Изобретение относится к системе и способу измерения скорости.
Для измерения скоростей устройства или системы в настоящее время применяются самые различные способы и устройства. Они, однако, как правило, не особенно точны, занимают много места или требуют внешней информации.
В главе „Navigation, Sagnac-Effekt und Michelson-Experiment" M. Böhm в своей книге „Ortung und Navigation", 1984 г., представляет гипотетические рассуждения об измерении абсолютной скорости. Предполагается, что лазер посылает сигнал по двум параллельным соседним путям распространения одинаковой длины с разными показателями преломления. Посредством разности времени прохождения можно непосредственно измерить инерциальную поступательную скорость. В качестве альтернативы упоминается соответствующая обработка звуковых сигналов. В качестве результата называется невозможность.
В основе изобретения лежит задача обеспечения реально применяемого, независимого и надежного измерения скорости.
Эта задача решается посредством системы для измерения скорости. Система содержит, по меньшей мере, один источник, выполненный для создания, по меньшей мере, одного излучения. Система содержит далее, по меньшей мере, два канала, по которым, по меньшей мере, одна доля, по меньшей мере, одного, созданного, по меньшей мере, одним источником излучения распространяется с соответственно известной длиной волны и соответственно известной скоростью распространения. При этом каналы выполнены таким образом, что поступательное движение устройства вызывает фазовый сдвиг между долями излучения, распространяющимися, по меньшей мере, по двум каналам. Система содержит, кроме того, средства оценки, выполненные для регистрации долей излучения, покидающих, по меньшей мере, два канала, и для определения скорости устройства, по меньшей мере, в одном пространственном направлении посредством оценки изменения фазового сдвига между зарегистрированными долями излучения по сравнению с фазовым сдвигом при спокойном устройстве. Система выполнена с возможностью предотвращения или компенсации изменения фазового сдвига зарегистрированных средствами оценки долей излучения на основе вращательного движения устройства.
Длиной волны здесь называется универсальная физическая длина волны, присваиваемая каждому объекту.
Задача решается также посредством системы, содержащей одно или несколько таких устройств для регистрации скорости системы.
Задача решается также посредством способа измерения скорости системы. Способ включает в себя создание, по меньшей мере, одного излучения. Способ включает в себя также передачу соответственно, по меньшей мере, одной доли, по меньшей мере, одного излучения, по меньшей мере, по двум каналам с соответственно известной длиной волны и соответственно известной скоростью распространения. При этом поступательное движение устройства вызывает фазовый сдвиг между долями излучения, распространяющимися, по меньшей мере, по двум каналам. Способ включает в себя также регистрацию долей излучения, покидающих, по меньшей мере, два канала, и определение скорости устройства, по меньшей мере, в одном пространственном направлении посредством оценки изменения фазового сдвига между зарегистрированными долями излучения по сравнению с фазовым сдвигом при спокойном устройстве. При этом изменение фазового сдвига долей излучения предотвращают или компенсируют на основе вращательного движения устройства.
Изобретение основано, во-первых, на том рассуждении, что эффект Саньяка может быть использован для измерения скорости не только гипотетически. Изобретение основано, во-вторых, на том рассуждении, что в гипотетическом устройстве Бема результат измерения может быть, правда, искажен из-за вращательных движений устройства.
Поэтому предложено, что для определения скорости, с одной стороны, регистрируют изменение фазового сдвига между распространяющимися по двум разным каналам долями излучения, а, с другой стороны, препятствуют влиянию вращательного движения. Направление измерения определяют при этом с помощью степеней свободы распространения, подаваемых к каналам долей излучения.
Изобретение имеет то преимущество, что оно обеспечивает надежное и независимое измерение скорости. Оно может быть реализовано при этом в наименьшем пространстве и использовано тем самым особенно гибко и разнообразно.
Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы.
По меньшей мере, один источник может быть выполнен самым разным образом. Он может содержать, например, источник света, например в виде произвольного лазера. В качестве альтернативы источник может содержать также мазер или источник электронного излучения. По меньшей мере, один источник может далее создавать излучения в месте излучения или в пространственно отделенных местах излучения. Подаваемые, по меньшей мере, к двум каналами доли излучения могут, кроме того, выдаваться одновременно или с временным промежутком. Речь идет лишь о том, что возникающий в обоих каналах фазовый сдвиг между долями излучения в спокойном состоянии устройства известен. Понятно, что если, по меньшей мере, один источник создает несколько излучений, то соответствующая доля излучения может включать в себя также соответственно полное излучение.
Используемые каналы могут быть выполнены также самым разным образом, если они подходят для передачи созданных источником долей излучения. Каналы могут состоять из одного материала или разных материалов. Также отдельный канал может быть однородным или неоднородным. Он может состоять, следовательно, сплошь из одного материала или может быть составлен из нескольких отрезков разных материалов. Если источник содержит источник света, то каналы могут содержать световоды или отражатели, которые за счет отклонений доли излучения определяют характер соответствующего канала.
Изменение фазового сдвига между распространяющимися, по меньшей мере, по двум каналам долями излучения на основе поступательного движения устройства может быть достигнуто за счет того, что доли излучения по обоим каналам в спокойном состоянии устройства требуют разного времени прохождения по каналу, т.е. за счет разной физической длины каналов. Это может быть достигнуто, например, за счет того, что геометрическая длина пути по одному каналу больше, чем по другому, и/или за счет того, что скорость распространения по одному каналу больше, чем по другому, например, из-за разных показателей преломления различных применяемых материалов. Чем больше разность времени прохождения по обоим каналам, тем выше разрешение зарегистрированной скорости.
