(54) МОРСКОЙ ЗОНдаРУЮЩИЙ ГИДРОФИЗИЧЕСКИЙ КОМПЛЕКС


| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| Зондирующий комплекс профиля скоростей течения | 1982 |
|
SU1070484A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2011 |
|
RU2466432C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2008 |
|
RU2376653C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Термогалинозонд | 1986 |
|
SU1467428A1 |
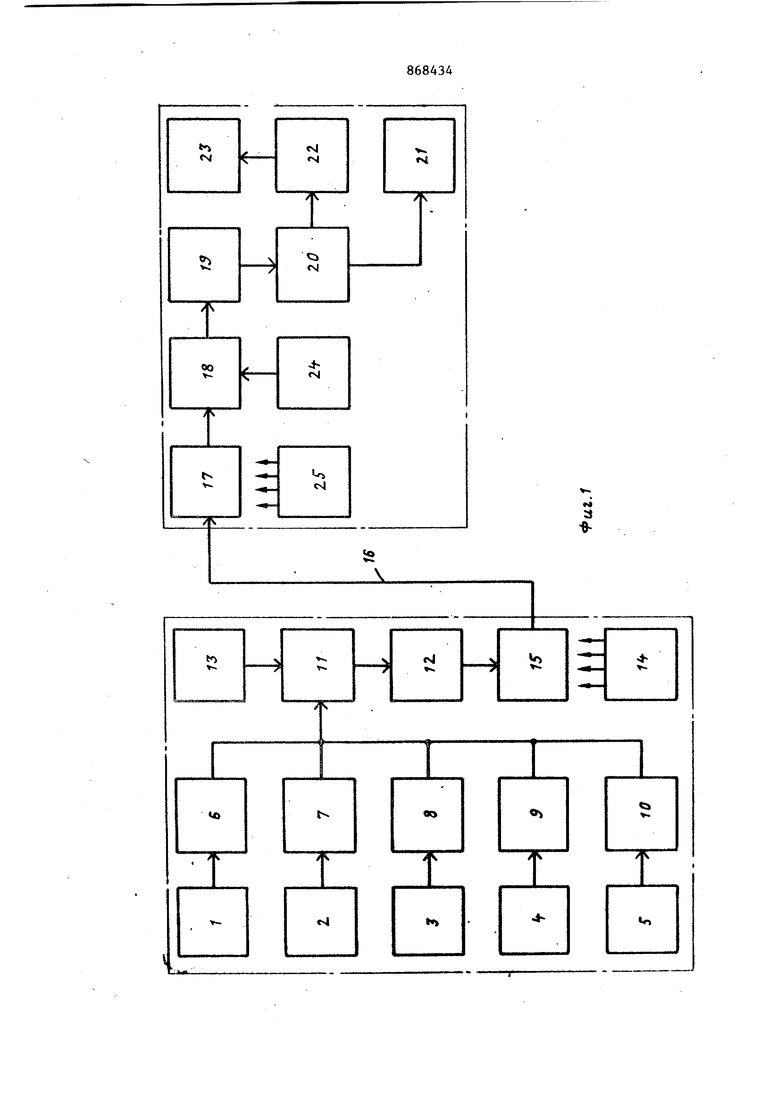
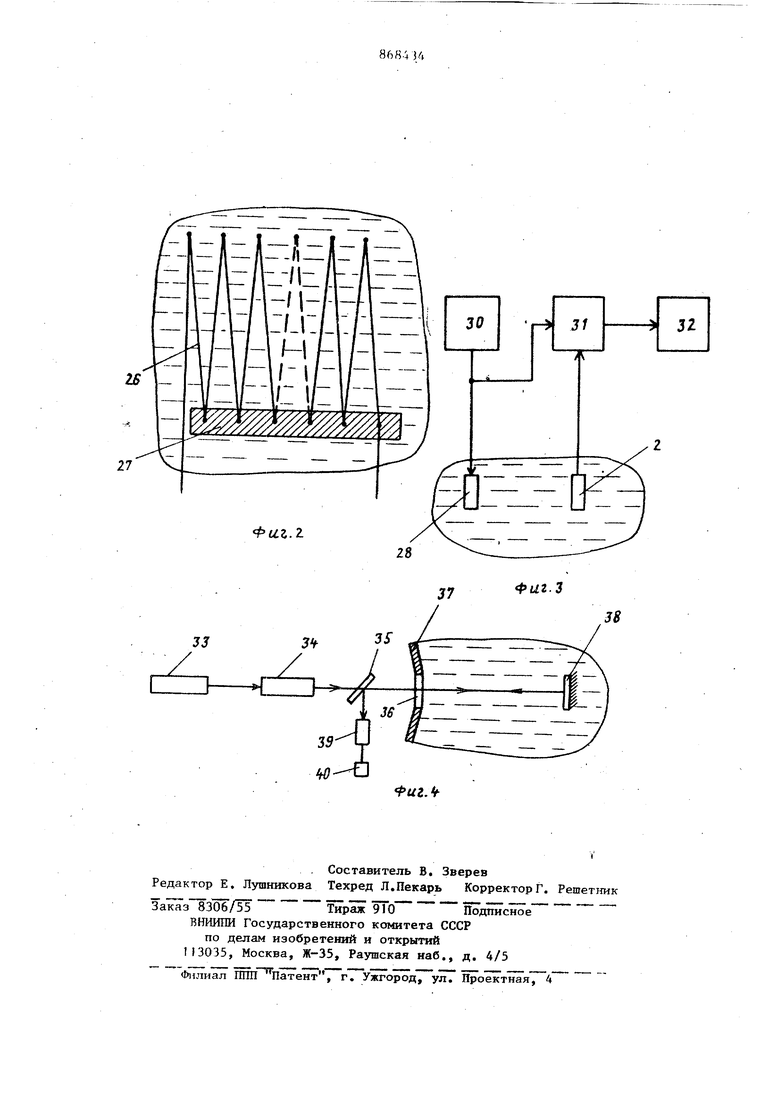
Изобретение относится к измерительной технике, а более конктерно к автоматизированным зондирующим гидрофизическим аппаратам, предназиаченным для измерения параметров морской воды. Известен комплекс ASWEPS, содержащий подводную измерительную аппаратуру, устройства для спуска и подъема, СУДОВ5ПО регистрирующую и анализирующую аппаратуру. Комплекс обеспечивает измерение следующих параметров температуры от -2 до +40С с погрешностью ±0, давления от О до 05 кг/см с погрешностью 0,25% соленость от 32,5 до 37,5% с погрешностью 0,02%; скорость звука от 1372 до 1674 м/с с погрешностью 0,03 . Наиболее близким к предлагаемому является гидрофизический зондирующий комплекс дпя измерения параметров морской воды, который состоит из погружаемого и бортового устройства, соединенных трос-кабелем. Исток-J обеспечивает одновременную регистрацию следую1цих параметров: температуры от -2 до с погрешностью ±0,03°С и чувствительностью 0,01± +0, с инерционностью 1,0 с; электропроводности 13-68 мом/см с погрешностью ±0,03 мом/см и чувствительностью 0,01+0,005 мом/см; давле.ния от О до 200 кгс/см с погрешностью 0,5 кгс/см и чувствительностью О,1±0,05 кгс/см . Время измерения всех параметров 1,6 с. Внутри опускаемого герметичного контейнера размещены измерительные мосты, преобразователь аналоговых значений температуры, электропроводности и давления в пропорциональный двоичный код, устройство управления и синхронизации, блок связи с бортовым устройством и блок питания. Бортовая аппаратура содержит блок с погружаемым устройством, блок синхронизации приемного регистратора, четыре регистра памяти и преобраэо- ватель кодовых величин измеряемых параметров в аналоговые сигналы, блок связи с ЭВМ и регистрир тощим устройс вами Г27 , Указанные выше, гидрофизические комплексы производят измерение усредненных характеристик ср.еды, не. изменяя ик пульсационных характеристик. Для проведения современных исследо ваний морей и океанов узке недостаточно знать значения измеряемых величин. Большое значение в формировании и эволюции мелко- и крупномасштабных океанических структур, прогнозировав НИИ и своевременном обнаружении таки грозных явлений природы., как тайфун, цунаьш играют пульсационные характе- ристики морской (плотности, тe mepaтypы, солености и т.д.). Боль шинство же существующих океанографических приборов не обладают достаточным быстродействием и чувствитель ностью для регистрации быстрых изменений физических параметров. Цель изобретения - создание морского зондирующего комплекса, обеспечивающего высокочувствительное и мал инерционное измерение пульсаций скорости акустических колебаний Д V, где температуры ut, оптического показателя преломления йп, с последзтощим определением пульсаций плотности &р , солености Д С и адиабатической сжимаемости дЭс(д. Поставленная цель достигается тем что известный морской зондирзмщий гидрофизический комплекс, содержаний погружаемый контейнер с установленными на нем датчиком-усредненной температуры и .