Изобретение относится к области океанологических исследований и может быть использовано при построении автономных и зондирующих устройств и для определения комплексных гидрофизических параметров морской воды океана, а также может быть использовано для контроля различных примесей, пузырьков газа, взвешенных твердых частиц не только в морской, но и в речных и сточных водах и для исследования физических свойств воды, смесей жидкостей и уточнения эмпирических выражений при определении термодинамических величин и молекулярных свойств жидкостей.
Известны способы определения взаимосвязанных гидрологических параметров морской воды путем измерения текущих значений электропроводности и температуры, вычисления других параметров, например, солености по различным эмпирическим формулам [Маклаков А.Ф. и др. Океанографические приборы. Л.: Гидрометеоиздат, 1975. С. 261-270].
Известен также способ автоматического определения в условиях океана параметров состояния морской воды: температуры, солености и плотности, путем синхронного измерения текущих значений двух из совокупности взаимосвязанных параметров и последующего вычисления значений других параметров [Маклаков А.Ф. и др. Океанографические приборы. Л.: Гидрометеоиздат, 1975. С. 54-59. С. 281-283].
Известен способ автоматического определения в условиях океана параметров состояния морской воды с целью повышения быстродействия и разрешающей способности при комплексном определении в квазиреальном масштабе времени средних и пульсационных значений температуры, солености и плотности, синхронно измеряют текущие значения оптического показателя преломления и скорости распространения звука [А.С. СССР 717633, Кл. G01N 21/46. Способ автоматического определения в условиях океана параметров состояния морской воды. Брамсон М.А., Гончаров Э.Г., Красовский Э.И., Митрофанов И.А., Морозова А.А., Федоровский А.Д.; Опубл. 25.02.80. Бюл. №7.].
К недостаткам известного способа относится то, что в указанном способе не определяются коэффициенты акустического поглощения, затухания, рассеяния и суммарный диссипативный коэффициент.
Целью предлагаемого изобретения является повышение разрешающей способности при комплексном определении в квазиреальном масштабе времени параметров состояния морской воды.
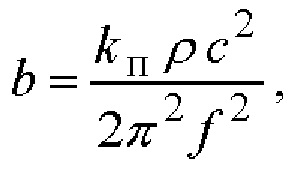
Задача решена тем, что в известном способе, где измеряется температура и скорость звука, дополнительно синхронно измеряют текущие значения акустических коэффициентов затухания и рассеяния на фиксированной частоте и стабильной измерительной базе, а также измеряют гидростатическое давление, после чего последовательно определяют плотность, соленость, коэффициент поглощения и суммарный диссипативный коэффициент
где b - суммарный диссипативный коэффициент;
kп - коэффициент поглощения, kп=kз-kp;
kз - коэффициент затухания;
kp - коэффициент рассеяния;
ρ - плотность морской воды;
с - скорость звука в воде;
ƒ - частота ультразвукового сигнала.
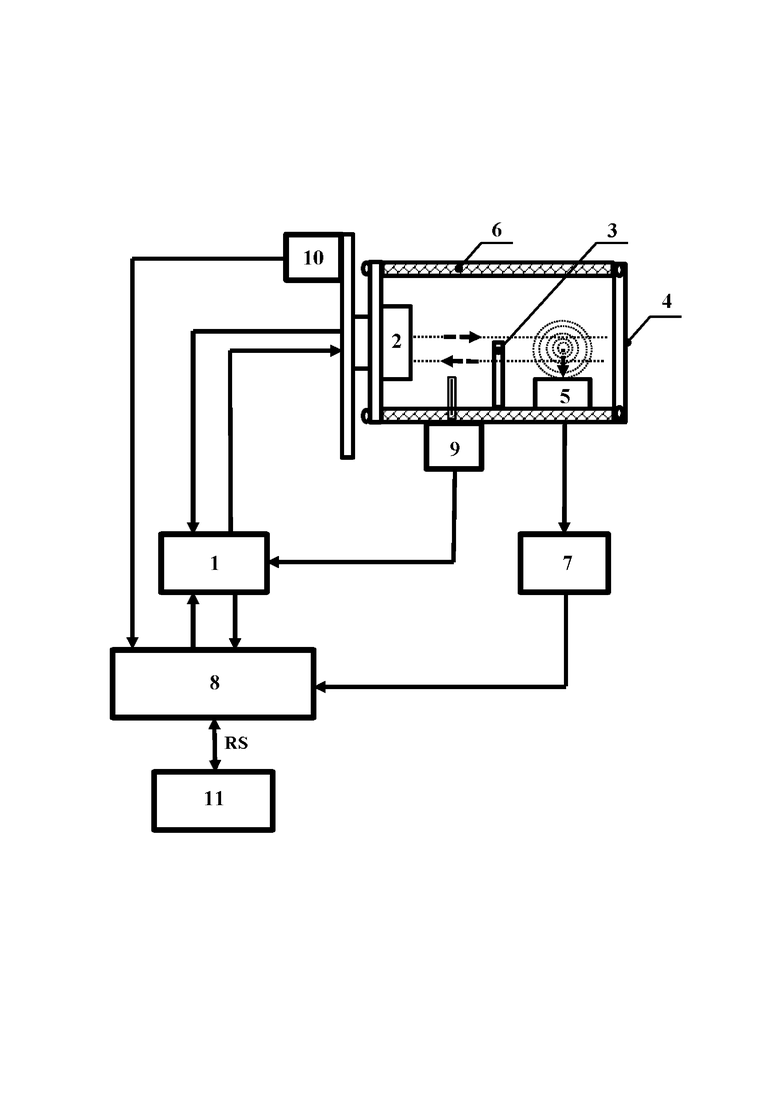
