Предлагаемые способ и система относятся к автоматике и вычислительной технике и могут быть использованы при построении систем автоматизированного управления складами, а именно для облегчения поиска грузов, в системах поиска шахтеров в шахтах после аварии, отслеживания перемещений персонала по территории охраняемых и важных объектов.
Известна система для определения координат объектов, содержащая антенну и приемник сигналов спутниковой навигации, связанные с бортовой вычислительной машиной (Свидетельство на полезную модель №30.045 U1. Система передачи информации по радиоканалу. Пайгин В.П., Киреев Ю.П. и др., Н04В 3/00, 2002).
Недостаток известной системы аналога заключается в невозможности определения координат подвижного объекта при нахождении его в закрытом помещении: на складе, в ангаре, в туннеле. Это связано с тем фактом, что сигналы спутниковой навигации, передаваемые спутниками системы GPS (Global Positioning System), не принимаются спутниковой антенной из-за экранирующих свойств стен, крыш, зданий, толщи Земли.
Известен способ идентификации объекта, при котором идентификаторы находятся у людей (подвижные объекты), один считыватель встраивается в замок (пункт считывания), считыватель содержит контроллер локальной сети, связанный с центральной ЭВМ (Малашевич Б. Бесконтактная идентификация. - Ж. «CHIP NEWS» - 2000, №8 (51), с.25-30).
В указанной статье описан принцип действия бесконтактных радиочастотных идентификаторов.
Электронные метки (идентификаторы) выполняются на основе безкорпусных интегральных микросхем, изготовленных по КМОП-технологии. Такая микросхема имеет постоянное запоминающее устройство (ЗУ) или перепрограммируемое ЗУ, в которое записывается идентификационный номер объекта и другие его характеристики. Микросхемы вместе с приемопередающей антенной могут устанавливаться в различных корпусах в виде пластиковой карты, брелока, диска, метки-таблетки. Корпусное исполнение определяется назначением радиочастотного идентификатора.
Пластиковые карты производят для изготовления пропусков в системах санкционированного допуска, меток для наклейки на товары в супермаркетах и на складах, брелоков для идентификации ключей или других ценных предметов, жетонов для скрытной установки в изделиях, меток-таблеток для скрытной установки в изделиях. Жетоны и метки могут быть установлены скрытно в бетоне или закрашены в изделии, что затрудняет действия по снятию их для обезличивания изделия.
Недостаток указанного способа определения координат является то, что определяется координата расположения считывателя. Например, при проходе на охраняемую территорию сотрудник помещает свой пропуск в считыватель, считыватель считывает код пропуска, отправляет его по локальной сети в центральную ЭВМ, где происходит проверка этого кода па ограничение доступа в данное помещение. ЭВМ отправляет код разрешения открывания замка двери. При этом ЭВМ записывает в базу данных время, код сотрудника, номер помещения, в котором находится этот сотрудник. Другими словами, координаты сотрудника (как объекта) определяются с точностью до размеров комнаты, предприятия. Другой недостаток заключается в необходимости человеку осуществлять взаимодействие радиочастотного идентификатора со считывателем путем ручного ввода пропуска (карточки) со встроенным радиочастотным идентификатором в считыватель.
Известен способ идентификации объекта, при котором радиочастотные идентификаторы устанавливаются на бортах подвижных объектов (вагонов или контейнеров), считыватели устанавливаются на границе железнодорожной станции рядом с железнодорожными путями (пункт считывания) и содержат контроллер локальной сети, связанный с центральной ЭВМ (Система автоматической идентификации контейнеров и транспортных средств «Пальма». - Рекламный проспект ЦНИРТИ, г.Москва).
Достоинство данного способа заключается в дистанционном считывании информации считывателем из радиочастотного идентификатора. Расстояние считывания составляет 13 м при наличии источника питания в составе радиочастотного идентификатора и 5 м без источника питания. Недостаток данного способа заключается в том, что он направлен на идентификацию (определение номера и принадлежности) железнодорожных вагонов, контейнеров, автомобильного транспорта и определяет пункт идентификации без определения координат установки считывателя, т.е. точность координат объекта (вагона) равна размеру самой железнодорожной станции и всей ее площади под путями (несколько км2).
Известны также способы определения координат подвижного объекта (патенты РФ №№2.013.785, 2.284.542; патент США №4.916.455; патент Франции №2.630.565; патент WO №98/53.431; Бурлаков В. Радиочастотная идентификация. Электронные компоненты. 2005, №5, с.55-60 и другие).
