц.
Есть три входных сигнала в блок 1301 АРУ. Оценки частоты и амплитуды используются для расчета фактической двойной амплитуды в милливольтах/Гц, которые являются единицами для амплитуды. Второй входной сигнал является базой отсчета возбуждения или заданным значением, мВ/Гц. Заключительным входным сигналом является входной сигнал номинального тока.
Блок 1301 АРУ имеет два выходных сигнала. Первым выходным сигналом является выходной сигнал разрешения толчка, обсужденный ниже. Вторым выходным сигналом является выходной сигнал коэффициента передачи цепи обратной связи, который умножает обратную связь, чтобы вырабатывать сигнал возбуждения. Ветвь обратной связи возбуждения выбирает η, подвергнутые модовой фильтрации сигналы датчиков измерителя, из трех возможных вариантов выбора (LPO, RPO и η). Член η является синусоидальным сигналом на частоте возбуждения с замкнутым контуром и изменяющейся амплитудой, зависящей от амплитуды реального датчика. Эта изменяющаяся амплитуда, объединенная с блоком умножения, выдает нелинейную частотную характеристику, то есть она предусматривает отличающийся вес управления, зависящий от амплитуды. Деление η на его амплитуду дает синусоиду с точной частотой, но с единичной амплитудой. Единичная амплитуда устраняет любую нелинейность. Поскольку обратная связь происходит на более быстрой частоте выборки, чем коэффициент передачи цепи обратной связи, коэффициент передачи цепи обратной связи использует блок преобразования частоты выборки перед умножением, чтобы гарантировать совместимость сигналов.
Выходной сигнал блока умножения является сигналом возбуждения при точной частоте и амплитуде, но с неточной фазой вследствие групповой задержки по причине аппаратных средств и программного обеспечения ЦСП (цифрового сигнального процессора, DSP). Поправка на групповую задержку может совершаться различными способами. Однако новейший способ, представленный здесь, является эффективным по вычислениям. Сигнал возбуждения сначала проводится в блок 1302 фильтра Гильберта, подобный таковому на Фиг.11 (обсужденной выше), но работающий на 4 кГц и с меньшим порядком фильтра для сбережения пропускной способности процессора для этого менее требовательного применения. Выходным сигналом являются два сигнала возбуждения в квадратуре с точными амплитудой и частотой. Квадратурные сигналы возбуждения проводятся из блока 1302 фильтра Гильберта в блок 1303 компенсации групповой задержки наряду с частотой возбуждения.
Фиг.14 показывает блок 1303 компенсации групповой задержки согласно варианту осуществления изобретения. В автономном режиме, единовременным образом групповая задержка из-за ЦСП характеризуется экспериментально смещением и крутизной. В качестве альтернативы, аппаратные средства считывания тока в усилителе тока могут предусматривать необязательную возможность для расчета компенсации групповой задержки в неавтономном режиме. Фазовая задержка, требуемая для компенсации групповой задержки, является функцией частоты, как обсуждено ранее. Входная частота используется для расчета требуемой компенсации групповой задержки (то есть значения (θ) фазового сдвига) в блоке 1303 компенсации групповой задержки с использованием экспериментально определенных крутизны и смещения. Квадратурные сигналы возбуждения затем умножаются на синус и косинус требуемой компенсации фазовой задержки и суммируются. Выходной сигнал блока суммирования имеет результатом сигнал возбуждения, который обладает точной фазой, частотой и амплитудой, чтобы возбуждать датчик в резонансе.
Возвращаясь к Фиг.13, сигнал возбуждения подается на коммутатор на левой стороне фигуры. При нормальной работе коммутатор передает сигнал возбуждения через цифроаналоговый преобразователь (ЦАП, DAC) и усилитель тока и, в конечном счете, на возбудитель 180 (см. Фиг.1). Однако, в показанном варианте осуществления, есть логика, включенная в блок АРУ, которая разрешает признак толчка. Следовательно, когда амплитуда датчика перемещений падает ниже определенного процента заданного значения или ниже некоторого абсолютного значения, логика блока АРУ может обеспечивать сигнал «Разрешить толчок», осуществляющий переключение в режим толчка. В режиме толчка, энергия вводится из блока линейной частотной модуляции в левой верхней части фигуры. Блок линейной частотной модуляции выводит сигнал на близкой к максимальной амплитуде тока в режиме с разомкнутым контуром. Линейная частотная модуляция осуществляет качание через несколько разных частотных диапазонов до тех пор, пока датчик не «запускается», что определяется амплитудой датчика измерителя, превышающей базу отсчета толчка. Частотные диапазоны основаны на последнем предыдущем значении частоты возбуждения, диапазоне частот, соответствующем K1, и частоте, соответствующей плотности, в несколько раз большей, чем плотность, соответствующая K2, и широком диапазоне, покрывающем обширный диапазон датчиков. Различные диапазоны гарантируют, что датчик будет запускаться, даже если неточные параметры датчика введены в измерительную электронику 20, например, если электроника инициализирована возвратом к параметрам завода-изготовителя.
