ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системам связи, а более точно, настоящее изобретение направлено на способы и устройство для определения эксплуатационной готовности несущих, выбора несущих и/или определения, когда инициировать эстафетную передачу обслуживания с одной ассоциативно связанной точки сетевого присоединения, например, ассоциативно связанной с одной несущей, на другую точку сетевого присоединения, например, ассоциативно связанную с другой несущей.
УРОВЕНЬ ТЕХНИКИ
С ракурса реализации, может быть полезным использовать разные несущие в разных частях системы связи, например, потому, что права на разные частоты находятся в собственности в разных географических местоположениях и/или потому, что желательно минимизировать сигнальные помехи посредством использования разных несущих. Системы беспроводной связи с расширенным спектром могут использовать разные несущие по всей системе, причем каждая несущая является ассоциативно связанной с разной полосой частот. В некоторых системах беспроводной связи, разные соты и/или секторы используют разные несущие. В некоторых системах один и тот же сектор или одна и та же сота использует разные несущие, каждая с ассоциативно связанной полосой частот, например, где полная имеющаяся в распоряжении полоса пропускания в соте или секторе разделена на разные полосы частот, например, отдельные полосы частот.
Беспроводные терминалы (WT), например, мобильные узлы, могут перемещаться по всей системе связи и устанавливать соединение с заданной базовой станцией сектора/соты с использованием конкретной частоты несущей и ассоциативно связанной полосы, например, для сигнализации нисходящей линии связи. В то время, как условия меняются, например, вследствие изменения условий загрузки, например, большего количества пользователей на частоте несущей, вследствие изменений в уровнях помех, или вследствие перемещения WT, например, подхода к границе соты/сектора, для WT может быть полезным или необходимым перейти на другую несущую и присоединиться к другой комбинации соты/сектора/частоты несущей, соответствующей передатчику базовой станции. Типично в известных системах многие реализации приемников беспроводных терминалов используют одиночные тракты приемника, а беспроводный терминал остается на той же самой частоте до тех пор, пока не вынужден переключиться, например, из-за обрыва в связи с базовой станцией. Этот подход нежелателен, так как WT испытывает перерывы в связи на границах и испытывает изменения в качестве приема, например, замирание, в то время как WT перемещается по всей системе. Другие известные реализации приемников используют одиночный тракт приемника, где приемник прерывает связь со связанным передатчиком базовой станции и временно переключается с несущей в употреблении, чтобы отыскать и оценить альтернативные потенциальные несущие. Этот подход нежелателен, так как WT разрывает нормальный сеанс связи во время поисковых интервалов, затрачивает время, перенастраивая фильтр, например (радиочастотный, RF) РЧ-фильтр, чтобы настроиться на каждую частоту поиска, затрачивает время на ожидание детектированной несущей, накопления и оценки любых принятых сигналов, например, контрольных сигналов, а затем затрачивает время, чтобы повторно настроиться на исходную настройку несущей.
В свете вышеприведенного обсуждения, очевидно, что есть потребность в улучшенных способах и устройстве, направленных на эффективную конструкцию и работу приемника беспроводного терминала. Могло бы быть полезным, если бы такие устройство и способы предусматривали оценку качества двух альтернативных каналов с использованием разных полос частот несущей и в один и тот же момент времени, не разрывая действующий сеанс связи. Также могло бы быть полезным, если бы такие способы предусматривали непрерывное отслеживание точки присоединения базовой станции частоты/соты/сектора, предоставляя возможность для переключения до срывов в связи, предоставляя возможность для переключения, происходящего в удобный момент, и предоставляя возможность переключения в ответ на другие соображения, например, условия загрузки системы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на способы и устройство для определения эксплуатационной готовности несущих, выбора несущих и/или определения, когда инициировать эстафетную передачу обслуживания с одной ассоциативно связанной точки сетевого присоединения, например, ассоциативно связанной с одной несущей, на другую точку сетевого присоединения, например, ассоциативно связанную с другой несущей. Каждая несущая соответствует конкретной частоте несущей и точке сетевого присоединения базовой станции, которая может использоваться беспроводным терминалом для присоединения к сети связи через канал беспроводной связи. Точка присоединения может быть, например, базовой станцией, сектором базовой станции или модулем связи в пределах сектора базовой станции, например, в случаях, где многочисленные несущие используются в секторе, который используется для формирования и/или обработки сигналов, соответствующих конкретной частоте несущей, используемой точкой сетевого присоединения.
Способы и устройство по настоящему изобретению могут использоваться в системе беспроводной связи, например, системах OFDM (мультиплексирования с ортогональным частотным разделением каналов) и/или CDMA (множественного доступа с кодовым разделением каналов), использующих многочисленные несущие в системе, например, где полная имеющаяся в распоряжении полоса пропускания разделена на разные полосы частот, каждая полоса с ассоциативно связанной частотой несущей. Разные соты в системе могут использовать разные частоты несущих; разные секторы одной и той же соты могут использовать разные частоты несущих. В некоторых вариантах осуществления один и тот же сектор соты может использовать разные частоты несущих, например, на разных уровнях мощности, обеспечивая дополнительное разнесение и дополнительные альтернативные варианты соединения базовой станции, например альтернативные точки присоединения для передачи сигналов канала потока обмена нисходящей линии связи.
Изобретение предоставляет приемнику беспроводного терминала возможность оставаться на его текущей рабочей полосе частот несущей и, тем не менее, принимать информацию с передатчиков базовых станций смежного сектора и/или соты, которая может использоваться для идентификации несущей, используемой соседним сектором или сотой, и определять, когда должно производиться переключение на другую несущую.
В системе, использующей изобретение, передатчики базовой станции в разных секторах и/или сотах периодически передают сигнал высокой мощности, иногда называемый маяковым сигналом, в полосе частот, используемой в соседнем секторе или соте. Маяковыми сигналами являются сигналы, которые включают в себя один или более узкополосных (в показателях частоты) компонентов сигнала, например, тонов сигнала, которые передаются на относительно высокой мощности по сравнению с другими сигналами, такими как сигналы пользовательских данных. В некоторых вариантах осуществления каждый из маяковых сигналов включает в себя один или более компонентов сигнала, где каждый компонент сигнала соответствует разному тону. Компонент маякового сигнала в некоторых вариантах осуществления включает в себя потоновую энергию сигнала, которая является 10, 20, 30 и более раз взятой средней потоновой энергией сигнала тонов сигнала, используемых для передачи пользовательских данных и/или немаяковых управляющих сигналов.
Многочисленные маяковые сигналы, например, многочисленные тоны высокой мощности, могут передаваться одновременно, хотя во многих вариантах осуществления самое большее один маяковый сигнал передается передатчиком в любом заданном периоде времени передачи, например, периоде передачи символа. Одиночный маяковый сигнал может включать в себя одиночный тон сигнала высокой мощности или, в некоторых вариантах осуществлениях, несколько тонов высокой мощности.
Каждый компонент маякового сигнала передается, например, на предопределенной частоте, тем самым предоставляя частоте компонентов маякового сигнала возможность использоваться при передаче информации, например, информации о соте, секторе и/или несущей. В некоторых вариантах осуществления маяковый сигнал соответствует одиночному тону. Компоненты маякового сигнала могут быть постоянными в показателях частоты, либо они могут передаваться в разные моменты во времени на разных частотах, например, согласно предопределенной схеме, такой как конкретная последовательность скачкообразной перестройки частоты, соответствующая соте или сектору.
В соответствии с настоящим изобретением беспроводные терминалы, например, мобильные узлы, детектируют компоненты маякового сигнала, передаваемые разными сетевыми точками присоединения в полосе частот, являющейся используемой, например, отслеживаемой, мобильным узлом. Относительно высокий уровень мощности компонентов маякового сигнала обеспечивает им легкость в детектировании с использованием способов детектирования энергии, которые не требуют синхронизации временных характеристик символов с передающей базовой станцией. Частота детектированных компонентов маякового сигнала, которая является частотой самого маякового сигнала в случае маякового сигнала c одним тоном, затем определяется беспроводным терминалом, например, посредством определения частоты, на которой сконцентрирована энергия детектируемого компонента маякового сигнала. Детектирование частоты компонента маякового сигнала может и, часто, во многих случаях происходит, до того, как беспроводный терминал определил частоту несущей или временные характеристики символа, имеющие отношение к соте или сектору, передающим маяковый сигнал. Частоты компонентов принятого маякового сигнала могут, а в различных вариантах осуществления используются для определения сектора или соты, из которых детектированные компоненты маякового сигнала передавались, и/или частоты несущей, ассоциативно связанной с передающим сектором или сотой. Посредством сохранения информации об интенсивности сигнала принятого компонента маякового сигнала, например, мощности, и сравнения интенсивности компонентов маяковых сигналов, соответствующих разным сетевым точкам присоединения, мобильное устройство может выбирать частоту несущей, которая должна использоваться, и/или определять, когда должна быть выполнена эстафетная передача обслуживания. Текущая частота, на которую должна производиться эстафетная передача обслуживания, может быть определена по частоте (иногда рассматриваемой в сочетании с другой информацией) компонента принятого маякового сигнала, который инициировал операцию эстафетной передачи обслуживания. Во многих случаях частота несущей соседнего сектора или соты определяется по сохраненной информации, указывающей частоту несущей, используемую разными секторами и/или сотами для передачи маяковых сигналов.
Информация, получаемая по компонентам маяковых сигналов, передаваемых соседними секторами или сотами в полосе частот смежного сектора или соты, предоставляет беспроводным терминалам в смежном секторе или соте возможность идентифицировать, когда приближается граничная область, когда беспроводный терминал должен выполнять эстафетную передачу обслуживания и какая новая частота несущей должна использоваться после эстафетной передачи обслуживания. Это может достигаться без принуждения беспроводного терминала переключать его приемник на другую полосу частот при попытке идентифицировать несущую соседнего сектора и/или соты.
