Предлагаемое устройство относится к транспортным средствам и может быть применено для обеспечения автоматического регулирования схождения управляемых колес в процессе движения, обеспечивая снижение сопротивления движению, минимальный износ шин и расход топлива.
Известно устройство для автоматического регулирования схождения управляемых колес транспортного средства, содержащее датчики боковых сил, действующих на управляемые колеса, реле, подвижный контакт которых связан с соответствующим датчиком боковых сил, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, связанными с неподвижными контактами реле (А.с. СССР №453604, G01М 17/06, 1974).
Недостатком данного устройства является ненадежность работы, вызванная наличием реле с подвижными и неподвижными контактами, которые могут срабатывать при колебаниях колес.
Наиболее близким к предлагаемому устройству является устройство для автоматического регулирования схождения управляемых колес в процессе движения, содержащее датчики боковой реакции дороги, действующей на управляемые колеса, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги (Патент РФ №49257, МПК G01М 17/06, опубликован 10.11.2005 года), характеризуемое тем, что в качестве датчиков боковой реакции дороги используют пьезодатчики в виде шайб, установленных на осях управляемых колес и электрически соединенных по мостовой схеме.
Устройство хорошо работает при значительном отклонении схождения управляемых колес, однако недостатками данного устройства являются низкая чувствительность, а также точность и надежность, т.к. датчики боковой реакции дороги реагируют также и на осевые силы, возникающие в обоймах конических подшипников колес от вертикальной нагрузки, а при малом отклонении в схождении управляемых колес и, следовательно, малом дисбалансе в мостовой схеме магнитный поток катушки недостаточен для перемещения сердечника и золотника распределительного устройства и при незначительном нарушении схождения управляемых колес, являющимся преимущественным в процессе движения, практически не устраняются, что приводит к сохранению повышенного износа шин и расхода топлива.
Техническим результатом предлагаемого устройства для автоматического регулирования схождения управляемых колес в процессе движения является повышение чувствительности, точности и надежности даже при малом дисбалансе в мостовой схеме.
Указанный технический результат достигается тем, что конические подшипники управляемых колес установлены на втулки с буртиками, которые посажены на осях управляемых колес, и тензодатчики укреплены на торцевых поверхностях буртиков втулок, а между диагональю моста и электромагнитной катушкой, сердечник которой связан с золотником распределительного устройства, установлен усилитель электрического сигнала.
Устройство для автоматического регулирования схождения управляемых колес в процессе движения показано на чертеже, на котором изображена общая схема предлагаемого устройства.
Предлагаемое устройство включает в себя управляемые колеса 1, установленные через подшипники, посаженные на втулки с буртиками 2 на осях 3. Тензодатчики (электрические датчики боковой реакции дороги) 4 укреплены на торцевых поверхностях буртиков втулок, имеют одинаковые электрические сопротивления и соединены по мостовой схеме 6. Точки А и В электрического моста 6 соединены с источником электропитания 7, а точки С и Д - с электромагнитной катушкой 8, сердечник которой жестко связан с золотником 9 распределительного устройства 10 потока рабочей жидкости. Устройство также содержит емкость 11, насос 12, реверсивный механизм изменения рабочей длины поперечной рулевой тяги (гидроцилиндр) 13 и усилитель электрического сигнала 14. Тензодатчики (датчики боковой реакции дороги) 4, электрический мост 6, источник электропитания 7, электромагнитная катушка, распределительное устройство 10 потока рабочей жидкости и усилитель электрического сигнала 14 образуют систему управления реверсивным механизмом изменения рабочей длины поперечной рулевой тяги 13.
Устройство работает следующим образом.
Электрическое сопротивление датчиков 4 боковой реакции дороги на колесо 1 изменяется под действием осевой силы в процессе движения.
При прямолинейном движении автомобиля и оптимальном схождении колес боковые реакции дороги на управляемые колеса отсутствуют, а сопротивления датчиков равны между собой, поэтому напряжение, подаваемое с точек С и Д электрического моста 6 на электромагнитную катушку 8, равно нулю и золотник 9 распределительного устройства 10 находится в центральном (нейтральном) положении.