Выходной сигнал коммутатора, при нормальном возбуждении или режиме толчка, проходит через фильтр интерполяции или дискретизации с повышением частоты, типично до 8 кГц. Сигнал возбуждения обновляется на 8 кГц с окончательной частотой выборки выходного сигнала на кодеке (ЦАП) в 48 кГц. Специалисту в данной области техники будет ясно, что выбор частот выборки для входного сигнала, обратной связи, частоты обновления и выходного сигнала является компромиссным решением, основанным на требованиях к рабочим характеристикам и пропускной способности процессора. Конкретные варианты частоты выборки могут быть оптимизированы для выбранных аппаратных средств и для требуемых рабочих характеристик. Конкретные реализации фильтра, в том числе порядка фильтра, частоты среза и т.п., предназначены для согласования выбранных частот выборки. Должно быть ясно, что частоты выборки, порядки фильтров, частоты среза и т.п., заданы только для примера, и формула изобретения не ограничена никакими из приведенных примеров.
На Фиг.15 показан блок 1301 автоматической регулировки усиления (АРУ) согласно варианту осуществления изобретения. АРУ принимает, в качестве входных сигналов, фактическую амплитуду смещения в мВ/Гц (содержащую все 6 амплитуд) и смещение заданного значения (в мВ/Гц). Блок 1301 АРУ имеет два выхода, выход разрешения толчка и выход коэффициента передачи цепи обратной связи.
В первом блоке блока 1301 АРУ, входные сигналы нормализуются, чтобы давать процент смещения, то есть, когда фактическое смещение равно заданному значению, фактическим нормализованным смещением является 1,0. Это масштабирование содействует линеаризации контура управления для различных заданных значений амплитуды. Шесть нормализованных амплитуд (пиковое детектирование/преобразование Гильберта для LPO, RPO и η) подаются в блок 1501 диагностики проверки амплитуды. Этот блок осуществляет проверку, чтобы быть уверенным, что все шесть амплитуд дают совместимые числа, которые находятся около 1,0, и взводит признак предупреждения или ошибки, если различия превышают определенные предварительно заданные процентные отношения. Этот блок также выявляет, проскакивает ли датчик заданное значение на ~110%. Если так, этот блок выдает информацию о перерегулировании в блок логики толчка/перерегулирования.
Блок логики толчка/перерегулирования определяет, является ли амплитуда датчика низкой или превышает пороговое значение перерегулирования. Если амплитуда низка, устанавливается сигнал разрешения толчка. Если толчок разрешен либо если амплитуда перерегулирована, этот блок также отправляет сигнал сброса в ПИ-регулятор, обсужденный ниже.
В блоке отношения мВ/Гц, выбираются сигналы для регулирования амплитуды. Например, выбирается пиковое детектирование LPO и RPO. В качестве альтернативы, может быть придуман аргумент для выбора амплитуд LPO и RPO Гильберта или модовых амплитуд. В другом альтернативном варианте, блок мВ/Гц может включать в себя логику, которая выполняет выбор на основании различий по шумам, и т.п.В любом случае, максимальное значение LPO и RPO выбирается для управления.
Выходной сигнал коммутатора подается в блок логики толчка/перерегулирования, а также является подаваемым в блок рассогласования. Поскольку заданное значение теперь нормализовано до 1, ошибкой является просто рассогласование между реальным сигналом и 1. Сигнал ошибки подается в блок дискретного ПИ-сигнала для определения коэффициента передачи цепи обратной связи. Выходной сигнал блока дискретного ПИ-сигнала может подаваться в сумматор, где номинальный ток возбуждения суммируется с выходным сигналом блока ПИ. В одном из вариантов осуществления, реализация устанавливается по умолчанию в номинальный ток возбуждения 0. Блок насыщения контролирует максимальный и минимальный выходные токи по суммированному выходному сигналу, давая в результате заключительный коэффициент передачи цепи обратной связи.
Усилитель тока может применять линейный усилитель. Выходной ток может быть по существу синусоидальным, например, таким как до тех пор, пока он не достигает ограничения тока. Усилитель может работать в 4 квадрантах, то есть он может возбуждать и поглощать ток в обоих, положительном и отрицательном, направлениях. Это дает управлению возбуждением возможность притормаживать расходомерную трубку(и) во время перерегулирования, или когда большие величины шумов потока возбуждают трубку.