В одном конкретном примерном варианте осуществления многочисленные полосы частот используются в системе связи, где каждая полоса частот использует разную частоту несущей. Беспроводный терминал, например, мобильный узел, за раз прослушивает одну полосу частот, например, полосу частот, соответствующую несущей, которую мобильное устройство использует для приема и/или передачи пользовательских данных, таких как голос, текст, видео или другие прикладные данные. В то время как беспроводный терминал принимает сигналы, в этом конкретном примерном варианте осуществления он выполняет операцию преобразования из временной в частотную область, например, посредством выполнения операции преобразования Фурье над принятым сигналом, такой как БПФ (быстрое преобразование Фурье, FFT) или ДПФ (дискретное преобразование Фурье, DFT). Результирующая операция времячастотного преобразования формирует множество компонентов сигнала, например, тонов сигнала, соответствующих разным частотам полосы сигнала, являющейся отслеживаемой. Детектирование энергии выполняется над разными компонентами сигнала, чтобы сформировать оценку энергии каждого компонента сигнала, например, формируется оценка энергии в каждом или множестве разных тонов сигнала, присутствующих в принятом сигнале. На основании энергии компонента сигнала выполняется определение в отношении того, соответствует ли компонент сигнала принятому маяковому сигналу. Этот этап определения маякового сигнала может быть реализован посредством сравнения энергии компонента сигнала с пороговым уровнем энергии, который, когда превышен, указывает наличие маякового сигнала. Когда детектирован компонент сигнала, соответствующий маяковому сигналу, частота компонента сигнала и, соответственно, частота детектированного маякового сигнала используется затем для определения информации о соте, секторе и/или несущей, соответствующей передатчику базовой станции, который передавал маяковый сигнал, который детектировался. В различных вариантах осуществления детектированная энергия компонентов маяковых сигналов, соответствующих маяковым сигналам, принятым с разных передатчиков, сравнивается. Выбор несущей и решения эстафетной передачи обслуживания основаны на результате сравнений интенсивности, например, энергии, маякового сигнала. Решение реализовать эстафетную передачу обслуживания с точки присоединения, соответствующей первому принятому маяковому сигналу, и на другую точку присоединения, соответствующую другому маяковому сигналу, может быть основано на многообразии факторов, в дополнение к относительной интенсивности маякового сигнала, в том числе, например, изменениях в относительной интенсивности маякового сигнала со временем, текущей интенсивности маякового сигнала, падающей ниже предопределенного порогового значения или превышающей предопределенное пороговое значение, и/или интенсивности маякового сигнала, соответствующей конкретному передатчику, остающейся выше предопределенного порогового уровня в течение периода времени.
Вышеприведенный примерный вариант осуществления подразумевается иллюстративным. Некоторые реализации, использующие в своих интересах настоящее изобретение, будут выполнять все, большинство или многие из вышеописанных этапов. Однако должно быть отмечено, что другие реализации будут использовать в сочетании лишь немногие вышеописанные этапы, по-прежнему наряду с достижением полезных результатов по настоящему изобретению.
Многочисленные дополнительные признаки, преимущества и варианты осуществления настоящего изобретения обсуждены ниже в подробном описании.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - изображение примерной системы беспроводной связи, поддерживающей многочисленные несущие, реализованной в соответствии с изобретением и использующей способы по настоящему изобретению.
Фиг.2 - изображение примерной базовой станции, реализованной в соответствии с настоящим изобретением и использующей способы по настоящему изобретению.
Фиг.3 - изображение примерного беспроводного терминала, реализованного в соответствии с настоящим изобретением и использующего способы по настоящему изобретению.
Фиг.4 - изображение примерного варианта осуществления приемника, который может одновременно обрабатывать два компонента принятого сигнала из одной и той же выбранной полосы несущей, каждый компонент передает разную информацию, например, информацию, соответствующую одной из двух разных полос несущей, приемник реализован в соответствии с настоящим изобретением и использует способы по настоящему изобретению.
Фиг.5 - чертеж, иллюстрирующий примерную сигнализацию базовой станции, ассоциативно связанную с примерным вариантом осуществления беспроводного терминала, использующего примерный вариант осуществления приемника с одиночным каскадом приемника по фиг.4, в соответствии с изобретением.
Фиг.6 - блок-схема последовательности операций способа, иллюстрирующая примерный способ управления системой связи, включающей в себя примерный беспроводный терминал, использующий примерный приемник с одиночным каскадом приемника по фиг.4, в соответствии с настоящим изобретением.
Фиг.7 - изображение части примерных систем беспроводной связи, реализованных в соответствии с изобретением, система включает в себя примерный беспроводный терминал в движении и используется в целях дополнительного разъяснения изобретения.
Фиг.8 - изображение еще одного примерного варианта осуществления приемника, реализованного в соответствии с настоящим изобретением, приемник может использоваться в беспроводном терминале, изображенном на фиг.7.
Фиг.9 - чертеж, иллюстрирующий примерную сигнализацию передатчика сектора базовой станции, в том числе маяковые сигналы, соответствующие передатчику сектора, маяковые сигналы являются передаваемыми в многочисленных полосах, в соответствии с настоящим изобретением; сигнализация может передаваться с примерной базовой станции, показанной на фиг.7.
Фиг.10 - чертеж, иллюстрирующий примерный принимаемый сигнал на приемнике примерного беспроводного терминала, показанного на фиг.7.
Фиг.11 - изображение, иллюстрирующее примерную обработку приемника беспроводного терминала примерного принимаемого сигнала по фиг.10 и примерного выбора полосы в соответствии с настоящим изобретением.
Фиг.12 - чертеж, иллюстрирующий примерную сигнализацию передатчика сектора базовой станции, в том числе маяковые сигналы, соответствующие передатчику сектора, маяковые сигналы являются передаваемыми в многочисленных полосах в соответствии с настоящим изобретением, сигнализация может передаваться с примерной базовой станции, показанной на фиг.7, после того, как беспроводный терминал выбрал новую полосу и поменял точку присоединения.
Фиг.13 - иллюстрация примерного маякового сигнала со смещением временных характеристик относительно смежного сектора, используемая в целях дополнительного разъяснения признаков изобретения.
Фиг.14 - иллюстрация беспроводного терминала и различных элементов, включенных в беспроводный терминал, имеющих отношение к определению эксплуатационной готовности несущей, которая может использоваться для определения, когда инициировать эстафетную передачу обслуживания с одной частоты несущей на другую.
Фиг.15 - иллюстрация примерного модуля обработки принятого беспроводным терминалом сигнала, реализованного в соответствии с настоящим изобретением, который может использоваться в беспроводном терминале по фиг.14.
Фиг.16 - блок-схема последовательности операций способа примерного способа управления WT в системе связи OFDM в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг.1 показывает примерную систему 100 беспроводной связи, поддерживающую сигнализацию многочисленных несущих и расширенного спектра, реализованную в соответствии с настоящим изобретением. Система 100 использует устройство и способы по настоящему изобретению. Фиг.1 включает в себя множество примерных многосекторных сот, соту 1 102, соту 2 104, соту 3 106. Каждая сота (102, 104, 106) представляет зону беспроводного обслуживания для базовой станции (BS), (BS 1 108, BS 2 110, BS 3 112) соответственно. В примерном варианте осуществления каждая сота 102, 104, 106 включает в себя три соты (A, B, C). Сота 1 102 включает в себя сектор A 114, сектор B 116 и сектор C 118. Сота 2 104 включает в себя сектор A 120, сектор B 122 и сектор C 124. Сота 3 106 включает в себя сектор A 126, сектор B 128 и сектор C 130. В других вариантах осуществления, возможны разные количества секторов на соту, например, 1 сектор на соту, 2 сектора на соту или более чем 3 сектора на соту. В дополнение, разные соты могут включать в себя разные количества секторов.
Беспроводные терминалы (WT), например, мобильные узлы (MN), могут перемещаться по всей системе и связываться с равноправными узлами, например, другими MN, через беспроводные линии связи на BS. В секторе A 114 соты 1 102, WT (132, 134) присоединены к BS 1 108, соответственно, через беспроводные линии (133, 135) связи. В секторе В 116 соты 1 102, WT (136, 138) присоединены к BS 1 108, соответственно, через беспроводные линии (137, 139) связи. В секторе С 118 соты 1 102, WT (140, 142) присоединены к BS 1 108, соответственно, через беспроводные линии (141, 143) связи. В секторе A 120 соты 2 104, WT (144, 146) присоединены к BS 2 110, соответственно, через беспроводные линии (145, 147) связи. В секторе В 122 соты 2 104, WT (148, 150) присоединены к BS 2 110, соответственно, через беспроводные линии (149, 151) связи. В секторе В 124 соты 2 104, WT (152, 154) присоединены к BS 2 110, соответственно, через беспроводные линии (153, 155) связи.
BS могут быть соединены через сеть, соответственно, предусматривая возможность соединения WT в пределах заданной соты с равноправными участниками, расположенными вне заданной соты. В системе 100, BS (108, 110, 112) присоединены к сетевому узлу 168 через сетевые линии (170, 172, 174) связи, соответственно. Сетевой узел 168, например, маршрутизатор, присоединен к другим сетевым узлам, например, другим базовым станциям, маршрутизаторам, узлам базовых агентов, узлам серверов AAA (аутентификации, авторизации и учета) и так далее, и сети Интернет через сетевую линию 176 связи. Сетевые линии 170, 172, 174, 176 связи могут быть, например, оптоволоконными линиями связи.
