Изобретение относится к электротехнике и может использоваться в промышленных подъемно-транспортных установках для перемещения исполнительного органа механизма (крюковой подвески с грузом) по оптимальной по быстродействию диаграмме, то есть за минимально возможное время.
Аналогом заявляемого устройства является электропривод с типовыми регуляторами /Добробаба Ю.П., Прохоренко Д.С. Двукратно-интегрирующая система автоматического регулирования положения электропривода / Изв. вузов. Пищевая технология. - 2007. - №5-6. - С. 103-104/.
В аналоге предусмотрено измерение значения угловой скорости исполнительного органа механизма и положения исполнительного органа механизма, что в электроприводах подъемно-транспортных машин является весьма трудоемким.
Наиболее близким к заявляемой системе автоматического регулирования положения электропривода подъемно-транспортных машин является микропозиционный программно-управляемый электропривод с типовыми регуляторами и упругим валопроводом / Добробаба Ю.П., Коноплин В.И., Барандыч В.Ю. Двукратно-интегрирующая система автоматического регулирования положения электропривода с типовыми регуляторами и упругим валопроводом / Изв. вузов. Пищевая технология. - 2007. - №5-6. - С. 78-80/, который принимается за прототип.
Прототип содержит: командоаппарат, формирующий диаграммы перемещения исполнительного органа механизма, выход командоаппарата соединен с первым входом регулятора положения исполнительного органа механизма, регулятор положения исполнительного органа механизма, выполненный в виде пропорционального блока, выход регулятора положения исполнительного органа механизма соединен с входом фильтра контура частоты вращения исполнительного органа механизма, фильтр контура частоты вращения исполнительного органа механизма, выполненный в виде апериодического блока, выход фильтра контура частоты вращения исполнительного органа механизма соединен с первым входом регулятора частоты вращения исполнительного органа механизма, регулятор частоты вращения исполнительного органа механизма, выполненный в виде первого пропорционально-интегрального блока, выход регулятора частоты вращения исполнительного органа механизма соединен с первым входом регулятора тока, регулятор тока, выполненный в виде второго пропорционально-интегрального блока, выход регулятора тока соединен с входом безынерционного преобразователя, к выходу безынерционного преобразователя подключен электродвигатель постоянного тока, соединенный упругим валопроводом с исполнительным органом механизма, датчик тока, выход датчика тока соединен с третьим входом регулятора тока, датчик частоты вращения двигателя, выход датчика частоты вращения двигателя соединен с входом инерционно-дифференциального блока, выход инерционно-дифференциального блока соединен со вторым входом регулятора тока, выход датчика частоты вращения двигателя соединен с первым входом алгебраического сумматора, датчик частоты вращения исполнительного органа механизма, выход датчика частоты вращения исполнительного органа механизма соединен со вторым входом регулятора частоты вращения исполнительного органа механизма и со вторым входом алгебраического сумматора, выход алгебраического сумматора соединен с входом инерционного-пропорционально-дифференциального блока, выход инерционного-пропорционально-дифференциального блока соединен с третьим входом регулятора частоты вращения исполнительного органа механизма, датчик положения исполнительного органа механизма, выход датчика положения исполнительного органа механизма соединен со вторым входом регулятора положения исполнительного органа механизма.
При реализации прототипа выявлены следующие недостатки:
- необходимость применения дорогостоящего оборудования для измерения частоты вращения исполнительного органа механизма;
- необходимость применения дорогостоящего оборудования для измерения угла поворота исполнительного органа механизма;
- низкое быстродействие контура частоты вращения исполнительного органа механизма (передаточная функция по каналу управления «задающее напряжение контура частоты вращения - частота вращения исполнительного органа механизма» соответствует эталонной передаточной функции 5-го порядка с постоянной времени, равной 16 T µ);
- низкое быстродействие контура положения исполнительного органа механизма (передаточная функция по каналу управления «задающее напряжение контура положения - угол поворота исполнительного органа механизма» соответствует эталонной передаточной функции 6-го порядка с постоянной времени, равной 32Tµ.);
- низкая точность перемещения исполнительного органа механизма (так как низкое быстродействие контура положения исполнительного органа механизма приводит к значительной ошибке при отработке заданной диаграммы движения).