Далее влияние вращательного движения на определение скорости может быть исключено различными путями.
Так, например, уже каналы по своей геометрической форме могут быть выполнены с возможностью предотвращения с самого начала вращательного влияния на фазовое положение долей излучения. Это может быть достигнуто за счет того, что каналы вне воображаемой прямой имеют одинаковые по величине доли на противоположных сторонах этой прямой. Воображаемая прямая может соединять при этом, например, общие начальную и конечную точки каналов. Она соответствует, как правило, направлению измерения устройства.
В качестве альтернативы может быть осуществлена также последующая вычислительная компенсация вращательного движения. Для этого вращательное движение устройства регистрируют отдельно. Полученное изменение фазового сдвига долей излучения по двум каналам корректируют затем в соответствии с вращательным влиянием до определения скорости.
В одном предпочтительном варианте осуществления изобретения, по меньшей мере, два канала выполнены так, что они, имеют, по меньшей мере, один общий участок. Подаваемые, по меньшей мере, к двум каналам доли излучения проходят тогда общий участок канала в противоположных направлениях. За счет этого для одного из каналов детали могут быть минимизированы по числу и/или величине, например числу отражателей или длине световодов и т.д. Кроме того, общий участок канала уменьшает отличия в температуре и других условиях, по меньшей мере, в двух каналах, которые могли бы нежелательно повлиять на фазовый сдвиг.
Общий участок канала может быть выполнен, например, так, что он имеет первый отрезок, проходимый одной из долей излучения в одном направлении измерения устройства, и второй отрезок, проходимый этой долей излучения в направлении, противоположном направлению измерения, причем оба отрезка при спокойном устройстве имеют разную физическую длину. Это гарантирует, что всегда один из каналов имеет в направлении измерения большую физическую длину, чем другой, по меньшей мере, из двух каналов.
В одном предпочтительном варианте осуществления изобретения устройство содержит далее, по меньшей мере, один датчик ускорения, с помощью которого даже без движения может быть создано отношение к локальной нормали к силе тяжести. Это значит, что датчик ускорения может быть использован для определения ориентации устройства в пространстве в начальном состоянии, исходя из которого скорость устройства определяют, согласно изобретению. Такой датчик ускорения может быть реализован, например, также посредством ватерпаса.
Для измерения скорости в одном пространственном направлении требуется лишь устройство, согласно изобретению. Это устройство ориентируют тогда так, чтобы направление его измерения совпадало с желаемым пространственным направлением. Устройство можно, кроме того, вращать до тех пор, пока не будет достигнуто максимальное изменение фазового сдвига между долями излучения. Направление движения соответствует тогда направлению измерения устройства в положении, в котором достигается максимальное изменение.
Для более простой и быстрой регистрации скорости в нескольких направлениях в системе, согласно изобретению, могут использоваться также несколько устройств, согласно изобретению, которые регистрируют скорость одновременно в разных пространственных направлениях. При этом для создания излучения одновременно для нескольких устройств может быть использован единственный источник. Например, источник света может вводить световой сигнал одновременно в несколько подходящим образом ориентированных световодов. Для полной регистрации поступательных и вращательных движений системы она содержит, по меньшей мере, шесть устройств, согласно изобретению. За счет математических вычислений тогда при подходящем расположении направлений измерений шести устройств можно регистрировать по величине любое произвольное движение.
Точность измерений зависит, в частности, от длины волн излучений, а также от разностей времени прохождения, по меньшей мере, по двум каналам.
Возможная частота повторений измерений зависит, в частности, от времени прохождения доли излучения по каналу с более длительным временем прохождения и от необходимого для оценки времени.
Устройство, согласно изобретению, может быть использовано для определения его собственной скорости. В этом случае само устройство может содержать дополнительные детали и функции, в частности такие, для которых измерение скорости представляет интерес. Если устройство приводят в твердое отношение к другому подвижному объекту, то посредством устройства, согласно изобретению, можно также определить скорость любых объектов. То же относится к системе, согласно изобретению.
Изобретение может применяться в самых различных областях, например для определения скорости, места и положения в навигационной системе или для регистрации движений компьютерной мыши.
Понятно, что эти функции структурных признаков в представленных примерах выполнения устройства, согласно изобретению, могут быть использованы соответственно и в качестве функциональных признаков в примерах осуществления способа, согласно изобретению, и наоборот.
Варианты осуществления изобретения более подробно поясняются ниже со ссылкой на чертежи, на которых изображают:
- фиг.1: схематично первый пример выполнения устройства, согласно изобретению;
- фиг.2: схематично второй пример выполнения устройства, согласно изобретению;
- фиг.3: схематично третий пример выполнения устройства, согласно изобретению;
- фиг.4: схематично четвертый пример выполнения устройства, согласно изобретению;
- фиг.5: схематично ориентацию измерительных устройств для измерения любых скоростей с помощью устройства, согласно изобретению.
На фиг.1 схематично изображен первый пример выполнения устройства, согласно изобретению, обеспечивающий измерение скорости в одном направлении. В устройстве 1 источник 10 в месте излучения соединен двумя каналами 11, 12 с фазовым компаратором 13 в месте измерения. Дополнительно с фазовым компаратором 13 соединено вращательное измерительное устройство 14.
Источник 10 создает в момент to излучение, доли которого в одинаковом фазовом положении подаются к обоим каналами 11, 12. Оба канала 11, 12 выполнены так, что долям излучения требуется разное время для прохождения образованного соответствующим каналом пути.