BS 108, 110, 112 включают в себя секторизованные приемники, каждый приемник сектора использует отдельную назначенную частоту несущей для рядовой сигнализации, например сигналов потока обмена нисходящей линии связи, направленных на отдельный WT, в соответствии с изобретением. Назначенная частота несущей передатчика сектора, используемая для рядовой сигнализации, также передает широковещательные сигналы, такие как, например, сигналы предоставления, контрольные сигналы и/или маяковые сигналы, с BS на WT. В дополнение, в соответствии с изобретением каждый передатчик сектора базовой станции передает дополнительные сигналы нисходящей линии связи, такие как, например, контрольные сигналы и/или маяковые сигналы в пределах полос частот несущих, выделенных передатчикам смежных сот/секторов для их рядовой сигнализации. Такие сигналы нисходящей линии связи поставляют информацию на WT, например, WT 132, которая может использоваться для оценки и принятия решения, какую частоту несущей выбрать и какие соответствующие сектор/соту базовой станции использовать в качестве точки присоединения. WT, например, WT 132, включают в себя приемники с возможностью обрабатывать информацию с передатчиков секторов BS 108, 110, 112, поставляющих информацию об альтернативных полосах частот несущих, которые могут использоваться для рядовой связи, например, сигнализации канала потока обмена нисходящей линии связи, и которые могут выбираться WT.
Фиг.2 иллюстрирует примерную базовую станцию 200, альтернативно указываемую ссылкой как узел доступа, реализованную в соответствии с настоящим изобретением. BS называется узлом доступа, так как она служит в качестве точки сетевого присоединения WT и предоставляет WT доступ к сети. Базовая станция 200 по фиг.2 может быть более подробным представлением любой из базовых станций 108, 110, 112, системы 100 по фиг.1. Базовая станция 200 включает в себя процессор 202, например, ЦП (центральный процессор, CPU), приемник 204, включающий в себя декодер 206, секторизованный передатчик 208, память 210 и интерфейс 212 I/O (ввода/вывода), соединенные посредством шины 214, через которую различные элементы могут обмениваться данными и информацией. Приемник 204 присоединен к секторизованной антенне 216 и может принимать сигналы с беспроводных терминалов 300 (смотрите фиг.3) в каждом из секторов, обслуживаемых базовой станцией 200. Декодер 206 приемника декодирует принимаемые сигналы восходящей линии связи и извлекает информацию, кодированную WT 300 перед передачей. Секторизованный передатчик 208 включает в себя множество передатчиков, передатчик 218 сектора 1, передатчик 220 сектора N. Каждый передатчик (218, 220) сектора включает в себя кодировщик (222, 224) для кодирования данных/информации нисходящей линии связи и присоединен, соответственно, к антенне (226, 228). Каждая антенна 226, 228 соответствует разному сектору и обычно ориентирована, чтобы передавать в сектор, которому антенна соответствует и может быть расположена. Антенны 226, 228 могут быть отдельными или могут соответствовать разным элементам одиночной многосекторной антенны, которая содержит разные антенные элементы для разных секторов. Каждый передатчик (218, 220) сектора имеет в распоряжении заданную полосу частот несущей, которая должна использоваться для рядовой сигнализации, например, передачи сигналов потока обмена нисходящей линии связи. Каждый передатчик (218, 220) сектора способен к передаче сигналов нисходящей линии связи, например, сигналов предоставления, информационных и управляющих сигналов и/или маяковых сигналов, в своей собственной заданной полосе частот несущей. Каждый передатчик (218, 220) сектора, в соответствии с настоящим изобретением, также передает дополнительные сигналы нисходящей линии связи, например, контрольные сигналы и/или маяковые сигналы, в другие полосы частот несущей, например, полосы частот несущей, назначенные смежным сотам/секторам для их рядовой сигнализации. Интерфейс 212 I/O присоединяет базовую станцию 200 к другим сетевым узлам, например, другим узлам доступа, маршрутизаторам, серверам AAA, узлам базовых агентов и сети Интернет. Память 210 включает в себя подпрограммы 230 и данные/информацию 232. Процессор 202 выполняет подпрограммы 230 и использует данные/информацию 232 в памяти 210 для управления работой базовой станции 200, в том числе планированием пользователей на разные частоты несущих, использующие разные уровни мощности, регулированием мощности, управлением временными характеристиками, связью, сигнализацией и маяковой сигнализацией в соответствии с изобретением. Планирование конкретного пользователя, например конкретного WT 300, на конкретную частоту несущей может происходить в ответ на выбор, выполняемый WT 300, в соответствии с изобретением.
Данные/информация 232 в памяти 210 включают в себя данные 234, например, пользовательские данные, которые должны передаваться на и приниматься с беспроводных терминалов 300, информацию 236 о секторе, включающую в себя частоты несущих, ассоциативно связанные с каждым сектором, и уровни мощности передачи данных, ассоциированных с каждой частотой несущей в пределах сектора, информацию о множестве частот несущих (информацию 238 о несущей 1, информацию 240 о несущей N), информацию 242 маяковых сигналов и широковещательную информацию 243 о загрузке системы. Информация (238, 240) о частотах несущих включает в себя информацию, определяющую частоту несущей и ассоциативно связанную полосу пропускания. Информация 242 о маяковых сигналах включает в себя информацию о тонах, например, информацию, связывающую маяковые сигналы в каждом секторе с отдельными частотами и несущими, и временными характеристиками последовательности, ассоциативно связанными с передачей маяковых сигналов. Информация 243 о загрузке системы включает в себя информацию о смешанной загрузке каждой из различных полос несущих, поддерживаемых базовой станцией 200. Информация 243 о загрузке системы может передаваться с базовой станции 200 на WT 300, которые могут использовать информацию, в некоторых вариантах осуществления, в последовательности операций принятия решения о выборе полосы несущей для установки в пределах приемника WT.
Данные/информация 232 в памяти 210 также включают в себя множество наборов 244 данных/информации о WT, набор для каждого WT: данные/информацию 246 о WT 1, данные/информацию 248 о WT N. Данные/информация 246 о WT 1 включают в себя пользовательские данные на маршруте из/на WT 1, ID (идентификатор) терминала, привязывающий WT к базовой станции 200, ID сектора, идентифицирующий сектор, в котором WT 1 расположен в текущий момент, и информацию о частоте несущей, привязывающую WT 1 к отдельной частоте несущей, используемой для рядовой сигнализации.
Подпрограммы 230 базовой станции включают в себя подпрограммы 250 связи и подпрограммы 252 управления базовой станцией. Подпрограммы 250 связи реализуют различные протоколы связи, используемые базовой станцией 200. Подпрограммы 252 базовой станции включают в себя модуль 254 планировщика и подпрограммы 256 сигнализации. Подпрограммы 252 управления базовой станцией управляют работой базовой станции, в том числе приемника 204, передатчиков (218, 220), планированием, сигнализацией и маяковой сигнализацией в соответствии с настоящим изобретением. Модуль 254 планировщика, например, планировщик, используется для планирования ресурсов эфирных линий связи, например, полосы пропускания во времени, по беспроводным терминалам 300 для восходящей и нисходящей связи. Подпрограммы 252 управления базовой станцией также включают в себя подпрограммы 256 сигнализации, которые управляют: приемником 204, декодером 206, передатчиками (218, 220), кодировщиками (222, 224), формированием рядовых сигналов, скачкообразной перестройкой частоты информационных и управляющих тонов и приемом сигналов. Подпрограмма 258 маяковых сигналов, также включенная в подпрограммы 256 сигнализации, использует информацию 242 о маяковых сигналах для управления формированием и передачей маяковых сигналов в соответствии с изобретением. В соответствии с изобретением в некоторых вариантах осуществления маяковые сигналы, например, сигналы высокой мощности, которые являются относительно узкими в показателях частоты, могут передаваться в каждом секторе в каждой из полос частот несущих, используемых таким сектором/сотой или смежным сектором/сотой. Эти маяковые сигналы в некоторых вариантах осуществления используются WT 300 для сравнения альтернативных имеющихся в распоряжении несущих.
Фиг.3 иллюстрирует примерный беспроводный терминал 300, например, мобильный узел, реализованный в соответствии с настоящим изобретением и использующий способы по настоящему изобретению. Беспроводный терминал 300 по фиг.3 может быть более подробным представлением любого из WT 132, 134, 136, 138, 140, 142, 144, 146, 148, 150, 152, 154, 156, 158, 160, 162, 164, 166 системы 100 по фиг.1. Беспроводный терминал 300 включает в себя приемник 302, передатчик 304, процессор 306, например, ЦП и память 308, соединенные посредством шины 310, через которую различные элементы могут обмениваться данными и информацией.
Приемник 302 присоединен к антенне 312, через которую сигналы нисходящей линии связи принимаются с множества передатчиков секторов базовой станции и соответствующих антенн 226, 228 секторов. Приемник 302 включает в себя одиночный тракт 314 приемника расширенного спектра и контроллер 316 выбора полосы. Тракт 314 приемника расширенного спектра включает в себя РЧ-модуль (цепь синхронизации частоты) (320) для выполнения фильтрации и других операций. РЧ-модуль 320 включает в себя регулируемый фильтр 321 полосы пропускания для режекции частот вне выбранной полосы наряду с пропусканием частот, например, сигнала несущей, попадающей в пределы выбранной полосы. Дополнительные модули 322 также включены в тракт 314 приемника наряду с модулем 324 цифровой сигнальной обработки и модулем 334 детектирования энергии/детектирования SNR. Модуль 324 цифровой сигнальной обработки включает в себя декодер 326 и модуль 328 детектора качества сигнала.