Задача, решаемая изобретением, заключается в изобретении датчиков косвенного определения значения частоты вращения исполнительного органа механизма и косвенного определения положения исполнительного органа механизма и в повышении интенсивности и точности перемещения исполнительного органа механизма.
Техническим результатом изобретения является электропривод подъемно-транспортных машин, с косвенным определением значения частоты вращения исполнительного органа механизма и косвенным определением положения исполнительного органа механизма, позволяющий достичь необходимую точность и интенсивность перемещения исполнительного органа механизма.
Указанный технический результат достигается электроприводом подъемно-транспортных машин, содержащим командоаппарат, формирующий диаграмму перемещения исполнительного органа механизма, регулятор положения исполнительного органа механизма, выход регулятора положения исполнительного органа механизма соединен с входом фильтра контура частоты вращения исполнительного органа механизма, фильтр контура частоты вращения исполнительного органа механизма, выполненный в виде первого апериодического блока, выход фильтра контура частоты вращения исполнительного органа механизма соединен с первым входом регулятора частоты вращения исполнительного органа механизма, регулятор частоты вращения исполнительного органа механизма, выполненный в виде пропорционально-интегрального блока, регулятор тока, выполненный в виде пропорционально-интегрального блока, выход регулятора тока соединен с входом безынерционного преобразователя, к выходу безынерционного преобразователя подключен электродвигатель постоянного тока, соединенный упругим валопроводом с исполнительным органом механизма, датчик тока, выход датчика тока соединен с третьим входом регулятора тока, датчик частоты вращения двигателя, выход датчика частоты вращения двигателя соединен с входом первого инерционно-дифференциального блока, выход первого инерционно-дифференциального блока соединен с вторым входом регулятора тока, инерционно-пропорционально-дифференциальный блок, выход инерционно-пропорционально-дифференциального блока соединен с вторым входом регулятора частоты вращения исполнительного органа механизма, в который дополнительно введены фильтр контура положения исполнительного органа механизма, выполненный в виде триждыинерционного блока, корректор контура частоты вращения исполнительного органа механизма, выполненный в виде триждыинерционного-пропорционально-дифференциально-дваждыдифференциально-триждыдифференциального блока, датчик положения двигателя, первый дваждыинерционный-пропорционально-дваждыдифференциальный блок, первый алгебраический сумматор, дваждыинерционный-пропорциональный блок, второй дваждыинерционный-пропорционально-дваждыдифференциальный блок, второй алгебраический сумматор, дваждыинерционный-дифференциальный блок, дваждыинерционный блок, третий алгебраический сумматор, второй апериодический блок, второй инерционно-дифференциальный блок, вход фильтра контура положения исполнительного органа механизма соединен с выходом командоап-парата, выход фильтра контура положения исполнительного органа механизма соединен с первым входом регулятора положения исполнительного органа механизма, вход корректора контура частоты вращения исполнительного органа механизма соединен с выходом регулятора частоты вращения исполнительного органа механизма, выход корректора частоты вращения исполнительного органа механизма соединен с первым входом регулятора тока, выход датчика положения двигателя соединен с входом первого дваждыинерционного-пропорционально-дваждыдифферненциального блока, выход дваждыинерционного-пропорционально-дваждыдифференциального блока соединен с первым входом первого алгебраического сумматора, вход дваждыинерционного-пропорционального блока соединен с выходом датчика тока, выход дваждыинерционного-пропорционального блока соединен со вторым входом первого алгебраического сумматора, выход первого алгебраического сумматора соединен со вторым входом регулятора положения исполнительного органа механизма, вход второго дваждыинерционного-пропорционально-дваждыдифференциального блока соединен с выходом датчика частоты вращения двигателя, выход второго дваждыинерционного-пропорционально-дваждыдифференциального блока соединен с первым входом второго алгебраического сумматора, вход дваждыинерционного-дифференциального блока соединен с выходом датчика частоты вращения двигателя, выход дваждыинерционного-дифференциального блока соединен со вторым входом второго алгебраического сумматора, выход второго алгебраического сумматора соединен с третьим входом регулятора частоты вращения исполнительного органа механизма, вход дваждыинерционного блока соединен с выходом датчика частоты вращения двигателя, выход дваждыинерционного блока соединен с первым входом третьего алгебраического сумматора, выход второго алгебраического сумматора соединен со вторым входом третьего алгебраического сумматора, выход третьего алгебраического сумматора соединен с входом инерционного-пропорционально-дифференциального блока, вход второго апериодического блока соединен с выходом третьего алгебраического сумматора, выход второго апериодического блока соединен с четвертым входом регулятора положения исполнительного органа механизма, выход второго алгебраического сумматора соединен с входом второго инерционно-дифференциального блока, выход второго инерционно-дифференциального блока соединен с третьим входом регулятора положения исполнительного органа механизма, регулятор положения исполнительного органа механизма выполнен в виде пропорционально-интегрального блока.