датчиком давлещш, Bbiходы которых через усилители подключены к одному из входов многоканального коммутатора, ко втором - входу которого подключен блок синхроьшзаци причем выход многоканального коммутатора через аналого-цифровой преобразователь и блок связи соединен с бортовым устройством, включаю11а1М последовательно соединенные блок входного преобразователя., коммутатор ко второму входу которого подключен блок синхронизации, блок регистров памяти, на выходе которогО подключены цифроаналоговьй преобразователь с регистратором и параллельно ему цифровое регистрирующее устройство, снабжен датчиком пульсаций температуры, датчиком пульсаций скорости 8 4 распространения акустических колебаний и датчиком пульсаций показателя преломления, которые вынесены в среду из погружаемого контейнера и установлены на его корпусе и чсфез усилители полсоединены к многоканальному коммутатору, а в бортовом устройстве между блоком регистров памяти и входами цифроаналогового преобразователя и цифрового регистрирующего устройства включен блок преобразования измеряемых пульсагшонных параметров в пульсации плотности, сжимаемости и солености морской воды (электронно-цифровой блок). Датчик пульсаций скорости распространения акустических колебаний содержит излучатель и приемник непрерывHbix акустических колебаний, установленные на корпусе погружаемого контейнера, а также умножитель разности частот принимаемьгх и излучаемых акустических колебаний, на выходе которого подключен фазовый детектор, размещенные в погружаемом контейнере. Аналоговая информация об измеряемых величинах преобразуется в цифровой код и по трос-кабелю передается на преобразователь кода бортового устройства. Через .коммутатор, разделяюпцш информацию по каналам, последовательный двоичный код подается на регистры памяти, откуда уже в параллельном виде поступает на электронно-цифровой блок. В предлагаемом устройстве введение электронно-цифрового блока служит для переработки входной информации о пульсациях скорости акустических колебаний, пульсациях температ тэы в ВЫХОДНУЮ информацию о пульсациях плотности, солености, адиабатической сжимаемости. Далее информация подается на цифровые и аналоговые регистрирующие устройства. На фиг.1 изображена структурная схема предлагаемого морского зондирующего гидрофизического комплекса; на фиг, 2-4 принципиальные cxeNthi датчиков пульсаций скорости ультразвука, пульсаций температуры и пульсаций оптического показателя преломления, соответственно. Структурная схема содержит датчик I средней температуры, датчик 2 нульсшлий температуры, датчик 3 пульсаций скорости акустических колебаний, датчик 4 пульсаций показателя преломления, датчик 5 да1 ге1тия н соотачтст-вующне датчикам усилтнтельно-измери тельные блоки 6-10, многоканальный коммутатор 11, аналого-1щфровой пр образователь 12, блок 13 синхрониз ции, блок 14 Г1ита™я, блок 15 связ с бортовым устройством, линию 16 с зи, блок 17 выходного преобразовани коммутатор 18, блок 19 регистров п мяти, электронно-цифровой блок 20, блок 21 цифровой регистрации, цифро аналоговый преобразователь 22, блок аналоговый оегистоацчи, блок 24 син ронизации, блок 25 питания. Аналоговые сигналы с датчиков 1-5 параметров морской среды, усиленные и преобразованные соответствующими усилительно-измерительными блоками 6-10, поступают на многоканальный аналоговый коммутатор 11. Коммутация напряжений на