РЧ-модуль 320, дополнительные модули 322 тракта приемника, модуль 324 цифровой сигнальной обработки и модуль 334 детектирования энергии/детектирования SNR используются для приема, декодирования, измерения и оценки различных сигналов, в том числе, например, сигналов предоставления, сигналов данных и информации канала потока обмена, контрольных сигналов и/или маяковых сигналов, передаваемых множеством передатчиков базовой станции соты/сектора с использованием выбранной в текущий момент первой полосы, ассоциативно связанной с отдельной первой частотой несущей. Контроллер 316 выбора полосы выводит сигнал в РЧ-модуль 320 и перестраиваемый фильтр 321, включенный в него для выбора отдельной частоты несущей; РЧ-модуль 320 пропускает компоненты принятого сигнала в пределах полосы частот несущей и осуществляет режекцию по меньшей мере некоторых из сигналов вне выбранной полосы частот несущей. РЧ-модуль 320 также выполняет дополнительную обработку, например, сигналы смешиваются в полосу модулирующих частот. Выходные сигналы, пропускаемые РЧ-модулем 320, обрабатываются, например, фильтруются фильтром полосы модулирующих частот, преобразуются из аналоговых в цифровые сигналы и дополнительно фильтруются цифровым фильтром, дополнительными модулями 322 тракта приемника. Затем сигналы выводятся из дополнительных модулей 322 и пересылаются в модуль 324 цифровой сигнальной обработки и модуль 334 детектирования энергии/детектирования SNR. Некоторые компоненты сигнала, например, с первого передатчика соты/сектора базовой станции, соответствующего выбранной в текущий момент полосе, обрабатываются модулем 324 цифровой сигнальной обработки. В то время как другие компоненты сигнала, например, со второго передатчика соты/сектора, соответствующего другой полосе несущей, обрабатываются модулем 334 детектирования энергии/детектирования SNR. Модуль цифровой сигнальной обработки включает в себя декодер 326, который может декодировать сигналы потока обмена нисходящей линии связи, направленные на отдельный WT 300, тогда как модуль 334 детектирования энергии/детектирования SNR не включает в себя такой способности декодирования.
Выходные данные, например, значения показателей качества, из модуля 328 детектора качества сигнала модуля 324 цифровой сигнальной обработки и из модуля детектирования энергии/детектирования SNR, вводятся в модуль 316 выбора полосы, который управляет выбором настроек полосы частот в РЧ-модуле (схеме синхронизации частоты) 320, в соответствии с изобретением.
Передатчик 304 включает в себя кодировщик 336 и присоединен к антенне 338 передатчика. Данные/информация, например, блоки данных/информации восходящей линии связи могут кодироваться кодировщиком 336, а затем передаваться через антенну 338 на базовую станцию 200.
Память 308 включает в себя подпрограммы 340 и данные/информацию 342. Процессор 306, например, ЦП, выполняет подпрограммы 340 и использует данные/информацию 342 в памяти 308 для управления WT 300 и реализации способов по настоящему изобретению.
Данные/информация 342 беспроводного терминала включают в себя пользовательские данные 344, информацию 346 об устройстве/пользователе/сеансе/ресурсах, информацию 348 о выбранной в текущий момент несущей, информацию 350 об альтернативной несущей, информацию 352 о соте/секторе, информацию 354 о частоте несущей, информацию 356 о детектированном сигнале, информацию 358 о выборе несущей.
Пользовательские данные 344 включают в себя данные, информацию и файлы, которые предназначены для отправки на/или приема с равноправного узла в сеансе связи с помощью беспроводного терминала 300. Информация 346 о пользователе/устройстве/сеансе/ресурсах включает в себя, например, информацию ID терминала, информацию ID базовой станции, информацию ID сектора, информацию о выбранной частоте несущей, информацию о режиме и информацию об идентифицированных маяковых сигналах. Информация ID терминала может быть идентификатором, назначенным WT 300 базовой станцией 200, к которой WT присоединен, который идентифицирует беспроводный терминал 300 для базовой станции 200. Информацией ID базовой станции может быть, например, значение крутизны, ассоциативно связанной с базовой станцией 200 и используемой в последовательностях скачкообразной перестройки частоты. Информация ID сектора включает в себя информацию, идентифицирующую ID сектора приемника/передатчика секторизованной базовой станции, посредством которых передается рядовая сигнализация, и может соответствовать сектору соты, в которой размещен беспроводный терминал 300. Информация о выбранной информации несущей включает в себя информацию, идентифицирующую несущую, например, несущую, на которую был настрое РЧ-модуль, являющуюся используемой BS для передачи сигналов данных нисходящей линии связи, например, сигналов канала потока обмена. Информация о режиме идентифицирует, находится ли беспроводный терминал в состоянии включенном/удержания/ожидания.
Информация 348 о текущей выбранной несущей включает в себя информацию, идентифицирующую выбранную несущую, на которую РЧ-модуль 320 был настроен контроллером 316 выбора полосы. Информация 350 об альтернативной несущей включает в себя информацию, идентифицирующую альтернативную несущую, которой соответствует информация, оцениваемая модулем 334 детектирования энергии/детектирования SNR. Информация 352 ID соты/сектора может включать в себя информацию, используемую для построения последовательностей скачкообразной перестройки частоты, используемых при обработке, передаче и приеме данных, информации, управляющих сигналов и маяковых сигналов. Информация 354 о частоте несущей может включать в себя информацию, ассоциативно связывающую каждый сектор/соту базовых станций в системе связи с определенными частотами несущих или частотами, полосами частот, маяковыми сигналами и комбинациями тонов. Информация 354 о частоте несущей также включает в себя информацию 355 сопоставления показателей качества, которая ассоциативно связывает каждое значение показателя качества с отдельной частотой несущей, которая может быть выбрана контроллером 316 выбора полосы.
Информация 356 о детектированном сигнале включает в себя информацию 360 энергии сигнала, информацию 362 SNR, информацию 364 оцененных ошибок, 1-е значение 366 показателя качества и 2-е значение 368 показателя качества. Информация 356 о детектированном сигнале также включает в себя информацию 370 синхронизации и информацию 372 широковещательного сигнала.
Информация 356 о детектированном сигнале включает в себя информацию, которая была выведена из детектора 328 качества сигнала модуля 324 цифровой сигнальной обработки и модуля 334 детектирования энергии/детектирования SNR в приемнике 302. Модуль 328 детектирования качества сигнала может измерять и записывать энергию 360 сигнала, SNR 362 и/или оцененную частоту 364 появления ошибок компонента сигнала из первого приемника и определять 1-е значение 366 показателя качества, указывающее на качество канала, например, канала потока обмена нисходящей линии связи, между первым передатчиком и WT 300 при использовании полосы несущей, на которую приемник 302 настроен в текущий момент. Модуль 334 детектирования энергии/детектирования SNR может измерять и записывать энергию 360 сигнала и/или SNR 362 компонента сигнала из второго передатчика для определения 2-го значения 368 показателя качества, указывающего на потенциально возможный канал, например, канал потока обмена нисходящей линии связи между вторым передатчиком и WT 300 в полосе альтернативной несущей.
Информация 370 синхронизации может включать в себя, в некоторых вариантах осуществления CDMA, например, информацию синхронизации основанных на контрольных сигналах временных характеристик, используемую и/или получаемую приемником, например, при обработке контрольного сигнала CDMA. В некоторых вариантах осуществления OFDM информация синхронизации может включать в себя информацию восстановления временных характеристик символа. Широковещательная информация 372 может включать в себя, например, имеющую отношение к широковещательной передаче информацию, используемую и/или получаемую приемником при обработке сигналов, например, контрольных или маяковых сигналов.
Информация 358 выбора несущей включает в себя информацию 374 предопределенного порогового значения, информацию 376 о предварительно выбранном интервале, информацию 378 частоты изменения, информацию 380 о качестве обслуживания (QoS), информацию 382 о загрузке системы. Информация 358 выбора несущей является информацией, например, критериями, предельными значениями и т. п., используемыми WT 300 при принятии решений о выборе полосы при оценке информации о детектированных сигналах, например, при сравнении 1-го значения 366 показателя качества со 2-м значением 368 показателя качества. Информация 374 предопределенного порогового значения включает в себя уровни, используемые для сравнения со значениями 366, 368 показателей качества для принятия решений о выборе полосы. Информация 376 о предварительно выбранном интервале включает в себя временные интервалы фиксированной продолжительности и интервалы фиксированного количества измерений сигнала, каждый из которых может использоваться для определения предопределенного интервала, в котором должно существовать непротиворечивое условие, например, второй показатель качества превышает первый показатель качества, до того, как контроллер 316 выбора полосы изменяет выбор для РЧ-модуля 320 приемника. Информация 378 частоты изменения включает в себя критерии, используемые для идентификации, когда первое значение 366 показателя качества сигнала уменьшается со временем, в то время как второе значение 368 показателя качества сигнала увеличивается со временем, а разность между первым и вторым значениями показателя качества сигнала изменяет знак. Информация 380 о качестве обслуживания (QoS) включает в себя информацию относительно QoS, предоставляемого отдельным пользователям, выбор полосы как функции уровня QoS, которое должно быть предоставлено пользователю, и изменения в выборе как результат изменений в уровне QoS, которое должно быть предоставлено пользователю. Информация 382 о загрузке системы включает в себя принятую информацию относительно загрузки системы, передаваемой базовой станцией 200, которая может использоваться в функции, управляющей решениями касательно выбора полосы.
Подпрограммы 340 WT включают в себя подпрограммы 384 связи и подпрограммы 386 управления беспроводным терминалом. Подпрограмма 384 связи беспроводного терминала реализует различные протоколы связи, используемые беспроводным терминалом 300. Подпрограммы 386 управления беспроводным терминалом выполняют функциональные операции управления беспроводным терминалом 300, в том числе регулирование мощности, управление временными характеристиками, управление сигнализацией, обработку данных, I/O, функции управления приемником и выбором полосы несущей в соответствии с изобретением. Подпрограммы 386 управления WT включают в себя подпрограммы 388 сигнализации, модуль 390 контроллера приемника и модуль 392 выбора полосы несущей. Подпрограммы 388 сигнализации, использующие данные/информацию 342 в памяти 308, управляют сигнализацией, например, передаваемыми по восходящей и нисходящей линии связи сигналами, WT 300. Модуль 390 контроллера приемника в координации с модулями 324, 334 управляет работой приемника 302, в том числе декодированием, детектированием энергии и/или детектированием SNR, выполняемым над принятыми сигналами, и формированием 1-го и 2-го значений 366, 368 показателя качества, в соответствии с настоящим изобретением. Модуль 392 выбора полосы несущей в координации с контроллером 316 выбора полосы использует данные/информацию, извлеченные из принятого сигнала, в том числе 1-е и 2-е значения 366, 368 показателя качества, а также информацию 358 выбора несущей для принятия решений в отношении того, какую несущую выбирать для настройки РЧ-модуля 320 приемника 302, в соответствии с настоящим изобретением.