На чертеже представлен электропривод подъемно-транспортных машин в виде двухмассовой упругой электромеханической системы: электродвигатель - первая масса; исполнительный орган механизма - вторая масса; валопровод - упругость.
Электропривод подъемно-транспортных машин содержит командоаппарат 1, выход командоаппарата 1 соединен с входом фильтра контура положения исполнительного органа механизма 2, фильтра контура положения исполнительного органа механизма 2, выполненный в виде триждыинерционного блока, выход фильтра контура положения исполнительного органа механизма 2 соединен с первым входом регулятора положения исполнительного органа механизма 3, регулятор положения исполнительного органа механизма 3, выполненный в виде пропорционально-интегрального блока, выход регулятора положения исполнительного органа механизма 3 соединен с входом фильтра контура частоты вращения исполнительного органа механизма 4, фильтра контура частоты вращения исполнительного органа механизма 4, выполненный в виде первого апериодического блока, выход фильтра контура частоты вращения исполнительного органа механизма 4 соединен с первым входом регулятора частоты вращения исполнительного органа механизма 5, регулятор частоты вращения исполнительного органа механизма 5, выполненный в виде пропорционально-интегрального блока, выход регулятора частоты вращения исполнительного органа механизма 5 соединен с входом корректора контура частоты вращения исполнительного органа механизма 6, корректор контура частоты вращения исполнительного органа механизма 6, выполненный в виде триждыинерционного-пропорционально-дифференциально-дваждыдифференциально-триждыдифференциального блока, выход корректора контура частоты вращения исполнительного органа механизма 6 соединен с первым входом регулятора тока 7, регулятор тока 7, выполненный в виде пропорционально-интегрального блока, выход регулятора тока 7 соединен с входом безынерционного преобразователя 8, к выходу безынерционного преобразователя 8 подключен электродвигатель постоянного тока 9, соединенный упругим валопроводом 10 с исполнительным органом механизма 11, датчик положения двигателя 12, выход датчика положения двигателя 12 соединен с входом первого дваждыинерционного-пропорционально-дваждыдифференциального блока 13, выход первого дваждыинерционного-пропорционально-дваждыдифференциального блока 13 соединен с первым входом первого алгебраического сумматора 14, датчик тока 15, выход датчика тока 15 соединен с третьим входом регулятора тока 7 и входом дваждыинерционного-пропорционального блока 16, выход дваждыинерционного-пропорционального блока 16 соединен со вторым входом первого алгебраического сумматора 14, выход первого алгебраического сумматора 14 соединен со вторым входом регулятора положения исполнительного органа механизма 3, датчик частоты вращения двигателя 17, выход датчика частоты вращения двигателя 17 соединен с входом второго дваждыинерционного-пропорционально-дваждыдифференциального блока 18, выход второго дваждыинерционного-пропорционально-дваждыдифференциального блока 18 соединен с первым входом второго алгебраического сумматора 19, выход датчика тока 15 соединен с входом дваждыинерционного-дифференциального блока 20, выход дваждыинерционного-дифференциального блока 20 соединен со вторым входом второго алгебраического сумматора 19, выход второго алгебраического сумматора 19 соединен с третьим входом регулятора частоты вращения исполнительного органа механизма 5, выход датчика частоты вращения двигателя 17 соединен с входом первого инерционно-дифференциального блока 21, выход первого инерционно-дифференциального блока 21 соединен с вторым входом регулятора тока 7, выход датчика частоты вращения двигателя 17 