Из известных способов и систем наиболее близкими к предлагаемым являются «Способ определения координат подвижного объекта в закрытых помещениях и система для его реализации» (патент №2.284.542, G01S 1/00, 2004), которые и выбраны в качестве прототипов.
Известные технические решения обеспечивают повышение точности определения координат подвижного объекта до величины размера ячейки сетки с постоянным шагом, нанесенной на план помещения.
Технической задачей изобретения является повышение достоверности и надежности мониторинга подвижных объектов в закрытых помещениях путем использования сложных сигналов с фазовой манипуляцией и надежных радиочастотных идентификаторов на поверхностных акустических волнах.
Поставленная задача решается тем, что способ определения координат подвижного объекта в закрытых помещениях с использованием электронных идентификаторов и считывателей, согласно которому в соответствии с ближайшим аналогом считыватель закрепляют на подвижном объекте, а электронные идентификаторы закрепляют на элементах конструкции помещения, при приближении к электронному идентификатору подвижного объекта его считывателем считывают код электронного идентификатора и вместе с кодом подвижного объекта передают через радиомодем на радиомодем ЭВМ, при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминают в ЭВМ, в которой определяют координаты подвижного объекта и отображают его положение на мониторе совместно с планом помещения, отличается от ближайшего аналога тем, что в качестве электронного идентификатора используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при приближении к электронному идентификатору подвижного объекта его считывателем облучают электронный идентификатор гармоническим колебанием несущей частоты ω1, принимают его на электронном идентификаторе, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают считывателем подвижного объекта, усиливают по амплитуде, осуществляют синхронное детектирование на частоте ω1, выделяют низкочастотное напряжение, соответствующее коду электронного идентификатора, задерживают его на время, равное длительности кода электронного идентификатора, суммируют с кодом подвижного объекта, перемножают гармоническое колебание несущей частоты ω1 само на себя, выделяют гармоническое колебание несущей частоты ω2=2ω1, манипулируют его по фазе суммарным кодом, усиливают по мощности сформированный сложный сигнал с фазовой манипуляцией, излучают в эфир, принимают радиомодемом ЭВМ, делят по фазе на два, выделяют гармоническое колебание несущей частоты ω1, умножают его по фазе на два, выделяют гармоническое колебание несущей частоты ω2, сдвигают его по фазе на 90° и используют для синхронного детектирования сложного сигнала с фазовой манипуляцией на частоте ω2.
Поставленная задача решается тем, что система для определения координат положения подвижного объекта в закрытых помещениях, содержащая в соответствии с ближайшим аналогом электронные идентификаторы, размещенные на элементах конструкции помещения, считыватель, закрепленный на подвижном объекте, передающий радиомодем, связанный со считывателем, и приемный радиомодем, подключенный к ЭВМ, при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминаются в ЭВМ, в которой определяются координаты подвижного объекта и отображается его положение на мониторе совместно с планом помещения, отличается от ближайшего аналога тем, что считыватель выполнен в виде последовательно включенных задающего генератора, циркулятора, вход-выход которого связан с приемопередающей антенной, усилителя высокой частоты и фазового детектора, второй вход которого соединен с выходом задающего генератора, передающий радиомодем выполнен в виде последовательно подключенных к выходу фазового детектора линии задержки, сумматора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, фазового манипулятора и усилителя мощности, выход которого соединен с вторым входом циркулятора, последовательно подключенных к выходу задающего генератора перемножителя, второй вход которого соединен с выходом задающего генератора, и узкополосного фильтра, выход которого соединен с вторым входом фазового манипулятора, приемный радиомодем выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, делителя фазы на два первого узкополосного фильтра, удвоителя фазы, второго узкополосного фильтра, фазовращателя на 90° и фазового детектора, второй вход которого соединен с выходом усилителя высокой частоты, а выход подключен к ЭВМ, электронный идентификатор выполнен в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной.
Структурная схема системы, реализующей предлагаемый способ, представлена на фиг.1. Функциональная схема радиочастотного идентификатора изображена на фиг.2. Структурная схема считывателя и передающего радиомодема представлена на фиг.3. Структурная схема приемного радиомодема представлена на фиг.4. Временные диаграммы, поясняющие работу системы, показаны на фиг.5.