Фиг.4 - пример показательной комбинации 500 приемника 501 беспроводного терминала/антенны 502, реализованной в соответствии с настоящим изобретением. Комбинация 500 приемника/антенны по фиг.4 может использоваться в качестве комбинации приемника 302/антенны 312 в WT 300 по фиг.3. Приемник 501 иллюстрирует примерный вариант осуществления приемника в соответствии с настоящим изобретением, который может обрабатывать два компонента принятого сигнала, одновременно включенные в одну и ту же полосу выбранной несущей, каждый компонент передает разную информацию, например, информацию, соответствующую одной из разных полос несущих, передаваемых разными передатчиками и/или разными передающими антеннами. Два компонента сигнала могут соответствовать разным секторам соты и/или разным сотам.
Приемник 501 по фиг.4 использует единственный тракт РЧ-обработки, который включает в себя одиночный модуль 502 РЧ-обработки (модуль синхронизации). Приемник 501 привязан к антенне 502, которая принимает сигналы нисходящей линии связи с множества передатчиков базовой станции сектора/соты. Антенна 504 привязана к модулю 502 РЧ-обработки. Модуль 502 РЧ-обработки включает в себя селективный РЧ-фильтр 506 и схему 508 микшера. РЧ-фильтр 506 может быть реализован в виде фильтра полосы пропускания и служит в качестве схемы синхронизации частоты. Модуль 502 РЧ-обработки был настроен на частоту несущей, выбранную контроллером 510 выбора несущей. РЧ-фильтр пропускает компоненты принятого сигнала в пределах полосы выбранной несущей и осуществляет режекцию по меньшей мере некоторых компонентов сигнала вне полосы выбранной несущей.
Принятый сигнал полосы пропускания с антенны 504 вводится в РЧ-фильтр 506 и обрабатывается схемой 508 микшера, давая в результате основополосный сигнал. Результирующий основополосный сигнал выводится из модуля 502 РЧ-обработки и вводится в фильтр 512 полосы модулирующих частот. Отфильтрованный выходной сигнал из фильтра 512 полосы модулирующих частот вводится в модуль 514 (аналогово-цифрового) A/D-преобразователя, где выполняется аналогово-цифровое преобразование. Результирующий выходной цифровой сигнал вводится в цифровой фильтр 516 для дополнительной фильтрации. Затем выходной сигнал цифрового фильтра 516, первый компонент 517 сигнала, например, изначально происходящий из передатчика соты/сектора базовой станции, вводится в модуль 518 цифровой сигнальной обработки, в то время как другой выходной сигнала цифрового фильтра 516, второй компонент 519 сигнала, например, изначально происходящий из второго передатчика базовой станции соты/сектора, выводится в модуль 536 детектирования энергии/детектирования SNR. Модуль 518 цифровой сигнальной обработки включает в себя модуль 522 временной синхронизации, декодер 523 и детектор 526 качества сигнала. Таким образом, модуль 518 цифровой сигнальной обработки способен к полному декодированию широковещательной, а также специфической WT информации, например, информации, предназначенной для отдельного WT, а не других WT.
Модуль 522 временной синхронизации используется для временной синхронизации принятых данных, являющихся обрабатываемыми, например, принятых сигналов нисходящей линии связи. Предполагаются варианты осуществления CDMA, так же как и OFDM. Модуль 522 временной синхронизации, в вариантах осуществления CDMA, может быть реализован с использованием известных технологий декодирования, обратного кодированию с расширением спектра. Модуль 522 временной синхронизации, в вариантах осуществления OFDM, может быть реализован в виде схемы восстановления временных характеристик символа, использующей известные технологии. Декодер 523 включает в себя широковещательный модуль 524 для декодирования принятых широковещательных сигналов, например, маяковых сигналов, контрольных сигналов и т. п., и специальный мобильный модуль 525 для декодирования принятых данных/информации нисходящей линии связи, например, сигналов потока обмена нисходящей линии связи, предназначенных для отдельного WT 300, которому принадлежит приемник 501.
Детектор 526 качества сигнала включает в себя схему 528 измерения энергии сигнала, схему 530 SNR и/или блок 532 оценки ошибок. Детектор 526 качества сигнала получает оценку качества для канала, с первого передатчика соты/сектора базовой станции на WT 300, используемого для сигнализации канала потока обмена нисходящей линии связи. Оценка качества основана на выходном сигнале схемы 528 измерения энергии сигнала (например, оценка качества может быть энергией, измеренной в компоненте сигнала, такого как тон маякового сигнала, или основана на энергии сигнала или компонента сигнала), выходной сигнал схемы 530 SNR, который является функцией измеренной энергии сигнала и/или измеренной или оцененной частоты появления ошибок принятых данных/информации, определенной блоком 532 оценки ошибок. Информация 533 оценки качества сигнала, например, значение показателя качества, соответствующее выбранной в текущий момент полосы несущей, пересылается в контроллер 510 выбора полосы, чтобы использоваться при принятии решения выбора полосы.
В реализации фиг.4 обработка второго компонента сигнала показана как выполняемая отдельной комбинацией компонентов приемника, например, необязательного модуля временной синхронизации, необязательного декодера 534 широковещательного сигнала и модуля 536 детектирования энергии/детектирования SNR. Однако должно быть принято во внимание, что элементы модуля 518 цифровой сигнальной обработки могут использоваться на разделяемой по времени основе, где первый и второй компоненты сигнала принадлежат к одному и тому же типу, например, сигналам OFDM. В случаях, где вторым компонентом сигнала является маяковый сигнал или другой сигнал, где временная синхронизация и/или декодирование не требуются для формирования значения показателя качества, модуль 520 временной синхронизации и декодер 534 широковещательного сигнала могут быть опущены. Однако в случаях, где первый компонент сигнала соответствует сигналу первого типа, например, сигналу OFDM, а второй компонент сигнала соответствует сигналу второго типа, например, сигналу CDMA, раздельные сигналы и/или модули для формирования значений качества сигналов для первого и второго компонентов сигнала могут быть более эффективными по затратам, чем использование схемы, например, реконфигурируемой схемы, которая может конфигурироваться для манипулирования сигналами разных типов.
В некоторых вариантах осуществления, например, вариантах осуществления CDMA, второй компонент 519 сигнала обрабатывается посредством модуля 520 временной синхронизации. Модуль 520 временной синхронизации, в вариантах осуществления CDMA, может быть реализован с использованием известных технологий декодирования, обратного кодированию с расширением спектра. В некоторых вариантах осуществления, например, различных вариантах осуществления CDMA, второй компонент 519 сигнала также обрабатывается посредством декодера 534 широковещательных сигналов.
Второй компонент сигнала, который может быть подвергнут необязательной обработке, описанной выше, вводится в модуль 536 детектирования энергии и/или детектирования SNR. Обработанный принятый компонент сигнала, являющийся оцениваемым модулем 536 детектирования энергии и/или детектирования SNR, может быть, например, в некоторых вариантах осуществления OFDM, детектированным маяковым сигналом, переданным со второго передатчика, например, передатчика базовой станции соседней соты/сектора относительно первого передатчика базовой станции соты/сектора, который передает первый компонент сигнала. Так, в некоторых вариантах осуществления информация 537 оценки качества является значением, указывающим энергию, детектированную в маяковом сигнале, например, тоне маякового сигнала, или основана на энергии маякового сигнала. Обработанный принятый компонент сигнала, являющийся оцениваемым модулем 536 детектирования энергии и/или детектирования SNR, может быть, например, в некоторых вариантах осуществления CDMA, детектированным контрольным сигналом, переданным со второго передатчика, например, передатчика базовой станции соседней соты/сектора относительно первого передатчика базовой станции соты/сектора, который передает первый компонент сигнала. Модуль 536 детектирования энергии и/или детектирования SNR формирует информацию, которая может использоваться в качестве оценки качества для потенциально возможного канала нисходящей линии связи между вторым передатчиком базовой станции соты/сектора и WT 300, соответствующего второму компоненту сигнала, являющемуся оцениваемым, информацию 537 оценки качества сигнала. Сформированная оценка качества основана на измерении энергии сигнала или на измерении SNR, которое является функцией детектированной энергии сигнала. Информация 537 оценки качества сигнала пересылается в контроллер 510 выбора полосы для использования в принятии решений выбора полосы, например, для выбора между первой и второй полосами частот, соответствующими первому и второму компоненту соответственно.
В некоторых вариантах осуществления модуль 536 детектирования энергии/детектирования SNR является более простым по вычислительной сложности, например, по количеству вентилей или выполняемых инструкций, чем модуль 518 цифровой сигнальной обработки. Это является возможным, так как, во многих случаях, для формирования информации оценки качества, соответствующей второму компоненту сигнала, не является необходимым декодировать принятый компонент сигнала, а в случаях, где используется декодирование, оно может быть ограничено до декодирования широковещательных данных, которые обычно более легки для декодирования, чем специфичные мобильному устройству данные, вследствие используемого типа кодирования, в сравнении со случаем специфичных мобильному устройству данных, и/или уровня передачи мощности широковещательных данных, который часто более высок, чем уровень передачи мощности специфичных мобильному устройству данных, так как широковещательный сигнал предназначен для достижения многочисленных мобильных устройств.