соединен с входом дваждыинерционного блока 22, выход дваждыинерционного блока 22 соединен с первым входом третьего алгебраического сумматора 23, выход второго алгебраического сумматора 19 соединен со вторым входом третьего алгебраического сумматора 23, выход третьего алгебраического сумматора 23 соединен с входом инерционно-пропорционально-дифференциального блока 24, выход инерционно-пропорционально-дифференциального блока 24 соединен со вторым входом регулятора частоты вращения исполнительного органа механизма 5, выход третьего алгебраического блока 23 соединен с входом второго апериодического блока 25, выход второго апериодического блока 25 соединен с четвертым входом регулятора положения исполнительного органа механизма 3, выход второго алгебраического сумматора 19 соединен с входом второго инерционно-дифференциального блока 26, выход второго инерционно-дифференциального блока 26 соединен с третьим входом регулятора положения исполнительного органа механизма 3.
Фильтр контура положения исполнительного органа механизма 2, выполненный в виде триждыинерционного блока, имеет следующую передаточную функцию

где τрп - постоянная времени регулятора положения исполнительного органа механизма;
τ1, τ2 - постоянные времени фильтра контура положения исполнительного органа механизма;
р - комплексный параметр преобразования Лапласа.
Регулятор положения исполнительного органа механизма 3, выполненный в виде пропорционально-интегрального блока, имеет следующую передаточную функцию

где βрп - динамический коэффициент регулятора положения исполнительного органа механизма.
Фильтр контура частоты вращения исполнительного органа механизма 4, выполненный в виде апериодического блока, имеет следующую передаточную функцию

где τрчв - постоянная времени регулятора частоты вращения исполнительного органа механизма.
Регулятор частоты вращения исполнительного органа механизма 5, выполненный в виде пропорционально-интегрального блока, имеет следующую передаточную функцию
где βрчв - динамический коэффициент регулятора частоты вращения исполнительного органа механизма.
Корректор контура частоты вращения исполнительного органа механизма 6, выполненный в виде триждыинерционного-пропорционально-дифференциально-дваждыдифференциально-триждыдифференциального блока, имеет следующую передаточную функцию

где Tµ - некомпенсированная постоянная времени;
Т1, Т2, Т3 - постоянные времени корректора контура частоты вращения исполнительного органа механизма.
Регулятор тока 7, выполненный в виде пропорционально-интегрального блока, имеет следующую передаточную функцию

где τрт - постоянная времени регулятора тока;
βрт - динамический коэффициент регулятора тока.
Первый дваждыинерционный-пропорционально-дваждыдифференциальный блок 13 имеет следующую передаточную функцию

где J1 - момент инерции двигателя;
Cy - жесткость валопровода.
Дваждыинерционный-пропорциональный блок 16 имеет следующую передаточную функцию

где koп - коэффициент обратной связи по положению электродвигателя;
kот - коэффициент обратной связи по току;
См - коэффициент пропорциональности между током и моментом электродвигателя.
Второй дваждыинерционный-пропорционально-дваждыдифференциальный блок 18 имеет следующую передаточную функцию

Дваждыинерционный-дифференциальный блок 20 имеет следующую передаточную функцию
где kочв - коэффициент обратной связи по частоте вращения электродвигателя;
kот - коэффициент обратной связи по току.
Первый инерционно-дифференциальный блок 21 имеет следующую передаточную функцию

где Cе - коэффициент пропорциональности между напряжением и угловой скоростью электродвигателя;
βрт - динамический коэффициент регулятора скорости двигателя;
kип - коэффициент усиления импульсного преобразователя.