Система для определения координат подвижного объекта в закрытых помещениях содержит радиочастотные идентификаторы 1, считыватель 2, передающий радиомодем 3 с приемопередающей антенной 8, приемный модем 5 с приемной антенной 23, подключенный к ЭВМ 4.
Радиочастотный идентификатор выполнен в виде пьезокристалла 18 с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной 19, и набором отражателей 22. Встречно-штыревой преобразователь поверхностных акустических волн (ПАВ) содержит две гребенчатые системы электродов 20, шины 21, которые соединяют электроды каждой из гребенок между собой. Шины 21 в свою очередь связаны с микрополосковой антенной 19.
Считыватель 2 выполнен в виде последовательно включенных задающего генератора 6, циркулятора 7, вход-выход которого связан с приемопередающей антенной 8, усилителя 9 высокой частоты и фазового детектора 10, второй вход которого соединен с выходом задающего генератора 6.
Передающий радиомодем 3 выполнен в виде последовательно подключенных к выходу фазового детектора 10 линии 11 задержки, сумматора 13, второй вход которого соединен с выходом генератора 12 псевдослучайной последовательности (ПСП), фазового манипулятора 16 и усилителя 17 мощности, выход которого соединен с вторым входом циркулятора 7, последовательно подключенных к выходу задающего генератора 6 перемножителя 14, второй вход которого соединен с выходом задающего генератора 6, и узкополосного фильтра 15, выход которого соединен с вторым входом фазового манипулятора 16.
Приемный радиомодем 5 выполнен в виде последовательно подключенных к выходу приемной антенны 23 усилителя 24 высокой частоты, делителя 25 фазы на два, первого узкополосного фильтра 26, удвоителя 27 фазы второго узкополосного фильтра 28, фазовращателя 29 на 90° и фазового детектора 30, второй вход которого соединен с выходом усилителя 24 высокой частоты, а выход подключен к ЭВМ 4.
Способ определения координат подвижного объекта в закрытых помещениях реализуется следующим образом.
Составляется (или берется готовый) план здания, склада, шахты. Замеряются расстояния по этому плану между радиочастотными идентификаторами 1, которые должны служить отметками координат. Например, для склада (ангара), в котором не имеется внутренних перегородок, на план можно нанести сетку с постоянным шагом между ячейками. В системе координат этого плана определяют координаты этих ячеек. В радиочастотные идентификаторы записывают координаты ячеек, идентификаторы соответственно маркируются путем выбора внутренней структуры встречно-штыревого преобразователей. На полу делается соответствующая разметка и высверливаются отверстия, в которые закладываются соответствующие идентификаторы, отверстия бетонируются. Можно под потолком натянуть проволоку, на которую закрепить идентификаторы 1. В шахте идентификаторы 1 можно закрепить с соответствующим шагом на потолке штрека.
На фиг.1 представлена система, реализующая предлагаемый способ, в которой радиочастотные идентификаторы 1 содержат коды их координат и закреплены на строительных конструкциях. В память считывателя 2 записывают код подвижного объекта (оператора склада, шахтера, важного груза, погрузчика) и закрепляют его соответственно на поясе человека, на погрузчике, на грузе.
Задающим генератором 6 считывателя 2 формируется высокочастотное колебание (фиг.5, а):
U1(t)=υ1·Cos(ω1t+φ1), 0≤t≤T1,
где υ1, ω1, φ1, T1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания,
которое через циркулятор 7 поступает в антенну 8, излучается ею в эфир и облучает ближайший радиочастотный идентификатор 1. Высокочастотное гармоническое колебание на частоте ω1 улавливается микрополосковой антенной 19, настроенной на частоту ω1, преобразуется встречно-штыревым преобразователем в акустическую волну, которая распространяется по поверхности пьезокристалла 18, отражается от отражателей 22 и опять преобразуется в сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, в):
U2(t)=υ2·Cos(ω1t+φк1(t)+φ1), 0≤t≤T1,
где φk1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг.5, б), отображающим координаты идентификатора, причем φk1(t)=const при k·τэ<t<(k+1)·τэ и может изменяться скачком при t=k·τэ, т.е. на границах между элементарными посылками (k=1, 2, …, N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью T1 (T1=N·τэ).
При этом внутренняя структура сформированного сложного ФМн-сигнала определяется топологией встречно-штыревого преобразователя, имеет индивидуальный характер и содержит информацию о местоположении идентификатора в соответствующем сооружении.
