Предлагаемое устройство относится к области авиационной техники и предназначено для предотвращения столкновения воздушных судов и повышения безопасности полетов за счет определения истинного расстояния между воздушными судами с учетом высоты их полета и скорости сближения.
Известны устройства и системы, обеспечивающие безопасность полетов летательных аппаратов (авт. свид. СССР №№293.175, 926.611, 1.300.531, 1.792.541; патенты РФ №№2.111.505, 2.124.760, 2.126.976, 2.131.622, 2.134.910, 2.134.911, 2.256.125, 2.309.424; патенты США №№3.714.654, 4.400.780, 4.495.580, 4.789.965; патент Великобритании №2.232.316; патент Франции №2.037.222; патенты ЕР №№0.283.723, 0.396.071, 0.707.220; Анодина Т.Г. и др. Автоматизация управления воздушным движением. - М.: Транспорт, 1992, с.213-218 и другие).
Из известных устройств и систем наиболее близким к предлагаемому является «Устройство для определения расстояния между воздушными судами» (патент РФ №2.309.424, G01S 5/14, 2006), которое и выбрано в качестве прототипа.
Указанное устройство предназначено для предотвращения столкновения воздушных судов и повышения безопасности полетов за счет определения истинного расстояния между воздушными судами с учетом высоты их полета. При этом истинное расстояние между воздушными судами определяется с использованием наземной автоматизированной системы управления воздушным движением и бортовой автоматической системы. Это объясняется тем, что на земле решение принимает диспетчер, что связано с так называемым человеческим фактором и другими негативными явлениями.
В мировой практике известны случаи недобросовестного отношения диспетчеров к своим функциональным обязанностям, когда по вине диспетчерской службы происходили авиационные катастрофы. Поэтому возникает актуальная задача автономного дублирования при определении расстояния между воздушными судами с помощью аппаратуры, устанавливаемой на самих воздушных судах.
В известном устройстве данная задача решена.
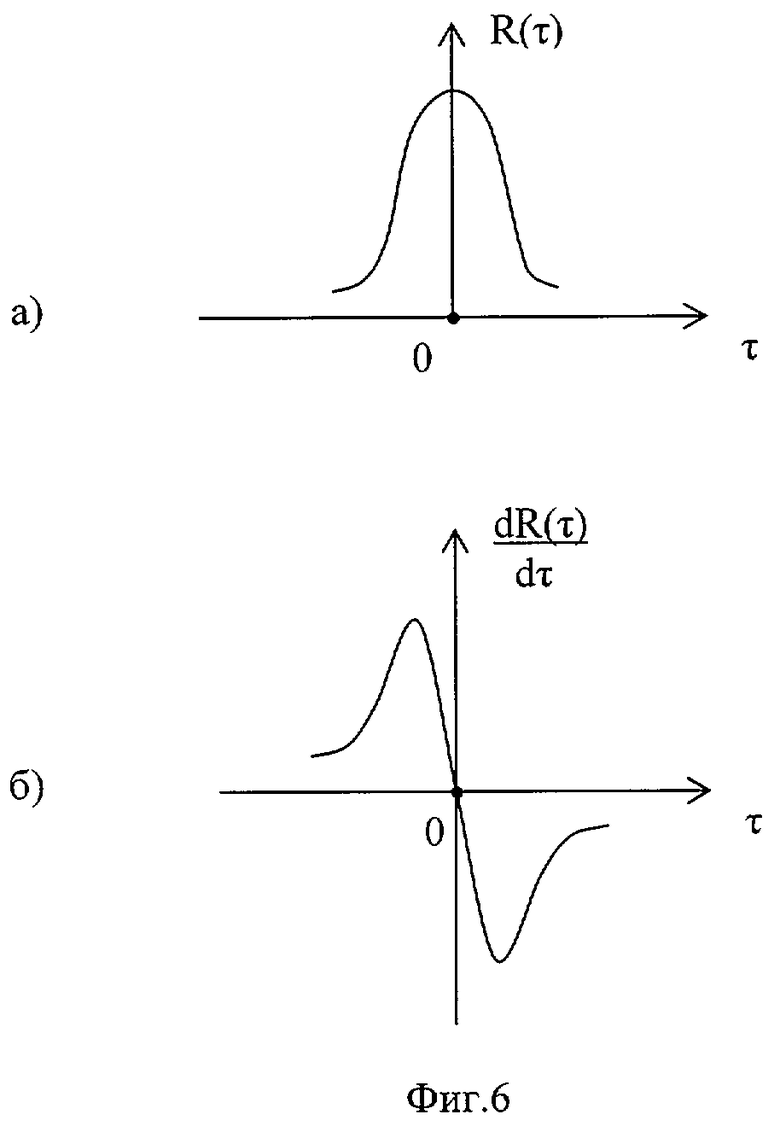
Однако данное устройство не обеспечивает возможности для определения скорости сближения воздушных судов, что снижает безопасность полетов. Кроме того, для точного измерения расстояния между воздушными судами необходимо возможно точнее определить временную задержку τ3 ретранслированного сигнала относительно запросного, соответствующую максимуму корреляционной функции R(τ). Но в области максимума корреляционная функция R(τ) имеет очень малую крутизну и изменяется незначительно при изменениях τ, т.е. имеет не очень ярко выраженную точку экстремума (фиг.6, а).