Дваждыинерционный блок 22 имеет следующую передаточную функцию

Инерционный-пропорционально-дифференциальный блок 24 имеет следующую передаточную функцию

где kчв - коэффициент пропорциональности инерционно-пропорционально-дифференциального блока;
τчв - постоянная времени инерционно-пропорционально-дифференциального блока.
Второй апериодический блок 25 имеет следующую передаточную функцию
где kП - коэффициент пропорциональности второго апериодического блока.
Второй инерционно-дифференциальный блок 26 имеет следующую передаточную функцию

где τП- постоянная времени второго инерционно-дифференциального блока.
Таким образом введение фильтра контура положения исполнительного органа механизма, выполненного в виде триждыинерционного блока, корректора контура частоты вращения исполнительного органа механизма, выполненного в виде триждыинерционного-пропорционально-дифференциально-дваждыдифференциально-триждыдифференциального блока, датчика положения двигателя, первого дваждыинерционного-пропорционально-дваждыдифференциального блока, первого алгебраического сумматора, дваждыинерционного-пропорционального блока, второго дваждыинерционного-пропорционально-дваждыдифференциального блока, второго алгебраического сумматора, дваждыинерционного-дифференциального блока, дваждыинерционного блока, третьего алгебраического сумматора, второго апериодического блока, второго инерционно-дифференциального блока, а так же изменение передаточной функции регулятора положения исполнительного органа механизма, позволило получить передаточные функции контуров регулирования тока, частоты вращения исполнительного органа механизма и положения исполнительного органа механизма по управляющему и возмущающему воздействиям заявляемого устройства в виде:




где 
























J2 - момент инерции исполнительного органа механизма (крюковой подвески с грузом).
Электропривод подъемно-транспортных машин работает следующим образом.
Сигнал с выхода командоаппарата 1, представляющий собой задающее напряжение системы автоматического регулирования положения электропривода подъемно-транспортных машин, поступает на вход фильтра контура положения исполнительного органа механизма 2. Сигнал с выхода фильтра контура положения, преобразованный в соответствии с передаточной функцией Wфкп(p), поступает на первый вход регулятора положения 3; на второй вход которого поступает сигнал отрицательной обратной связи по положению исполнительного органа механизма от блока 14 (измеренный косвенным способом и равный  на третий вход которого поступает сигнал отрицательной обратной связи по частоте вращения исполнительного органа механизма от блока 19 (измеренный косвенным способом и равный
на третий вход которого поступает сигнал отрицательной обратной связи по частоте вращения исполнительного органа механизма от блока 19 (измеренный косвенным способом и равный  преобразованный в соответствии с передаточной функцией W8(p) блока 26; на четвертый вход которого поступает сигнал отрицательной обратной связи с выхода третьего алгебраического сумматора 23, преобразованный в соответствии с передаточной функцией W7(p) блока 25. Регулятор положения исполнительного органа механизма 3 сумму своих входных сигналов преобразует в соответствии с передаточной функцией Wрп(p). Сигнал с выхода регулятора положения исполнительного органа механизма 3, представляющий собой задающее напряжение контура регулирования частоты вращения исполнительного органа механизма, поступает на вход фильтра контура частоты вращения исполнительного органа механизма 4. Сигнал с выхода фильтра контура частоты вращения исполнительного органа механизма 4, преобразованный в соответствии с передаточной функцией Wфкчв(p), поступает на первый вход регулятора частоты вращения исполнительного органа механизма 5; на второй вход которого поступает сигнал отрицательной обратной связи с выхода третьего алгебраического сумматора 23, преобразованный в соответствии с передаточной функцией W6(p) блока 24; на третий вход которого поступает сигнал отрицательной обратной связи по частоте вращения исполнительного органа механизма от блока 19 (измеренный косвенным способом и равный
