Изобретение относится к средствам измерения физических параметров морской среды, которые используют для определения раздифферентованности подводных лодок (ПЛ) при их движении на заданном горизонте и изменении глубины погружения в сложных гидрологических условиях.
Оно может также применяться на отрывных зондах, выпускаемых из ПЛ для получения гидрологического разреза по вертикали, а также на буйковых станциях для контроля солености и плотности морской воды на горизонте нахождения измерительного датчика.
Известны средства контроля параметров морской среды - температуры Т, давления Р (глубины η), электропроводности J и скорости звука С, которые непосредственно инструментально могут измерять.
В качестве средств контроля гидрофизических параметров используют, например, интегральные термосолинографы (индуктивный датчик солености S и платиновый термометр сопротивления для регистрации температуры Т), регистраторы профиля электропроводности (по которой определяют соленость S) и температуры, океанические (глубоководные) модули давления и температуры, имеющие внутренние эталоны самокалибровки, высококачественные зондирующие устройства (Mark-IIIC, SBE-19 и др.), позволяющие производить измерения температуры и электропроводности (солености) с высоким разрешением и точностью.
На практике на точность измерения параметров среды оказывает влияние инерционность измерительных приборов, зависящая от скорости движения в среде, ориентации датчика прибора относительно вектора скорости, наличия защитных экранов (увеличивается тепловая инерционность), а также перекрестное влияние разных параметров на одни и те же величины. В результате при расчете солености по измеренной электропроводности и температуре может возникнуть ложная структура солености ("salinity spiking") (Лазарюк А.Ю., Пономарев В.И. "Согласование вертикальных профилей" СТД зондирования с целью устранения ложной структуры солености в слое скачка температуры". ТИНРО им. В.И.Ильичева ДВО РАН. Электронный журнал "ИССЛЕДОВАНО В РОССИИ", с.718-728). Приходится делать согласование вертикальных профилей СТД зондирования с целью устранения ложной структуры солености в слое скачка температуры. Указанные факторы в совокупности влияют на точность определения параметров среды и управление движением ПЛ.
Для задач удифферентования ПЛ на горизонте движения важно знать плотность воды и ее приращение при изменении глубины, причем с погрешностью на более 0,1 кг/м3 при средней плотности воды в океане 1020 кг/м3. Если плотность воды изменится на δρ≥0,1 т/м3, то ПЛ, которая под водой должна плавать с нулевой плавучестью, на каждые 1000 м3 водоизмещения потяжелеет или облегчится не менее чем на 0,1 т. При водоизмещении современных ПЛ это может составить несколько тонн. Технических средств, способных измерить плотность на ПЛ "in citu" с потребной точностью, не существует. Поэтому плотность морской воды вычисляют косвенным путем по океанологическим таблицам или эмпирическим полиномам, используя значения температуры Т, солености S и глубины η (давления). Соленость с необходимой для подводного плавания точностью также непосредственно не измеряется. Ее вычисляют косвенно по измерениям электропроводности, температуры и давления (глубины).
Знание солености, а не только плотности, имеет самостоятельное значение в проблеме оценки причин ее изменения и принятия решения на удифферентование ПЛ при плавании, например, во фронтальных зонах вод разной температуры и солености, вблизи тающих льдов. Если изменение плотности вызвано изменением температуры, то после удифферентования ПЛ ее статическое равновесие через некоторое время нарушится из-за остывания (нагрева) воды в цистернах главного балласта и уменьшения (увеличения) объема прочного корпуса. Если причина в изменении солености, вторичных нарушений дифферентировки не будет.
Как следует из изложенного выше, ни плотность морской воды, ни соленость инструментально "in citu" не определяются. Однако существует большое число эмпирических полиномов, связывающих с разной погрешностью плотность морской воды ρ и скорость звука С с температурой, соленостью и давлением (глубиной η). Узаконены ЮНЕСКО международные полиномы для ρ и С, содержащие более 40 членов и дающие минимальную погрешность в широком диапазоне изменения Т, S и η. (UNESCO technical papers in marine science - 44. Endorsed by Unesco/SCOR/ICES/IAPSO Joint Panel on Jceanographic Tables and Standards and SCOR Working Group 51. 1983. UNESCO technical in marine science Algorithms for computation of fundamental properties of seawater. UNESCO, 1983.)