Источник 10 может быть, например, лазером, излучающим световой сигнал, а два канала 11, 12 могут быть, например, световодами одинаковой длины из разных материалов с разными показателями преломления.
В месте измерения доли излучения совмещаются обоими каналами 11, 12 в интерференционный сигнал. Фазовый компаратор 13 обрабатывает интерференционный сигнал. Если устройство 1 находится в состоянии покоя, то вследствие разных скоростей распространения по обоим каналам 11, 12 возникает определенный фазовый сдвиг между долями излучения. По каналу 11 в состоянии покоя может возникнуть, например, время прохождения t1, а по каналу 12 - время прохождения t2. Время прохождения t1 при этом на коэффициент а больше, чем t2, т.е. t1=a*t2. Пока устройство не движется, в месте измерения возникает, следовательно, интерференционный сигнал из созданных в моменты t0 и t0+(t1-t2) долей излучения.
Если же устройство движется с составляющей направления, соответствующей линии соединения между местом излучения и местом измерения, то этот фазовый сдвиг изменяется.
Если устройство 1 движется со скоростью v=Δl/Δt в направлении от места излучения к месту измерения, то для обоих каналов 11, 12 за счет этого движения фазовый сдвиг суммируется. При этом Δl обозначает длину каналов 11, 12, a Δt - время, требующееся устройству 1 для прохождения расстояния Δl. Время прохождения возрастает за счет эффекта Саньяка по каналу 12 на Δt, а по каналу 11 - на a*Δt. На выходе канала 11 имеет место, таким образом, фазовое положение, соответствующее фазовому положению спокойного канала со временем прохождения t1+a*Δt, тогда как на выходе канала 12 имеет место фазовое положение, соответствующее фазовому положению спокойного канала со временем прохождения t2+Δt. Изменение фазового сдвига между долями излучения по обоим каналам 11, 12 в зависимости от скорости v на (а-1)*Δt дает периодический интерференционный сигнал.
Фазовый компаратор 13 определяет с помощью интерференционного сигнала степень изменения и поступательную скорость v устройства 1.
Полученную скорость можно использовать затем произвольным образом, например, для непосредственного отображения скорости на индикаторе или для вычислений в навигационной системе. Компоненты, необходимые для дальнейшей обработки полученной скорости, могут быть встроены в устройство 1 или внешне соединены с ним, например как часть другого устройства.
Если оба канала 11, 12 расположены без дополнительного учета, приблизительно параллельно друг другу, как показано, то вращательное движение устройства 1 вызывает изменение фазового сдвига, накладывающееся на описанное изменение фазового сдвига вследствие поступательного движения.
В этом случае предусмотрено вращательное измерительное устройство 14, которое регистрирует вращательное движение устройства 1. Вращательное измерительное устройство 14 может быть образовано, например, лазерным гироскопом. Вращательное измерительное устройство 14 подает сигнал к фазовому компаратору 13, который определяет по нему долю изменения фазового сдвига долей излучения по обоим каналам 11, 12 вследствие вращения устройства 1. Прежде чем фазовый компаратор 13 определит поступательную скорость устройства 1 на основе изменения фазового сдвига между долями излучения по обоим каналам 11, 12, он вычтет сначала из изменения долю, возникающую вследствие вращательного движения.
Такое отдельное вращательное измерительное устройство 14 не требуется, если каналы 11, 12 уже расположены так, что с самого начала предотвращается влияние вращательного движения на изменение фазового сдвига между долями излучения по каналам 11,12.
На фиг.2 схематично изображен второй пример выполнения устройства, согласно изобретению, в котором каналы выполнены также для компенсации влияния вращательных движений.
Устройство 2 содержит также источник 20 в месте излучения и фазовый компаратор 23 с детектором (не показан) в месте измерения. На прямой линии соединения между источником 20 и фазовым компаратором 23 расположены первый светоделитель 24 вблизи источника 20 и второй светоделитель 25 вблизи фазового компаратора 23. Далее расстояние между источником 20 и фазовым компаратором 23 ограничено вверх и вниз поверхностными отражателями 26, 27.
Если источник 20 создает излучение, то первая доля излучения распространяется вдоль прямой линии соединения к фазовому компаратору 23. Первый светоделитель 24 пропускает первую долю излучения без отклонения, а второй светоделитель 25 пропускает полную первую долю излучения.
С другой стороны, вторая доля созданного источником 20 излучения отклоняется вверх первым светоделителем 24. Эта вторая доля излучения попадает на верхний отражатель 26, отражается им, попадает на нижний отражатель 27, отклоняется им и т.д. Угол отклонения первым светоделителем 24 отрегулирован при этом так, что вторая доля излучения отражается, наконец, нижним отражателем 27 точно в направлении второго светоделителя 25. Второй светоделитель 25 отклоняет вторую долю излучения с возможностью ее подачи, как и первой доли излучения, к фазовому компаратору 23.
Из-за разной длины каналов 21, 22 долям излучения в этом устройстве 2 требуется тем самым также разное время, чтобы пройти образованный соответствующим каналом путь.
В месте измерения фазовый компаратор 23 оценивает возникающий из обеих долей излучения интерференционный сигнал. Если устройство находится в состоянии покоя, то из-за разных длин путей возникает определенный фазовый сдвиг между долями излучения. Если устройство движется с составляющей направления, соответствующей линии соединения между местом излучения и местом измерения, то этот фазовый сдвиг изменяется. Фазовый компаратор 23 определяет степень изменения и с ее помощью - поступательную скорость устройства.