преобразованный в соответствии с передаточной функцией W8(p) блока 26; на четвертый вход которого поступает сигнал отрицательной обратной связи с выхода третьего алгебраического сумматора 23, преобразованный в соответствии с передаточной функцией W7(p) блока 25. Регулятор положения исполнительного органа механизма 3 сумму своих входных сигналов преобразует в соответствии с передаточной функцией Wрп(p). Сигнал с выхода регулятора положения исполнительного органа механизма 3, представляющий собой задающее напряжение контура регулирования частоты вращения исполнительного органа механизма, поступает на вход фильтра контура частоты вращения исполнительного органа механизма 4. Сигнал с выхода фильтра контура частоты вращения исполнительного органа механизма 4, преобразованный в соответствии с передаточной функцией Wфкчв(p), поступает на первый вход регулятора частоты вращения исполнительного органа механизма 5; на второй вход которого поступает сигнал отрицательной обратной связи с выхода третьего алгебраического сумматора 23, преобразованный в соответствии с передаточной функцией W6(p) блока 24; на третий вход которого поступает сигнал отрицательной обратной связи по частоте вращения исполнительного органа механизма от блока 19 (измеренный косвенным способом и равный  регулятор частоты вращения исполнительного органа механизма 5 сумму своих входных сигналов преобразует в соответствии с передаточной функцией Wpчв(p).
регулятор частоты вращения исполнительного органа механизма 5 сумму своих входных сигналов преобразует в соответствии с передаточной функцией Wpчв(p).
Сигнал с выхода регулятора частоты вращения исполнительного органа механизма 5 поступает на вход корректора контура частоты вращения исполнительного органа механизма 6, который свой входной сигнал преобразует в соответствии с передаточной функцией Wккчв(p). Сигнал с выхода корректора контура частоты вращения исполнительного органа механизма 6, представляющий собой задающее напряжение контура регулирования тока, поступает на первый вход регулятора тока 7; на второй вход которого поступает сигнал с выхода датчика частоты вращения двигателя 17, преобразованный в соответствии с передаточной функцией Wку(p) блока 21; на третий вход которого поступает сигнал отрицательной обратной связи с датчика тока 15. Регулятор тока 7 сумму своих входных сигналов преобразует в соответствии с передаточной функцией Wрт(p). Сигнал с выхода регулятора тока
7 поступает на вход безынерционного преобразователя 8. Безынерционный преобразователь 8 формирует зависимость напряжения, приложенного к якорной цепи электродвигателя 9 от времени. Электродвигатель приводит в движение исполнительный орган механизм 11 посредством упругого валопровода 10. Значение напряжения, приложенного к якорной цепи электродвигателя, определяется значением сигнала на входе безынерционного преобразователя 8.
Сигнал, соответствующий положению исполнительного органа механизма (измеренный косвенным способом и равный  равен сумме сигнала, поступающего с датчика положения двигателя 12 и преобразованного в соответствии с передаточной функцией W1(p) блока 13, и сигнала, поступающего с датчика тока 15 и преобразованного в соответствии с передаточной функцией W2(p) блока 16. Сигнал, соответствующий частоте вращения исполнительного органа механизма (измеренный косвенным способом и равный
равен сумме сигнала, поступающего с датчика положения двигателя 12 и преобразованного в соответствии с передаточной функцией W1(p) блока 13, и сигнала, поступающего с датчика тока 15 и преобразованного в соответствии с передаточной функцией W2(p) блока 16. Сигнал, соответствующий частоте вращения исполнительного органа механизма (измеренный косвенным способом и равный  равен сумме сигнала, поступающего с
равен сумме сигнала, поступающего с
датчика частоты вращения двигателя 17 и преобразованного в соответствии с передаточной функцией W3(p) блока 18, и сигнала, поступающего с датчика тока 15 и преобразованного в соответствии с передаточной функцией W4(p) блока 20. Разница сигнала, поступающего с выхода датчика частоты вращения двигателя 17 и преобразованного в соответствии с передаточной функцией W5(p) блока 22, и сигнала, равного частоте вращения исполнительного органа механизма от блока 19 (измеренного косвенным способом и равного  поступает на выход третьего алгебраического сумматора 23.
