Предлагаемое устройство относится к транспортным средствам и может быть применено для обеспечения автоматического регулирования схождения управляемых колес автомобиля в процессе движения.
Известно устройство для автоматического регулирования схождения управляемых колес в процессе движения, содержащее датчики боковой реакции дороги, действующей на управляемые колеса, представляющие собой пьезодатчики в виде шайб, установленных на осях управляемых колес и электрически соединенных по мостовой схеме, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги (Патент РФ №49257, 10.11.2005, Бюл. №31).
Недостатком данного устройства являются низкие чувствительность, точность и надежность, т.к. датчики боковой реакции дороги реагируют также и на осевые силы, возникающие в обоймах конических подшипников колес от вертикальных нагрузок.
Наиболее близким к предлагаемому устройству является устройство для автоматического регулирования схождения управляемых колес в процессе движения, содержащее датчики боковой реакции дороги, представляющие собой тензодатчики, установленные на торцевых поверхностях буртиков втулок, посаженных на осях поворотных цапф, на которых установлены подшипники управляемых колес, и электрически соединенные по мостовой схеме, усилитель электрического сигнала, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги (Патент РФ №2309867, 10.11.2007, бюл. №31).
Недостатком данного устройства являются недостаточные чувствительность и точность вследствие незначительных деформаций внутренних буртиков втулок под действием боковых реакций дороги из-за значительно больших геометрических размеров этих буртиков.
Техническим результатом предлагаемого устройства для непрерывного автоматического регулирования схождения управляемых колес автомобиля в движении является повышение чувствительности и точности.
Указанный технический результат достигается тем, что в устройстве для непрерывного автоматического регулирования схождения управляемых колес автомобиля в движении, содержащем управляемые колеса с подшипниками, втулки с буртиками, тензодатчики, соединенные в электрический мост, являющиеся датчиками боковой реакции дороги, оси, источник электропитания, усилитель электрического сигнала, электромагнитную катушку, распределительное устройство, емкость с рабочей жидкостью, насос, поперечную тягу с реверсивным механизмом, внутренние буртики втулок по наружным концам изнутри выполнены скошенными и наружные торцевые поверхности внутренних концов этих буртиков отделены от буртиков внутренних обойм внутренних подшипников ступицы колеса радиальной кольцевой канавкой, что повышает чувствительность конструкции и точность.
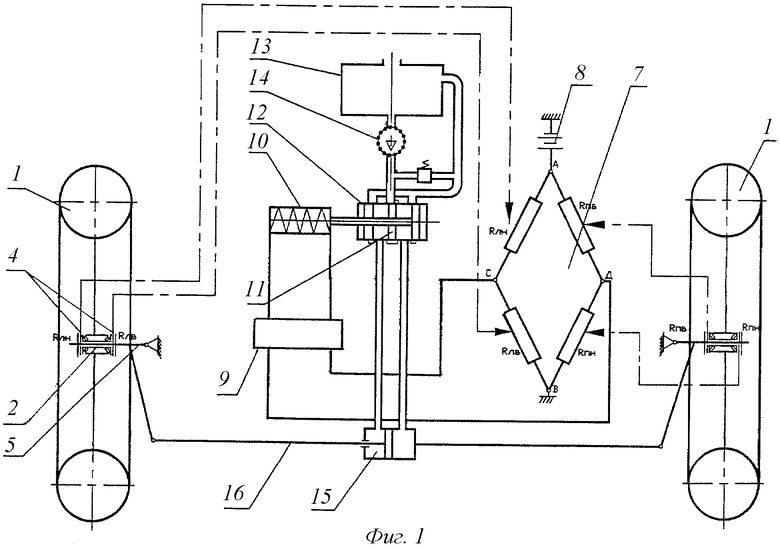
На фиг.1 изображена общая схема предлагаемого устройства; на фиг.2 - ось управляемого колеса в сборе (на виде сверху ось колеса, подшипники, гайка с шайбой не показаны).
Предлагаемое устройство включает в себя управляемые колеса 1, установленные через подшипники, посаженные на втулки 2 с буртиками 3 (внутренние буртики имеют по наружным концам изнутри скосы 4), на осях 5. Тензодатчики 6 (электрические датчики боковой реакции дороги) закреплены на торцевых поверхностях буртиков втулок, имеют одинаковые электрические сопротивления и соединены по мостовой схеме 7. Точки А и В электрического моста 7 соединены с источником электропитания 8, а точки С и Д - через усилитель электрического сигнала 9, с электромагнитной катушкой 10, сердечник которой жестко связан с золотником 11 распределительного устройства 12 потока рабочей жидкости. Устройство также содержит емкость 13, насос 14 и реверсный механизм изменения рабочей длины поперечной рулевой тяги (гидроцилиндр) 15. Тензодатчики 6, электрический мост 7, источник электропитания 8, усилитель электрического сигнала 9, электромагнитная катушка 10 и распределительное устройство 11 образуют систему управления реверсивным механизмом 14 изменения рабочей длины поперечной рулевой тяги 16.
Зазор в подшипниках (внутренние обоймы 17, ролики 18, наружные обоймы не показаны) управляемых колес регулируется гайкой 19 с шайбой. Втулка 2 закрепляется на оси 5 управляемых колес гайкой 20 с шайбой. Буртики внутренних обойм внутренних подшипников ступицы колеса отделены от наружных торцевых поверхностей внутренних концов буртиков радиальной кольцевой канавкой 21.
Устройство работает следующим образом.
