Предлагаемое устройство относится к транспортным средствам и может быть применено для обеспечения автоматического регулирования схождения управляемых колес в процессе движения.
Известно устройство для автоматического регулирования схождения управляемых колес в процессе движения, содержащее датчики боковой реакции дороги, действующей на управляемые колеса, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги (Патент РФ № 49257 МПК G01M 17/06, опубликован 10.11.2005 года), с помощью которого реализуется способ автоматической установки схождения управляемых колес в процессе движения заключающийся в том, что непрерывно измеряют и с помощью моста сравнивают между собой боковые силы, действующие на управляемые колеса, и дисбаланс моста, отражающий неправильность схождения управляемых колес, устраняют изменяя рабочую длину поперечной рулевой тяги реверсивным механизмом.
Недостатком известного устройства является то, что он не учитывает инерционность системы и при достижении момента устранения разности боковых сил на управляемых колесах (параллельности колес) они будут еще продолжать поворачиваться в сторону противоположного схождения, что снижает точность регулирования схождения управляемых колес в процессе движения, и это потребует нового процесса работы системы по устранению непараллельности, противоположного выполненному.
Недостатком устройства также является то, что сердечник электромагнитной катушки (привод золотника устройства распределения жидкости механизма изменения рабочей длины поперечной рулевой тяги) не фиксируется в среднем (нейтральном) положении.
Техническим результатом предлагаемого устройства является повышение точности регулирования схождения управляемых колес в процессе движения.
Указанный технический результат достигается тем, что устройство содержит две электромагнитные катушки, одну - для перемещения золотника распределительного устройства (для изменения рабочей длины поперечной рулевой тяги (гидроцилиндра)), а другую - для его возвращения в среднее (нейтральное) положение.
На чертеже показана схема устройства для автоматического регулирования схождения управляемых колес в процессе движения посредством двух катушек.
Предлагаемое устройство включает в себя рабочие колеса 1, установленные через подшипники 2 на осях 3, на которых также установлены втулки с тензодатчиками (электрическими датчиками боковой реакции дороги) 4. Оси 3 соединены поперечной рулевой тягой 5 переменной длины. Тензодатчики (датчики боковой реакции дороги) 4 на колесо 1 установлены на торцевых поверхностях втулок и имеют одинаковые электрические сопротивления, соединены по мостовой схеме 6. Точки А и В электрического моста 6 соединены с источником электропитания 7, а точки С и D - с электромагнитной катушкой 8, сердечник которой связан с золотником 9 распределительного устройства 10 потока рабочей жидкости. Устройство также содержит емкость 11, насос 12, реверсивный механизм изменения рабочей длины поперечной рулевой тяги (гидроцилиндр) 13 и усилитель 14 электрического сигнала. Тензодатчики (датчики боковой реакции дороги) 4, электрический мост 6, источник электропитания 7, электромагнитная катушка 8 распределительное устройство 10 потока рабочей жидкости и усилитель электрического сигнала 14 образуют систему управления реверсивным механизмом изменения рабочей длины поперечной рулевой тяги 13. Вторая катушка 15 обеспечивает возвращение золотника 9 распределительного устройства 10 потока рабочей жидкости в центральное (нейтральное) положение.
Принцип работы устройства следующий.
При прямолинейном движении автомобиля и оптимальном схождении колес боковые реакции дороги на управляемые колеса отсутствуют, а сопротивления датчиков равны между собой, поэтому напряжение между точками С и D электрического моста 6 равно нулю и золотник 9 распределительного устройства 10 находится в центральном (нейтральном) положении.
При отклонении схождения в ту или иную сторону управляемые колеса 1 за счет боковых реакций дороги будут воздействовать на втулки и, соответственно, на внутренние или наружные датчики 4 и изменять их электрическое сопротивление. При этом между точками С и D моста 6 возникает напряжение, которое, пройдя через усилитель 14, вызовет в электромагнитной катушке 8 магнитный поток. Сердечник электромагнитной катушки 8 переместит золотник 9 распределительного устройства 10 влево или вправо, обеспечивая подачу рабочей жидкости от насоса 12 в ту или иную полость гидроцилиндра 13 (реверсивного механизма), что вызовет изменение рабочей длины поперечной рулевой тяги 5, и обеспечивая, таким образом, требуемое схождение колес 1, причем напряжение, создающее электромагнитный поток в катушке 8, подается импульсно.