Фиг.16 показывает пропорционально-интегральный (ПИ) регулятор согласно варианту осуществления изобретения. Сигнал ошибки принимается в порт 2 из блока 1301 АРУ. Нижняя ветвь умножает ошибку на пропорциональный коэффициент P усиления и передает его на одно из мест соединения блока конечного суммирования. При нормальной работе, то есть когда сигнал сброса интегратора не установлен, используется простой дискретный интегратор, при этом новый сигнал добавляется к предыдущему выходному сигналу интегратора. Новый сигнал сначала умножается на коэффициент I передачи интегрального регулятора. Затем он умножается на время выборки, которое дает частотную характеристику интегратора, независимую от времени выборки. Следуя установившейся практике стандартных конструкций регуляторов, выходной сигнал интегратора насыщается с помощью «противоподъемного» блока. Этот признак удерживает интеграл от интегрирования до бесконечности, если сигнал ошибки не усредняется до нуля, как, например, могло бы происходить в случае вовлеченного воздуха.
Сигнал сброса интегратора, в одном из вариантов осуществления, высок, когда включен толчок или когда трубка проскакивает уровень высокой амплитуды. В этих случаях, выходной сигнал интегратора устанавливается в ноль. В первом случае, интегратор не начинает подниматься, в то время как трубка мешкает с запуском, минимизируя перерегулирование. Чтобы содействовать в этом, используется задержка выключением, чтобы удерживать интегратор выключенным, в то время как трубка выходит на амплитуду. Сброс во время перерегулирования трубки позволяет системе управления приводить амплитуду трубки вниз быстрее, чем если бы был должен постепенно сводить на нет интегратор. Этот признак значительно урезает перерегулирование, когда трубка сильно демпфируется в течение периода времени, например, вовлеченным воздухом, и демпфирование внезапно снимается, например кончается воздух. Без признака сброса интегратор был бы на пределе полного тока, в то время как трубка демпфировалась. Затем, когда демпфирование устраняется, интегратор был бы должен устранять полный ток, а затем интегрировать с понижением при своей постоянной времени до меньшего значения. Трубка была бы на завышенной амплитуде в течение значительно более длительного времени без сброса по признаку перерегулирования.
Фиг.17 включает в себя два графика сигнала возбуждения, которые являются представляющими работу расходомерной трубки в предшествующем уровне техники. Фигура показывает некоторые из проблем, связанных с подходами нелинейного управления возбуждением предшествующего уровня техники. Верхний график на фигуре показывает, что стандартный нелинейный контур управления отнимает несколько секунд на инициирование движения трубки, после которого, по существу, есть перерегулирование, сопровождаемое длительным медленным подходом к амплитуде заданного значения. Нижний график показывает подобную кривую, но здесь начальным условием является большая, чем заданное значение, амплитуда, которое заставляет возбуждение отключаться. Эти графики являются частью традиционного процесса настройки Зиглера-Николза.
Отметим, что после того как возбуждение отключается, имеет место даже более длительное время для приведения в действие, чем начальный запуск. Некоторое из этого приводит к иногда довольно длительной постоянной времени датчика расходомера (см. ниже). Медленный запуск, сопровождаемый перерегулированием, является характерной чертой нелинейной системы возбуждения. Несмотря на то что настройка контура с (пропорционально-интегрально-дифференциальным, PID) ПИД-регулятором может ускорять запуск и минимизировать перерегулирование, при наилучшей настройке компенсирует только одно состояние нелинейной системы. Конечный результат состоит в контуре управления возбуждения, который не очень устойчив к возмущениям, таким как шумные газовые потоки, порционный/двухфазный поток или конструктивные изменения в отношении возбудителя и датчиков измерителя.
Типичный контур управления возбуждением расходомера является нелинейным в двух отношениях. Первое, наиболее очевидное, нелинейность является тем фактом, что скорость обратной связи умножается на коэффициент передачи. Это усиление является нелинейным по определению. Более того, ответный сигнал датчика измерителя, действующий в качестве одного из множителей, зависит от динамики датчика, делая нелинейность зависимой от датчика.
Вторая нелинейность является немного более утонченной. Стандартное уравнение для ответного сигнала линейного датчика приведено ниже,

где H - амплитудно-частотная характеристика, D - динамическая матрица, x - ответный сигнал, F - сила.
Что типично упущено в этих уравнениях, но является важным допущением, является тем обстоятельством, что уравнения линеаризованы около номинальной рабочей точки. Уравнение для линейной системы приводится более точно в виде:

где нижний индекс 0 - указывает на номинальное смещение и номинальную силу. Поскольку стандартный контур управления не учитывает номинальные силы или номинальные амплитуды, ответный сигнал датчика, а также характеристика полной системы управления с обратной связью является функцией заданного значения. Номинальные силы и амплитуды, конечно, являются зависимыми от массы, жесткости и демпфирования конструкции расходомера, а также коэффициентов чувствительности BL обмоток возбуждения и датчиков измерителя.