Сформированный сложный ФМн-сигнал U2(t) излучается микрополосковой антенной 19 в эфир, улавливается приемной антенной 8, а через циркулятор 7 и усилитель 9 высокой частоты поступает на информационный вход фазового детектора 10. На опорный вход последнего в качестве опорного напряжения подается высокочастотное колебание U1(t) (фиг.5, а) с выхода задающего генератора 6. На выходе фазового детектора 10 образуется низкочастотное напряжение (фиг.5, г):
Uн1(t)=υн1·Cosφк1(t) 0≤t≤T1,
где υн1=1/2υ1·υ2,
пропорциональное модулирующему коду M1(t) (фиг.5, б).
Это напряжение поступает на линию 11 задержки, где задерживается на время τЗ, равное длительности τ1 модулирующего кода M1(t), и поступает на первый вход сумматора 13. На второй вход последнего подается код подвижного объекта (оператора склада, погрузчика, шахтера) с выхода генератора 12 псевдослучайной последовательности (ПСП) длительностью τ2. На выходе сумматора 13 образуется суммарный модулирующий код M2(t) (фиг.5, е), состоящий из кода координат идентификатора и кода подвижного объекта, длительностью τ=τ1+τ2. Модулирующий код M2(t) поступает на первый вход фазового манипулятора 16.
Высокочастотное колебание U1(t) (фиг.5, а) одновременно поступает на два входа перемножителя 14, на выходе которого образуется напряжение (фиг.5, д):
U3(t)=υ3·Cos(ω2t+φ2), 0≤t≤T1,
где υ3=1/2υ1 2;
ω2=2ω1; φ2=2φ1.
Это напряжение подается на второй вход фазового манипулятора 16, на выходе которого формируется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, ж):
U4(t)=υ4·Cos[ω2t+φк2(t)+φ2], 0≤t≤T1,
который после усиления в усилителе 17 мощности через циркулятор 7 поступает в приемопередающую антенну 8, излучается ею в эфир, улавливается приемной антенной 23 и через усилитель 24 высокой частоты поступает на вход делителя 26 фазы на два.
Следует отметить, что манипулируемую составляющую фазы φк2(t) в напряжении U4(t) можно представить в следующем виде:
φк2(t)=Δφ·в(t),
где Δφ=90°,
в(t) - функция, определяющая закон изменения фазы.
Для упрощения будем полагать, что функция в(t) периодическая с периодом Т, равным удвоенному значению длительности τэ элементарных посылок (Т=2τэ), т.е.:
Разложение функции в(t) в ряд Фурье имеет следующий вид:
На выходе делителя 25 фазы на два будет иметь место следующее напряжение:
 .
.
При бинарной фазовой манипуляции, т.е. при φк2(t)={0, π}, Δφ=90°, ФМн-сигнал U4(t) не содержит в своем спектре колебания несущей частоты ω2, так как Cos90°=0.
На выходе делителя 25 фазы на два в спектре полученного напряжения U5(t) появляется составляющая несущей частоты ω2, так как Cos(Δφ/2)-Cos45°=0,707 и напряжение будет иметь следующий вид (фиг.5, з):
где υ6=0,707·υ5.
Это напряжение выделяется узкополосным фильтром 26 и поступает на вход удвоителя 27 фазы, на выходе которого образуется гармоническое колебание:
U7(t)=υ7·Sin(ω2t+φ2), 0≤t≤T1,
где υ7=1/2·υ5 2,
которое выделяется узкополосным фильтром 28 и поступает на вход фазовращателя 29 на 90°. На выходе последнего образуется гармоническое колебание (фиг.5, и):
 ,
,
которое используется в качестве опорного напряжения и подается на опорный вход фазового детектора 30, на информационный вход которого подается ФМн-сигнал U4(t) (фиг.5, ж) с выхода усилителя 24 высокой частоты.
В результате синхронного детектирования на выходе фазового детектора 30 образуется низкочастотное напряжение (фиг.5, к):
Uн2(t)=υн2·Cosφк2(t), 0≤t≤Т1,
где υн2=1/2υ4·υ7,
пропорциональное суммарному модулирующему коду M2(t) (фиг.5, е).
Информация, содержащаяся в модулирующем коде M2(t), обрабатывается, запоминается и отображается на мониторе совместно с планом здания (сооружения). Таким образом отслеживается положение подвижного объекта в закрытом помещении непрерывно во времени.