Для реализации предлагаемого способа должны быть использованы измерители температуры, скорости звука, давления, акустических коэффициентов затухания и рассеяния и частоты, которые расположены на хорошо промываемой стабильной измерительной базе, выполненной, например, из ситала, благодаря чему обеспечивается необходимое пространственно-временное разрешение. Структурно-функциональная схема измерителя представлена на фигуре, где изображены: 1 преобразователь временных и амплитудных сигналов; 2 - преобразователь ультразвука; 3 - половинчатый отражатель; 4 - полный отражатель; 5 - дополнительный акустический приемник; 6 - стабильная измерительная база; 7 - усилитель сигналов; 8 - блок управления; 9 - датчик температуры; 10 - датчик давления; 11 - ПЭВМ (персональная электронно-вычислительная вычислительная машина).
Представленная на фигуре схема работает следующим образом. Электрический сигнал с фиксированной частотой с преобразователя 1 поступает на преобразователь ультразвука 2, где преобразуется в акустический сигнал, который проходит через водную среду, отражается от первого половинчатого отражателя 3, затем отражается от полного отражателя 4 и оба отраженных акустических сигналов поступает на ультразвуковой преобразователь 2, где преобразуется в электрический сигнал, который поступает на преобразователь 1. По разности времен между излученным и отраженным сигналами определяется скорость звука, амплитуда приемного сигнала характеризует коэффициент затухания. Рассеянный акустический сигнал от неоднородностей поступает на дополнительный акустический приемник 5. Все отражатели 3, 4, акустический преобразователь 2, акустический приемник 5 расположены на стабильной измерительной базе (ситал) 6. Электрический сигнал с акустического приемника 5, амплитуда которого пропорциональна коэффициенту рассеяния, через усилитель 7 поступает в блок управления 8. В зоне прохождения акустических сигналов расположен малоинерционный датчик температуры 9, сигнал с которого поступает на преобразователь 1. Одновременно датчиком давления 10 измеряется гидростатическое давление, электрический сигнал с которого поступает в блок управления 8. Блок управления 8 формирует сигналы управления и одновременно осуществляет прием и преобразование сигналов в последовательный код, который через линию связи поступает в ПЭВМ 11, где происходит преобразование последовательного кода в значение температуры, гидростатического давления, скорости звука, затухания и рассеяния ультразвука, используя измеренные величины с учетом эталонной базы и фиксированной частоты, определяют плотность, соленость, коэффициент поглощения и суммарный диссипативный коэффициент.
Измерение скорости звука основано на времяпролетном методе измерений. Каждое измерение скорости звука выполняется с помощью одного акустического импульса, проходящего стабильную измерительную базу. В зависимости от длины измерительной базы, которая формируется за счет высокостабильных стержней из ситала или карбонового композитного материала, можно получить хорошее разрешение и точность по скорости звука.
При измерении коэффициента затухания необходимо знать начальную амплитуду UH и амплитуду отраженного сигнала U0 при известном расстоянии, и далее, используя формулу  рассчитывают коэффициент затухания kз.
рассчитывают коэффициент затухания kз.