Измерительная электроника и способы, в некоторых вариантах осуществления, включают в себя изменения в контуре управления с обратной связью для линеаризации системы. Есть два этапа к линеаризации системы, учитывающие две нелинейности, описанные выше. Любой (или оба) могу использоваться, чтобы давать преимущество в усовершенствованной системе возбуждения с обратной связью по изобретению. Результатом является линейный контур управления, который устойчиво регулирует возбуждение. В дополнение, изобретение линеаризует контур управления наряду с автоматическим учетом любых различий в динамике датчиков, делая конструкцию устойчивой для любой заданной конструкции датчика.
Первая линеаризация удаляет мультипликативную нелинейность принуждением ответного сигнала быть единичным. Есть некоторые способы для достижения этого, например, с использованием коэффициента поправки или настраиваемого сигнала, с преобразованием в прямоугольную волну единичной амплитуды для цифрового возбуждения прямоугольной волны и т.п.Способ, показанный ниже, использует уже рассчитанный сигнал амплитуды для нормализации обратной связи единицей. Даже если по-прежнему есть операция умножения, умножение на 1 не добавляет нелинейности.
Фиг.18 показывает структурную схему 1800 линеаризованного управления возбуждением согласно варианту осуществления изобретения. На чертеже, обратная связь датчика перемещений нормализуется по амплитуде в блоке «Нормализации PO» в нижней части фигуры. Отметим, что отклонения в любой из динамик датчика автоматически учитываются этим способом. Вторая линеаризация добавляет номинальную силу, основанную на заданном значении. Заданное значение амплитуды умножается блоком «Номинального коэффициента передачи» и добавляется к коэффициенту передачи пропорционально-интегрально-дифференциального регулирования (ПИД) в блоке «Суммарного коэффициента передачи». Добавление выходного сигнала номинального коэффициента передачи к коэффициенту передачи ПИД-регулирования имеет следствием систему с датчиками, которая предлагает практически нулевое демпфирование, то есть она является более или менее устойчивой. В терминах регулирования, эта линеаризованная система не является «валкой», то есть, выходной сигнал ПИД является нулевым, когда система достигает заданного значения. Никакая ошибка не требуется для того, чтобы вырабатывать номинальную силу. Несмотря на то что номинальный коэффициент передачи является функцией динамики датчика, система управления теперь является независимой от датчика. Следовательно, оптимизированный набор коэффициентов передачи ПИД будет работать для очень широкого диапазона датчиков.
В стандартной системе управления, которая является довольно валкой, ошибка, умноженная на пропорциональный коэффициент передачи, плюс интегрированная ошибка, умноженная на коэффициент передачи интегрального регулятора, используется для выдачи номинальной силы. Как результат, валкость в очень большой степени является функцией массы, жесткости и демпфирования датчика.
Ключом к этому подходу является номинальное значение коэффициента передачи. Это значение может находиться разными способами. В основанном на модах подходе самоопределяющегося датчика, номинальный коэффициент передачи является просто измеренным значением демпфирования. Подход упрощенной диагностики может использоваться для формирования точного значения. Номинальный коэффициент передачи может определяться с помощью простой «прозвонки» возбудителя при запуске и выполнения быстрой и грубой идентификации системы. Номинальный коэффициент передачи может быть в справочной таблице, например, основанной на частоте, измеренной амплитудно-частотной характеристике (АЧХ, FRF) возбудителя или сопротивлении RTD.
Удобная альтернатива получению измеренного коэффициента передачи состоит в том, чтобы позволять датчику запускаться с нулевым номинальным коэффициентом передачи, а после того как ошибка минимизирована стандартным контуром ПИД-регулирования, переносить число коэффициента передачи ПИД-регулирования в номинальный коэффициент передачи и сбрасывать выход интегратора ПИД-регулирования.
С этой схемой, любое отклонение коэффициента передачи ПИД-регулирования от нуля будет указывающим на изменения системы, обусловленные изменениями в состояниях датчика, монтажа или флюида. Краткосрочное или долгосрочное отклонение коэффициента передачи ПИД-регулирования может быть простой мощной диагностикой.
Фиг.19 содержит графики линеаризованного управления возбуждением согласно варианту осуществления изобретения. Чертеж показывает, что эти линеаризации сокращают времена запуска и восстановления, убыстряют реакцию системы и делают коэффициенты передачи ПИД-регулирования инвариантными амплитуде. На чертеже показано, что усовершенствования согласно изобретению будут повышать рабочие характеристики датчика на сложных флюидах, таких как двухфазный поток.
Фиг.19 показывает, что первая линеаризация значительно снижает перерегулирование запуска и сокращает время, требуемое для того, чтобы достигать амплитуды заданного значения. Использование обеих линеаризаций имеет следствием по существу отсутствие перерегулирования и более быстрый запуск. Нижний график по Фиг.19 показывает, что первая линеаризация сокращает время восстановления. Использование обеих линеаризаций устраняет какое бы то ни было время восстановления. Никакие условные операторы не требуются в линеаризованных контурах для получения этого повышения рабочих характеристик.