Также в этом случае не требуется отдельной компенсации фазовых изменений вследствие возможных вращательных движений, поскольку такие фазовые изменения предотвращаются за счет симметричного распространения долей излучения между источником 20 и фазовым компаратором 23.
На фиг.3 схематично изображен третий пример выполнения устройства, согласно изобретению, у которого часть канала используется двояко.
В этом устройстве 3 источник 30 соединен с фазовым компаратором 33 по первому 31 и второму 32 каналам. Средняя часть первого канала 31 и средняя часть второго канала 32 реализованы общим отрезком 34, который расположен перпендикулярно линии соединения между источником 30 и фазовым компаратором 33 и используется для первого канала 31 и для второго канала 32 в противоположных направлениях.
Источник 30 создает в двух местах одинаковые по фазе излучения. Одно из излучений подают к первому каналу 31, а другое - ко второму каналу 32. На конце каналов 31, 32 излучения регистрируют и оценивают с помощью фазового компаратора 33, как в описанных со ссылкой на фиг.1, 2 устройствах 1, 2.
Оба канала 31, 32 могут быть при этом выполнены с возможностью предотвращения изменений фазового сдвига за счет вращательного движения устройства 3. В качестве альтернативы может осуществляться последующая компенсация таких изменений, как это описано со ссылкой на фиг.1.
На фиг.4 схематично изображен четвертый пример выполнения устройства, согласно изобретению, в котором общий отрезок реализован посредством складывания.
Устройство 4 содержит среду распространения, ограниченную двумя поверхностными отражателями 49, 50. В среде распространения по одной прямой параллельно двум отражателям 49, 50 расположены четыре отражателя 45, 46, 47, 48. Эта прямая соответствует также измерительной оси устройства 4. Устройство 4 содержит далее источник 40 света и два детектора 43, 44 над средой распространения. Детекторы 43,44 соединены далее с фазовым компаратором (не показан).
Первую долю созданного источником 40 света излучения посредством светоделителя 51 направляют по левому световоду 52 на средний правый отражатель 47, а вторую долю этого излучения по правому световоду 53 - на средний левый отражатель 46. Левый световод 52 и правый световод 53 пересекаются, следовательно, на пути от светоделителя 51 к соответствующему отражателю 47,46.
Средний правый отражатель 47 направляет идущую от светоделителя 51 долю излучения по прямой к внешнему правому отражателю 48. Внешний правый отражатель 48 отклоняет долю излучения со встречной составляющей направления к нижнему отражателю 50. Оттуда доля излучения отражается к верхнему отражателю 49, далее к нижнему отражателю 50 и снова к верхнему отражателю 49. Наконец долю излучения направляют от верхнего отражателя 49 к внешнему левому отражателю 45. Понятно, что число отражений между верхним 49 и нижним 50 отражателями произвольное, пока выше и ниже прямой возникают одинаковые доли излучения.
Внешний левый отражатель 45 отражает, наконец, долю излучения к среднему левому отражателю 46. Средний левый отражатель 46 отражает долю излучения в правый световод 53, через который доля излучения покидает среду распространения и подается к правому детектору 44.
Доля излучения, подаваемая светоделителем 51 к правому световоду 53, проходит посредством отражателей 45-50 путь, противоположный доле излучения, подаваемой к левому световоду 52. Эта доля излучения покидает среду распространения тогда по левому световоду 52, а затем подается к левому детектору 43.
Направленная в правый световод 53 доля излучения распространяется, таким образом, по первому каналу, а направленная в левый световод 52 доля излучения - по встречному второму каналу.
В этом устройстве 4 длина пути, следовательно, одинакова для обоих каналов, а применяемый материал также одинаковый. В состоянии покоя детекторы 43, 44 не регистрируют, следовательно, фазовый сдвиг между долей излучения по первому каналу и долей излучения по второму каналу.
Если же устройство 4 перемещают поступательно с составляющей направления в соответствии с ориентацией прямой, то доля излучения распространяется по одному из каналов большей частью в направлении движения, а доля излучения по другому каналу - большей частью против направления движения. Поступательное движение имеет, следовательно, противоположный знак для соответствующего главного направления обеих долей излучения. На основе этого возникает фазовый сдвиг между обеими долями излучения при поступательном движении.
Соответствующее фазовое положение регистрируют с помощью детекторов 43, 44 и направляют дальше к фазовому компаратору, который на основе этого определяет актуальную скорость в направлении прямой.
Источник 40 света, детекторы 43, 44 и светоделитель 51 устройства 4 могут быть размещены, например, на известном волоконном гироскопе.
Понятно, что скорость, определяемая также в устройствах 3, 4, может быть использована различным образом, как это упомянуто в отношении устройства 1.
На фиг.5 схематично изображен пример выполнения системы, согласно изобретению, которая обеспечивает измерение любых поступательных и вращательных скоростей.
Система 6 выполнена в форме куба. Каждая из шести сторон куба содержит одно из устройств на фиг.1-4. На трех видимых сторонах 60, 61, 62 куба показана измерительная ось 70, 71, 72 соответствующего устройства. Три скрытые стороны куба содержат по одному устройству с измерительной осью со встречной ориентацией по сравнению с измерительной осью 70, 71, 72 устройства на противоположной стороне 60, 61, 62 куба. Обрабатывающий блок оценивает зарегистрированную для шести направлений скорость системы 6 и определяет по ней общую скорость системы 6, включая поступательные и вращательные скорости, и направление или направления движения.