Датчик скорости звука имеет два отражателя, поэтому определить амплитуду U0 проблем не составляет. Разность амплитуды сигналов между приемными сигналами от двух отражателей и будет характеризовать величину коэффициента затухания ультразвука в среде на длине базы между двумя отражателями.
Но учитывая то, что половинчатый отражатель имеет полупрозрачную конструкцию, коэффициент его отражения учитывается при градуировке прибора.
Схема измерения амплитуды сигнала осуществляется с помощью преобразователя TDC-GP30. Алгоритм измерения амплитуды работает следующим образом. После принятия отраженного сигнала пиковым детектором фиксируются пиковая амплитуда. Затем после окончания действия пакета импульсов приемного сигнала с помощью аналого-цифрового преобразователя с учетом наклона импульса определяется время его разряда в границах амплитуды от максимальной до установления уровня, в нашем случае 0,7.
По результатам измерения времени вычисляют амплитуду акустического сигнала по следующим формулам [Ultrasonic-Flow-Converter Data Sheet TDC-GP30 June 27th, 2019 Document-No: DB_GP30Y_Vol1_en V0.3 System-Integrated Solution for Ultrasonic Flow Meters Volume 1: General Data and Frontend Description (Available at https://ams.com/documents/20143/36005/TDC-GP30_DS000391_3-00.pdf/f96f8c8b-87e5-ac8d-a26c-65756fd240fa) (дата обращения: 03.06.2019)]:


где



Для измерения коэффициента рассеяния используют акустический приемник, который расположен под определенным углом на стабильной измерительной базе. В зависимости от количества находящихся примесей в воде уровень рассеянного акустического сигнала изменяется, и при соответствующей градуировке получаем коэффициенты апроксимирующей функции.
В качестве примера для расчета плотности приведем разработанное авторами новое уравнение

где γ=(ρ-ρ0)/ρ*;
τ=(Т-Т0)/Т*;
π=(Рабс-Р0)/Р*;
ω=(с-с0)/с*;
ρ0=990 кг/м3;
ρ*=100 кг/м3;
Т0=-10°С;
Т*=50°С;
Р0=0,101325 МПа;
Р*=120 МПа;
с0=1300 м/с;
с*=500 м/с.
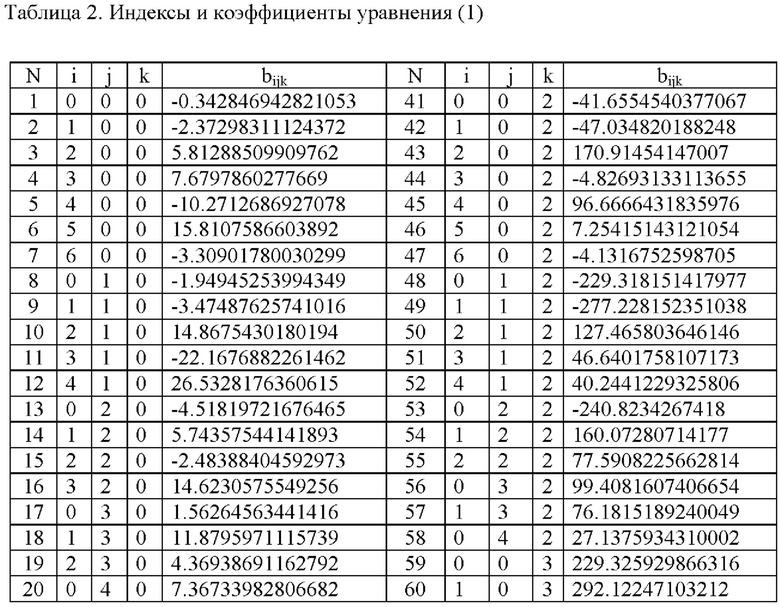
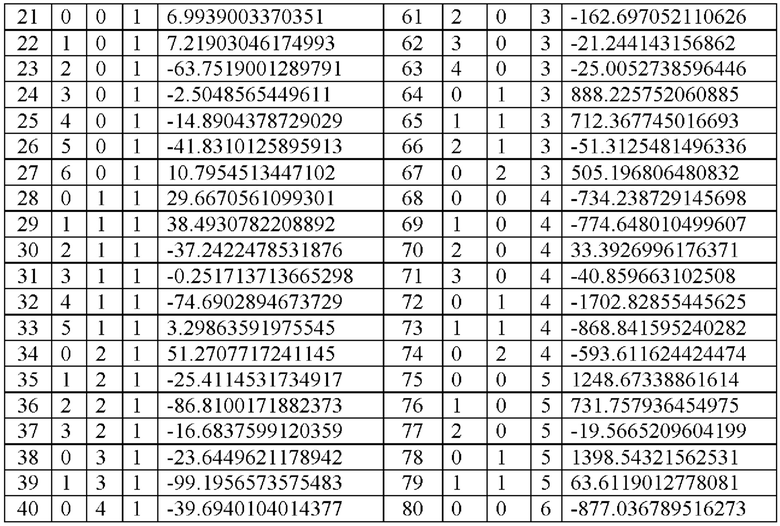
Для уравнения (1) использована индексная матрица, приведенная в табл. 1.