Фиг.20 показывает независимость амплитуды заданного значения линеаризованных контуров. При повышении и уменьшении с коэффициентом 5 амплитуды, линеаризованные контуры управления показывают подобные, в большой степени улучшенные рабочие характеристики над стандартным контуром управления. В большой степени улучшенные рабочие характеристики, например более быстрая реакция, меньшее перерегулирование/недорегулирование, более быстрый запуск/восстановление и т.п., будут превращаться в лучшие рабочие характеристики возбуждения на сложных флюидах. Улучшенные рабочие характеристики и линеаризация контура возбуждения также будут иметь следствием меньшие ограничения на конструкторов по геометриям датчиков, возбудителям и датчикам измерителя.
Измерительная электроника и способы согласно изобретению могут применяться согласно любому из вариантов осуществления, для того чтобы обеспечивать некоторые преимущества, если требуется. Изобретение обеспечивает точный сигнал возбуждения. Изобретение обеспечивает сигнал возбуждения для любого вида датчиков измерителя. Изобретение определяет сигнал возбуждения по существу мгновенно. Изобретение обеспечивает сигнал возбуждения, который быстро и точно отслеживает сигнал датчика. Изобретение обеспечивает более быструю реакцию сигнала на изменение характеристик потока. Изобретение обеспечивает сигнал возбуждения, который детектирует и отслеживает аномалии в проточном материале.
Изобретение обеспечивает сигнал возбуждения, в котором фаза сигнала возбуждения по существу синхронизирована с фазой сигнала датчика. Изобретение обеспечивает сигнал возбуждения, в котором фаза сигнала возбуждения по существу синхронизирована по фазе без использования обратной связи. Изобретение обеспечивает сигнал возбуждения, который не регулирует (или не нуждается в регулировании) значения частоты выходного сигнала.
Изобретение обеспечивает быструю компенсацию фазы, которая преимущественно может быть привязана к быстрому определению частоты. Изобретение минимизирует требования по току для сигнала возбуждения. Изобретение обеспечивает лучшую реакцию расходомерной трубки на условия вовлеченного воздуха и на операцию типа «пустой-полный-пустой». Изобретение дает расходомеру возможность возбуждаться ближе к резонансной частоте. Изобретение дает возможность более точного снятия характеристик шума в сигнале датчика. Изобретение дает возможность высокоточной реализации диагностики расходомера.
Изобретение может быть использовано для возбуждения трубок массового расходомера Кориолиса или вибрационного трубчатого плотномера. Измерительная электроника включает в себя интерфейс (201) и систему (203) обработки данных. Система обработки данных сконфигурирована для приема сигнала (210) датчика через интерфейс, сдвига по фазе сигнала (210) датчика на 90 градусов, определения значения фазового сдвига по частотной характеристике вибрационного расходомера и объединения значения фазового сдвига с сигналом (201) датчика и сдвинутым по фазе сигналом датчика для того, чтобы генерировать фазу (213) сигнала возбуждения. Система обработки данных дополнительно сконфигурирована для определения амплитуды (214) сигнала датчика по сигналу (210) датчика и сдвинутому по фазе сигналу датчика и формирования амплитуды (215) сигнала возбуждения на основании амплитуды (214) сигнала датчика, при этом фаза (213) сигнала возбуждения идентична фазе (212) сигнала датчика. Изобретение повышает точность возбуждения, обеспечивая по существу мгновенную настройку сигнала возбуждения в условиях многофазных потоков, содержащих вовлеченный воздух, а также минимизирует требования по току для сигнала возбуждения. 4 н. и 37 з.п. ф-лы, 20 ил.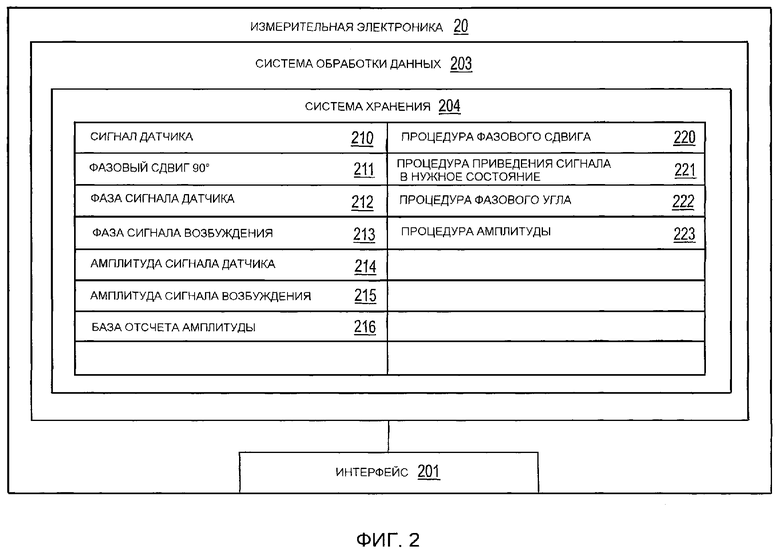
1. Измерительная электроника (20) для генерирования сигнала возбуждения для вибрационного расходомера (5), содержащая
интерфейс (201) для приема сигнала (210) датчика от вибрационного расходомера (5); и
