Изобретение относится к электротехнике и может использоваться в промышленных установках для перемещения исполнительного органа механизма по оптимальной по быстродействию диаграмме, то есть за минимально возможное время.
Аналогом заявляемого устройства является электропривод с типовыми регуляторами и идеальным валопроводом / Добробаба Ю.П., Прохоренко Д.С. Двукратно интегрирующая система автоматического регулирования положения электропривода // Изв. вузов. Пищевая технология. - 2007. - №5-6.-С.103-104/.
Аналог реализован без учета упругости валопровода электропривода, поэтому его использование не позволяет реализовать диаграммы перемещения исполнительного органа механизма, упруго соединенного с электродвигателем, то есть отработать перемещения на малые расстояния.
Наиболее близким к заявляемому микропозиционному программно-управляемому электроприводу с упругим валопроводом является микропозиционный программно-управляемый электропривод с типовыми регуляторами и упругим валопроводом / Добробаба Ю.П., Коноплин В.И., Барандыч В.Ю. Двукратно-интегрирующая система автоматического регулирования положения электропривода с типовыми регуляторами и упругим валопроводом // Изв. вузов. Пищевая технология. - 2007. - №5-6. - С.78-80 /, который принимается за прототип.
Электропривод по прототипу содержит электродвигатель постоянного тока, подключенный к выходу безынерционного преобразователя и соединенный упругим валопроводом с исполнительным органом механизма (ИОМ), командоаппарат, формирующий диаграммы перемещения ИОМ, выход командоаппарата соединен с первым входом регулятора положения электропривода, регулятор положения электропривода, выход которого соединен с входом фильтра, фильтр, выход которого соединен с первым входом регулятора частоты вращения (ЧВ) электропривода, регулятор ЧВ электропривода, выход которого соединен с первым входом регулятора тока, регулятор тока, выход которого соединен с входом безынерционного преобразователя, датчик тока, датчик ЧВ электродвигателя, датчик ЧВ ИОМ, датчик положения ИОМ, выход датчика положения ИОМ соединен с вторым входом регулятора положения электропривода, выход датчика ЧВ электродвигателя соединен с входом первого инерционно-дифференциального блока и с первым входом алгебраического сумматора, первый инерционно-дифференциальный блок, выход датчика ЧВ ИОМ соединен с вторым входом алгебраического сумматора и с вторым входом регулятора ЧВ электропривода, алгебраический сумматор, выход которого соединен с входом второго инерционно-дифференциального блока и с входом второго апериодического блока, второй апериодический блок, выход которого соединен с третьим входом регулятора ЧВ электропривода, второй инерционно-дифференциальный блок, выход которого соединен с четвертым входом регулятора ЧВ электропривода, выход первого инерционно-дифференциального блока соединен с вторым входом регулятора тока, выход датчика тока соединен с третьим входом регулятора тока.
Реализация прототипа позволяет выявить следующий недостаток: невозможность обеспечить необходимую интенсивность перемещения ИОМ, что обусловлено конструктивными особенностями прототипа.
Задача, решаемая изобретением, заключается в повышении быстродействия контуров регулирования ЧВ и положения электропривода в шестнадцать раз, что позволит увеличить интенсивность перемещения ИОМ.
Техническим результатом изобретения является синтез двукратно интегрирующей системы автоматического регулирования положения электропривода с упругим валопроводом, позволяющий достичь необходимой интенсивности перемещения ИОМ и, как следствие, увеличить производительность промышленных установок.
