Изобретение относится к электротехнике и может использоваться для улучшения характеристик электроприводов астатических первого порядка, к которым предъявляются следующие требования: отсутствие статической ошибки регулирования частоты вращения (ЧВ) и ее первой производной, минимально возможная ошибка ЧВ при отработке электроприводом управляющего воздействия, предельное быстродействие контуров регулирования, минимально возможная динамическая ошибка ЧВ при ступенчатом внешнем возмущающем воздействии.
Наиболее близким к заявляемому электроприводу астатическому первого порядка является: устройство управления электродвигателем постоянного тока (патент на изобретение РФ №2158467) [1], который принимается за прототип.
Прототип содержит: электродвигатель постоянного тока, подключенный к выходу тиристорного силового блока и механически соединенный с исполнительным органом механизма, задатчик ЧВ, выход которого соединен с входом фильтра, фильтр, выход которого соединен с первым входом первого регулятора, первый регулятор, регулирующий ЧВ электропривода, выход которого соединен с первым входом второго регулятора, второй регулятор, выполненный в виде пропорционально-интегрально-двукратноинтегрирующего блока, выход которого соединен с входом системы формирования импульсов, систему формирования импульсов, подающую импульсы на открытие тиристоров, выход которой соединен с входом тиристорного силового блока, датчик напряжения, датчик тока, датчик ЧВ, первый пропорциональный блок, первый вход которого соединен с датчиком напряжения, а выход соединен со вторым входом второго регулятора, второй пропорциональный блок, вход которого соединен с выходом датчика тока, а выход соединен со вторым входом первого пропорционального блока, третий пропорциональный блок, вход которого соединен с выходом датчика ЧВ, а выход соединен с третьим входом первого пропорционального блока, первый инерционно-дифференцирующий блок, вход которого соединен с выходом датчика тока, а выход соединен с третьим входом второго регулятора, четвертый пропорциональный блок, вход которого соединен с выходом датчика ЧВ, а выход соединен со вторым входом первого регулятора.
При эксплуатации прототипа обнаружен следующий недостаток - время разгона электропривода астатического первого порядка при наличии нагрузки увеличивается, что приводит к снижению производительности технологических установок.
Задача, решаемая изобретением, заключается в устранении статической ошибки первой производной ЧВ, что приводит к уменьшению времени разгона электроприводов технологических установок.
Техническим результатом от использования изобретения является регулирование первой производной ЧВ, что позволяет достичь минимального времени разгона электропривода астатического первого порядка.
Указанный технический результат достигается тем, что в известное устройство введен второй инерционно-дифференцирующий блок, вход которого соединен с выходом датчика ЧВ, а выход соединен с четвертым входом второго регулятора, фильтр выполнен в виде апериодического блока, первый регулятор выполнен в виде инерционно-пропорционально-дифференцируещего блока, второй регулятор регулирует первую производную ЧВ.
Таким образом, введение второго инерционно-дифференцирующего блока, изменение: фильтра, первого и второго регуляторов позволило получить передаточные функции контуров регулирования первой производной ЧВ и ЧВ по управляющему и возмущающему воздействиям заявляемого устройства в виде:




где ω - ЧВ электропривода астатического первого порядка;
ω(1) - первая производная ЧВ электропривода астатического первого порядка;
UЗППЧВ - задающее напряжение контура регулирования первой производной ЧВ электропривода астатического первого порядка;
UЗЧВ - задающее напряжение контура регулирования ЧВ электропривода астатического первого порядка;
Mc - момент сопротивления электропривода астатического первого порядка;
KОППЧВ - коэффициент обратной связи по первой производной ЧВ;
КОЧВ - коэффициент обратной связи по ЧВ;
СE, СM - коэффициенты электродвигателя;
LЯ - индуктивность якорной цепи электродвигателя;
J - момент инерции электропривода;
Тμ - некомпенсированная постоянная времени;
р - комплексный параметр преобразования Лапласа.
Передаточной функции контура регулирования первой производной ЧВ электропривода по каналу управления "задающее напряжение контура регулирования первой производной ЧВ электропривода - первая производная ЧВ электропривода" соответствует максимально плоская амплитудно-частотная характеристика, т.е. данный контур отрабатывает управляющий сигнал с минимально возможной динамической ошибкой.
Передаточной функции контура регулирования ЧВ электропривода по каналу управления "задающее напряжение контура регулирования ЧВ электропривода - ЧВ электропривода" соответствует максимально плоская амплитудно-частотная характеристика, т.е. данный контур отрабатывает управляющий сигнал с минимально возможной динамической ошибкой.
Передаточная функция контура регулирования первой производной ЧВ электропривода по каналу возмущения "момент сопротивления электропривода - первая производная ЧВ электропривода" показывает, что достигнута нулевая статическая ошибка регулирования первой производной ЧВ электропривода.