Наличие 2-х стандартных международных полиномов для плотности и скорости звука, по-разному зависящих от S, Т и η, позволяет путем совместного их решения на компьютере рассчитать и построить номограмму, связывающую соленость S и плотность ρ со скоростью звука С0 при атмосферном давлении и температуре Т. Такая номограмма, рассчитанная и построенная авторами, показана на фиг.1. Войти в эту номограмму нужно с С0=Сизм-16,3·10-3η-1400, где Сизм - измеренная на глубине η скорость звука в м/с, а 16,3·10-3 - поправка увеличения давления на глубине η, и температурой Т. Этой номограммой могут воспользоваться подводники существующих ПЛ, имеющих штатные ИСЗ и измерители температуры. Номограмма может считаться контрольной для всех других вычислений по более простым полиномам.
К числу таких полиномов для плотности можно отнести приведенный ниже

где:
ρ - плотность, кг/м3;
Т - температура, °С;
S - соленость, ‰;
η - глубина, м.
Этот полином дает вполне приемлемый для подводного плавания результат вблизи Тcp≈10°С и Scp=25‰ при 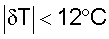 и
и 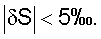 Но чтобы воспользоваться этой и подобными формулами, нужно знать соленость.
Но чтобы воспользоваться этой и подобными формулами, нужно знать соленость.
Существующие в настоящее время способы ее определения основаны на измерении электропроводности и температуры,
В известном отечественном способе определения плотности (А.Н.Шполянский. "Система измерительная гидрологическая. Руководство по эксплуатации СЗМС". СПб., "Гранит-7", 2003) плотность определяют следующим путем: замеряют электропроводность, температуру и глубину, по электропроводности, температуре и глубине определяют соленость, а затем по известным полиномам расчетным путем - плотность. Этот способ принят в качестве наиболее близкого аналога.
Недостатком известного способа является зависимость результата от погрешностей определения температуры Т и солености S, которая определяется через электропроводность. Однако задача определения солености может быть решена на основе измерения скорости звука и использования ее зависимости от температуры, солености и давления, например, по полиномам Дель-Гроко или Вильсона (см. Комляков В.А. СПб., Наука, 2003, "Корабельные средства измерения..."), приводимого ниже.

Задачей изобретения является оптимизация и упрощение процедуры определения солености и плотности морской воды за счет одновременного измерения температуры, скорости звука и глубины на горизонтах движения ПЛ, повышений надежности и оперативности способа, а также расширение его возможностей за счет получения дифференциальных характеристик солености и плотности в режиме стабилизации заданного горизонта движения ПЛ при изменении скорости звука и температуры.
Задача решена тем, что в известном способе определения плотности морской воды, включающем измерение температуры морской воды на заданной глубине, согласно предложенному изобретению возбуждают акустическое излучение, измеряют скорость принятого акустического излучения на заданной глубине при помощи измерителя скорости звука (ИСЗ) и из совместного решения точных стандартных полиномов ЮНЕСКО для плотности и скорости звука находят соленость и плотность или определяют соленость по формуле:

где:
S - соленость, ‰;
С - скорость звука, м/с;
Т - температура морской воды, °С;
η - глубина, м,
затем определяют плотность по формуле:

где:
ρ - плотность, кг/м3;
Т - температура морской воды, °С;
S - соленость, ‰;
η - глубина, м.