Золотник 9 распределительного устройства 10 после каждого включения возвращается в среднее (нейтральное) положение второй катушкой 15, которая включается в паузах между включениями первой катушки, причем чем больше дисбаланс моста, тем дольше включение и меньше пауза и чем больше скорость движения, тем меньше длительность включения и дольше пауза.
Таким образом, предлагаемое устройство для автоматического регулирования схождения управляемых колес в процессе движения повышает надежность регулировки с необходимой точностью параллельности плоскостей вращения управляемых колес при различных режимах движения (разгоне, накате, торможении), что способствует минимальному износу шин (обеспечивает сохранение колес), снижению сопротивления движению и расходу топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ УСТАНОВКИ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2007 |
|
RU2349892C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2005 |
|
RU2309867C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ УСТАНОВКИ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2006 |
|
RU2333470C2 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2007 |
|
RU2348914C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ДВИЖЕНИИ | 2007 |
|
RU2348913C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2392158C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2405708C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2007 |
|
RU2369857C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2398701C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2392157C1 |
Предлагаемое устройство относится к транспортным средствам и может быть применено для обеспечения автоматического регулирования схождения управляемых колес в процессе движения. Устройство содержит золотник распределительного устройства, обеспечивающий подачу рабочей жидкости от насоса в ту или иную полость гидроцилиндра, сердечник электромагнитной катушки для перемещения золотника распределительного устройства. Устройство дополнительно содержит вторую электромагнитную катушку для возвращения золотника распределительного устройства в среднее положение. Технический результат заключается в повышении точности регулирования схождения управляемых колес в процессе движения. 1 ил.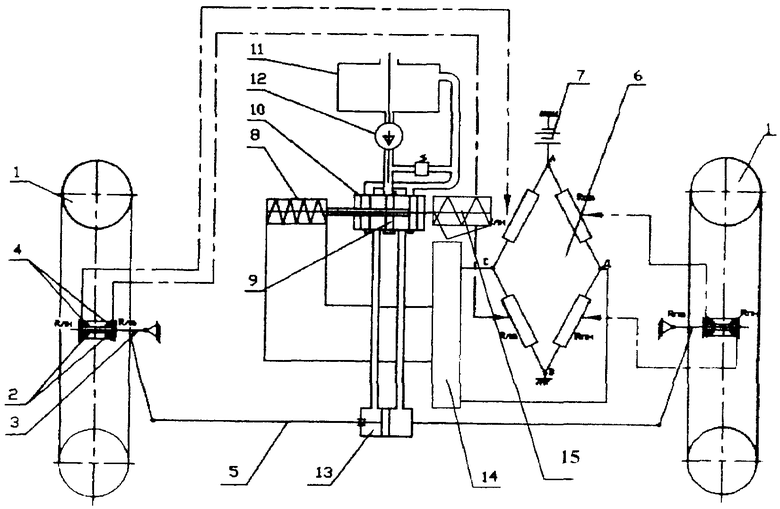
Устройство для автоматической установки схождения управляемых колес в процессе движения, содержащее золотник распределительного устройства, обеспечивающий подачу рабочей жидкости от насоса в ту или иную полость гидроцилиндра, сердечник электромагнитной катушки для перемещения золотника распределительного устройства, отличающееся тем, что дополнительно содержит вторую электромагнитную катушку для возвращения золотника распределительного устройства в среднее положение.
| Прибор для построения перспективных изображений | 1935 |
|
SU49257A1 |
| JP 62055205 A, 10.03.1987 | |||
| JP 6166317 A, 14.06.1994 | |||
| JP 4208676 A, 30.07.1992. | |||

