Область техники
Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении систем автоматизированного управления складами, а именно для облегчения поиска грузов, в системах поиска шахтеров в шахтах после аварий, отслеживания перемещений персонала по территории охраняемых и важных объектов.
Уровень техники
Известна система для определения координат объектов, содержащая антенну и приемник сигналов спутниковой навигации, связанные с бортовой вычислительной машиной (Система передачи информации по радиоканалу, свидетельство на полезную модель RU №30045 U1, заявка №2002128223/20 от 23.10.02 г., МКИ 7 Н 04 В 3/00, G 06 F 13/00, авторы: В.П.Пайгин, Ю.П.Киреев и др.).
Недостаток известной системы-аналога заключается в невозможности определения координат подвижного объекта при нахождении его в закрытом помещении: на складе, в ангаре, в туннеле. Это связано с тем фактом, что сигналы спутниковой навигации, передаваемые спутниками системы GPS (Global Positioning System), не принимаются спутниковой антенной из-за экранирующих свойств стен, крыш зданий, толщи земли.
Известен способ идентификации объекта, при котором идентификаторы находятся у людей (подвижные объекты), один считыватель встраивается в замок (пункт считывания), считыватель содержит контроллер локальной сети, связанный с центральной ЭВМ (Малошевич Б. Бесконтактная идентификация. - Ж. "CHIP NEWS". - 2000. №8 (51), с.25-30).
В указанной статье описан принцип действия бесконтактных радиочастотных идентификаторов.
Электронные метки (идентификаторы) выполняются на основе бескорпусных интегральных микросхем, изготовленных по КМОП - технологии. Такая микросхема имеет постоянное запоминающее устройство (ЗУ) или перепрограммируемое ЗУ, в которое записывается идентификационный номер объекта и другие его характеристики. Радиочастотные идентификаторы производит ОАО "Ангстрем" г.Зеленоград. Микросхемы вместе с приемно-передающей антенной могут устанавливаться в различных корпусах в виде пластиковой карты, брелока, диска, метки-таблетки. Корпусное исполнение определяется назначением радиочастотного идентификатора.
Пластиковые карты производят для изготовления пропусков в системах санкционированного допуска, меток для наклейки на товары в супермаркетах и на складах, брелоков для идентификации ключей или других ценных предметов, жетонов для скрытной установки в изделиях, меток-таблеток для скрытной установки в изделиях. Жетоны и метки могут быть установлены скрытно в бетоне или закрашены в изделии, что затрудняет действия по снятию их для обезличивания изделия.
Для дистанционного считывания радиочастотных идентификаторов используют считыватели радиочастотных идентификаторов. Считыватель выполняет следующие функции:
- излучает немодулированный сигнал на заданной частоте (125 кГц или 13,56 мГц);
- тем самым снабжает интегральные микросхемы (ИМС) идентификатора энергией электрического питания;
- тем самым стимулирует ИМС к формированию ответной посылки, записанного в ней идентифицирующего кода в виде модулированного по амплитуде радиосигнала;
- принимает радиосигнал, запоминает идентифицирующий код и имеет возможность переписать этот код в контроллер или электронную вычислительную машину (ЭВМ) системы идентификации;
- оповещает оператора через световую индикацию и звуковой сигнал о записи ответной посылки.
Считыватели через кабель подключаются к переносным и стационарным терминалам.
Недостатком указанного способа определения координат является то, что определяется координата расположения считывателя. Например, при проходе на охраняемую территорию, сотрудник помещает свой пропуск в считыватель, считыватель считывает код пропуска, отправляет его по локальной сети в центральную ЭВМ, где происходит проверка этого кода на ограничение доступа в данное помещение. ЭВМ отправляет код разрешения открывания замка двери. При этом ЭВМ записывает в базу данных время, код сотрудника, номер помещения, в котором находится этот сотрудник. Другими словами координаты сотрудника (как объекта) определяются с точностью до размеров комнаты, предприятия. Другой недостаток заключается в необходимости человеку осуществлять взаимодействие радиочастотного идентификатора со считывателем путем ручного ввода пропуска (карточки) со встроенным радиочастотным идентификатором в считыватель.