Гораздо более благоприятной для поиска максимума является форма производной от корреляционной функции  (фиг.6, б).
(фиг.6, б).
В точке τ=0 производная имеет значительную крутизну и, кроме того, меняет знак в зависимости от положения относительно точки τ=0.
Таким образом, отыскание максимума корреляционной функции R(τ) (максимальный принцип-решение экстремальной задачи) заменяется минимальным принципом измерения - стабилизацией нулевого значения регулируемой величины τ.
Технической задачей изобретения является повышение точности определения расстояния и скорости сближения между воздушными судами путем использования производной корреляционной функции.
Поставленная задача решается тем, что устройство для определения расстояния между воздушными судами, включающее, в соответствии с ближайшим аналогом, наземную автоматизированную систему управления воздушным движением, содержащую последовательно включенные первый измеритель азимута, первый сумматор, второй вход которого соединен с выходом второго измерителя азимута, блок вычисления косинуса, седьмой блок умножения, четвертый сумматор, второй блок вычисления корня квадратного и индикатор, последовательно включенные первый измеритель высоты, первый блок умножения, второй вход которого соединен с выходом первого измерителя высоты, второй сумматор, второй вход которого соединен с выходом второго блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего сумматора, и первый блок вычисления корня квадратного, выход которого соединен со вторым входом седьмого блока умножения, последовательно включенные первый измеритель наклонной дальности и второй блок умножения, второй вход которого соединен с выходом первого измерителя наклонной дальности, а выход подключен ко второму входу четвертого сумматора, третий вход которого через третий блок умножения соединен с выходами первого и второго измерителей высоты, последовательно включенные второй измеритель высоты, четвертый блок умножения, второй вход которого соединен с выходом второго измерителя высоты, и третий сумматор, второй вход которого соединен с выходом пятого блока умножения, последовательно включенные второй измеритель наклонной дальности и пятый блок умножения, второй вход которого соединен с выходом второго измерителя наклонной дальности, а выход подключен к четвертому входу четвертого сумматора, блок запроса и ретранслятор, которые устанавливаются на воздушных судах, при этом блок запроса выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом генератора модулирующего кода, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, первого дуплексера, вход-выход которого связан с первой приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, и усилителя второй промежуточной частоты, последовательно подключенных к выходу фазового манипулятора блока регулируемой задержки, второй выход которого подключен к индикатору дальности, первого перемножителя и фильтра нижних частот, ретранслятор выполнен в виде последовательно включенных третьего гетеродина, третьего смесителя, усилителя третьей промежуточной частоты, четвертого усилителя мощности, второго дуплексера, вход-выход которого связан со второй приемопередающей антенной, и третьего усилителя мощности, выход которого соединен со вторым входом третьего смесителя, отличается от ближайшего аналога тем, что блок запроса снабжен дифференциатором, усилителем низкой частоты, удвоителем фазы, делителем фазы на два, двумя узкополосными фильтрами, вторым перемножителем и измерителем доплеровской частоты, причем выход усилителя второй промежуточной частоты через дифференциатор соединен со вторым входом первого перемножителя, выход фильтра нижних частот через усилитель низкой частоты соединен со вторым входом блока регулируемой задержки, к выходу усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, делитель фазы на два, первый узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом задающего генератора, второй узкополосный фильтр и измеритель доплеровской частоты.