поступает на выход третьего алгебраического сумматора 23.
Таким образом, качество управления электропривода подъемно-транспортных машин определяется настройкой: регуляторов положения исполнительного органа механизма, частоты вращения исполнительного органа механизма и тока; фильтров контуров положения исполнительного органа механизма и частоты вращения исполнительного органа механизма; корректора контура частоты вращения исполнительного органа механизма и корректирующих блоков.
Изобретение относится к подъемно-транспортным установкам для перемещения исполнительного органа механизма (крюковой подвески) по оптимальной по быстродействию диаграмме, то есть за минимально возможное время. Дополнительное введение в типовой микропозиционный программно-управляемый электропривод с типовым регулятором - фильтра контура положения исполнительного органа механизма, корректора контура частоты вращения исполнительного органа механизма, датчика положения двигателя, первого дваждыинерционного - пропорционально-дваждыдифференциального блока, первого алгебраического сумматора, дваждыинерционного-пропорционального блока, второго дваждыинерционно-пропорционально-дваждыдифференциального блока, второго алгебраического сумматора, дваждыинерционно-дифференциального блока, дваждыинерционного блока, а также третьего алгебраического сумматора второго апериодического блока, второго инерционно-дифференциального блока, позволило получить передаточные функции контура регулирования тока, частоты вращения и положения исполнительного органа механизма. Техническим результатом изобретения является увеличение интенсивности перемещения исполнительного органа механизма, и, как следствие, увеличение производительности подъемно-транспортных машин. 1 ил.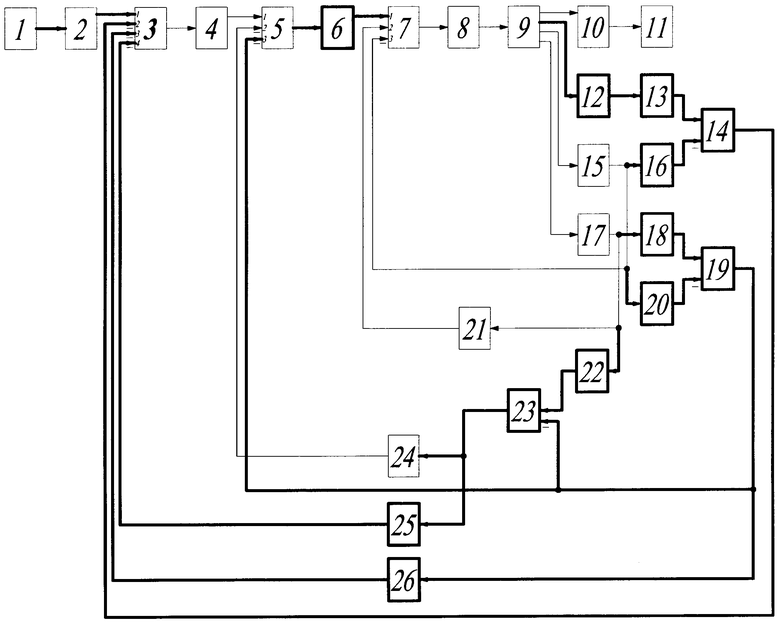
Электропривод подъемно-транспортных машин, содержащий командоаппарат, формирующий диаграмму перемещения исполнительного органа механизма, регулятор положения исполнительного органа механизма, выход регулятора положения исполнительного органа механизма соединен с входом фильтра контура частоты вращения исполнительного органа механизма, фильтр контура частоты вращения исполнительного органа механизма, выполненный в виде первого апериодического блока, выход фильтра контура частоты вращения исполнительного органа механизма соединен с первым входом регулятора частоты вращения исполнительного органа механизма, регулятор частоты вращения исполнительного органа механизма, выполненный в виде пропорционально-интегрального блока, регулятор тока, выполненный в виде пропорционально-интегрального блока, выход регулятора тока соединен с входом безинерционного преобразователя, к выходу безинерционного преобразователя подключен электродвигатель постоянного тока, соединенный упругим валопроводом с исполнительным органом механизма, датчик тока, выход датчика тока соединен с третьим входом регулятора тока, датчик частоты вращения двигателя, выход датчика частоты вращения двигателя соединен с входом первого инерционно-дифференциального блока, выход первого инерционно-дифференциального блока соединен с вторым входом регулятора тока, инерционно-пропорционально-дифференциальный блок, выход инерционно-пропорционально-дифференциального блока соединен с вторым входом регулятора частоты вращения исполнительного органа механизма, отличающийся тем, что дополнительно содержит фильтр контура положения исполнительного органа механизма, выполненный в виде триждыинерционного блока, корректор контура частоты вращения исполнительного органа механизма, выполненный в виде