Для ПЛ в режиме стабилизации заданной глубины, на которой плотность ρ0, соленость S0 и скорость звука С0 были уже определены и ПЛ удифферентована, важно контролировать изменение солености δS от S0 и плотности δρ (δT, δС, δη) от ρ0. Для этого режима при движении ПЛ в сравнительно однородной среде характерны небольшие изменения δT, δC, δη. Поэтому могут быть с успехом применены дифференциальные методы и изменение солености определяют по формуле:

где:
δS - изменение солености, ‰;
δС - изменение скорости звука, м/с;
δТ - изменение температуры, °С;
относительно значений S0, C0 и Т0 в момент то начала режима стабилизации глубины τ0, а изменение плотности определяют по формуле:

где:
δρ - изменение плотности, кг/м3;
δТ - изменение температуры, °С;
Т0 - температура на заданной глубине, °С;
S0 - соленость на заданной глубине, ‰;
δS - изменение солености, ‰;
δη - изменение глубины, м.
Кроме того, в качестве акустического излучения используют ультразвуковые волны и скорость звука измеряют при помощи импульсно-циклического измерителя скорости звука Е.Д. Попова.
Кроме того, при определении плотности морской воды на ПЛ измерения скорости акустического излучения и температуры проводят одновременно на трех уровнях, соответствующих уровням ограждения рубки, носовой части ПЛ и под днищем ПЛ.
Таким образом, заявленный способ определения солености и плотности морской воды на основе измерения температуры, глубины и скорости звука позволяет исключить измерение электропроводности и упростить получение необходимой для подводного плавания информации. Кроме того, в предложенном способе предусмотрено 2 режима измерения: при маневре изменения глубины и в режиме стабилизации заданной глубины, в котором все параметры морской воды будут изменяться сравнительно мало. Для определения необходимых изменений солености и плотности предусматривается изменение чувствительности измерительных приборов. Все это обеспечивает существенный положительный эффект. Патентный поиск не выявил аналогичных технических решений.
Предлагаемый способ технически реализуем с помощью следующих технических элементов (см. схему на фиг.2).
1 - Импульсно-циклического измерителя скорости звука С, измеряющего "in citu" скорость звука в воде на горизонте нахождения подводного объекта (ПО).
2 - Измерителя средней температуры Т на горизонте нахождения ПО; таких измерителей в настоящее время известно много (см., например, А.В. Комляков).
3 - Измерителя давления (глубины).
4 - Микропроцессора, на котором реализованы алгоритмы расчета солености S и плотности ρ по скорости звука С, температуре Т и глубине η на основе сертифицированных полиномов для скорости звука и плотности воды или по предложенным упрощенным полиномам, а также их небольшого изменения в режиме стабилизации заданной глубины на основе дифференциальных алгоритмов; при этом учитывается сложная зависимость скорости звука при ультразвуковых колебаниях от температуры и солености (Х. Кухлинг. Справочник по физике. Пер с нем. М., Мир, 1982, с.253).
5 - Регистрационного прибора для вывода на дисплей или в систему автоматического удифферентования ПЛ текущего значения скорости звука, солености и плотности как функцию глубины и времени.
6 - Блока переключения режимов погружения - всплытия и стабилизации с разной чувствительностью измерительных приборов.
Предложенный способ работает следующим образом.
1. На неизменном или изменяемом горизонте нахождения подводного объекта одновременно «in citu» измеряют в виде электрических сигналов: температуру морской воды Т в °С, глубину η в м и скорость звука в морской воде С в м/с.
2. Полученные значения Т, η и С подают в микропроцессор, в котором реализован алгоритм определения солености S и плотности ρ морской воды на основе стандартных многочленных полиномов ЮНЕСКО или (при меньшей потребной точности) на основе укороченных эмпирических полиномов (3) и (4).
3. Измеренные значения скорости звука С, температуры Т и рассчитанные значения солености S и условной плотности (ρ-1000) кг/м3 выводят на дисплей и в дальнейшем используют для различных целей (например, накопление в памяти автономной буйковой станции или в системе автоматической поддифферентовки ПЛ при изменении температуры, солености воды и глубины ее погружения).