Указанный технический результат достигается предлагаемым микропозиционным программно-управляемым электроприводом с упругим валопроводом, содержащим электродвигатель постоянного тока, подключенный к выходу безынерционного преобразователя и соединенный упругим валопроводом с исполнительным органом механизма, командоаппарат, формирующий диаграммы перемещения исполнительного органа механизма, выход командоаппарата соединен с первым входом регулятора положения электропривода, выходной сигнал командоаппарата формирует задающее напряжение контура регулирования положения электропривода, регулятор положения электропривода, выполненный в виде пропорционального блока, выход регулятора положения электропривода соединен с входом фильтра, выходной сигнал регулятора положения электропривода формирует задающее напряжение контура регулирования частоты вращения электропривода, фильтр, выполненный в виде апериодического блока, выход фильтра соединен с первым входом регулятора частоты вращения электропривода, регулятор частоты вращения электропривода, выполненный в виде пропорционально-интегрального блока, регулятор тока, выполненный в виде пропорционально-интегрального блока, входной сигнал на первый вход регулятора тока формирует задающее напряжение контура регулирования тока, выход регулятора тока соединен с входом безынерционного преобразователя, датчик тока, датчик частоты вращения электродвигателя, датчик частоты вращения исполнительного органа механизма, датчик положения исполнительного органа механизма, выход датчика положения исполнительного органа механизма соединен с вторым входом регулятора положения электропривода, выход датчика частоты вращения электродвигателя соединен с входом первого инерционно-дифференциального блока и с первым входом первого алгебраического сумматора, первый инерционно-дифференциальный блок, выход датчика частоты вращения исполнительного органа механизма соединен с вторым входом первого алгебраического сумматора и с вторым входом регулятора частоты вращения электропривода, первый алгебраический сумматор, выход которого соединен с входом второго инерционно-дифференциального блока и с входом второго апериодического блока, второй апериодический блок, выход которого соединен с третьим входом регулятора частоты вращения электропривода, второй инерционно-дифференциальный блок, выход которого соединен с четвертым входом регулятора частоты вращения электропривода, выход первого инерционно-дифференциального блока соединен с вторым входом регулятора тока, выход датчика тока соединен с третьим входом регулятора тока, в который дополнительно введены третий инерционно-дифференциальный блок, третий апериодический блок, второй алгебраический сумматор, вход третьего инерционно-дифференциального блока соединен с выходом регулятора частоты вращения электропривода, а выход соединен с первым входом второго алгебраического сумматора, вход третьего апериодического блока соединен с выходом регулятора частоты вращения электропривода, а выход соединен с вторым входом второго алгебраического сумматора, выход второго алгебраического сумматора соединен с первым входом регулятора тока.
На чертеже представлен микропозиционный программно-управляемый электропривод с упругим валопроводом в виде двухмассовой упругой электромеханической системы: электродвигатель - первая масса; ИОМ - вторая масса; валопровод - упругость.
Микропозиционный программно-управляемый электропривод с упругим валопроводом содержит электродвигатель постоянного тока 1, подключенный к выходу безынерционного преобразователя 2 и соединенный упругим валопроводом 3 с ИОМ 4, командоаппарат 5, формирующий диаграммы перемещения ИОМ, выход командоаппарата соединен с первым входом регулятора положения электропривода 6, выходной сигнал командоаппарата формирует задающее напряжение контура регулирования положения электропривода, регулятор положения электропривода, выполненный в виде пропорционального блока, выход регулятора положения электропривода соединен с входом фильтра 7, выходной сигнал регулятора положения электропривода формирует задающее напряжение контура регулирования частоты вращения электропривода, фильтр, выполненный в виде апериодического блока, выход фильтра соединен с первым входом регулятора ЧВ электропривода 8, регулятор ЧВ электропривода, выполненный в виде пропорционально-интегрального блока, регулятор тока 9, выполненный в виде пропорционально-интегрального блока, входной сигнал на первый вход регулятора тока формирует задающее напряжение контура регулирования тока, выход регулятора тока соединен с входом безынерционного преобразователя, датчик тока 10, датчик ЧВ электродвигателя 11, датчик ЧВ вращения ИОМ 12, датчик положения ИОМ 13, выход датчика положения ИОМ соединен с вторым входом регулятора положения электропривода, выход датчика ЧВ электродвигателя соединен с входом первого инерционно-дифференциального блока 14 и с первым входом первого алгебраического сумматора 15, первый инерционно-дифференциальный блок, выход датчика ЧВ ИОМ соединен с вторым входом первого алгебраического сумматора и с вторым входом регулятора ЧВ электропривода, первый алгебраический сумматор, выход которого соединен с входом второго инерционно-дифференциального блока 16 и с входом второго апериодического блока 17, второй апериодический блок, выход которого соединен с третьим входом регулятора ЧВ электропривода, второй инерционно-дифференциальный блок, выход которого соединен с четвертым входом регулятора ЧВ электропривода, выход первого инерционно-дифференциального блока соединен с вторым входом регулятора тока, выход датчика тока соединен с третьим входом регулятора тока, третий инерционно-дифференциальный блок 18, третий апериодический блок 19, второй алгебраический сумматор 20, вход третьего инерционно-дифференциального блока соединен с выходом регулятора ЧВ электропривода, а выход соединен с первым входом второго алгебраического сумматора, вход третьего апериодического блока соединен с выходом регулятора ЧВ электропривода, а выход соединен с вторым входом второго алгебраического сумматора, выход второго алгебраического сумматора соединен с первым входом регулятора тока.
Фильтр 7, выполненный в виде первого апериодического блока, имеет следующую передаточную функцию:

где τрчв - постоянная времени регулятора ЧВ электропривода;
ρ - комплексный параметр преобразования Лапласа.
Регулятор ЧВ электропривода 8, выполненный в виде пропорционально-интегрального блока, имеет следующую передаточную функцию:
где βрчв - динамический коэффициент регулятора ЧВ электропривода.
Регулятор тока 9, выполненный в виде пропорционально-интегрального блока, имеет следующую передаточную функцию:
где βрт - динамический коэффициент регулятора тока;
τрт - постоянная времени регулятора тока.