аналогоцифровой преобразователь 12 происходит по синхроимпульсам, поступаю1Щ1М с блока 13 синхронизации. Аналого-цифровой преобразователь преобразует аналоговые величины в соответствующий двоичный последовательный код. Цифровой код в блоке 15 связи с бортовым устройством контролируется по частоте и передается по трос-кабелю 16 на блок 17 входного преобразования бортового устройства, который демодулирует поступающий двоичный код и подает его на коммутатор 18 бортового устройства. Работа коммутатора 18 синхронизируется блоком 24 синхоонизации с работой блоков погружаемого устройства. Далее информация заносится в регистры 19 памяти, откуда в параллельном двоичном коде пода ется на электронно-цифровой блок 20, где информация о плотности, солености и сжимаемости преобразуется в функциональную зависимость. В дальнейшем информация в виде параллельного, кода поступает на блок 21 цифровой регистрации или через цифроаналоговый преобразовател 22 записывается на блоке 23 аналоговой регистрации. Питание бортового устройства осуществляется через блок 25 питания. В качестве датчика пульсаций температуры (фиг.2) используется дифференциальная гипертермопара 26, изготовленная из 15 хромелькопелевых микротермопар с диаметром проводов 0,05 мм. Чувствительность такого датчика составляет O., а постоян . няя времени - 0,. 1пя компенсации постоянной составляющей температуры часть спаев термопары помещается в металлическую гильзу 27 с боль- шой тепловой инерцией. Таким образом, датчик пульсаций температуры реагирует на изменение температуры во времени с периодом менее 10 мин. Колебания температуры с большим периодом регистрируются датчиком 2 (фиг.) усредненной температуры, в качестве которого используется термистор, помещенный в металлическую гильзу с тепловой инерцией, близкой к тепловой инерции гильзы 27. Датч1 к пульсаций скорости распространения акустических колебаний морской среды показан на фиг.З. Дпя этой цели используется регистрация нестационарных частотноф 1зовых сдвигов акустических колебаний, возникающих за счет простоанственно-временных изменений CBOIICTB морской среды, которые влияют на скорость распространения акустических волн. Применение указанных методов позволяет измерять малые приращения скорости акустических колебаний. В качестве излучателя 28 и приемника 29 акустических волн используются пьезокерамические преобразователи, жестко установленные в откры ТОМ металлическом Koonvce, вынесенном из погг%гженного контейнера в морскую среду. Электронная часть состоит из задающего кварцованного генератора 30 гармонических колебаний фазового усилителя 31 излучаемых и принимаемых акустических сигналов и фазового детектора 32. Указанный датчик измеряет флуктуации скорости распространения акустических воли не хуже +1 мм/с при постоянной времени датчика 1СГ с. Датчик пульсаций показателя прелом- ления морской изображен на фиг.4. Принцип регистрации состоит в измерении отклонения светового луча, прошедшего через исследуемую среду на базе 1000 мм, которое возникает в результате поперечных градиентов показателя преломления. В качестве источника 33 света используется ампа накаливания с набором светоильтров и коллиматором 34 щелевого типа или оптический квантовый генеатор. Луч света от источиик с коллимирующей системой проходит чеea полупрозрачное зеркало 35, про- 7 зрачное окно 36, уТсрепленное в стенке контейнера 37 и попадает на зерка ло 38, вынесенное из контейнера