При отклонении схождения в положительную или отрицательную сторону управляемые колеса 1 за счет боковых реакций дороги через втулки с буртиками 2 будут воздействовать на датчики 4 и изменять их электрическое сопротивление. При этом между точками С и Д моста 6 возникает напряжение, подаваемое на усилитель 14 и затем на электромагнитную катушку 8. Ток в катушке 8 вызовет магнитный поток, перемещающий сердечник катушки 8 и золотник 9 распределительного устройства 10 влево или вправо, обеспечивая подачу рабочей жидкости от насоса 12 в ту или иную полость гидроцилиндра 13 (реверсивного механизма изменения рабочей длины поперечной рулевой тяги 5), изменяя, таким образом, ее длину и обеспечивая требуемое схождение колес 1.
Таким образом, предлагаемое устройство для автоматического регулирования схождения управляемых колес в процессе движения позволяет обеспечить оптимальное схождение управляемых колес даже при незначительном дисбалансе на диагонали электрического моста, что повышает чувствительность, точность и надежность и обеспечивает параллельность плоскостей вращения колес при различных режимах движения (разгоне, накате, торможении), что способствует снижению сопротивления движению, износа шин и расхода топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2392158C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2007 |
|
RU2369857C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2008 |
|
RU2362702C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2008 |
|
RU2387566C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2398701C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2392157C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2007 |
|
RU2348914C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ДВИЖЕНИИ | 2007 |
|
RU2348913C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ УСТАНОВКИ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2007 |
|
RU2353912C2 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2405708C1 |
Изобретение относится к транспортным средствам и может быть применено для обеспечения автоматического регулирования схождения управляемых колес в процессе движения для обеспечения минимального износа шин этих колес, снижения сопротивления движению и расхода топлива. Устройство для автоматического регулирования схождения управляемых колес в процессе движения содержит датчики боковой реакции дороги, действующей на управляемые колеса, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги. Упомянутые датчики выполнены в виде тензодатчиков и электрически соединены по мостовой схеме. При этом конические подшипники управляемых колес установлены на втулки с буртиками, которые посажены на осях управляемых колес. Упомянутые датчики укреплены на торцевых поверхностях буртиков втулок. При этом между диагональю моста и электромагнитной катушкой, сердечник которой связан с золотником распределительного устройства, установлен усилитель электрического сигнала. Технический результат заключается в повышении чувствительности, точности и надежности работы. 1 ил.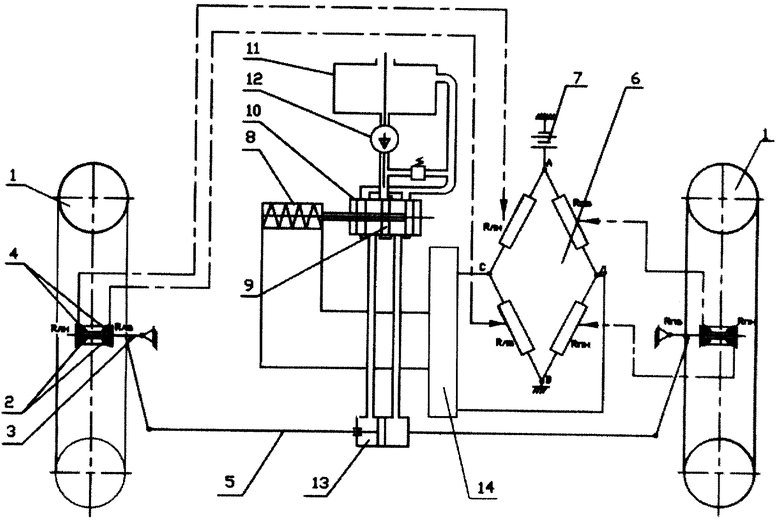
Устройство для автоматического регулирования схождения управляемых колес в процессе движения, содержащее датчики боковой реакции дороги, действующей на управляемые колеса, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги, причем датчики боковой реакции дороги электрически соединены по мостовой схеме, отличающееся тем, что конические подшипники управляемых колес установлены на втулки с буртиками, которые посажены на осях управляемых колес, и датчики выполнены в виде тензодатчиков и укреплены на торцевых поверхностях буртиков втулок, а между диагональю моста и электромагнитной катушкой, сердечник которой связан с золотником распределительного устройства, установлен усилитель электрического сигнала.
| Устройство для автоматического регулирования схождения управляемых колес транспортного средства | 1980 |
|
SU905692A1 |
| Устройство автоматического регулирования угла схождения управляемых колес транспортного средства | 1984 |
|
SU1207876A1 |
| JP 3279079 A, 10.12.1991 | |||
| JP 5065010 A, 19.03.1993 | |||
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2004 |
|
RU2259296C1 |
| Приспособление к цепному транспортеру для очистки транспортируемых им открытых ящиков | 1958 |
|
SU117841A1 |