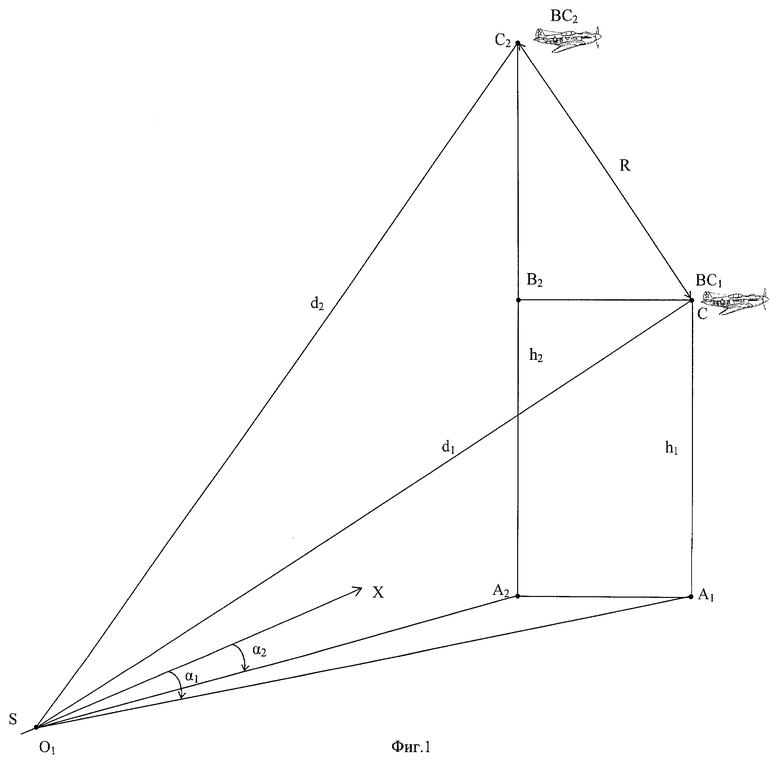
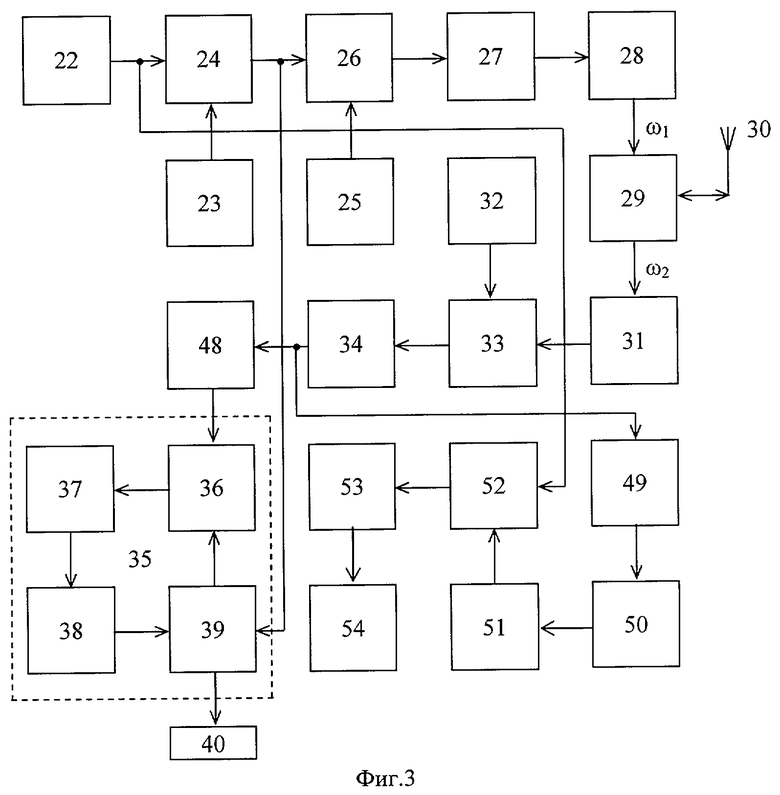
Геометрическая схема расположения двух воздушных судов BC1 и BC2 и наземной автоматизированной системы управления воздушным движением изображена на фиг.1. Структурная схема наземной автоматизированной системы управления воздушным движением представлена на фиг.2. Структурная схема блока запроса изображена на фиг.3. Структурная схема ретранслятора изображена на фиг.4. Частотная диаграмма, иллюстрирующая преобразование сигналов, показана на фиг.5. Корреляционная функция и ее производная изображены на фиг.6. Временные диаграммы, поясняющие работу блока запроса и ретранслятора, показаны на фиг.7.
Устройство для определения расстояния между воздушными судами содержит наземную автоматизированную систему управления воздушным движением, блок запроса и ретранслятор, устанавливаемые на воздушных судах.