триждыинерционного-пропорционально-дифференциально-дваждыдифференциально-триждыдифференциального блока, датчик положения двигателя, первый дваждыинерционный-пропорционально-дваждыдифференциальный блок, первый алгебраический сумматор, дваждыинерционный-пропорциональный блок, второй дваждыинерционный-пропорционально-дваждыдифференциальный блок, второй алгебраический сумматор, дваждыинерционный-дифференциальный блок, дваждыинерционный блок, третий алгебраический сумматор, второй апериодический блок, второй инерционно-дифференциальный блок, вход фильтра контура положения исполнительного органа механизма соединен с выходом командоаппарата, выход фильтра контура положения исполнительного органа механизма соединен с первым входом регулятора положения исполнительного органа механизма, вход корректора контура частоты вращения исполнительного органа механизма соединен с выходом регулятора частоты вращения исполнительного органа механизма, выход корректора частоты вращения исполнительного органа механизма соединен с первым входом регулятора тока, выход датчика положения двигателя с входом первого дваждыинерционного-пропорционально-дваждыдифферненциального блока, выход дваждыинерционного-пропорционально-дваждыдифференциального блока соединен с первым входом первого алгебраического сумматора, вход дваждыинерционного-пропорционального блока соединен с выходом датчика тока, выход дваждыинерционного-пропорционального блока соединен со вторым входом первого алгебраического сумматора, выход первого алгебраического сумматора соединен со вторым входом регулятора положения исполнительного органа механизма, вход второго дваждыинерционного-пропорционально-дваждыдифференциального блока соединен с выходом датчика частоты вращения двигателя, выход второго дваждыинерционного-пропорционально-дваждыдифференциального блока соединен с первым входом второго алгебраического сумматора, вход дваждыинерционного-дифференциального блока соединен с выходом датчика тока, выход дваждыинерционного-дифференциального блока соединен со вторым входом второго алгебраического сумматора, выход второго алгебраического сумматора соединен с третьим входом регулятора частоты вращения исполнительного органа механизма, вход дваждыинерционного блока соединен с выходом датчика частоты вращения двигателя, выход дваждыинерционного блока соединен с первым входом третьего алгебраического сумматора, выход второго алгебраического сумматора соединен со вторым входом третьего алгебраического сумматора, выход третьего алгебраического сумматора соединен с входом инерционного-пропорционально-дифференциального блока, вход второго апериодического блока соединен с выходом третьего алгебраического сумматора, выход второго апериодического блока соединен с четвертым входом регулятора положения исполнительного органа механизма, выход второго алгебраического сумматора соединен с входом второго инерционно-дифференциального блока, выход второго инерционно-дифференциального блока соединен с третьим входом регулятора положения исполнительного органа механизма, выход второго апериодического блока соединен с четвертым входом регулятора положения исполнительного органа механизма, регулятор положения исполнительного органа механизма выполнен в виде пропорционально-интегрального блока.
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА КРАНА | 2002 |
|
RU2239277C2 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С ИДЕАЛЬНЫМ ВАЛОПРОВОДОМ | 2008 |
|
RU2370878C1 |
| Электропривод | 1987 |
|
SU1534718A1 |
| DE 10254940 A1, 17.06.2004 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ КАТОДА ДЛЯ CO -ЛАЗЕРА | 1992 |
|
RU2042223C1 |