Представленный здесь способ и/или устройство для измерения векторов скорости (схематичное изображение функции на фиг.1; внимание: фиг.1 не изображает твердо установленную геометрию) основан на эффектах Физо, Саньяка и Доплера и отличается тем, что, по меньшей мере, одно место излучения (и/или несколько) имеется, по меньшей мере, на одном источнике (и/или нескольких), излучение которого распространяется, по меньшей мере, по двум каналам соответственно с известной скоростью и соответственно известной длиной волны (здесь имеется в виду универсальная физическая длина волны, присваиваемая каждому объекту) и подает оцениваемые интерференции, в частности, однако не обязательно, только на время соответственно необходимой продолжительности измерения, к одному или нескольким местам измерений, а также, по меньшей мере, к одному из каналов от выполненного таким образом места излучения (мест излучений) к выполненному таким образом месту измерения (местам измерений), что имеющееся на этом канале фазовое положение в результате поступательного события к фазовому положению соответственно другого канала. При этом каналы изображены так, что вращательное событие, термическое или другое поступательное влияние не дает сдвига фазовых положений между этими каналами, или эти совмещенные события и влияния корректированы лежащими за пределами каналов ( = внешними) устройствами. Сдвиг фазовых положений ( = измерительный сигнал), дающий интерференционный сигнал этих каналов, является тогда мерой скорости. Направление возникает как пространственное направление, для которого измерительный сигнал для данных каналов становится максимальным ( = канал наибольшей разности). В частности, задавая определенный вектор скорости, можно, таким образом, определить присущую устройству измерительную ось.
Описанные выше каналы необязательно должны быть однородными, а это значит, что они могут быть составлены также из соответственно нескольких также различных отрезков.
Названные эффекты и тем самым измерительный сигнал возникают тогда, когда по запланированным каналам распространения излучение может беспрепятственно распространяться; иначе говоря, излучение имеет необходимые степени свободы для своего распространения и тем самым необходимые степени свободы для возникновения эффектов. Наглядно и тем самым проще говоря, если, например, фотон существует в световоде исключительно в продольной моде, то он только в этой моде имеет степень свободы и только в этой степени свободы возникнут подтверждаемые эффекты. Следовательно, выбор предпочтительного направления измерения можно задавать за счет конструкции и физических свойств датчика, т.е. за счет установления степеней свободы распространения.
Иначе говоря, способ и/или устройство отличается тем, что источник изображают с местами излучения, которые имеют известное фазовое соотношение между местами излучения измерительного процесса, причем эти места излучения могут иметь пространственное и/или временное удаление друг от друга, и для которых каналы (=пути) имеют (максимально большой) сдвиг фазовых положений относительно поступательного движения.
Определяющим для принципиально возможного разрешения представленного здесь способа и/или устройства являются длина волны излучения и разность времени прохождения по путям. Второстепенными являются способности фазового компаратора, а также статические и систематические ошибки.
Для реализации существует разнообразие предпочтительных вариантов осуществления, из которых здесь правда выделены лишь немногие, поскольку они в пределах разнообразия представляют специальные случаи принципа, а другие варианты осуществления являются их модификациями.
В одном выполнении источник является источником света. В целом, лазер является произвольной конструкции: линейные и кольцевые лазеры (они могут быть использованы, конечно, и для угловых измерений), твердотельные, газовые, жидкостные лазеры - вот лишь родовые понятия. Экзотические физические эффекты, например квантовая флюоресценция, волновая флюоресценция и суперфлюоресценция и т.п., не следует, вероятно, перечислять по отдельности. Таким образом, в качестве известной скорости дана скорость света.
В другом выполнении источник является мазером.
В качестве решений для путей можно в других выполнениях привести, в частности, варианты с материалами, в которых скорости распространения различные, а также варианты длин путей (фиг.2) и комбинации обоих действий.
Для компенсации вращательных фазовых сдвигов снова существует несколько возможностей. Одной из них является геометрическое выполнение путей, для чего участки пути за пределами соединительной линии между началом и концом должны вести себя соответственно так, чтобы к каждой части на одной стороне была такая же по величине часть на противоположной стороне (фиг.2), а другой - вычислительная компенсация за счет определения вращения, например, посредством лазерного гироскопа и последующего вычитания.
Во всех вариантах выполнения излучение разделяют по путям и снова сводят вместе для интерферометрической оценки.
Воздействие на выполнение некоторых вариантов оказывает эффект запирания (проще говоря, фиксированность узла колебаний по месту повреждения). Эффект запирания в этих случаях необходим, по меньшей мере, для двух из трех пространственных измерений. Если он отсутствует для одного пространственного направления (например, лазерный гироскоп), то для получения полезного измерительного сигнала канал с наибольшей разностью должен иметь составляющую вектора перпендикулярно этому пространственному направлению. Причина этого в том, что в этом случае эффект Саньяка для движения в этом лишенном эффекта запирания пространственном измерении не играет никакой роли, а сдвиг фазы происходит за счет обусловленного сдвигом места излучения во взаимодействии с различным временем прохождения по отдельным каналам. Этот результат правда однозначно не объясняется этим лишенным эффекта запирания пространственным направлением, поскольку точно также фазовый сдвиг в этом устройстве происходит за счет составляющей скорости в направлении канала с наибольшей разностью, что обусловлено эффектом Саньяка (см. ниже). Возникает, таким образом, мера скорости в этой плоскости, образованной каналом и лишенным эффекта запирания пространственным направлением. Составляющая скорости перпендикулярно этой плоскости не дает сигнала. Если эту векторную меру скорости комбинировать с мерами аналогично полученным векторным мерам скорости линейно независимо от этой плоскости и одновременно линейно независимо от других плоскостей, то после простого векторного исчисления возникает мера скорости в пространстве. С другой стороны, в случае имеющегося для всех пространственных направлений эффекта запирания ограничение отсутствует, и эффект Саньяка дает сдвиг.