в морскую среду. Отражаясь от зеркала 38, луч света через окно 36 понадает на зеркало 35 и затем через цилиндри ческую линзу 39 на позиционно-чувствительный фоторезистор 40, который используется в качестве чувйтвительного элемента. Флуктуация показателя преломления такой системой измеряются с разрешением +10 измеряемой величины и постоянной времени светоприемника 10 с. Рассмотрим, как из данных, получа мых от датчиков пульсаций скорости акустическихколебаний, пульсаций температуры и пульсаций показателя преломления получается информация о пульсациях плотности AJJ. , соленое тидС, адиабатической сжимаемости Л РОД Считаем P const, т.е. , что означает постоянство глубины погружения. Известно, что скорость акустических колебаний выражается
-i
{-)
pfb
dA
откуда A-vV Формула Лорентц-Лорентца дли показ теля прелом-пе гая )r( пЧа), (ъ) где п - показатель преломления ср г - удельная пpeлo mяющaя спо собность среды; - длина используемой светов ВОЛ1-1Ь1„ Отсюда , lbi± ) Для пульсаций скорости ультразвук и показателя преломления, продифф ренцировап (1) и (З), получаем . T-HaA f i (C,A)-V -f- - -f- (ioA , (n -t-Dr (., Разрешая рыражетте (б) относитель пульсации плотности, с учетом (4) получаем - . ... п) (. (nl-fll
ton t ,,
(-1) ;;d VI;С -t
(() o другой стороны, так как Piconst, , имеем dc 1,8) Если д 1апазон измерения температуры t и солености С небольшой, что имеет место в реальных условиях, то можно принять ,,.i d-fcj(-HAcdc), t где dt - коэффициент обьепн.ого расширения;3с. - коэффициент изменения плотности за счет солрности; Р(, - среднее значение плотности, соответствующее средним в процессе измерения температуре и солености. Учитывая, что р рр +с|р , вместо {9) получаем в линейном приближении (fo; Решая уравнение 10 относительно dc с использованием соотношения (7), Вьфаже1ше (11) дает связь между мгновенными., отклонениями С, h и от их средних значений. Эта формула используется при определении пульсационных характеристик солености морской воды. Используя соотношения (З) и (7), имеем 1 Г ... .. п 1C/V+V cf n И) I (n-i-iltna-i; Из приведенных выкладок видно, что измеряя пульсации теьтерат фы. пульсации скорости акустических колебаний, пульсаи ии показателя преломленяя, а также зная величины V,, п,р , с я . из выражений (7), (11) и (12) получаем пульсационные значения плотности, солености, сжимаемости. При этом нетрудно заметить, что для обеспечения высокой то ности при расчете указанных пульсационньгх характеристик абсолютные значения величин, входящие в форму1Ш (7), (П) и (12) достаточно знать приближенно. Действительно, из (7) легко получить df Ъп --с/п (-tS) (tiM ) Если в последнем выражеш1и показа1ел преломления задать с точн(тстьк) по второго знака после -чапяч-ой, и.чпри,33 и 1 ,34, то мер, взяв п,, коэффициент Ъп () ) получит значертя ,75; ,64, т.е. (l,T5-l,64;dn (15-) Коэффицтиент пропорциональности изменился всего лишь на 4%. Отсюда ясно, что для определения cLft по измеренному значению dn в формуле (6 в качестве п достаточно взять сре нее значение показателя преломления для морской воды или воспользоваться литературными данными для услови близких к реализованным в экспериме те. Аналогично с расчетом других пульсационных характеристик. Таким образом, отпадает необходимость в предлагаемом гидрофизическом компле се устанавливать,датчики для опреде ления абсолютных значений указанных параметров. Далее эта информация наряду с измеренными