Наземная автоматизированная система управления воздушным движением содержит последовательно включенные первый измеритель 1 азимута, первый сумматор 7, второй вход которого соединен с выходом второго измерителя 4 азимута, блок 13 вычисления косинуса, седьмой блок 18 умножения, четвертый сумматор 19, второй блок 20 вычисления корня квадратного и индикатор 21, последовательно включенные первый измеритель 2 высоты, первый блок 8 умножения, второй вход которого соединен с выходом первого измерителя 2 высоты, второй сумматор 14, второй вход которого соединен с выходом второго блока 9 умножения, шестой блок 16 умножения, второй вход которого соединен с выходом третьего сумматора 15, и первый блок 17 вычисления корня квадратного, выход которого соединен со вторым входом седьмого блока 18 умножения, последовательно включенные первый измеритель 3 наклонной дальности и второй блок 9 умножения, второй вход которого соединен с выходом первого измерителя 3 наклонной дальности, а выход подключен ко второму входу четвертого сумматора 19, третий вход которого через третий блок 10 умножения соединен с выходом первого 2 и второго 5 измерителей высоты, последовательно включенные второй измеритель 5 высоты полета, четвертый блок 11 умножения, второй вход которого с выходом второго измерителя 5 высоты, и третий сумматор 15, второй вход которого соединен с выходом пятого блока 12 умножения, последовательно включенные второй измеритель 6 наклонной дальности и пятый блок 12 умножения, второй вход которого соединен с выходом измерителя 6 наклонной дальности, а выход подключен к четвертому входу четвертого сумматора 19.
Блок запроса содержит последовательно включенные задающий генератор 22, фазовый манипулятор 24, второй вход которого соединен с выходом генератора 23 модулирующего кода, первый смеситель 26, второй вход которого соединен с выходом первого гетеродина 25, усилитель 27 первой промежуточной частоты, первый усилитель 28 мощности, первый дуплексер 29, вход-выход которого связан с первой приемопередающей антенной 30, второй усилитель 31 мощности, второй смеситель 33, второй вход которого соединен с выходом второго гетеродина 32, усилитель 34 второй промежуточной частоты, дифференциатор 48, первый перемножитель 36, фильтр 37 нижних частот, усилитель 38 низкой частоты и блок 39 регулируемой задержки, второй вход которого соединен с выходом фазового манипулятора 24, первый выход соединен со вторым входом первого перемножителя 36, а второй выход подключен к индикатору 40 дальности, последовательно подключенные к выходу усилителя 34 второй промежуточной частоты удвоитель 49 фазы, делитель 50 фазы на два, первый узкополосный фильтр 51, второй перемножитель 52, второй вход которого соединен с выходом задающего генератора 22, второй узкополосный фильтр 53 и измеритель 54 доплеровской частоты.
Второй перемножитель 36, фильтр 37 нижних частот, усилитель 38 низкой частоты и блок 39 регулируемой задержки составляют коррелятор 35.
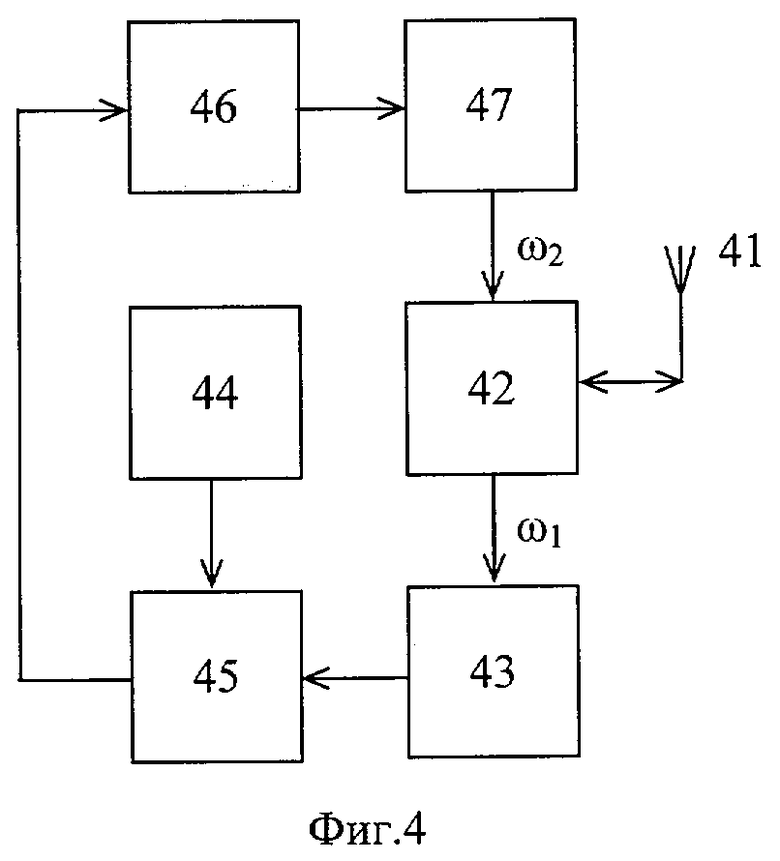
Ретранслятор содержит последовательно включенные третий гетеродин 44, третий смеситель 45, усилитель 46 третьей промежуточной частоты, четвертый усилитель 47 мощности, второй дуплексер 42, вход-выход которого связан со второй приемопередающей антенной 41, и третий усилитель 43 мощности, выход которого соединен со вторым входом третьего смесителя 45.