В случае если эффект запирания в этих вариантах выполнения имеется во всех пространственных направлениях, к обоим каналам (канал 1 пусть имеет время прохождения сигнала t1, а канал 2 - t2 и пусть t1>t2. Например, t1=a*t2) в момент t0 подается сигнал с идентичным фазовым положением. Если устройство не движется, то в месте измерения возникает интерференционный сигнал, образованный сигналами, переданными в моменты t1 и t0+(t1-t2). Если устройство движется со скоростью v=Δl/Δt, то с обоими каналами суммируется сдвиг за счет этого движения и соответствующий канал, т.е. соответствующее время прохождения становится тем самым длиннее (эффект Саньяка), а именно для канала 2 на Δt, а для канала 1 на a*Δt. Это значит, в конце канала 1 имеет место фаза, соответствующая фазовому положению канала с временем прохождения t1+a*Δt, а в конце канала 2, поскольку за счет эффекта запирания была захвачена первоначальная фаза, имеет место фаза, соответствующая фазовому положению t2+Δt. Это изменение разности фазовых положений - зависимость от скорости v на (а-1)*Δt дает периодический интерференционный сигнал.
В случае если эффект запирания в этих вариантах выполнения для одного пространственного направления отсутствует, то канал с наибольшей разностью должен иметь составляющую вектора перпендикулярно этому пространственному направлению. Для этой составляющей вектора при совершенно аналогичном рассмотрении, как и выше, возникает точно также изменение разности фаз на (а-1)*Δt.
Представленный здесь способ и/или устройство для измерения векторов скорости включает в себя в случае трехмерного измерения все скорости/векторы скоростей в сумме, например, начиная со скорости Млечного Пути в известной нам Вселенной через движение солнечной системы по отношению к центру Галактики, через движение земли в солнечной системе, через движение самой Земли, как и через движение земной коры, до собственного движения измеряемого объекта, как и собственной скорости самого устройства. Для определения соответственно рассматриваемой составляющей вектора другие следует, таким образом, вычесть.
Другой вариант выполнения использует в качестве источника, например, в частности, лазер, лазерный диод (следовательно, линейный газовый, жидкостный лазер или твердотельный лазер, как и кольцевой лазер). От места излучения света этого лазера ведет, например, расщепленный по короткому пути световод, одна ветвь которого после расщепления длиннее (в смысле вышеописанного), чем другая, и которые с целью образования интерференции снова сводят вместе. В его конце размещено тогда устройство для оценки интерференции (фазовый компаратор), например с фотодиодом в качестве датчика. Там фазовое положение переданного ранее (аккумулированного) света сравнивают с фазовым положением переданного позднее света. Световод прокладывают в соответствии с требованием (см. выше) к выбору пространственного направления или же используют физически аналогичную конструкцию с отражателями и со светоделителями, как показано на фиг.2. В частности, свет используемого здесь лазера можно использовать одновременно для всех посредством соответственно расположенных далее расщепленных волноводов для измерения других пространственных направлений.
Другой предпочтительный вариант выполнения использует, в принципе, конструкцию достаточно известных волоконных гироскопов. Основное отличие заключается здесь в выполнении сенсорной головки (=каналы). Она состоит здесь не из намотанного световодного волокна, а из сконструированных, согласно приведенным правилам, каналов. Принципиальная конструкция изображена на фиг.3 и 4. В частности, свет используемого здесь лазера можно использовать одновременно для всех посредством соответственно расположенных далее расщепленных волноводов для измерения других пространственных направлений. Вместо удлинения части пути посредством складывания (фиг.4) можно использовать также изменение скорости распространения в среде за счет использования материала с другим показателем преломления для «удлинения» пути. Это, конечно, также посредством и в комбинации обеих форм. Справедливо заметить что, чем больше разность, тем выше разрешение и тем восприимчивее форма выполнения.
Чтобы получить представление о величине измерительного эффекта, следует пояснить результирующий сдвиг с помощью типичной шаговой скорости 3,6 км/ч (3,6 км/ч=1 нм/нс). При взятом расстоянии между местами светового излучения 1 световая наносекунда (около 30 см) и длине волны света 400 нм это дает хорошо овладеваемую измерительную величину.
Потенциально возможная частота повторений измерений зависит, в основном, от времени прохождения излучения по более длинному пути, а также от последующей обработки сигнала и лежит в верхнем мегагерцевом диапазоне.
Поскольку представленный здесь способ и/или устройство является инерциальной работающей системой, отношение к другому подвижному объекту, например, изображено посредством простого контакта с ним. В остальном, прибор показывает вектор собственной скорости себя самого.
В другом предпочтительном варианте выполнения один канал используют, по меньшей мере, двояко за счет того, что излучение проходит по нему в обоих (встречных) направлениях (функционально-схематичное изображение на фиг.3). Преимуществом этого является экономия одного канала для направления измерения с целью минимизации деталей и уменьшения термических и других условий канала.
В другом предпочтительном варианте выполнения этот один канал заменен двумя отдельными каналами.
В другом предпочтительном варианте выполнения для полной регистрации движения - поступательного и вращательного - по меньшей мере, шесть из изображенных в соответствии с описанным способом устройств распределяют в пространстве с возможностью разложения измерительных сигналов, заданных посредством способа и/или устройства измерительных осей посредством выбранного подходящим образом математического правила вычислений однозначно на характеризующие движение пространственные векторы - поступательную и вращательную скорости. Разрешение вращательной скорости улучшают за счет увеличения расстояний между устройствами и тем самым измерительными осями. Примером расположения является размещение шести устройств на шести поверхностях куба.