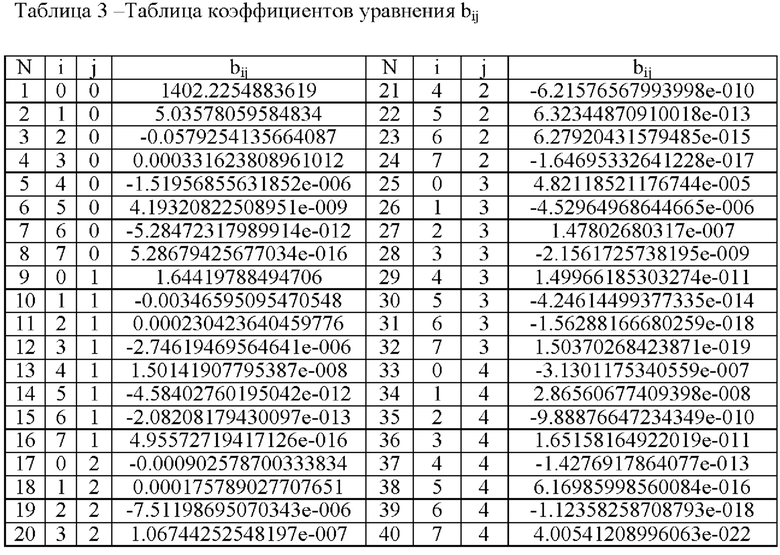
Здесь знак «+» означает, что данная комбинация индексов использована, а знак «-» означает, что данная комбинация индексов пропущена. Всего в данной индексной матрице использовано 80 комбинаций. Таким образом, уравнение (1) содержит всего 80 ненулевых коэффициентов. Коэффициенты bijk уравнения (1) были рассчитаны авторами по методу наименьших квадратов, и совместно с индексами приведены в табл. 2.
Для определения солености используется разработанное авторами уравнение скорости звука для соленой воды, включая пресноводную и солевую части

где для вычисления пресноводной части скорости звука используется уравнение

где Т - температура, °С;
Р - абсолютное давление, МПа.
Диапазон применимости: по давлению: от 0,101325 до 120,0 МПа; по температуре: от кривой плавления до 300°С.
Коэффициенты уравнения bij приведены в табл. 3.
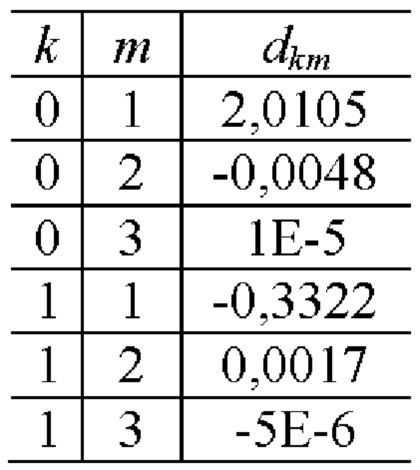
Для вычисления солевой части скорости звука используется уравнение

где dkm
Следовательно, используя синхронно измеренные значения температуры T, давления Р, скорости звука в воде с на фиксированной частоте ƒ, определяют по представленным алгоритмам плотность ρ и соленость S.
Измеренные коэффициенты рассеяния kp и затухания kз позволяют определить коэффициент поглощения kп=kз-kp, и далее определяется суммарный диссипативный коэффициент
где kп - коэффициент поглощения;
ρ - плотность морской воды;
с - скорость звука в воде;
ƒ - частота ультразвукового сигнала.