При прямолинейном движении автомобиля и правильном схождении управляемых колес боковые реакции дороги на эти колеса отсутствуют, а сопротивления тензодатчиков равны между собой, поэтому напряжение, подаваемое с точек С и Д электрического моста 7 через усилитель электрического сигнала 9 на электромагнитную катушку 10, равно нулю и золотник 11 распределительного устройства 12 находится в центральном (нейтральном) положении.
При отклонении схождения в положительную или отрицательную стороны управляемые колеса 1 за счет боковых реакций дороги через втулки 2 с буртиками 3 будут воздействовать на тензодатчики 6 и изменять их электрическое сопротивление. При этом между точками С и Д моста 7 возникает напряжение, подаваемое через усилитель электрического сигнала 9 на электромагнитную катушку 10. Ток в катушке 10 вызовет магнитный поток, перемещающий сердечник катушки 10 и золотник 11 распределительного устройства 12 влево или вправо, обеспечивая подачу рабочей жидкости от насоса 14 в ту или иную полость гидроцилиндра 15 (реверсивного механизма изменения рабочей длины поперечной рулевой тяги 16), изменяя, таким образом, ее длину и обеспечивая требуемое схождение колес 1.
Таким образом, предлагаемое устройство для непрерывного автоматического регулирования схождения управляемых колес автомобиля в движении повышает чувствительность и точность, обеспечивает правильное положение управляемых колес при различных режимах движения (разгон, накат, торможение), что способствует снижению сопротивления движению, износа шин и расхода топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2398702C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2008 |
|
RU2387566C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2007 |
|
RU2369857C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ПРОЦЕССЕ ДВИЖЕНИЯ | 2009 |
|
RU2405706C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ПРОЦЕССЕ ДВИЖЕНИЯ | 2009 |
|
RU2405707C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2008 |
|
RU2362702C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2398701C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2392157C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2405704C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ В ДВИЖЕНИИ | 2009 |
|
RU2405705C1 |
Изобретение относится к транспортным средствам и может быть применено для обеспечения непрерывного автоматического регулирования схождения управляемых колес автомобиля в движении. Устройство содержит управляемые колеса с подшипниками, втулки с буртиками, тензодатчики, оси, источник электропитания, электромагнитную катушку, распределительное устройство, емкость с рабочей жидкостью, насос и поперечную тягу с реверсивным механизмом. Тензодатчики, закрепленные на торцевых поверхностях втулок, являются датчиками боковой реакции дороги и соединены по мостовой схеме с источником электропитания и электромагнитной катушкой. Сердечник электромагнитной катушки связан с золотником распределительного устройства потока рабочей жидкости, сообщенного с емкостью для рабочей жидкости, насосом и гидроцилиндром реверсивного механизма изменения рабочей длины поперечной рулевой тяги. Внутренние буртики втулок по наружным концам изнутри выполнены скошенными, и наружные торцевые поверхности внутренних концов этих буртиков отделены от буртиков внутренних обойм внутренних подшипников ступицы колеса радиальной кольцевой канавкой. Достигается повышение надежности, чувствительности и точности непрерывного автоматического регулирования схождения управляемых колес автомобиля в движении. 2 ил.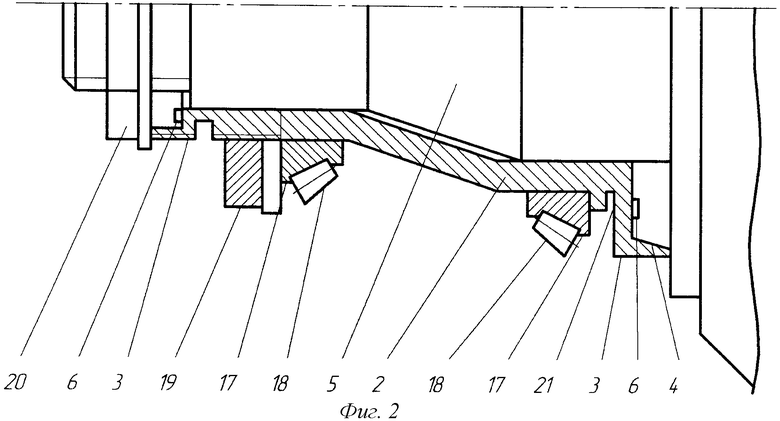
Устройство для непрерывного автоматического регулирования схождения управляемых колес автомобиля в движении, содержащее управляемые колеса, установленные через подшипники, посаженные на втулки с буртиками, на осях, тензодатчики, закрепленные на торцевых поверхностях буртиков втулок, являющиеся датчиками боковой реакции дороги и соединенные по мостовой схеме с источником электропитания и через усилитель электрического сигнала с электромагнитной катушкой, сердечник которой связан с золотником распределительного устройства потока рабочей жидкости, сообщенного с емкостью для рабочей жидкости, насосом и гидроцилиндром реверсивного механизма изменения рабочей длины поперечной рулевой тяги, отличающееся тем, что внутренние буртики втулок по наружным концам изнутри выполнены скошенными и наружные торцевые поверхности внутренних концов этих буртиков отделены от буртиков внутренних обойм внутренних подшипников ступицы колеса радиальной кольцевой канавкой.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2005 |
|
RU2309867C2 |
| US 4795187 А, 03.01.1989 | |||
| US 4493493 А, 15.01.1985 | |||
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2003 |
|
RU2292286C2 |
| US 4716982 А, 05.01.1988. | |||