Устройство работает следующим образом.
На наземной автоматизированной системе управления воздушным движением первый 1 и второй 4 измерители азимутов воздушных судов BC1 и ВС2 определяют азимуты α1 и α2 соответственно (фиг.1). Сигнал, пропорциональный азимуту α1 первого BC1, поступает на первый вход первого сумматора 7, на второй вход которого поступает сигнал, пропорциональный азимуту α2 второго ВС2. Сигнал на выходе первого сумматора 7 пропорционален разности азимутов первого BC1 и второго ВС2: α1-α2. Этот сигнал поступает на вход блока 13 вычисления косинуса, на выходе которого сигнал пропорционален Cos (α1-α2). Данный сигнал поступает на первый вход седьмого блока 18 умножения.
Первый 2 и второй 5 измерители высоты полета воздушных судов BC1 и ВС2 определяют высоты h1 и h2 полета соответственно. Сигнал, пропорциональный высоте h1, поступает на первый и второй входы первого блока 8 умножения и на первый вход третьего блока 10 умножения. Сигнал, пропорциональный  , с выхода первого блока 8 умножения поступает на первый вход второго сумматора 14.
, с выхода первого блока 8 умножения поступает на первый вход второго сумматора 14.
Сигнал, пропорциональный высоте h2 полета второго ВС2, поступает на первый и второй входы четвертого блока 11 умножения и на второй вход третьего блока 10 умножения. Сигнал, пропорциональный  , с выхода четвертого блока 11 умножения поступает на второй вход третьего сумматора 15.
, с выхода четвертого блока 11 умножения поступает на второй вход третьего сумматора 15.
Первый 3 и второй 6 измерители наклонных дальности до воздушных судов BC1 и BC2 определяют наклонные дальности d1 и d2 соответственно.
Сигнал, пропорциональный d1, поступает на первый и второй входы второго блока 9 умножения, с выхода которого сигнал, пропорциональный  , поступает на второй вход сумматора 14 и на второй вход четвертого сумматора 19.
, поступает на второй вход сумматора 14 и на второй вход четвертого сумматора 19.
Сигнал, пропорциональный d2, поступает на первый и второй входы пятого блока 12 умножения, с выхода которого сигнал, пропорциональный  , поступает на второй вход третьего сумматора 15 и четвертый вход четвертого сумматора 19.
, поступает на второй вход третьего сумматора 15 и четвертый вход четвертого сумматора 19.
На выходе второго сумматора 14 сигнал пропорционален разности квадратов наклонной дальности d1 до первого воздушного судна BC1 и его высоты h1:  . Этот сигнал поступает на второй вход шестого блока 16 умножения, с выхода которого сигнал, пропорциональный
. Этот сигнал поступает на второй вход шестого блока 16 умножения, с выхода которого сигнал, пропорциональный
поступает на вход первого блока 17 вычисления корня квадратного, с выхода которого сигнал, пропорциональный

поступает на второй вход седьмого блока 18 умножения, на первый вход которого поступает сигнал, пропорциональный Cos (α1-α2). С выхода седьмого блока 18 умножения сигнал, пропорциональный

поступает на первый вход четвертого сумматора 19.
На третий вход четвертого сумматора 19 поступает сигнал с выхода третьего блока 10 умножения, который пропорционален произведению высоты h1 первого воздушного судна BC1 и высоты h2 второго воздушного судна ВС2: h1*h2.
На выходе четвертого сумматора 19 сигнал пропорционален квадрату расстояния между первым BC1 и вторым ВС2 воздушными судами:

Этот сигнал поступает на вход второго блока 20 вычисления корня квадратного, с выхода которого сигнал, пропорциональный расстоянию между первым BC1 и вторым ВС2 воздушными судами

поступает на индикатор 21 отображения воздушной обстановки и индицируется в формуляре сопровождения.
Одновременно на первом BC1 или втором ВС2 воздушном судне задающим генератором 22 формируется высокочастотное колебание (фиг.7, а)
Uc(t)=υc*Cos(ωct+φc), 0≤t≤Tc,
где υс, ωс, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания,
которое поступает на первый вход фазового манипулятора 24, на второй вход которого подается модулирующий код M1(t) (фиг.7, б).