4. Для режима стабилизации глубины η0, на которой указанным выше способом были определены плотность ρ0 морской воды, ее соленость S0 и скорость звука С0 и ПЛ удифферентована в этой плотности, производят переключение расчетного алгоритма на определение изменения солености δS и плотности δρ от их значений S0 и ρ0 при изменении глубины δη, температуры δТ и скорости звука δС от их зафиксированных значений, и изменение солености δS определяют по формуле (5), а плотности - по формуле (6).
Ниже приводятся сравнительные данные расчетов по точным и приближенным выражениям для солености, плотности и их изменений.
А. Пусть, например, на глубине η=10 м приборы зафиксировали Т=18°С и С=1496 м/с. Точное решение по полиномам ЮНЕСКО дает S=17,37‰, ρ=1011,86. Приближенное решение по формулам (3) и (4) дает S=17,53‰, ρ=1011,7 кг/м3.
Б. Пусть после этого подводный объект погрузился на глубину 70 м, на которой оказалась температура Т=10°С и скорость звука С=1470 м/с. Точное решение по полиномам ЮНЕСКО дает S0=17,71‰, ρ=1013,81 кг/м3. Решение по формулам (3) и (4) дает S=17,63‰, ρ≈1013,82 кг/м3 (вблизи Т=10°С и С=1470 точность приближенных полиномов существенно повышается).
В. Режим стабилизации на η0=70 м. ИСЗ зафиксировал увеличение скорости звука на δС=2 м/с при неизменной температуре и глубине. Расчет по формуле (5) дает увеличение солености δS=1,0‰, а увеличение плотности δρ по формуле (6) - 0,77 кг/м3. Этот пример подчеркивает высокую чувствительность солености и плотности к изменению скорости звука. Поэтому и предусмотрены 2 режима использования предлагаемого способа: для режима маневра изменения глубины и режима ее стабилизации. В этих режимах предусматриваются разные коэффициенты усиления измерителей глубины, скорости звука и температуры, а в устройстве для реализации способа - блок переключения режимов. Это также обеспечивает существенное положительное отличие предлагаемого технического решения по сравнению с известными.
В качестве излучателя и устройства измерения скорости звука используют известный импульсно-циклический измеритель скорости звука Попова Е.Д. (Попов Е.Д. Импульсно-циклический измеритель скорости звука для гидрофизических исследований в море. Океанология, 1984, т.XXIV, вып.3). Особенностью известного прибора является замкнутость системы акустических измерений пределами кольца малого диаметра, что позволяет локализовать область измерения, уменьшить влияние флуктуации плотности при сжатии среды под действием звуковых волн и обеспечить малый шум и скрытность измерений, существенные для ПЛ.
Датчики температуры и давления, имеющие аналоговый выход, могут быть выбраны из широкой номенклатуры используемых ныне приборов (регистратор температуры CTR7 до глубин 2000 м, океанический модуль давления ОРМ до глубин 7000 м и др.). Вычислительный комплекс, обрабатывающий сигналы датчиков в соответствии с предложенным способом, обеспечивает вычисление значений параметров, а также, при необходимости, выработку управляющих сигналов для систем погружения-всплытия ПЛ.
Использование миниатюрных датчиков параметров среды позволяет выполнить пилоны для их крепления длиной 60-80 см и 6-8 см в диаметре, что практически не будет влиять на гидродинамическое сопротивление движению ПЛ. Эти пилоны устанавливают на трех горизонтах - на уровне ограждения рубки, носовой оконечности и под днищем, что обеспечивает контроль за началом вхождения в неоднородный слой среды на постоянной глубине и вхождение в слой скачка температуры и солености при погружении и всплытии ПЛ.