Такая информация может иметь особую важность для контроля и учета работы персонала складов и арсеналов с секретным и особо опасным оборудованием, так как положение такого оборудования в помещении будет контролироваться постоянно.
Таким образом, предлагаемые способ и система по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают повышение достоверности и надежности постоянного мониторинга подвижных объектов в закрытых помещениях. Это достигается использованием сложных сигналов с фазовой манипуляцией и надежных радиочастотных идентификаторов на поверхностных акустических волнах.
Радиочастотные идентификаторы выполняются в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей.
Принцип работы встречно-штыревых преобразователей основан на том, что переменные в пространстве и времени электрические поля, создаваемые в пьезоэлектрическом кристалле системой электродов, вызывают из-за пьезоэффекта упругие деформации, которые распространяются в кристалле в виде поверхностных акустических волн (ПАВ).
Поверхностные акустические волны - это волны, распространяющиеся вдоль поверхности твердых тел в относительно тонком поверхностном слое. Скорость распространения ПАВ в кристаллах примерно на пять порядков меньше скорости распространения электромагнитных колебаний. Это значит, что на сантиметре кристалла можно разместить информацию, которая заполнит кабель длиной в километр. Высокая информационная емкость приборов на поверхностных акустических волнах и отсутствие источников питания обеспечивают высокую надежность работы радиочастотных идентификаторов, которые предоставляют возможность дистанционного считывания несущей ими информации неограниченное число раз в течение длительного времени.
Сложные сигналы с фазовой манипуляцией открывают большие возможности в технике передачи сообщений. Они позволяют применять структурную селекцию. Это значит, что появляется возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
С точки зрения обнаружения ФМн-сигналы обладают энергетической и структурной скрытностью.
Энергетическая скрытность сложных ФМн-сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскирован шумами и помехами. Причем энергия ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемного устройства.
Для развязки радиочастотных идентификаторов и радиомодемов выбраны разные частоты ω1 и ω2=2ω1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369418C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373082C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2388629C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2360809C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2010 |
|
RU2429544C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2378138C1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2008 |
|
RU2397548C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ДВУХПРОВОДНЫХ СЕТЯХ С ЗАЩИТОЙ ОТ ХИЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2439588C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В ПОДЗЕМНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381467C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2009 |
|
RU2411532C1 |
Предлагаемые способ и система могут быть использованы для облегчения поиска грузов, в системах поиска шахтеров в шахтах после аварии, отслеживания перемещений персонала по территории охраняемых и важных объектов. Достигаемым техническим результатом изобретения является повышение достоверности и надежности мониторинга подвижных объектов в закрытых помещениях путем использования сложных сигналов с фазовой манипуляцией и надежных радиочастотных идентификаторов на поверхностных акустических волнах. Система, реализующая предлагаемый способ, содержит радиочастотные идентификаторы, считыватель, передающий радиомодем с антенной, электронно-вычислительную машину (ЭВМ) и приемный радиомодем с антенной. Считыватель содержит задающий генератор, циркулятор, усилитель высокой частоты и фазовый детектор. Передающий радиомодем содержит линию задержки, генератор псевдослучайной последовательности, фазовый манипулятор, сумматор, перемножитель, узкополосный фильтр и усилитель мощности. Радиочастотный идентификатор содержит пьезокристалл, микрополосковую антенну, шины, электроды. 2 н.п. ф-лы, 5 ил.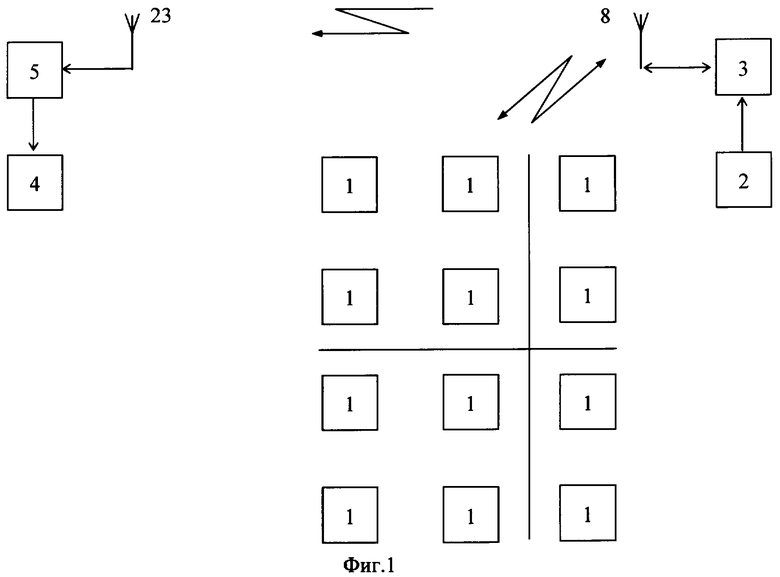