Информация (533, 537) о качестве компонента сигнала, переправленная из модуля 518 цифровой сигнальной обработки и модуля 536 детектирования энергии/детектирования SNR, используется контроллером 510 выбора полосы, для принятия решений относительно настроек полосы частот несущей, которые должны использоваться модулем 502 РЧ-обработки, например, какая полоса и, соответственно, какой передатчик сектора базовой станции должны быть выбраны для приема передач нисходящей линии связи.
В некоторых вариантах осуществления приемник 501 по фиг.4 является приемником расширенного спектра, который обрабатывает сигнал расширенного спектра, например, CDMA и/или OFDM. В некоторых вариантах осуществления OFDM необязательный модуль 520 временной синхронизации, соответствующий второму компоненту, не используется. В некоторых вариантах осуществления OFDM может использоваться декодер 534 широковещательного сигнала, в то время как в других вариантах осуществления OFDM декодер 534 широковещательного сигнала не является необходимым и опущен. В вариантах осуществления, где второй компонент сигнала является сигналом CDMA, используется модуль 520 временной синхронизации, в то время как декодер 534 широковещательного сигнала может использоваться или может не использоваться.
Приемник 501 по фиг.4 включает в себя интерфейс 507 I/O, присоединенный к модулю 518 цифровой сигнальной обработки, модулю 536 детектирования энергии/детектирования SNR и контроллеру 510 выбора полосы через шину 909, посредством которой различные элементы могут обмениваться данными и информацией. В других вариантах осуществления шина 509 может быть присоединена к другим компонентам приемника, например, декодеру 534 широковещательного сигнала и/или декодеру 534 временной синхронизации. Приемник 501 может связываться с другими элементами WT 300 через интерфейс 507 I/O, который присоединяет приемник 501 к шине 312. Декодированные сигналы канала потока обмена нисходящей линии связи могут передаваться через интерфейс 507, например, на одно или более внешних устройств, таких как дисплей и/или другие компоненты WT.
Фиг.5 - иллюстрация 600, используемая для пояснения примерного варианта осуществления изобретения, использующего приемник 500 с одиночным модулем РЧ-обработки по фиг.4. Показаны две точки 101, 607 сетевого присоединения. Каждая точка сетевого присоединения может служить в качестве точки присоединения беспроводного терминала, посредством беспроводного соединения, к сети. Точки 601, 607 сетевого присоединения могут быть в одной и той же соте, разных сотах и даже в пределах одного и того же сектора соты в зависимости от варианта осуществления. Каждая из точек 601, 602 сетевого присоединения использует разную полосу частот для передачи пользовательских данных. Модуль 1 601 точки сетевого присоединения включает в себя первый передатчик 602 BS, первый приемник 603 сектора BS. Второй модуль 607 точки сетевого присоединения включает в себя второй передатчик 604 сектора базовой станции и соответствующий приемник 605 сектора BS.
Использование первого и второго передатчиков 602, 604, соответствующих разным точкам сетевого присоединения, далее будет описано с использованием в качестве примера случая, где первый передатчик 602 соответствует сектору А примерной соты 102, а второй передатчик 602 соответствует сектору В примерной соты 102. Передатчики 602, 604 передают сигналы нисходящей линии связи, в том числе рядовые сигналы канала потока обмена, например, пользовательские данные, необязательно, контрольные сигналы и маяковые сигналы. Передатчики 602, 604 могут использовать разные антенны, направленные на разные секторы или соты. Сигнализация с каждого передатчика сектора включает в себя рядовую сигнализацию, например, сигналы предоставления, необязательно, контрольные сигналы и/или, необязательно, маяковые сигналы, на своей собственной заданной полосе частот несущей, а маяковые сигналы на одной или более, например, других двух, полосах частот несущих, используемых в соте. Передатчик 602 сектора А BS передает сигналы 606 нисходящей линии связи, в том числе, например, сигналы потока обмена нисходящей линии связи сектора А, сигналы предоставления сектора А, необязательно, контрольные сигналы сектора А и/или, необязательно, маяковые сигналы сектора А в полосе 618 частот с частотой f0 624 несущей, маяковые сигналы 608 сектора А в полосе 620 частот с частотой f1 626 несущей и маяковые сигналы сектора 610 сектора А в полосе 622 частот с частотой f2 628 несущей. Передатчик 604 сектора В BS передает сигналы 612 нисходящей линии связи, в том числе, например, сигналы потока обмена нисходящей линии связи сектора В, сигналы предоставления сектора В, необязательно, контрольные сигналы сектора В и/или, необязательно, маяковые сигналы сектора В в полосе 622 частот с частотой f2 628 несущей. Передатчик 604 сектора В BS также передает маяковые сигналы сектора В в полосе 618 частот с частотой f0 624 несущей и маяковые сигналы 616 сектора В в полосе 620 частот с частотой f1 626 несущей.
Допустим, что приемник 630, например, примерный вариант осуществления приемника 500 по фиг.4, настроен на полосу 618 частот несущей с частотой f0 624 несущей. Приемник 630 принимает два компонента 632, 634 сигнала, первый компонент 632 сигнала, включающий в себя, например, рядовую сигнализацию, сигналы предоставления, контрольные сигналы и/или маяковые сигналы с передатчика 602 сектора А, обрабатывается модулем 518 цифровой сигнальной обработки, тогда как второй компонент 634 сигнала, например, маяковый сигнал с передатчика 604 сектора В обрабатывается модулем 536 детектирования энергии/детектирования SNR. По первому компоненту 632 и с использованием модуля 518 цифровой сигнальной обработки приемник 630 определяет оценку качества канала потока обмена нисходящей линии связи между передатчиком сектора А BS и приемником 630, использующего частоту f0 624 несущей и полосу 618 частот. По второму компоненту 634 и с использованием модуля 536 детектирования энергии/детектирования SNR приемник 630 определяет оценку качества потенциально возможного альтернативного канала потока обмена нисходящей линии связи между передатчиком 604 сектора В BS и приемником 630, использующего частоту f2 628 несущей и полосу 622 частот.
В некоторых вариантах осуществления изобретения маяковые сигналы могут не использоваться, а другие сигналы нисходящей линии связи могут приниматься и обрабатываться ради решений выбора полосы. Например, каждый передатчик сектора и/или соты передает некоторые сигналы нисходящей линии связи, например, сигналы предоставления, сигналы идентификации базовой станции сектора/соты и/или контрольные сигналы, в полосе частот, используемой таким передатчиком для рядовой сигнализации канала потока обмена нисходящей линии связи, а также передает некоторые дополнительные сигналы нисходящей линии связи, например, сигналы идентификации базовой станции сектора/соты, и/или контрольные сигналы, в других полосах частот, используемых другими, соседними, передатчиками соты/сектора для их рядовой сигнализации потока обмена нисходящей линии связи. Передача в других полосах частот может происходить с периодическими интервалами и может соответствовать по длительности небольшому количеству времени относительно передачи сигналов в сектор, которому соответствует передатчик.
Приемник, такой как приемник 500 с одиночным РЧ-трактом по фиг.4, в соответствии с изобретением, настроен на полосу частот, но принимает компоненты сигнала нисходящей линии связи с многочисленных передатчиков соты/или сектора, которые осуществляют передачу в полосе частот. Приемник принимает и обрабатывает композитный сигнал, композитный сигнал в пределах настроенной полосы частот, композитный сигнал включает в себя первый и второй компоненты с двух разных передатчиков. Информация может формироваться по первому и второму компонентам сигнала, которые могут и используются для выяснения информации указания качества касательно двух альтернативных полос частот, каждая полоса частот соответствует разному компоненту сигнала.
В одном конкретном примерном варианте осуществления OFDM (мультиплексирования с ортогональным частотным разделением каналов) маяковый сигнал реализован в виде снабженного относительно высокой мощностью сигнала, который передается в качестве узкополосного сигнала в показателях частоты, например, с использованием одиночного или небольшого количества тонов. Когда маяковый сигнал передается в примерном варианте осуществления OFDM, наибольшая часть мощности передачи сконцентрирована в одном или небольшом количестве тонов, которые составляют маяковый сигнал. В некоторых вариантах осуществления первый компонент 632 сигнала включает в себя компонент маякового сигнала, соответствующий первому передатчику, тогда как второй компонент сигнала включает в себя маяковый сигнал, соответствующий второму, например, другому передатчику, который, нормально, будет соответствовать другому сектору и/или соте. В одном из таких вариантов осуществления выбор несущей основан на оценке маяковых сигналов. В некоторых вариантах осуществления маяковые сигналы являются узкими по ширине частот в сравнении с полосой фильтра полосы пропускания, например, самое большее 1/20 ширины частот фильтра полосы пропускания.
В соответствии с настоящим изобретением первый и второй компоненты сигнала могут передаваться одновременно, например, на разных частотах в пределах выбранной в текущий момент полосы частот. В качестве альтернативы, первый и второй компоненты сигнала могут передаваться и приниматься один за другим. Фиг.6 - блок-схема 700 последовательности операций способа, иллюстрирующая примерный способ управления системой связи в соответствии с настоящим изобретением. Фиг.6 содержит комбинацию фиг.6А и 6В. Действие начинается на этапе 702, где система связи инициализируется, например, базовые станции повторно инициализируются, а мобильные узлы запитываются. Действие переходит с этапа 702 на этап 704.