Все измеренные значения определяются на стабильной эталонной базе для малого объема жидкости, что позволяет повысить пространственную, а за счет синхронного измерения и временную разрешающую способность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМОДЕЛЬНОГО ОПРЕДЕЛЕНИЯ И СРАВНИТЕЛЬНОЙ ОЦЕНКИ ПРОФИЛЯ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2024 |
|
RU2837506C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| СПОСОБ АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА И ПОТОКА ЖИДКОСТИ ИЛИ ГАЗА ПРИ ИЗМЕНЕНИИ ОКРУЖАЮЩЕЙ ТЕМПЕРАТУРЫ | 2022 |
|
RU2801203C1 |
| Способ автоматического определения в условиях океана параметров состояния морской воды | 1976 |
|
SU717633A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2012 |
|
RU2495448C1 |
| Устройство для определения параметров состояния морской воды в натурных условиях | 1990 |
|
SU1737330A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
Изобретение предназначено для океанологических исследований и может быть использовано при построении автономных и зондирующих устройств для определения комплексных гидрофизических параметров морской воды, а также может быть использовано для контроля различных примесей, пузырьков газа, взвешенных твердых частиц не только в морской, но и в речных и сточных водах и для исследования физических свойств воды, смесей жидкостей и уточнения эмпирических выражений при определении термодинамических величин и молекулярных свойств жидкостей. Сущность изобретения заключается в том, что, используя синхронно измеренные значения температуры Т, давления Р, скорости звука в воде с, определяют по разработанному алгоритму плотность ρ и соленость S. Измеренные коэффициенты рассеяния kp и затухания kз позволяют определить коэффициент поглощения kп=kз-kp и далее определить суммарный диссипативный коэффициент  где kп - коэффициент поглощения; ρ - плотность морской воды; с - скорость звука в воде; ƒ - частота ультразвукового сигнала. Все измеренные значения определяются на стабильной эталонной базе для малого объема жидкости, что позволяет повысить пространственную, а за счет синхронного измерения и временную разрешающую способность. Технический результат - повышение разрешающей способности при комплексном определении в квазиреальном масштабе времени параметров состояния морской воды. 3 табл., 1 ил.
где kп - коэффициент поглощения; ρ - плотность морской воды; с - скорость звука в воде; ƒ - частота ультразвукового сигнала. Все измеренные значения определяются на стабильной эталонной базе для малого объема жидкости, что позволяет повысить пространственную, а за счет синхронного измерения и временную разрешающую способность. Технический результат - повышение разрешающей способности при комплексном определении в квазиреальном масштабе времени параметров состояния морской воды. 3 табл., 1 ил.
Способ определения в условиях океана температуры, солености и плотности морской воды путем синхронного измерения температуры, скорости звука, отличающийся тем, что с целью повышения разрешающей способности при комплексном определении в квазиреальном масштабе времени параметров состояния морской воды также синхронно измеряют акустическое затухание и рассеяние, гидростатическое давление на одной эталонной базе и фиксированной частоте, после чего, используя синхронно измеренные значения температуры, гидростатического давления, скорости звука в воде на фиксированной частоте, определяют плотность и соленость, а по измеренным коэффициентам рассеяния и затухания определяют коэффициент поглощения и далее определяют суммарный диссипативный коэффициент по зависимости:
где b - суммарный диссипативный коэффициент;
kп - коэффициент поглощения, kп=kз-kp:
kз - коэффициент затухания,
kp - коэффициент рассеяния;
ρ - плотность морской воды;
с - скорость звука в воде;
 - частота ультразвукового сигнала.
- частота ультразвукового сигнала.
| Способ автоматического определения в условиях океана параметров состояния морской воды | 1976 |
|
SU717633A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОЛЕНОСТИ И ПЛОТНОСТИ МОРСКОЙ ВОДЫ | 2007 |
|
RU2349910C1 |
| ОВОСКОП | 1929 |
|
SU15998A1 |
| CN 109974758 A, 05.07.2019 | |||
| СПОСОБ АКУСТИЧЕСКОГО МОНИТОРИНГА ИЗМЕНЧИВОСТИ ПАРАМЕТРОВ МОРСКИХ АКВАТОРИЙ | 2014 |
|
RU2563317C1 |
| Устройство для определения параметров состояния морской воды в натурных условиях | 1990 |
|
SU1737330A1 |
| CN 109001296 A, 14.12.2018 | |||
| JP 07248315 A, 26.09.1995. | |||