Первый инерционно-дифференциальный блок 14 имеет следующую передаточную функцию:
где Cе - коэффициент пропорциональности между ЭДС и угловой скоростью электродвигателя;
Кип - коэффициент усиления импульсного преобразователя.
Второй инерционно-дифференциальный блок 16 имеет следующую передаточную функцию:
где Кочв - коэффициент обратной связи по ЧВ электропривода;
τчв - постоянная времени отрицательной обратной связи по разности ЧВ электродвигателя и ИОМ.
Второй апериодический блок 17 имеет следующую передаточную функцию:
где Кчв - коэффициент отрицательной обратной связи по разности ЧВ электродвигателя и ИОМ.
Третий инерционно-дифференциальный блок 18 имеет следующую передаточную функцию:

где Тμ - некомпенсированная постоянная времени.
Третий апериодический блок 19 имеет следующую передаточную функцию:
Таким образом, введение третьего инерционно-дифференциального блока, третьего апериодического блока, второго алгебраического сумматора позволило получить передаточные функции контуров регулирования ЧВ и положения по управляющему и возмущающему воздействиям заявляемого устройства в виде:




где  ;
;





ω2 - ЧВ ИОМ;
ϕ2 - угол поворота ИОМ;
Uзчв - задающее напряжение контура регулирования ЧВ электропривода;
Uзп - задающее напряжение контура регулирования положения электропривода;
Мc - момент сопротивления электропривода;
Kоп - коэффициент обратной связи по положению электропривода;
Су - жесткость валопровода;
J2 - момент инерции ИОМ.
Передаточная функция по каналу управления «задающее напряжение контура регулирования ЧВ электропривода - ЧВ ИОМ» прототипа соответствует передаточной функции по каналу управления «задающее напряжение контура регулирования ЧВ электропривода - ЧВ ИОМ» заявляемого устройства с постоянной времени Т1=16Тμ.
Передаточная функция по каналу управления «задающее напряжение контура регулирования положения электропривода - угол поворота ИОМ» прототипа соответствует передаточной функции по каналу управления «задающее напряжение контура регулирования положения электропривода - угол поворота ИОМ» заявляемого устройства с постоянной времени Т2=16 Тμ.
Следовательно, достигнуты повышение быстродействий контуров регулирования ЧВ и положения электропривода в шестнадцать раз.
Таким образом, заявляемый микропозиционный программно-управляемый электропривод с упругим валопроводом позволяет обеспечить необходимую интенсивность перемещения ИОМ и соответственно увеличить производительность промышленных установок.
Микропозиционный программно-управляемый электропривод с упругим валопроводом работает следующим образом.
Сигнал с выхода командоаппарата 5 поступает на первый вход регулятора положения электропривода 6, на второй вход которого поступает сигнал отрицательной обратной связи по положению ИОМ от блока 13. Регулятор положения электропривода формирует зависимость положения электропривода от времени. Сигнал с выхода регулятора положения электропривода, проходя через фильтр 7, поступает на первый вход регулятора ЧВ электропривода 8, на второй вход которого поступает сигнал отрицательной обратной связи по ЧВ ИОМ от блока 12, на третий и четвертый входы которого поступают сигналы от блоков 17 и 16. Блоки 16 и 17 корректируют сигнал отрицательной обратной связи по разности ЧВ электродвигателя и ИОМ, поступающий от блока 15. Регулятор ЧВ электропривода формирует зависимость ЧВ электропривода от времени. Сигнал с выхода регулятора ЧВ электропривода поступает на вход корректора контура ЧВ электропривода, выполненный в виде блоков 18, 19, 20. Сигнал с выхода корректора контура ЧВ электропривода поступает на первый вход регулятора тока 9, на второй вход которого поступает сигнал, позволяющий скомпенсировать влияние ЭДС электродвигателя, с блока 14, на третий вход которого поступает сигнал отрицательной обратной связи по току от блока 10. Регулятор тока формирует зависимость тока якорной цепи электродвигателя от времени. Сигнал с выхода регулятора тока поступает на вход безынерционного преобразователя 2. Безынерционный преобразователь формирует зависимость напряжения, приложенного к якорной цепи электродвигателя 1 от времени. Электродвигатель приводит в движение ИОМ 4 посредством упругого валопровода 3. Напряжение приложенного к якорной цепи электродвигателя определяется значением сигнала на входе безынерционного преобразователя.
Таким образом, качество управления микропозиционным программно-управляемым электроприводом с упругим валопроводом определяется передаточными функциями корректора контура ЧВ электропривода, фильтра, регулятора положения электропривода, регулятора ЧВ электропривода, регулятора тока, блоков, корректирующих сигналы обратных связей.