Наиболее близким по технической сущности к заявляемому предлагаемому изобретению (прототипом) является способ идентификации объекта, при котором радиочастотные идентификаторы устанавливаются на бортах подвижных объектов (вагонов или контейнеров), считыватель устанавливается на границе железнодорожной станции рядом с железнодорожными путями (пункт считывания) и содержит контроллер локальной сети, связанный с центральной ЭВМ (Система автоматической идентификации контейнеров и транспортных средств "ПАЛЬМА". - Рекламный проспект ЦНИРТИ, г.Москва).
Достоинство известного способа заключается в дистанционном считывании информации считывателем из радиочастотного идентификатора. Расстояние считывания составляет 13 м при наличии источника питания в составе радиочастотного идентификатора и 5 м без источника питания. Недостаток известного способа-прототипа заключается в том, что он направлен на идентификацию (определение номера и принадлежности) железнодорожных вагонов, контейнеров, автомобильного транспорта и определяет пункт идентификации без определения координат установки считывателя, т.е. точность координат объекта (вагона) равна размеру самой железнодорожной станции и всей ее площади под путями (несколько км2).
Сущность изобретения
Предлагаемый способ определения координат положения подвижного объекта в закрытых помещениях, позволяет определять положение подвижного объекта с точностью равной величине отличия координат двух соседних считывателей или идентификаторов, установленных на элементах строительных конструкций закрытого помещения (до долей метра).
В известном способе, идентификаторы закрепляют на подвижных объектах, один считыватель закрепляют на элементах конструкции пункта контроля, считыватель соединяют с контроллером локальной сети, который соединяют с центральной ЭВМ.
Целью данного изобретения является решение новой научно-технической задачи, а именно, определения координат положения подвижного объекта в закрытых помещениях при помощи радиочастотных идентификаторов и повышение точности определения этих координат до величины расстояния между двумя соседними неподвижно закрепленными считывателями или радиочастотными идентификаторами. Для этого в помещениях (шахтах, складах), на элементах строительных конструкций закрепляют необходимое количество считывателей или радиочастотных идентификаторов, в которые заносят коды координат положения этих считывателей или радиочастотных идентификаторов (в местной системе координат).
Способ определения координат положения подвижного объекта в закрытых помещениях может быть реализован в варианте 1 так, что в помещениях (шахтах, складах), на элементах строительных конструкций закрепляют необходимое количество считывателей, в которые заносят коды координат положения этих считывателей (в местной системе координат), каждый считыватель соединяют с контроллером локальной сети, который соединяют с центральной ЭВМ, в процессе перемещения подвижного объекта считыватели взаимодействует дистанционно с радиочастотным идентификатором подвижного объекта, получают от него код подвижного объекта, передают через локальную сеть свои координаты и код подвижного объекта в центральную ЭВМ.
Способ определения координат положения подвижного объекта в закрытых помещениях может быть реализован в варианте 2 так, что в помещениях (шахтах, складах), на элементах строительных конструкций закрепляют радиочастотные идентификаторы, в которые заносят коды координат положения этих радиочастотных идентификаторов (в местной системе координат), на подвижном объекте (человек, транспортное средство, груз) закрепляют считыватель, который подключают к радиомодему, в память которого заносят код подвижного объекта, в процессе перемещения подвижного объекта считыватель взаимодействует дистанционно с радиочастотными идентификаторами, получает из них коды координат положения этих радиочастотных идентификаторов, передает через радиомодем эти координаты и код подвижного объекта в центральную ЭВМ.
Задача определения координат положения подвижного объекта в закрытых помещениях и повышения точности определения этих координат до величины расстояния между двумя соседними неподвижно закрепленными считывателями или радиочастотными идентификаторами решена без использования глобальной спутниковой позиционирующей системы (GPS), которая повсеместно используется для определения координат положения автомобилей на автотрассах и других транспортных средств. Устранен существенный недостаток системы GPS -невозможность определения координат подвижного объекта при нахождении его в закрытом помещении: на складе, в ангаре, в туннеле. Это связано с тем эффектом, что сигналы спутниковой навигации, передаваемые спутниками системы, не принимаются спутниковой антенной, установленной на подвижном объекте, из-за экранирующих свойств капитальных стен, крыш зданий, толщи земли.
Для определения координат подвижных объектов предлагается применение радиочастотных идентификаторов и считывателей, которые используют для идентификации железнодорожных вагонов и контейнеров. Предлагается вместо кода-номера записывать в закрепленный считыватель или электронный идентификатор его координаты внутри склада, шахты, туннеля. В считыватель или электронный идентификатор, находящийся на подвижном объекте, предложено записывать код подвижного объекта.