На этапе 704 первый передатчик базовой станции, который преимущественно осуществляет передачу в первой полосе частот, управляется, чтобы передавать первый компонент сигнала в упомянутой первой полосе частот. Действие переходит с этапа 704 на этап 706. На этапе 706 второй передатчик базовой станции, который преимущественно осуществляет передачу во второй полосе частот, управляется, чтобы передавать, например, периодически, второй компонент сигнала в упомянутой первой полосе частот. На этапе 708 упомянутый первый передатчик базовой станции управляется, чтобы передавать, например, периодически, сигнал в упомянутой второй полосе частот, которая является отличной от первой полосы частот. В некоторых вариантах осуществления вторая полоса частот полностью находится за пределами первой полосы частот, тогда как в других вариантах осуществления может быть частичное перекрытие в первой и второй полосах частот. В некоторых вариантах осуществления первый передатчик и второй передатчик расположены в разных секторах одной и той же соты; первый компонент сигнала передается с использованием первой антенны или антенного элемента, соответствующих первому сектору в первом секторе упомянутой той же самой соты, а второй компонент сигнала передается с использованием второй антенны или антенного элемента, соответствующих второму сектору упомянутой той же самой соты. В некоторых вариантах осуществления первый передатчик и второй передатчик расположены в разных сотах. В таком варианте осуществления первый компонент сигнала передается с использованием первой антенны или антенного элемента, соответствующих первой соте, а второй компонент сигнала передается с использованием второй антенны или антенного элемента, соответствующих второй соте. Действие переходит с этапа 708 на этап 710.
На этапе 710 приемник мобильного узла управляется, чтобы передавать сигнал, включающий в себя первый компонент и второй компонент сигнала. В некоторых вариантах осуществления сигнал принимается за период времени, а первый и второй компоненты сигнала принимаются в разные моменты времени. В некоторых вариантах осуществления первый и второй компоненты сигнала принимаются одновременно, например, на разных частотах в пределах первой полосы частот.
Затем на этапе 712 фильтр полосы пропускания в упомянутом приемнике мобильного узла управляется, чтобы пропускать первый и второй компоненты сигнала, упомянутый первый и второй частотные компоненты находятся в пределах выбранной полосы частот. Фильтр полосы пропускания осуществляет режекцию сигналов вне первой полосы частот. В некоторых вариантах осуществления, например варианте осуществления OFDM, в котором первый и второй частотные компоненты являются маяковыми сигналами, первый и второй компоненты сигнала являются узкими по частоте по сравнению с шириной упомянутого фильтра полосы пропускания, например, самое большее 1/20 ширины частот фильтра полосы пропускания. В некоторых вариантах осуществления первая и вторая полосы частот занимают по меньшей мере 1 МГц в ширину, фильтр полосы пропускания имеет полосу пропускания, меньшую чем 2 МГц по ширине.
Действие переходит с этапа 712 на этап 714. На этапе 714 упомянутый мобильный узел управляется, чтобы выполнять первое измерение сигнала над упомянутым первым компонентом сигнала для формирования первого показателя качества сигнала. На этапе 716 упомянутый мобильный узел управляется, чтобы выполнять второе измерение сигнала над упомянутым вторым компонентом сигнала для формирования второго показателя качества сигнала. Действие переходит с этапа 716 на этап 718. На этапе 718 мобильный узел управляется, чтобы выбирать между работой в первой полосе частот и второй полосе частот, ассоциативно связанной с упомянутым вторым частотным компонентом, в качестве функции упомянутых первого и второго показателей качества. Действие переходит с этапа 718 на этап 720.
В некоторых вариантах осуществления этап 710 фильтрации, этап 712 фильтрации и этапы 714, 716 измерения повторяются много раз, а выбор между упомянутыми первой и второй полосами частот по этапу 718 выполняется после того, как второй показатель качества превышает упомянутый первый показатель качества в течение предопределенного интервала, например, временного интервала предопределенной продолжительности или фиксированного количества измерений сигнала. Это делается, чтобы предотвратить переключение полос в ответ на краткосрочное или неустановившееся изменение в условиях.
В некоторых вариантах осуществления выбор основан на предопределенном пороговом значении. Например, выбор включает в себя: выбор полосы частот, соответствующей более низкому значению показателя качества сигнала, когда первое и второе значения показателей качества оба превышают упомянутое пороговое значение в течение предопределенного интервала. Таким образом, когда оба компонента сигнала показывают удовлетворительные условия, полоса более низкого качества, например, более низкой мощности, может выбираться с освобождением полосы более высокой мощности для использования другим мобильным устройством.
Выбор может влечь за собой выбор полосы частот, соответствующей более высокому значению качества сигнала, когда одно из упомянутых первого и второго значений качества сигнала находится ниже упомянутого предопределенного порогового значения, тем самым выбор лучшей полосы, когда качество сигнала является предметом рассмотрения. Выбор также может повлечь за собой выбор второй полосы частот, когда упомянутое первое значение качества сигнала уменьшается со временем, а упомянутое второе значение качества сигнала повышается со временем, и разница в первом и втором значениях качества меняет знак, указывая, что беспроводный терминал направляется к передатчику второго компонента сигнала и от передатчика первого компонента.
В некоторых вариантах осуществления этап выбора является функцией качества обслуживания (QoS), которое должно быть предоставлено мобильному узлу, например, пользователю, упомянутая функция выбора изменяется в ответ на информацию, указывающую изменение в QoS, которое должно предоставляться упомянутому пользователю. Это изменение может быть реализовано в виде изменения в пороговом качестве, используемом упомянутым модулем выбора для выбора полосы частот.
В некоторых вариантах осуществления этап выбора является функцией загрузки системы связи, а способ дополнительно содержит прием мобильным узлом, например, с базовой станции, информации, указывающей на загрузку системы связи, и модификацию упомянутой функции выбора в ответ на показание в изменении загрузки системы связи. Например, в случае, где беспроводный терминал обнаруживает интенсивное использование первой полосы частот, выбор может изменять вес, используемый при определении выбора, чтобы создать более сильное предпочтение для второй полосы частот.
На этапе 720 действие направляется на основании того, выбрана первая полоса частот или выбрана вторая полоса частот. Если выбрана первая полоса частот, то действие переходит через соединительную вершину А 722 на этап 704; однако, если выбрана вторая полоса частот, действие переходит на этап 724.
На этапе 724 фильтр полосы пропускания регулируется, чтобы пропускать упомянутую вторую полосу взамен упомянутой первой полосы. Действие переходит с этапа 724 через соединительную вершину В 726 на этап 728.
На этапе 728 второй передатчик базовой станции, который преимущественно осуществляет передачу во второй полосе частот, управляется, чтобы передавать третий компонент сигнала в упомянутой второй полосе частот. На этапе 730 первый передатчик базовой станции или третий передатчик базовой станции, который преимущественно осуществляет передачу в первой полосе частот, управляется, чтобы передавать четвертый компонент сигнала в упомянутой второй полосе частот. На этапе 732 вторая базовая станция управляется, чтобы передавать сигнал в упомянутой первой полосе частот. На этапе 734 приемник мобильного узла управляется, чтобы принимать сигнал, включающий в себя третий компонент сигнала и четвертый компонент сигнала. Действие переходит с этапа 734 на этап 736. На этапе 736 упомянутый фильтр полосы пропускания в мобильном узле управляется, чтобы пропускать третий и четвертый компоненты сигнала, находящиеся в пределах второй полосы частот. На этапе 738 мобильный узел управляется, чтобы выполнять третье измерение сигнала над упомянутым третьим компонентом сигнала для формирования третьего показателя качества. На этапе 740 мобильный узел управляется, чтобы выполнять четвертое измерение сигнала над упомянутым четвертым компонентом сигнала для формирования четвертого показателя качества. Действие переходит с этапа 740 на этап 742.
На этапе 742 мобильный узел управляется, чтобы выбирать между работой в первой полосе частот и работой во второй полосе частот, в качестве функции упомянутых третьего и четвертого показателей качества сигнала. Действие переходит с этапа 742 на этап 744.
На этапе 744 действие направляется на основании того, первая или вторая полоса частот выбрана. Если выбрана вторая полоса частот, действие переходит с этапа 744 через соединительную вершину С 748 на этап 728. Однако если выбрана первая полоса частот, то действие переходит с этапа 744 на этап 746, где фильтр полосы пропускания в мобильном узле управляется для пропускания упомянутой первой полосы частот взамен упомянутой второй полосы частот. Действие переходит с этапа 746 через соединительную вершину А 722 на этап 704.
Фиг.7-12 используются для иллюстрации примерного выбора сигналов и полосы примерным приемником беспроводного терминала в соответствии с настоящим изобретением.
Фиг.7 показывает часть примерной системы 800 беспроводной связи, поддерживающей многочисленные несущие и сигнализацию OFDM расширенного спектра, реализованную в соответствии с настоящим изобретением. Система 800 может быть примерным вариантом осуществления системы 100 по фиг.1. Фиг.7 включает в себя множество многосекторных сот, соту 1 802, соту 2 804, соту 3 806. Каждая сота (802, 804, 806) представляет зону беспроводного обслуживания для базовой станции (BS), (BS1 808, BS2 810, BS 3 812), соответственно. BS 808, 810, 812 могут быть примерными вариантами осуществления BS 200 по фиг.2. BS 808, 810, 812 соединены через сеть и присоединены к другим сетевым узлам и сети Интернет. В примерном варианте осуществления каждая сота 802, 804, 806 включает в себя три сектора (A, B, C). Сота 1 802 включает в себя сектор А 814, сектор В 816 и сектор С 818. Сота 2 804 включает в себя сектор А 820, сектор В 822 и сектор С 824. Сота 3 806 включает в себя сектор А 826, сектор В 828 и сектор С 830. Фиг.7 также включает в себя примерный WT 801, реализованный в соответствии с настоящим изобретением. WT 801 может быть примерным вариантом осуществления WT 300 по фиг.3. Текущая точка присоединения примерного WT 801 является передатчиком сектора 3 818 BS 1 808. WT 801 является перемещающимся по направлению к BS 2 810, как показано стрелкой 803.
Фиг.8 - пример показательной комбинации 900 приемника 901 беспроводного терминала/антенны 902, реализованной в соответствии с настоящим изобретением. Комбинация 900 приемника/антенны по фиг.8 может использоваться в качестве комбинации приемника 302/антенны 312 в WT 300 по фиг.3 или WT 801 по фиг.7. Приемник 901 иллюстрирует примерный вариант осуществления приемника в соответствии с настоящим изобретением, который может обрабатывать многочисленные компоненты принятого сигнала, включенные в одну и ту же полосу выбранной несущей, каждый компонент передает разную информацию, например, информацию, соответствующую разным полосам несущих, передаваемым разными передатчиками и/или разными передающими антеннами. Вариант осуществления по фиг.8 является хорошо приспособленным там, где компоненты сигнала передаются с использованием одной и той же технологии, например, одного типа модуляции.