1. Способ определения координат положения подвижного объекта в закрытых помещениях с использованием электронных идентификаторов и считывателей, согласно которому считыватель закрепляют на подвижном объекте, а электронные идентификаторы закрепляют на элементах конструкции помещения, при приближении к электронному идентификатору подвижного объекта его считывателем считывают код электронного идентификатора и вместе с кодом подвижного объекта передают через радиомодем на радиомодем электронно-вычислительной машины (ЭВМ), при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминают в ЭВМ, в которой определяют координаты подвижного объекта и отображают его положение на мониторе совместно с планом помещения, отличающийся тем, что в качестве электронного идентификатора используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при приближении к электронному идентификатору подвижного объекта его считывателем облучают электронный идентификатор гармоническим колебанием несущей частоты ω1, принимают его на электронном идентификаторе, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают считывателем подвижного объекта, усиливают по амплитуде, осуществляют синхронное детектирование на частоте ω1, выделяют низкочастотное напряжение, соответствующее коду электронного идентификатора, задерживают его на время, равное длительности кода электронного идентификатора, суммируют с кодом подвижного объекта, перемножают гармоническое колебание несущей частоты само на себя, выделяют гармоническое колебание несущей частоты ω2=2ω1, манипулируют его по фазе суммарным кодом, усиливают по мощности, сформированный сложный сигнал с фазовой манипуляцией излучают в эфир, принимают радиомодемом ЭВМ, делят по фазе на два, выделяют гармоническое колебание несущей частоты ω1, умножают его по фазе на два, выделяют гармоническое колебание несущей частоты ω2, сдвигают его по фазе на 90° и используют для синхронного детектирования сложного сигнала с фазовой манипуляцией.
2. Система для определения координат положения подвижного объекта в закрытых помещениях, содержащая электронные идентификаторы, размещенные на элементах конструкции помещения, считыватель, закрепленный на подвижном объекте, передающий радиомодем, связанный со считывателем, и приемный радиомодем, подключенный к электронно-вычислительной машине (ЭВМ), при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения, коды электронных идентификаторов и коды координат их положения запоминаются в ЭВМ, в которой определяются координаты подвижного объекта и отображается его положение на мониторе совместно с планом помещения, отличающаяся тем, что считыватель выполнен в виде последовательно включенных задающего генератора, циркулятора, вход-выход которого связан с приемопередающей антенной, усилителя высокой частоты и фазового детектора, второй вход которого соединен с выходом задающего генератора, передающий радиомодем выполнен в виде последовательно подключенных к выходу фазового детектора линии задержки, сумматора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, фазового манипулятора и усилителя мощности, выход которого соединен с вторым входом циркулятора, последовательно подключенных к выходу задающего генератора перемножителя, второй вход которого соединен с выходом задающего генератора, и узкополосного фильтра, выход которого соединен с вторым входом фазового манипулятора, приемный радиомодем выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, делителя фазы на два, первого узкополосного фильтра, удвоителя фазы, второго узкополосного фильтра, фазовращателя на 90° и фазового детектора, второй вход которого соединен с выходом усилителя высокой частоты, а выход подключен к ЭВМ, электронный идентификатор выполнен в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ | 2004 |
|
RU2284542C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2248235C1 |
| ВЕРТИКАЛЬНАЯ РОТОРНАЯ УСТАНОВКА С РАЗГРУЖАЕМЫМИ ОПОРНЫМИ УЗЛАМИ | 2005 |
|
RU2286486C1 |
| US 4916455, 10.04.1990 | |||
| US 6044256 А, 28.03.2000 | |||
| ПЕРИОДИЧЕСКИЙ СПОСОБ ПРОИЗВОДСТВА АНОДНОЙ МАССЫ | 2004 |
|
RU2256730C1 |
| US 7151447 В1, 19.12.2006. | |||