Перечень чертежей
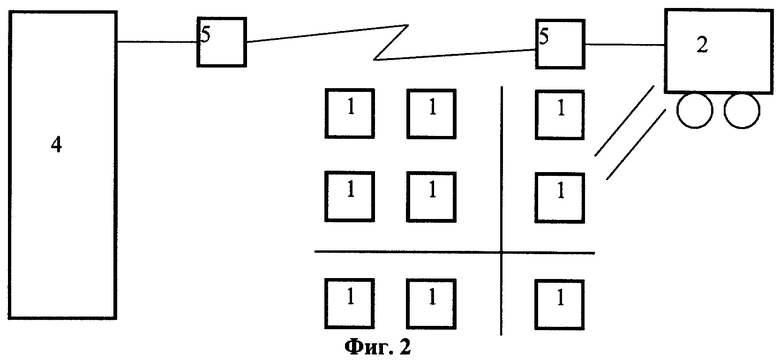
На фиг.1 изображена система для реализации способа определения координат положения подвижного объекта в закрытых помещениях (вариант 1).
На фиг.2 изображена система для реализации способа определения координат положения подвижного объекта в закрытых помещениях (вариант 2).
Пример варианта выполнения изобретения
На фиг.1 и 2 обозначены идентификатор 1, считыватель 2, приемные контроллеры интерфейса 3, электронная вычислительная машина (ЭВМ) 4, радиомодем 5.
Способ определения координат положения подвижного объекта в закрытых помещениях реализуется следующим образом. Составляется (или берется готовый) план здания, склада, шахты. Замеряются расстояния по этому плану между считывателями или радиочастотными идентификаторами, которые должны служить отметками координат. Например, для склада (ангара), в котором не имеется внутренних перегородок, на план можно нанести сетку с постоянным шагом между ячейками. В системе координат этого плана определяют координаты этих ячеек. В радиочастотные идентификаторы или считыватели записывают координаты ячеек, идентификаторы соответственно маркируются. На полу делается соответствующая разметка и высверливаются отверстия, в которые закладываются соответствующие идентификаторы, отверстия бетонируются. Можно под потолком натянуть проволоку, на которую закрепить идентификаторы. В шахте идентификаторы или считыватели можно закреплять с соответствующим шагом на потолке штрека. Выбор варианта установки считывателей или идентификаторов должен определяться вариантом проводной или беспроводной связи между подвижным объектом и ЭВМ, который приемлем для данного сооружения. Так, в шахте удобнее использовать проводную связь, поэтому рациональнее устанавливать считыватели. В большом ангаре проще можно организовать радиосвязь, поэтому рациональнее устанавливать радиочастотные идентификаторы. Считыватели объединяют проводным каналом (например, RS 485).
На фиг.1 изображен вариант 1 реализации способа, при котором в радиочастотный идентификатор 1 записывают код подвижного объекта (оператора склада, погрузчика, шахтера) и закрепляют его соответственно на поясе человека или на погрузчике. Стационарно устанавливают считыватели 2, объединенные проводным каналом, на строительных конструкциях зданий и сооружений. В составе каждого считывателя имеется контроллер соответствующего интерфейса, а в памяти находятся координаты положения считывателя в местной системе координат здания. Приемные контроллеры интерфейса 3 устанавливаются в ЭВМ 4. При перемещении идентификатора 1 по помещению он попадает под излучение ближайшего считывателя, тем самым получает энергию для ответной посылки. Идентификатор посылает записанный код подвижного объекта в считыватель. Считыватель пересылает этот код и код своего положения (координаты) в здании (сооружении) по проводному интерфейсу в ЭВМ. Информация обрабатывается, запоминается и отображается на мониторе совместно с планом здания (сооружения). Таким образом отслеживается положение подвижного объекта в закрытом помещении непрерывно во времени. Такая информация может иметь особую важность при проведении спасательных работ в шахтах после взрывов, т.к. положение каждого шахтера будет известно на момент взрыва с точностью установки считывателей.