значениями пул сационных параметров преобразуется электронно -цифровым блоком в зависи мость и fWp, 4с.,с((Ьдд) в виде пара лельного двоичного кода и поступает на регистрирующие блоки или ЭВМ. Предлагаемый морской гидрофизический комплекс дает возможность с высокой чувствительностью и малой инерционностью получать информацию о пульсационных фоновых характерист ках морской среды, которые играют важную роль при прогнозировании мощ Ш;1Х океанических возмущений (Ураган тайфуны, цунами и др.). Это имеет важное народно-хозяйственное значение. В частности, при использовании современных систем обнаружения цунами, которые обладают недостаточно надежностью, значительньш процент объявляемых тревог оказываются лож ными. Одна ложнаятреетэга наносит материальный ущерб народному хозяйс ву до нескольких миллионов рублей. Имеют место случаи пропуска цунами без объявления тревоги. Использование предлагаемого комп лекса даст возможность создать системы более надежного прогнозирования цунами и исключения ложных тревог. Известно также, что, с уровнем пульсационного фона морской среды непосредственно связано наличие планктона и с:от ветственно сосредото 3410 . чеиие косяков рыб и других морских животных. Таким образом, по уровню пульсационнт,гх характеристик, которые могут быть зарегистрированы предлагаемым комплексом, можно судить о местах локализации скопления рыбы и ПОПЫСИТ1. проиэвоиительност т ее промысла. Формула изобретения 1. Морской зондирующий гидрофизический комплекс, содержащий погружаемый KOHTeiiHep с установленными на нем датчиком усредненной температуры и датчиком давления, выходы которых через усилители подключены к одному из входов многоканального коммутатора, ко второму входу которого гтодключен блок синхронизации, причем выход многоканального KOMhfyTaTopa через аналого-цифровой прйобразователь и блок связи соединен с бортовым устройством, вклкшающим последовательно соединенные блок входного преобразователя, коммутатор, ко второму входу которого подключен блок синхронизации, блок регистров памяти, на выходе которого подключены цифроаналоговый преобразователь с регистратором и параллельно ему цифровое регистрирующее устройство, о т л ичающийся тем, что, с целью повьш1ения чувствительности определения пульсаций плотности, снижаемости и солености морской воды путем одновременного измерения пульсаций температуры, скорости распространения акустических колебаний и оптического показателя преломления в каждой точке исследований с последующей обработкой полученных измерений, он снабжен датчиком пульсаций температуры, датчиком пульсаций скорости распространения акустических колебаний и датчиком пульсаций оптического показателя преломления с соответствующими усилителями, которые подсоединены к многоканальному коммутатору, а в бортовом устройстве между блоком регистров памяти и входами цифроанаогового преобразователя и цифрового регистрирующего устройства включен блок преобразования изменяемых пуль- сационных параметров в пульсации лоскости, сжимаемости и солености орской воды. 2. Комплекс поп.1, отлича юи и с я тем, что датчик пульсаций корости распространения акустических олебаний содержит умножитель частоты рименяемых, и излучаемых акустических
колебаний, к выходу которого подключен детектор.
Источники информации, принятые во внимание при экспертизе
868434
1,Маклаков А.Ф. и др. Океанографические приборы. Л. Гидl o teтeoнздат, 1975, с.141.
33
фиг.З
«#«г