систему (203) обработки данных связанную с интерфейсом (201) и сконфигурированную для приема сигнала (210) датчика, сдвига по фазе сигнала (210) датчика, по существу, на 90°, для создания сдвинутого по фазе сигнала датчика, определения значения (θ) фазового сдвига по частотной характеристике вибрационного расходомера (5), объединения значения (θ) фазового сдвига с сигналом (210) датчика и сдвинутым по фазе сигналом датчика для того, чтобы генерировать фазу (213) сигнала возбуждения, определения амплитуды (214) сигнала датчика по сигналу (210) датчика и сдвинутому по фазе сигналу датчика, и формирования амплитуды (215) сигнала возбуждения на основании амплитуды (214) сигнала датчика, при этом фаза (213) сигнала возбуждения, по существу, идентична фазе (212) сигнала датчика.
2. Измерительная электроника (20) по п.1, в которой сдвиг по фазе выполняется посредством преобразования Гильберта.
3. Измерительная электроника (20) по п.1, причем значение (θ) фазового сдвига содержит значение компенсации.
4. Измерительная электроника (20) по п.1, причем определение значения (θ) фазового сдвига содержит осуществление линейной корреляции частотной характеристики с отношением частота/фаза для того, чтобы вырабатывать значение (θ) фазового сдвига.
5. Измерительная электроника (20) по п.1, причем определение амплитуды (214) сигнала датчика содержит
прием члена Acosωt, представляющего сигнал (210) датчика;
генерирование члена Asinωt из фазового сдвига;
возведение в квадрат члена Acosωt и члена Asinωt; и
извлечение квадратного корня из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt для определения амплитуды (214) сигнала датчика.
6. Измерительная электроника (20) по п.1, причем генерирование амплитуды (215) сигнала возбуждения дополнительно содержит
сравнение амплитуды (214) сигнала датчика с базой (216) отсчета амплитуды; и
масштабирование амплитуды (214) сигнала датчика для генерирования амплитуды (215) сигнала возбуждения, причем масштабирование является основанным на сравнении амплитуды (214) сигнала датчика с базой (216) отсчета амплитуды.
7. Измерительная электроника (20) по п.1, дополнительно содержащая осуществление частотной линейной модуляции сигнала возбуждения при вводе расходомера (5) в действие.
8. Измерительная электроника (20) по п.1, дополнительно содержащая осуществление частотной линейной модуляции сигнала возбуждения при вводе расходомера (5) в действие, причем осуществление частотной линейной модуляции содержит ступенчатое качание частоты через два или более частотных диапазонов до тех пор, пока расходомер (5) не запускается.
9. Измерительная электроника (20) по п.1, дополнительно содержащая линеаризацию сигнала возбуждения.
10. Измерительная электроника (20) по п.1, дополнительно содержащая
расчет второй амплитуды с использованием пикового детектирования;
сравнение амплитуды (214) сигнала датчика со второй амплитудой; и
детектирование широкополосного шума на датчике перемещений, если вторая амплитуда выше, чем амплитуда (214) сигнала датчика.
11. Способ для генерирования сигнала возбуждения для вибрационного расходомера (5), способ содержит этапы, на которых
принимают сигнал (210) датчика от вибрационного расходомера (5);
сдвигают по фазе сигнал (210) датчика, по существу, на 90°, чтобы создать сдвинутый по фазе сигнал датчика;
определяют амплитуду (214) сигнала датчика по сигналу (210) датчика и сдвинутому по фазе сигналу датчика;
генерируют амплитуду (215) сигнала возбуждения на основании амплитуды (214) сигнала датчика; и
генерируют сигнал возбуждения, включающий в себя амплитуду (215) сигнала возбуждения.
12. Способ по п.11, в котором сдвиг по фазе выполняют посредством преобразования Гильберта.
13. Способ по п.11, причем определение амплитуды (214) сигнала датчика состоит из этапов, на которых
принимают член Acosωt, представляющий сигнал (210) датчика;
генерируют член Asinωt из фазового сдвига;
возводят в квадрат член Acosωt и член Asinωt; и
извлекают квадратный корень из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt для того, чтобы определить амплитуду (214) сигнала датчика.