На выходе фазового манипулятора 24 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.7, в)
U1(t)=υc*Cos[ωct+φк(t)+φc], 0≤t≤Tc,
где φk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг.7, б), причем φk(t)=Const при k*τэ<t<(k+1) * τэ и может изменяться скачком при t=k*τэ, т.е. на границах между элементарными посылками (k=1, 2,… N);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc (Tc=N*τэ),
который поступает на первый вход смесителя 26, на второй вход которого подается напряжение первого гетеродина 25
Uг1(t)=υг1*Cos(ωг1t+φг1).
На выходе первого смесителя 26 образуются напряжения комбинационных частот. Усилителем 27 выделяется напряжение первой промежуточной (суммарной) частоты (фиг.7, г)
Uпр1(t)=υпр1*Cos[ωпр1t+φк(t)+φпр1], 0≤t≤Tc,
где υпр1=1/2*υc*υг1;
ωпр1=ωс+ωг1=ω1 - первая промежуточная (суммарная) частота;
φпр1=φс+φг1,
которое после усиления в усилителе 28 мощности через дуплексер 29 поступает в приемопередающую антенну 30, излучается ею в эфир на частоте ω1=ωпр1, улавливается приемопередающей антенной 41 ретранслятора, установленного на другом ВС, и через дуплексер 42 и усилитель 43 мощности поступает на первый вход третьего смесителя 45, на второй вход которого подается напряжение третьего гетеродина 44
UГ3(t)=υг3*Cos(ωг3t+φг3).
На выходе смесителя 45 образуются напряжения комбинационных частот. Усилителем 46 выделяется напряжение второй промежуточной (разностной) частоты
Uпр2(t)=υпр2*Cos[ωпp2t+φк(t)+φnp2], 0≤t≤T c,
где υпр2=1/2*υпр1*υг3;
ωпр2=ω1-ωг3=ω2 - вторая промежуточная (разностная) частота;
φпр2=φпр1-φг3,
которое после усиления в усилителе 47 мощности поступает через дуплексер 42 в приемопередающую антенну 41, излучается ею в эфир на частоте ω2, улавливается приемопередающей антенной 30 и через дуплексер 29 и усилитель 31 мощности поступает на первый вход второго смесителя 33. На второй вход последнего подается напряжение второго гетеродина 32
UГ2(t)=υг2*Cos(ωг2t+φг2).
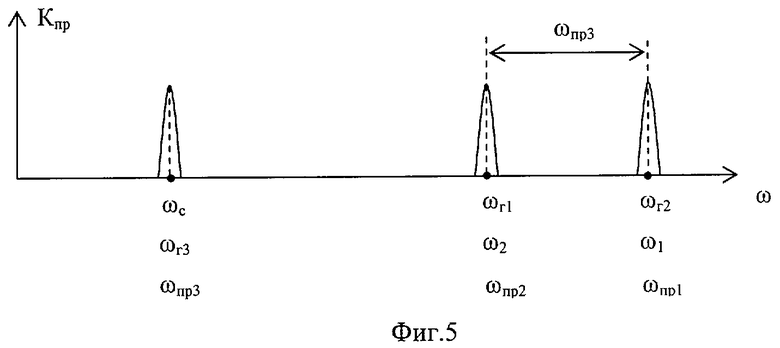
На выходе смесителя 33 образуются напряжения комбинационных частот. Усилителем 34 выделяется напряжение третьей промежуточной (разностной) частоты (фиг.7,д)
Uпр3(t)=υпр3*Cos[(ωпр3+ΩД)*(t-τз)-φк(t-τз)+φпр3], 0≤t≤T c,
где υпр3=1/2*υпр2*υг2;
ωпр3=ωг2-ω2=ωс - третья промежуточная (разностная) частота;
φпр3=φг2-φпр2,
τз=2R/С - время запаздывания ретранслированного сигнала;
R - расстояние между воздушными судами;
±Ωд - доплеровское смещение частоты;
С - скорость распространения радиоволн,
которое поступает на первый вход дифференциатор 48, на выходе которого образуется напряжение, пропорциональное 
Это напряжение поступает на первый вход перемножителя 36, на второй вход которого через блок 39 регулируемой задержки подается сложный ФМн-сигнал U1(t) (фиг.7, в) с выхода фазового манипулятора 24. Полученное на выходе перемножителя 36 напряжение пропускается через фильтр 37 нижних частот, на выходе которого формируется производная корреляционной функции  (фиг.6, б).
(фиг.6, б).
Если указанная производная не равна нулю, то на выходе фильтра 37 нижних частот формируется постоянное напряжение, амплитуда которого пропорциональна степени отклонения производной корреляционной функции от нулевого значения, а полярность - направлению отклонения.