Передаточная функция контура регулирования ЧВ электропривода по каналу возмущения "момент сопротивления электропривода - ЧВ электропривода" показывает, что достигнута нулевая статическая ошибка регулирования ЧВ электропривода.
Следовательно, достигнута нулевая статическая ошибка по первой производной ЧВ электропривода, что позволяет достигнуть минимального времени разгона. Кроме того, заявленный электропривод астатический первого порядка, как и прототип, обладает нулевой статической ошибкой регулирования ЧВ электропривода, минимально возможной динамической ошибкой ЧВ при отработке электроприводом управляющих воздействий, предельным быстродействием контуров регулирования, минимально возможной динамической ошибкой ЧВ при ступенчатом внешнем возмущающем воздействии.
Таким образом, заявляемый электропривод астатический первого порядка обеспечивает минимальное время разгона электропривода.
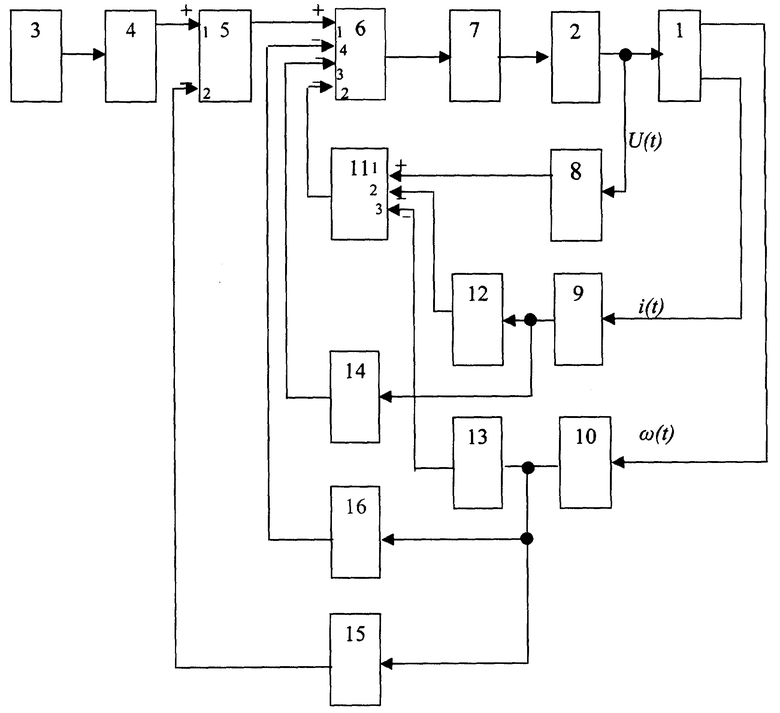
На чертеже представлена структурная схема электропривода астатического первого порядка.
Электропривод астатический первого порядка, содержит электродвигатель постоянного тока 1, подключенный к выходу тиристорного силового блока 2 и механически соединенный с исполнительным органом механизма, задатчик ЧВ 3, выход которого соединен с входом фильтра, фильтр 4, выполненный в виде апериодического блока, выход которого соединен с первым входом первого регулятора, первый регулятор 5, выполненный в виде инерционно-пропорционально-дифференцируещего блока, регулирующий ЧВ электропривода, выход которого соединен с первым входом второго регулятора, второй регулятор 6, выполненный в виде пропорционально-интегрально-двукратноинтегрирующего блока, предназначенный для регулирования первой производной ЧВ электропривода, выход которого соединен с входом системы формирования импульсов, систему формирования импульсов 7, подающую импульсы на открытие тиристоров, выход которой соединен с входом тиристорного силового блока 2, датчик напряжения 8, датчик тока 9, датчик ЧВ 10, первый пропорциональный блок 11, первый вход которого соединен с датчиком напряжения 8, а выход соединен со вторым входом второго регулятора 6, второй пропорциональный блок 12, вход которого соединен с выходом датчика тока 9, а выход соединен со вторым входом первого пропорционального блока 11, третий пропорциональный блок 13, вход которого соединен с выходом датчика ЧВ 10, а выход соединен с третьим входом первого пропорционального блока 11, первый инерционно-дифференцирующий блок 14, вход которого соединен с выходом датчика тока 9, а выход соединен с третьим входом второго регулятора 6, четвертый пропорциональный блок 15, вход которого соединен с выходом датчика ЧВ 10, а выход соединен со вторым входом первого регулятора 5, второй инерционно-дифференцирующий блок 16, вход которого соединен с выходом датчика ЧВ 10, а выход соединен с четвертым входом второго регулятора 6.
Электропривод астатический первого порядка работает следующим образом.