Изобретение относится к электротехнике и может использоваться в промышленных установках для перемещения исполнительного органа механизма по оптимальной по быстродействию диаграмме, то есть за минимально возможное время. Техническим результатом изобретения является синтез двукратно интегрирующей системы автоматического регулирования положения электропривода с упругим валопроводом, позволяющей увеличить производительность промышленных установок. Для этого в устройство, содержащее электродвигатель постоянного тока, безынерционный преобразователь, упругий валопровод, исполнительный орган механизма, командоаппарат, регулятор положения электропривода, фильтр, регулятор частоты вращения электропривода, регулятор тока, датчик тока, датчик частоты вращения электродвигателя, датчик частоты вращения исполнительного органа механизма, датчик положения исполнительного органа механизма, первый инерционно-дифференциальный блок, алгебраический сумматор, второй апериодический блок, второй инерционно-дифференциальный блок, введены третий инерционно-дифференциальный блок, третий апериодический блок, второй алгебраический сумматор. 1 ил.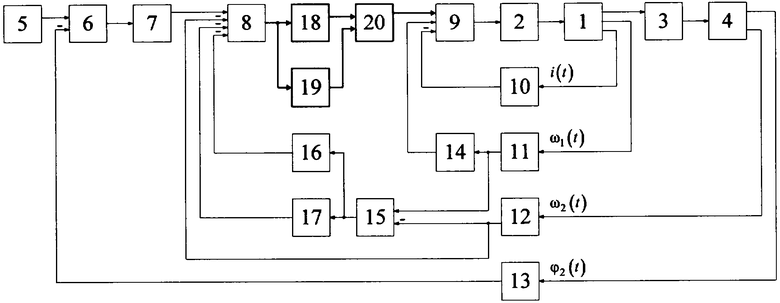
Микропозиционный программно-управляемый электропривод с упругим валопроводом, содержащий электродвигатель постоянного тока, подключенный к выходу безынерционного преобразователя и соединенный упругим валопроводом с исполнительным органом механизма, командоаппарат, формирующий диаграммы перемещения исполнительного органа механизма, выход командоаппарата соединен с первым входом регулятора положения электропривода, регулятор положения электропривода, выполненный в виде пропорционального блока, выход регулятора положения электропривода соединен с входом фильтра, фильтр, выполненный в виде апериодического блока, выход фильтра соединен с первым входом регулятора частоты вращения электропривода, регулятор частоты вращения электропривода, выполненный в виде пропорционально-интегрального блока, регулятор тока, выполненный в виде пропорционально-интегрального блока, выход регулятора тока соединен с входом безынерционного преобразователя, датчик тока, датчик частоты вращения электродвигателя, датчик частоты вращения исполнительного органа механизма, датчик положения исполнительного органа механизма, выход датчика положения исполнительного органа механизма соединен с вторым входом регулятора положения электропривода, выход датчика частоты вращения электродвигателя соединен с входом первого инерционно-дифференциального блока и с первым входом первого алгебраического сумматора, первый инерционно-дифференциальный блок, выход датчика частоты вращения исполнительного органа механизма соединен с вторым входом первого алгебраического сумматора и с вторым входом регулятора частоты вращения электропривода, первый алгебраический сумматор, выход которого соединен с входом второго инерционно-дифференциального блока и с входом второго апериодического блока, второй апериодический блок, выход которого соединен с третьим входом регулятора частоты вращения электропривода, второй инерционно-дифференциальный блок, выход которого соединен с четвертым входом регулятора частоты вращения электропривода, выход первого инерционно-дифференциального блока соединен с вторым входом регулятора тока, выход датчика тока соединен с третьим входом регулятора тока, отличающийся тем, что в электропривод введены третий инерционно-дифференциальный блок, третий апериодический блок, второй алгебраический сумматор, вход третьего инерционно-дифференциального блока соединен с выходом регулятора частоты вращения электропривода, а выход соединен с первым входом второго алгебраического сумматора, вход третьего апериодического блока соединен с выходом регулятора частоты вращения электропривода, а выход соединен с вторым входом второго алгебраического сумматора, выход второго алгебраического сумматора соединен с первым входом регулятора тока.
| ДОБРОБАБА Ю.П | |||
| и др | |||
| Двукратно-интегрирующая система автоматического регулирования положения электропривода с типовыми регуляторами и упругим валопроводом | |||
| - Пищевая технология, 2007, №5-6, с.78-80 | |||
| КАССЕТА ДЛЯ БЕСКОНЕЧНОЙ ЛЕНТЫ (ИЛИ ПРОВОЛОКИ) | 1940 |
|
SU67796A1 |
| Способ получения литых камней | 1945 |
|
SU67356A1 |
| Способ подготовки нерастворимых в воде органических красителей для приготовления лаков, масляных красок, окраски резины и т.п. | 1932 |
|
SU32650A1 |