14. Способ по п.11, причем генерирование амплитуды (215) сигнала возбуждения дополнительно содержит этапы, на которых
сравнивают амплитуду (214) сигнала датчика с базой (216) отсчета амплитуды; и
масштабируют амплитуду (214) сигнала датчика для того, чтобы формировать амплитуду (215) сигнала возбуждения, причем масштабирование является основанным на сравнении амплитуды (214) сигнала датчика с базой (216) отсчета амплитуды.
15. Способ по п.11, дополнительно содержащий этапы, на которых
определяют значение (θ) фазового сдвига по частотной характеристике колебательного расходомера (5);
объединяют значение (θ) фазового сдвига с сигналом (210) датчика и сдвинутым по фазе сигналом датчика для того, чтобы генерировать фазу (213) сигнала возбуждения; и
включают фазу (213) сигнала возбуждения в сигнал возбуждения, при этом фаза (213) сигнала возбуждения, по существу, идентична фазе (212) сигнала датчика.
16. Способ по п.11, дополнительно содержащий этапы, на которых
осуществляют линейную корреляцию частотной характеристики с отношением частота/фаза для того, чтобы вырабатывать значение (θ) фазового сдвига;
объединяют значение (θ) фазового сдвига с сигналом (210) датчика и сдвинутым по фазе сигналом датчика для того, чтобы генерировать фазу (213) сигнала возбуждения; и
включают фазу (213) сигнала возбуждения в сигнал возбуждения, при этом фаза (213) сигнала возбуждения, по существу, идентична фазе (212) сигнала датчика.
17. Способ по п.11, дополнительно состоящий в том, что осуществляют частотную линейную модуляцию сигнала возбуждения при вводе расходомера (5) в действие.
18. Способ по п.11, дополнительно содержащий этап, на котором осуществляют частотную линейную модуляцию сигнала возбуждения при вводе расходомера (5) в действие, причем осуществление частотной линейной модуляции состоит в том, что осуществляют качание через два или более частотных диапазонов до тех пор, пока расходомер (5) не запускается.
19. Способ по п.11, дополнительно содержащий этап, на котором линеаризуют сигнал возбуждения.
20. Способ по п.11, дополнительно содержащий этап, на котором
рассчитывают вторую амплитуду с использованием пикового детектирования;
сравнивают амплитуду (214) сигнала датчика со второй амплитудой; и
детектируют широкополосный шум на датчике перемещений, если вторая амплитуда выше, чем амплитуда (214) сигнала датчика.
21. Способ для генерирования сигнала возбуждения для вибрационного расходомера (5), способ содержит этапы, на которых
принимают сигнал (210) датчика из вибрационного расходомера (5);
сдвигают по фазе сигнал (210) датчика, по существу, на 90°, чтобы создать сдвинутый по фазе сигнал датчика;
определяют значение (θ) фазового сдвига по частотной характеристике колебательного расходомера (5); и
объединяют значение (θ) фазового сдвига с сигналом (210) датчика и сдвинутым по фазе сигналом датчика для того, чтобы генерировать сигнал возбуждения, при этом фаза (213) сигнала возбуждения, по существу, идентична фазе (212) сигнала датчика.
22. Способ по п.21, в котором сдвиг по фазе выполняют посредством преобразования Гильберта.
23. Способ по п.21, причем значение (θ) фазового сдвига содержит значение компенсации.
24. Способ по п.21, причем определение значения (θ) фазового сдвига состоит в том, что осуществляют линейную корреляцию частотной характеристики с отношением частота/фаза, для того чтобы вырабатывать значение (θ) фазового сдвига.
25. Способ по п.21, дополнительно содержащий этапы, на которых
определяют амплитуду (214) сигнала датчика по сигналу (210) датчика и сдвинутому по фазе сигналу датчика;
генерируют амплитуду (215) сигнала возбуждения на основании амплитуды (214) сигнала датчика; и
включают амплитуду (215) сигнала возбуждения в сигнал возбуждения.
26. Способ по п.21, дополнительно содержащий этапы, на которых
принимают член Acosωt, представляющий сигнал (210) датчика;
генерируют член Asinωt из фазового сдвига;
возводят в квадрат член Acosωt и член Asinωt;
извлекают квадратный корень из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt для того, чтобы определить амплитуду (214) сигнала датчика;
генерируют амплитуду (215) сигнала возбуждения на основании амплитуды (214) сигнала датчика; и
включают амплитуду (215) сигнала возбуждения в сигнал возбуждения.