Это напряжение через усилитель 38 низкой частоты воздействует на управляющий вход блока 39 регулируемой задержки, изменяя временную задержку τ так, чтобы производная корреляционной функции была равна нулю. Индикатор 40 дальности, связанный с блоком 39 регулируемой задержки, позволяет непосредственно считывать измеренное значение расстояния R между воздушными судами
 .
.
Следовательно, задача измерения дальности (расстояния) R сводится к измерению временной задержки τ3 ретранслированного сигнала относительно запросного.
Напряжение Uпр3(t) с выхода усилителя 34 третьей промежуточной частоты одновременно поступает на вход удвоителя 49 фазы. В качестве последнего может использоваться перемножитель, на два входа которого подается одно и то же напряжение.
На выходе удвоителя 49 фазы образуется гармоническое колебание
U2(t)=υ2*Cos[2(ωпр3±ΩД)*(t-τ3)+2φпр3], 0≤t≤T c,
где  ;
;
в котором фазовая манипуляция уже отсутствует, так как 2φк(t-τз)={0, 2π}.
Ширина спектра ΔfC сложного ФМн-сигнала определяется длительностью τэ его элементарных посылок
 .
.
Тогда как ширина спектра Δf2 его второй гармоники определяется длительностью Tc сигнала
 .
.
Следовательно, при удвоении фазы широкополосного ФМн-сигнала его ширина спектра сворачивается в N раз
Гармоническое колебание U2(t) поступает на вход делителя 50 фазы на два, на выходе которого образуется гармоническое колебание
U3(t)=υ3*Cos[(ωпр3±Ωд)*(t-τз)+φпр3], 0≤t≤T c,
которое выделяется узкополосным фильтром 51 и поступает на первый вход перемножитель 52. На второй вход последнего подается запросный сигнал UC(t) с выхода задающего генератора 22. На выходе перемножителя 52 образуется напряжение, из которого узкополосным фильтром 53 выделяется напряжение доплеровской частоты
U4(t)=υ4*Cos(±Ωд*t+φ4), 0≤t≤Tc,
где υ4=1/2*υc*υ3;
φ4=φc-φпр3,
которое поступает на вход измерителя 54 доплеровской частоты, который обеспечивает измерение доплеровской частоты ±Ωд. Причем величина и знак доплеровской частоты определяют величину и направление радиальной скорости, т.е. скорость сближения или расхождения воздушных судов.
Если дальность (расстояние между воздушными судами) становится меньше некоторого порога и воздушные суда сближаются со скоростью выше пороговой, то экипаж воздушного судна принимает соответствующее решение по обеспечению безопасности полета.
Таким образом, предлагаемое устройство по сравнению с прототипом обеспечивает повышение точности определения расстояния и скорости сближения между воздушными судами. Это достигается использованием производной корреляционной функции, которая позволяет значительно повысить точность и чувствительность дальномера.
Продифференцировав один из входных сигналов, на выходе коррелятора формируется знакопеременный сигнал с большей крутизной в области максимума корреляционной функции (минимума ее производной), который может быть использован для автоматического управления блоком регулируемой задержки. Преимуществом такой схемы является относительная простота получения нужного сигнала рассогласования.
Определение расстояния между воздушными судами с использованием минимума производной корреляционной функции (прохождение через нуль), наряду с высокой точностью и чувствительностью, обладает еще одним весьма существенным преимуществом нулевого метода, а именно: амплитуда входных сигналов и ее флуктуации не оказывают влияния на результат определения расстояния между воздушными судами.