В другом предпочтительном варианте выполнения, в котором нежелательна и/или не требуется полная регистрация движения, ненужные измерительные оси опускают и/или заменяют другими способами и/или устройствами.
В другом предпочтительном варианте выполнения способ и/или устройство дополняют одним или несколькими датчиками ускорения с тем, чтобы создать, таким образом, без наличия движения отношение к локальной нормали к силе тяжести.
В другом предпочтительном варианте выполнения способ и/или устройство дополняют одним или несколькими ватерпасами и т.п. с тем, чтобы создать, таким образом, без наличия движения отношение к локальной нормали к силе тяжести.
Областями применения является определение места и положения различных объектов и субъектов или их частей, из которых в качестве примера здесь перечислены лишь некоторые.
Пишущие приборы, например карандаш, шариковая ручка, компьютер, компьютерная мышь, велосипед, мотоцикл, автомобиль, специальные транспортные средства, такие как краны, мобильные мосты, строительные и грузоподъемные машины, железная дорога, скоростная железная дорога, вертолет, управляемый летательный аппарат, самолет, космический корабль, судно, подводная лодка, военные машины любого рода, пуля, граната, ракета, бытовые приборы, например пылесос, газонокосилка, домашний и промышленный роботы, промышленные механизмы, такие как валки, краны, вилочные погрузчики, транспортные поддоны, горные и туннелестроительные машины, такие как бур, фреза, морское применение, например стабилизация платформы, устройства для глубокого бурения, игрушки, такие как куклы, животные, автомобили, а также их компоненты и любой предмет, степени свободы движения которого должны быть зарегистрированы и/или отрегулированы.
Человек, а также части тела человека, например пальцы, руки, кисти, ноги, голова и туловище, а также внутренние органы или их части.
Животное, а также их части (см. человек).
Описанные варианты выполнения представляют только выбранные из множества различных возможных вариантов выполнения способа, согласно изобретению, и устройства, согласно изобретению.
Изобретение относится к измерительной технике и предназначено для измерения скорости поступательного и вращательного движений с помощью, по меньшей мере, шести устройств, расположенных в разных пространственных направлениях, каждое из которых содержит, по меньшей мере, два канала. По этим каналам (11, 12) направляют сигналы, а затем регистрируют их. Измерение фазового сдвига между сигналами по обоим каналам по сравнению со спокойным устройством (1) является для средств (13) оценки мерой актуальной скорости устройства (1). При этом предотвращают или компенсируют влияние вращательного движения на изменение фазового сдвига. Примером расположения устройств является их размещение на шести поверхностях куба. Изобретение обеспечивает надежное и независимое измерение скорости и может быть реализовано в наименьшем пространстве. 2 н. и 9 з.п. ф-лы, 5 ил.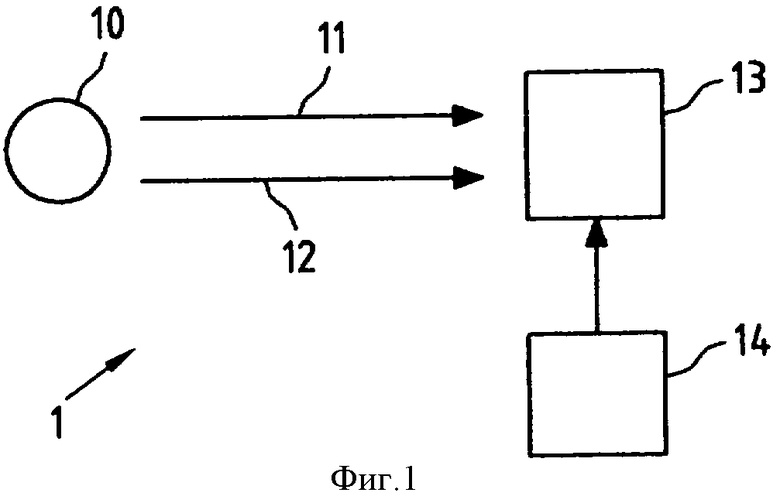
1. Система для измерения скорости, содержащая, по меньшей мере, один источник (10; 20; 30; 40) для создания, по меньшей мере, одного излучения, по меньшей мере, шесть устройств (1; 2; 3; 4) для измерения скорости, расположенных в системе (6) для измерения скорости, и для вращения системы (6) в разных пространственных направлениях (70, 71, 72), причем каждое из, по меньшей мере, шести устройств (1; 2; 3; 4) содержит, по меньшей мере, два канала (11, 12; 21, 22; 31, 32; 41, 42), по которым, по меньшей мере, одна доля, по меньшей мере, одного, созданного, по меньшей мере, одним источником (10; 20; 30; 40) излучения распространяется с соответственно известной длиной волны и соответственно известной скоростью распространения, причем каналы (11, 12; 21, 22; 31, 32; 41, 42) выполнены с возможностью обеспечения при поступательном движении соответствующего устройства (1; 2; 3; 4) фазового сдвига между долями излучения, распространяющимися, по меньшей мере, по двум каналам (11, 12; 21, 22; 31, 32; 41, 42) устройства (1; 2; 3; 4), и средства (13; 23; 33; 43, 44) оценки для регистрации долей излучения, покидающих соответственно, по меньшей мере, два канала (11, 12; 21, 22; 31, 32; 41,42) устройств (1; 2; 3; 4), и для определения скорости каждого из устройств (1; 2; 3; 4) соответственно, по меньшей мере, в одном пространственном направлении посредством оценки изменения фазового сдвига между зарегистрированными долями излучения по сравнению с фазовым сдвигом при спокойном устройстве (1; 2; 3; 4), причем система выполнена с возможностью предотвращения или компенсации изменения фазового сдвига зарегистрированных средствами (13; 23; 33; 43, 44) оценки для каждого из устройств (1; 2; 3; 4) долей излучения вследствие вращательного движения этого устройства (1; 2; 3; 4).