27. Способ по п.21, причем генерирование амплитуды (215) сигнала возбуждения дополнительно содержит этапы, на которых
принимают член Acosωt, представляющий сигнал (210) датчика;
генерируют член Asinωt из фазового сдвига;
возводят в квадрат член Acosωt и член Asinωt;
извлекают квадратный корень из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt для того, чтобы определить амплитуду (214) сигнала датчика;
сравнивают амплитуду (214) сигнала датчика с базой (216) отсчета амплитуды;
масштабируют амплитуду (214) сигнала датчика для того, чтобы генерировать амплитуду (215) сигнала возбуждения, причем масштабирование является основанным на сравнении амплитуды (214) сигнала датчика с базой (216) отсчета амплитуды; и
включают амплитуду (215) сигнала возбуждения в сигнал возбуждения.
28. Способ по п.21, дополнительно содержащий этап, на котором осуществляют частотную линейную модуляцию сигнала возбуждения при вводе расходомера (5) в действие.
29. Способ по п.21, дополнительно содержащий этап, на котором осуществляют частотную линейную модуляцию сигнала возбуждения при вводе расходомера (5) в действие, причем осуществление частотной линейной модуляции состоит в том, что осуществляют ступенчатое качание частоты через два или более частотных диапазонов до тех пор, пока расходомер (5) не запускается.
30. Способ по п.21, дополнительно состоящий в том, что линеаризуют сигнал возбуждения.
31. Способ по п.25, дополнительно содержащий этапы, на которых
рассчитывают вторую амплитуду с использованием пикового детектирования;
сравнивают амплитуду (214) сигнала датчика со второй амплитудой; и
регистрируют широкополосный шум на датчике перемещений, если вторая амплитуда выше, чем амплитуда (214) сигнала датчика.
32. Способ для генерирования сигнала возбуждения для вибрационного расходомера (5), способ содержит этапы, на которых
принимают сигнал (210) датчика из вибрационного расходомера (5);
сдвигают по фазе сигнал (210) датчика, по существу, на 90°, чтобы создавать сдвинутый по фазе сигнал датчика;
определяют значение (θ) фазового сдвига по частотной характеристике колебательного расходомера (5);
объединяют значение (θ) фазового сдвига с сигналом (210) датчика и сдвинутым по фазе сигналом датчика для того, чтобы генерировать сигнал возбуждения;
определяют амплитуду (214) сигнала датчика по сигналу (210) датчика и сдвинутому по фазе сигналу датчика; и
генерируют амплитуду (215) сигнала возбуждения на основании амплитуды (214) сигнала датчика, при этом фаза (213) сигнала возбуждения, по существу, идентична фазе (212) сигнала датчика.
33. Способ по п.32, в котором сдвиг по фазе выполняют посредством преобразования Гильберта.
34. Способ по п.32, причем значение (θ) фазового сдвига содержит значение компенсации.
35. Способ по п.32, причем определение значения (θ) фазового сдвига состоит в том, что осуществляют линейную корреляцию частотной характеристики с отношением частота/фаза для того, чтобы вырабатывать значение (θ) фазового сдвига.
36. Способ по п.32, причем определение амплитуды (214) сигнала датчика содержит этапы, на которых
принимают член Acosωt, представляющий сигнал (210) датчика;
генерируют член Asinωt из фазового сдвига;
возводят в квадрат член Acosωt и член Asinωt; и
извлекают квадратный корень из суммы возведенного в квадрат члена Acosωt и возведенного в квадрат члена Asinωt для того, чтобы определять амплитуду (214) сигнала датчика.
37. Способ по п.32, причем генерирование амплитуды (215) сигнала возбуждения дополнительно содержит этапы, на которых
сравнивают амплитуду (214) сигнала датчика с базой (216) отсчета амплитуды; и
масштабируют амплитуду (214) сигнала датчика для того, чтобы генерировать амплитуду (215) сигнала возбуждения, причем масштабирование является основанным на сравнении амплитуды (214) сигнала датчика с базой (216) отсчета амплитуды.
38. Способ по п.32, дополнительно содержащий этап, на котором осуществляют частотную линейную модуляцию сигнала возбуждения при вводе расходомера (5) в действие.
39. Способ по п.32, дополнительно содержащий этап, на котором осуществляют частотную линейную модуляцию сигнала возбуждения при вводе расходомера (5) в действие, причем осуществление частотной линейной модуляции состоит в том, что осуществляют качание через два или более частотных диапазонов до тех пор, пока расходомер (5) не запускается.
40. Способ по п.32, дополнительно содержащий этап, на котором линеаризуют сигнал возбуждения.
41. Способ по п.32, дополнительно содержащий этапы, на которых
рассчитывают вторую амплитуду с использованием пикового детектирования;
сравнивают амплитуду (214) сигнала датчика со второй амплитудой; и
регистрируют широкополосный шум на датчике измерения, если вторая амплитуда выше, чем амплитуда (214) сигнала датчика.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 5009109 A, 23.04.1991 | |||
| RU 2003127832 A, 27.02.2005. | |||