Сигнал с выхода задатчика ЧВ 3, проходя через фильтр 4, поступает на первый вход первого регулятора 5, на второй вход которого поступает сигнал отрицательной обратной связи по ЧВ электропривода от блока 15. Первый регулятор 5 формирует зависимость ЧВ электропривода от времени ω(t). Сигнал с выхода первого регулятора 5 поступает на первый вход второго регулятора 6, на второй вход которого поступает сигнал отрицательной обратной связи по первой производной тока якоря электродвигателя, измеренный косвенным путем, от блока 11, на третий вход которого поступает сигнал отрицательной обратной связи по первой производной тока якоря электродвигателя от блока 14, на четвертый вход которого поступает сигнал отрицательной обратной связи по первой производной ЧВ электропривода от блока 10. Блоки 12 и 13 участвуют в формировании сигнала, пропорционального первой производной тока якоря электродвигателя, измеряемого косвенным путем. Второй регулятор 6 формирует зависимость первой производной ЧВ электропривода от времени ω(1)(t). Сигнал с выхода регулятора первой производной ЧВ 6 поступает на вход системы формирования импульсов 7, которая подает импульсы на открытие тиристоров тиристорного силового блока 2. Время подачи импульсов, а следовательно, и напряжение, приложенное к якорной цепи электродвигателя определяется значением сигналов на выходе системы формирования импульсов 7.
Таким образом, качество управления электроприводом астатическим первого порядка определяется настройкой фильтра, первого и второго регуляторов, а также блоков корректирующих обратных связей.
Источники информации
1. Патент РФ 2158467, МПК 6 Н 02 Р 5/06. Устройство управления электродвигателем постоянного тока / Ю.П.Добробаба, С.В.Нестеров, А.Ю.Чумак, Д.В.Дорофеев // от 27.10.2000, БИ №30.
Изобретение относится к электротехнике и может использоваться для улучшения характеристик электроприводов астатических первого порядка. Технический результат заключается в устранении статической ошибки первой производной частоты вращения (ЧВ), что приводит к уменьшению времени разгона электроприводов технологических установок. Для этого устройство содержит электродвигатель постоянного тока, механически соединенный с исполнительным органом механизма, тиристорный силовой блок, задатчик ЧВ, фильтр, первый регулятор, регулирующий ЧВ электропривода, второй регулятор, выполненный в виде пропорционально-интегрально-двукратноинтегрирующего блока, систему формирования импульсов, подающую импульсы на открытие тиристоров, датчик напряжения, датчик тока, датчик ЧВ, первый пропорциональный блок, второй пропорциональный блок, третий пропорциональный блок, первый инерционно-дифференцирующий блок, четвертый пропорциональный блок, кроме того в привод введен второй инерционно-дифференцирующий блок, вход которого соединен с выходом датчика ЧВ, а выход соединен с четвертым входом второго регулятора, фильтр выполнен в виде апериодического блока, первый регулятор выполнен в виде инерционно-пропорционально-дифференцирующего блока и второй регулятор предназначен для регулирования первой производной ЧВ электропривода. 1 ил.
Электропривод астатический первого порядка, содержащий электродвигатель постоянного тока, подключенный к выходу тиристорного силового блока и механически соединенный с исполнительным органом механизма, задатчик частоты вращения, выход которого соединен с входом фильтра, фильтр, выход которого соединен с первым входом первого регулятора, первый регулятор, регулирующий частоту вращения электропривода, выход которого соединен с первым входом второго регулятора, второй регулятор, выполненный в виде пропорционально-интегрально-двукратно-интегрирующего блока, выход которого соединен с входом системы формирования импульсов, систему формирования импульсов, подающую импульсы на открытие тиристоров, выход которой соединен со входом тиристорного силового блока, датчик напряжения, датчик тока, датчик частоты вращения, первый пропорциональный блок, первый вход которого соединен с датчиком напряжения, а выход соединен со вторым входом второго регулятора, второй пропорциональный блок, вход которого соединен с выходом датчика тока, а выход соединен со вторым входом первого пропорционального блока, третий пропорциональный блок, вход которого соединен с выходом датчика частоты вращения, а выход соединен с третьим входом первого пропорционального блока, первый инерционно-дифференцирующий блок, вход которого соединен с выходом датчика тока, а выход соединен с третьим входом второго регулятора, четвертый пропорциональный блок, вход которого соединен с выходом датчика частоты вращения, а выход соединен со вторым входом первого регулятора, отличающийся тем, что в привод введен второй инерционно-дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения, а выход соединен с четвертым входом второго регулятора, фильтр выполнен в виде апериодического блока, первый регулятор выполнен в виде инерционно-пропорционально-дифференцирующего блока и второй регулятор предназначен для регулирования первой производной частоты вращения электропривода.
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158467C2 |
| RU 2066087 C1, 27.08.1996 | |||
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
| Способ сжигания жидкого топлива и горелочное устройство | 1986 |
|
SU1386797A1 |