2. Система (6) по п.1, характеризующаяся тем, что, по меньшей мере, два канала (11, 12) соответствующего устройства (1; 2; 3; 4) имеют разные материалы или разные комбинации материалов.
3. Система (6) по п.1 или 2, характеризующаяся тем, что, по меньшей мере, два канала (21,22) соответствующего устройства (2) имеют разные геометрические длины.
4. Система (6) по п.1, характеризующаяся тем, что для предотвращения изменения фазового сдвига между зарегистрированными с помощью средств (23) оценки долями излучения вследствие вращательного движения устройства (2) каждый из, по меньшей мере, двух каналов (21, 22) устройства (2) имеет за пределами воображаемой прямой в направлении измерения устройства (2), в основном, одинаковые по величине участки на противоположных сторонах этой прямой.
5. Система (6) по п.1, характеризующаяся тем, что содержит детектирующие средства (14) для регистрации вращательного движения соответствующего устройства (1), причем средства (13) оценки выполнены с возможностью компенсации вызванного вращательным движением, по меньшей мере, по двум каналам (11, 12) соответствующего устройства (1) изменения фазового сдвига между зарегистрированными долями излучения с помощью информации от детектирующих средств (14),
6. Система (6) по п.1, характеризующаяся тем, что, по меньшей мере, два канала (31, 32; 41, 42) соответствующего устройства (1) имеют, по меньшей мере, один общий участок (34), проходимый подаваемыми, по меньшей мере, по двум каналам (31, 32; 41, 42) долями излучения в противоположном направлении.
7. Система (6) по п.6, характеризующаяся тем, что общий участок имеет отрезок, проходимый одной из долей излучения, в основном, в направлении измерения соответствующего устройства (4), и отрезок, проходимый этой долей излучения, в основном, в противоположном направлении, причем оба отрезка при спокойном устройстве (4) имеют разную физическую длину.
8. Система (6) по п.1, характеризующаяся тем, что содержит датчик ускорения, выполненный для создания отношения к локальной нормали к силе тяжести.
9. Система (6) по п.1, характеризующаяся тем, что, по меньшей мере, шесть устройств (1; 2; 3; 4) расположены на шести сторонах (61, 62, 63) куба, причем устройства (1; 2; 3; 4) на граничащих между собой сторонах (61, 62, 63) имеют ориентированные под прямым углом друг к другу измерительные оси (71, 72, 73) и устройства (1; 2; 3; 4) на противоположных друг другу сторонах имеют ориентированные навстречу друг другу измерительные оси.
10. Способ измерения скорости и вращения системы (6), характеризующийся тем, что для каждого из шести расположенных в разных пространственных направлениях устройств (1; 2; 3; 4) системы (6) создают, по меньшей мере, одно излучение, передачу соответственно, по меньшей мере, одной доли, по меньшей мере, одного излучения, по меньшей мере, по двум каналам (11, 12; 21, 22; 31, 32; 41, 42) соответственно с известной длиной волны и соответственно с известной скоростью распространения, причем путем поступательного движения устройств (1; 2; 3; 4) вызывают фазовый сдвиг между распространяющимися, по меньшей мере, по двум каналам (11, 12; 21, 22; 31, 32; 41, 42) долями излучения, регистрацию покидающих, по меньшей мере, два канала (11, 12; 21, 22; 31, 32; 41, 42) долей излучения и определяют скорости устройства (1; 2; 3; 4), по меньшей мере, в одном пространственном направлении посредством оценки изменения фазового сдвига между зарегистрированными долями излучения по сравнению с фазовым сдвигом при спокойном устройстве (1; 2; 3; 4), причем предотвращают или компенсируют изменение фазового сдвига долей излучения вследствие вращательного движения устройства (1; 2; 3; 4), и определяют скорость и вращения системы (6) по зарегистрированной скорости соответствующего устройства (1; 2; 3; 4).
11. Способ по п.10, характеризующийся тем, что, по меньшей мере, шесть устройств (1; 2; 3; 4) располагают на шести сторонах (61, 62, 63) куба, причем устройства (1; 2; 3; 4) на граничащих между собой сторонах (61, 62, 63) определяют скорость в перпендикулярных друг другу пространственных направлениях, а устройства (1; 2; 3; 4) на противоположных сторонах определяют скорость в противоположных друг другу пространственных направлениях.
| УСТРОЙСТВО ДЛЯ АНОДНО-МЕХАНИЧЕСКОЙ РЕЗКИ ИЗДЕЛИЙ БЕСКОНЕЧНОЙ ЛЕНТОЙ | 0 |
|
SU220378A1 |
| DE 3335708 A, 11.04.1985 | |||
| DE 10025395 C1, 17.01.1993 | |||
| Способ измерения угловой скорости с помощью волоконно-оптического гироскопа | 1990 |
|
SU1818527A1 |
| Способ измерения линейной скорости объекта и оптико-волоконный измеритель линейной скорости | 1982 |
|
SU1075814A1 |