Предложенный способ определения солености и плотности морской воды на основе измерения температуры, глубины и скорости звука позволяет исключить измерение электропроводности и упростить и ускорить процесс получения необходимой информации, а также расширить его возможности за счет получения дифференциальных характеристик солености и плотности в режиме стабилизации заданного горизонта движения ПЛ и за счет измерения скорости звука и температуры на трех уровнях глубины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Методика верификации измерений солености морской воды автоматическими средствами измерений | 2020 |
|
RU2747739C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| СПОСОБ АКУСТИЧЕСКОГО МОНИТОРИНГА ИЗМЕНЧИВОСТИ ПАРАМЕТРОВ МОРСКИХ АКВАТОРИЙ | 2014 |
|
RU2563317C1 |
| Способ автоматического определения в условиях океана параметров состояния морской воды | 1976 |
|
SU717633A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ СЛОЯ СКАЧКА ПЛОТНОСТИ МОРСКОЙ ВОДЫ | 1991 |
|
RU2014587C1 |
| АВТОНОМНЫЙ ДРЕЙФУЮЩИЙ БУЙ ДЛЯ ОПЕРАТИВНОГО ГИДРОЛОГИЧЕСКОГО МОНИТОРИНГА | 2023 |
|
RU2825744C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2012 |
|
RU2495448C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ В УСЛОВИЯХ ОКЕАНА ПАРАМЕТРОВ СОСТОЯНИЯ МОРСКОЙ ВОДЫ | 2020 |
|
RU2754107C1 |
| Способ автоматического определения в условиях океана параметров состояния морской воды | 1985 |
|
SU1259158A2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
Использование: для определения солености и плотности морской воды. Сущность заключается в том, что для определения солености и плотности морской воды на горизонте нахождения подводного объекта осуществляют локальное измерение температуры воды на заданной глубине, возбуждают акустическое излучение и измеряют непосредственно скорость звука принятого акустического излучения с помощью импульсно-циклического ультразвукового измерителя скорости звука и по непосредственно измеренной на этой глубине скорости звука и температуре по соответствующим математическим выражениям находят соленость и плотность морской воды. Технический результат: повышение точности определения солености и плотности морской воды. 4 з.п. ф-лы, 2 ил.
S≈(C-1449-4,57T+0,0445T2-16,310-3η):(1,4-0,011T)-35,
где S - соленость, ‰;
С - скорость звука, м/с;
Т - температура морской воды, °С;
η - глубина, м,
затем, по солености, температуре и давлению (глубине) определяют текущую плотность ρ по формуле
ρ=1028,14-0,07Т-0,00486Т2-(0,802-0,00283Т)(S-35)+0,0045η,
где ρ - плотность, кг/м3;
Т - температура морской воды °С;
S - соленость, ‰;
η - глубина, м.
δS≈[δC-4,575δT(1-0,0195T0)-0,011(S0-35)-0,0163δη]:(1,4-0,011T0),
где δS - изменение солености, ‰;
δС - изменение скорости звука, м/с;
δТ - изменение температуры, °С;
Т0 - температура на заданной глубине, °С;
S0 - соленость на заданной глубине, ‰;
δη - изменение глубины, м,
а контроль за изменением плотности осуществляют при помощи формулы
δρ≈-0,07δT[1+0,138T0+0,00283(S0-35)]+0,802δS+4,5·10-3δη,
где δρ - изменение плотности, кг/м3;
δТ - изменение температуры, °С;
Т0 - температура на заданной глубине, °С;
S0 - соленость на заданной глубине, ‰;
δS - изменение солености, ‰;
δη - изменение глубины, м.
| Устройство для определения параметров состояния морской воды в натурных условиях | 1990 |
|
SU1737330A1 |
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2300479C2 |
| Морской зондирующий геофизический комплекс | 1978 |
|
SU868434A1 |
| Способ измерения физических свойств жидкостей и устройство для его осуществления | 1983 |
|
SU1239586A1 |
| Способ автоматического определения в условиях океана параметров состояния морской воды | 1976 |
|
SU717633A1 |
| JP 7140133 A, 02.06.1995 | |||
| JP 5026853 A, 02.02.1993 | |||
| JP 4048255 A, 18.02.1992. | |||