Кроме того, предлагаемое устройство позволяет определить скорость сближения или расхождения воздушных судов, что способствует повышению безопасности полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2360809C1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2008 |
|
RU2397548C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373082C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ДВУХПРОВОДНЫХ СЕТЯХ С ЗАЩИТОЙ ОТ ХИЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2439588C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2010 |
|
RU2429544C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В ПОДЗЕМНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381467C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2378138C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2009 |
|
RU2418714C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2009 |
|
RU2385246C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369418C1 |

Изобретение относится к области авиационной техники. Технический результат заключается в повышении точности определения расстояния и скорости сближения между воздушными судами путем использования производной корреляционной функции. Для этого заявленное устройство содержит наземную автоматизированную систему управления воздушным движением, блок запроса и ретранслятор, установленные на воздушных судах, при этом наземная автоматизированная система управления воздушным движением включает измерители азимута, измерители высоты, измерители наклонной дальности, сумматоры, блоки умножения, блок вычисления косинуса, блоки вычисления корня квадратного и индикатор, блок запроса включает в себя задающий генератор, генератор модулирующего кода, фазовый манипулятор, гетеродины, смесители, усилитель первой промежуточной частоты, усилители мощности, дуплексер, приемопередающую антенну, усилитель второй промежуточной частоты, коррелятор, перемножители, фильтр нижних частот, усилитель низкой частоты, блок регулируемой частоты, индикатор дальности, дифференциатор, удвоитель фазы, делитель фазы на два, узкополосные фильтры и измеритель доплеровской частоты, а ретранслятор содержит приемопередающую антенну, дуплексер, усилители мощности, гетеродин, смеситель и усилитель третьей промежуточной частоты. 7 ил.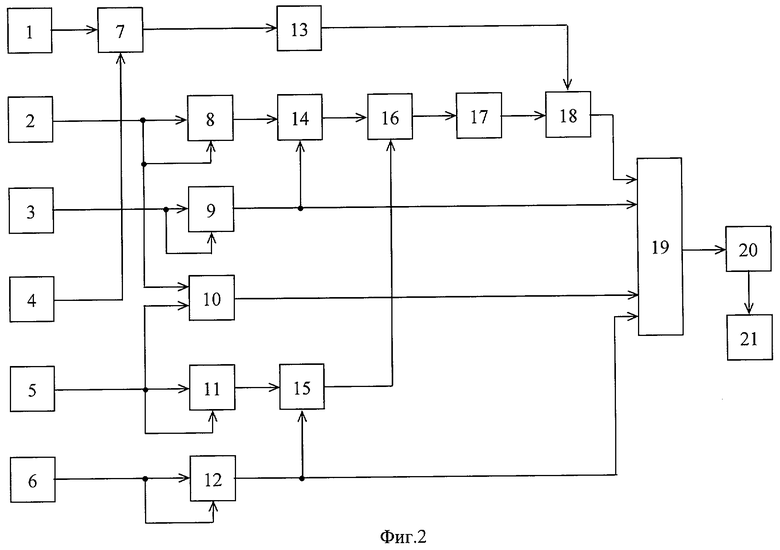
Устройство для определения расстояния между воздушными судами, включающее наземную автоматизированную систему управления воздушным движением, содержащую последовательно включенные первый измеритель азимута, первый сумматор, второй вход которого соединен с выходом второго измерителя азимута, блок вычисления косинуса, седьмой блок умножения, четвертый сумматор, второй блок вычисления корня квадратного и индикатор, последовательно включенные первый измеритель высоты, первый блок умножения, второй вход которого соединен с выходом первого измерителя высоты, второй сумматор, второй вход которого соединен с выходом второго блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего сумматора, и первый блок вычисления корня квадратного, выход которого соединен с вторым входом седьмого блока умножения, последовательно включенные первый измеритель наклонной дальности и второй блок умножения, второй вход которого соединен с выходом первого измерителя наклонной дальности, а выход подключен к второму входу четвертого сумматора, третий вход которого через третий блок умножения соединен с выходами первого и второго измерителей высоты, последовательно включенные второй измеритель высоты, четвертый блок умножения, второй вход которого соединен с выходом второго измерителя высоты, и третий сумматор, второй вход которого соединен с выходом пятого блока умножения, последовательно включенные второй измеритель наклонной дальности и пятый блок умножения, второй вход которого соединен с выходом второго измерителя наклонной дальности, а выход подключен к четвертому входу четвертого сумматора, блок запроса и ретранслятор, которые устанавливаются на воздушных судах, при этом блок запроса выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом генератора модулирующего кода, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, первого дуплексера, вход-выход которого связан с первой приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, и усилителя второй промежуточной частоты, последовательно подключенных к выходу фазового манипулятора блока регулируемой задержки, второй выход которого подключен к индикатору дальности, первого перемножителя, и фильтра нижних частот, ретранслятор выполнен в виде последовательно включенных третьего гетеродина, третьего смесителя, усилителя третьей промежуточной частоты, четвертого усилителя мощности, второго дуплексера, вход-выход которого связан с второй приемопередающей антенной, и третьего усилителя мощности, выход которого соединен с вторым входом третьего смесителя, отличающееся тем, что блок запроса снабжен дифференциатором, усилителем низкой частоты, удвоителем фазы, делителем фазы на два, двумя узкополосными фильтрами, вторым перемножителем и измерителем доплеровской частоты, причем выход усилителя второй промежуточной частоты через дифференциатор соединен с вторым входом первого перемножителя, выход фильтра нижних частот через усилитель низкой частоты соединен с вторым входом блока регулируемой задержки, к выходу усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, делитель фазы на два, первый узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом задающего генератора, второй узкополосный фильтр и измеритель доплеровской частоты.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2006 |
|
RU2309424C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2003 |
|
RU2256195C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2007 |
|
RU2346293C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| US 4495580 A, 22.01.1985. | |||