На фиг.2 изображен вариант 2 реализации способа, при котором в радиочастотные идентификаторы 1 записывают коды их координат в сооружении и закрепляют на строительных конструкциях. В память считывателя 2 записывают код подвижного объекта (оператора склада, шахтера, важного груза, погрузчика) и закрепляют его соответственно на поясе человека, на погрузчике, на грузе. Считыватель периодически излучает немодулированный сигнал на заданной частоте (880-900 МГц) - тем самым снабжает ближайший радиочастотный идентификатор 1 энергией электрического питания.
Получив энергию, радиочастотный идентификатор 1 формирует ответную посылку, записанного в его памяти кода координат его положения в сооружении, в виде модулированного по амплитуде радиосигнала. Считыватель 2 принимает радиосигнал, запоминает код координат и пересылает этот код и код подвижного объекта через передающий радиомодем 5, приемный радиомодем 5 в ЭВМ 4. Информация обрабатывается, запоминается и отображается на мониторе совместно с планом здания (сооружения). Таким образом, отслеживается положение подвижного объекта в закрытом помещении непрерывно во времени.
Такая информация может иметь особую важность для контроля и учета работы персонала складов и арсеналов с секретным и особо опасным оборудованием, т.к. положение такого оборудования в помещении будет контролироваться постоянно.
Промышленная применимость
Предложенный способ определения координат положения подвижного объекта в закрытых помещениях промышленно реализуем в двух вариантах, позволяет обеспечить постоянный во времени мониторинг подвижных объектов во времени, позволяет ускорить поиск шахтеров после аварий в шахтах и упорядочить работу персонала на складах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ | 2013 |
|
RU2540799C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2465743C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2425396C1 |
| Способ мониторинга состояния подземных сооружений метрополитена и система для его реализации | 2020 |
|
RU2740514C1 |
| Способ мониторинга состояния подземных сооружений и система для его реализации | 2019 |
|
RU2717079C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2711632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ ВЫСОКОСКОРОСТНОГО СОСТАВА (ВАРИАНТЫ) | 2022 |
|
RU2816417C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470316C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ МЕТОК В УЧЕБНОМ ЗАВЕДЕНИИ | 2023 |
|
RU2814844C1 |
Способ определения координат положения подвижного объекта (ПО) в закрытых помещениях относится к автоматике и вычислительной технике и может быть использован в системах определения положения координат ПО - операторов складов, грузов и шахтеров. Достигаемый технический результат - повышение точности координат ПО до величины размера ячейки сетки с постоянным шагом, нанесенной на план помещения. В одном варианте электронные идентификаторы закрепляют на ПО, а считыватели закрепляют на элементах конструкции помещения. При приближении к считывателю ПО из его электронного идентификатора считывают код и, вместе с кодом считывателя, передают через контроллер локальной сети в ЭВМ. Положение считывателей определяется сеткой с постоянным шагом, нанесенной на план помещения. Коды считывателей и коды координат их положения запоминают в ЭВМ, где определяют координаты ПО и отображают его положение на мониторе совместно с планом помещения. 2 н.п. ф-лы, 2 ил.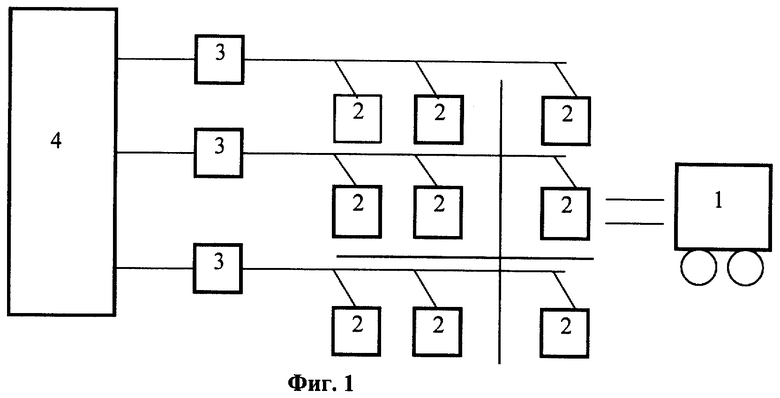
| Устройство соединения разделяемых элементов летательного аппарата | 2015 |
|
RU2630565C2 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Глухарь с винтовым и дом крупного шага | 1932 |
|
SU30045A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2013785C1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| US 4916455, 10.04.1990 | |||
| БУРЛАКОВ В | |||
| Радиочастотная идентификация | |||
| Электронный компоненты | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