Приемник 901 по фиг.8 использует единственный тракт РЧ-обработки, который включает в себя одиночный модуль 902 РЧ-обработки (модуль синхронизации). Приемник 901 присоединен к антенне 904, которая принимает сигналы нисходящей линии связи с множества передатчиков базовой станции сектора/соты. Антенна 904 присоединена к модулю 902 РЧ-обработки. Модуль 902 РЧ-обработки включает в себя управляемый РЧ-фильтр 906 и схему 908 микшера. РЧ-фильтр 906 может быть реализован в виде фильтра полосы пропускания и служит в качестве схемы синхронизации частоты. Модуль 902 РЧ-обработки был настроен на частоту несущей, выбранную контроллером 910 выбора несущей. РЧ-фильтр пропускает компоненты принятого сигнала в пределах полосы выбранной несущей и осуществляет режекцию по меньшей мере некоторых компонентов сигнала вне полосы выбранной несущей.
Принятый сигнал полосы пропускания с антенны 904 вводится в РЧ-фильтр 906 и обрабатывается схемой 908 микшера, давая в результате основополосный сигнал. Результирующий основополосный сигнал выводится из модуля 902 РЧ-обработки и вводится в фильтр 912 полосы модулирующих частот. Отфильтрованный выходной сигнал из фильтра 912 полосы модулирующих частот вводится в модуль 914 A/D-преобразователя, где выполняется аналого-цифровое преобразование. Результирующий выходной цифровой сигнал вводится в цифровой фильтр 916 для дополнительной фильтрации. Затем выходной сигнал цифрового фильтра 916 вводится в модуль 918 цифровой сигнальной обработки. Модуль 918 цифровой сигнальной обработки включает в себя модуль 922 временной синхронизации, декодер 923, модуль 927 идентификации маякового сигнала и детектор 926 качества сигнала. Таким образом, модуль 918 цифровой сигнальной обработки способен к полному декодированию широковещательной, а также специфичной WT информации, например, информации, предназначенной для отдельного WT, а не других WT.
Модуль 922 временной синхронизации используется для временной синхронизации принятых данных, являющихся обрабатываемыми, например, принятых сигналов нисходящей линии связи. Модуль 922 временной синхронизации может быть реализован в качестве схемы восстановления временных характеристик символа, использующей известные технологии. Декодер 923 включает в себя широковещательный модуль 924 для декодирования принятых широковещательных сигналов, например, сигналов предоставления, контрольных сигналов и т. п., и специфичный мобильному устройству модуль 925 для декодирования принятых данных/информации нисходящей линии связи, например, сигналов потока обмена нисходящей линии связи, предназначенных для отдельного WT 300 (или WT 801), которому принадлежит приемник 901.
Модуль 927 идентификации маякового сигнала идентифицирует принятый маяковый сигнал, обрабатываемый отдельным передатчиком сектора базовой станции, ассоциативно связанным с отдельной частотой несущей, используемой для его первичной сигнализации нисходящей линии связи. Каждый маяковый сигнал может быть, например, сигналом, занимающим время одиночного символа OFDM с полной или почти полной энергией передатчика сектора, концентрируемой в одном тоне. Вследствие характеристик маяковых сигналов OFDM модуль 927 идентификации маякового сигнала может идентифицировать маяковые сигналы без необходимости обрабатывать сигналы посредством модуля 922 временной синхронизации или модуля 923 декодера.
Детектор 926 качества сигнала включает в себя схему 928 измерения энергии сигнала и схему 930 SNR. Детектор 926 качества сигнала формирует оценки качества для разных каналов, с множества передатчиков соты/сектора базовой станции на WT 300, на основании измерений по принятым идентифицированным маяковым сигналам. Оценка качества основана на выходном сигнале схемы 928 измерения энергии сигнала и/или выходном сигнале схемы 930 SNR, который является функцией измеренной энергии сигнала. Информация 933, 935, 937 оценки качества сигнала, например, значения показателей качества, соответствующие каждому принятому идентифицированному маяковому сигналу, отправляются в контроллер 910 выбора полосы для использования при принятии решения выбора полосы.
Информация (933, 935, 937) о качестве компонента сигнала, отправленная из модуля 918 цифровой сигнальной обработки, используется контроллером 910 выбора полосы для принятия решения относительно настроек полосы частот несущей, которые должны использоваться модулем 902 РЧ-обработки, например, какая полоса и, соответственно, какой передатчик сектора базовой станции должны быть выбраны для приема передач нисходящей линии связи.
Приемник 901 по фиг.8 включает в себя интерфейс 907 I/O, присоединенный к модулю 918 цифровой сигнальной обработки и контроллеру 910 выбора полосы посредством шины 909, через которую различные элементы могут обмениваться данными и информацией. В других вариантах осуществления шина 509 может быть присоединена к другим компонентам приемника, например, цифровому фильтру 916. Приемник 901 может связываться с другими элементами WT 300 через интерфейс 907 I/O, который присоединяет приемник 901 к шине 312. Декодированные сигналы канала потока обмена нисходящей линии связи могут передаваться через интерфейс 907, например, на одно или более внешних устройств, таких как дисплей и/или другие компоненты WT.
На фиг.8 выходной сигнал контроллера 910 выбора полосы используется для управления модулем 902 РЧ-обработки. В других вариантах осуществления контроллер 910 выбора полосы может быть присоединен к цифровому фильтру 916 и/или модулю 918 цифровой сигнальной обработки, а выходной сигнал контроллера 910 выбора полосы может использоваться для управления цифровым фильтром 916 и/или модулем 918 цифровой сигнальной обработки. В таких случаях модуль 902 РЧ-обработки принимает и пропускает значительную часть принятого сигнала, например, многочисленные полосы, а цифровой фильтр 916 и/или модуль 918 цифровой сигнальной обработки выбирают часть принятого сигнала для дополнительной обработки и фильтрации или отбрасывают оставшуюся часть принятого сигнала в соответствии с управляющим сигналом или сигналами, принятыми из контроллера 910 выбора полосы.
Фиг.9 - чертеж 1000, иллюстрирующий примерную сигнализацию передатчика в соответствии с изобретением. Допустим, что есть примерный беспроводный терминал, например, WT 801, в примерной, с тремя секторами на соту, многосотовой системе 800 беспроводной связи по фиг.7, использующей полную BW системы в 5 МГц 1001. Допустим, что беспроводный терминал 801, например, мобильный узел в движении, в текущий момент расположен в системе 800, из условия, чтобы он мог принимать: некоторые сигналы с передатчика 1002 сектора С соты 1 базовой станции, некоторые сигналы с передатчика 1004 сектора В соты 2 базовой станции и некоторые сигналы с передатчика 1006 сектора соты 3 базовой станции. Допустим, что WT 801 предварительно был ближе всего к передатчику 1002, но теперь ближе всего к передатчику 1004.
Передатчик 1002 сектора С соты 1 BS передает сигналы 1020 нисходящей линии связи с использованием частоты f0 1008 несущей в пределах полосы 1010 BW 1,25 МГц. Сигналы 1020 включают в себя сигналы 1021 канала потока обмена нисходящей линии связи для WT, которые изображены небольшими прямоугольниками, и маяковый сигнал 1024, изображенный большим затушеванным прямоугольником. Маяковые сигналы были изображены большими по размеру, чем рядовые сигналы, чтобы проиллюстрировать, что маяковые сигналы обладают гораздо более высокой концентрацией энергии передачи в каждом тоне, чем рядовой сигнал, делая такие сигналы легкими для детектирования. Сигналы 1022 потока обмена нисходящей линии связи, например, сигнал OFDM расширенного спектра, предназначенные для отдельного интересуемого WT 801, были затушеваны. В дополнение, передатчик 1002 сектора С соты 1 BS передает сигналы 1026 нисходящей линии связи в полосе 1014 частот 1,25 МГц с частотой f1 1012 несущей. Сигналы 1026 нисходящей линии связи включают в себя маяковый сигнал 1028. Передатчик 1002 сектора С соты 1 BS также передает сигналы 1030 нисходящей линии связи в полосе 1018 частот 1,25 МГц с частотой f2 1016 несущей. Сигналы 1030 нисходящей линии связи включают в себя маяковый сигнал 1032. В этом примерном варианте осуществления маяковые сигналы (1024, 1028, 1032) и рядовая сигнализация (1021) передаются передатчиком 1002 в разные моменты времени. Большую часть времени передатчик 1002 передает рядовые сигналы 1021 нисходящей линии связи, но иногда, например, периодически, передатчик 1002 передает маяковый сигнал (1024, 1028 или 1032) вместо рядовой сигнализации, с полной или почти полной мощностью передачи сектора, концентрируемой в маяковом сигнале. Временная последовательность может быть построена из условия, чтобы передатчик 1002 периодически циклично повторял маяковые сигналы 1024, 1028, 1032.
Передатчик 1004 сектора B соты 2 BS передает сигналы 1038 нисходящей линии связи с использованием частоты f1 1012 несущей в пределах полосы 1014 BW 1,25 МГц. Сигналы 1038 включают в себя сигналы 1040 потока обмена нисходящей линии связи для WT, которые изображены небольшими прямоугольниками, и маяковый сигнал 1042, изображенный большим затушеванным прямоугольником. В дополнение, передатчик 1004 сектора B соты 2 BS передает сигналы 1034 нисходящей линии связи в полосе 1010 частот. Сигналы 1034 нисходящей линии связи включают в себя маяковый сигнал 1036. Передатчик 1004 сектора B соты 2 BS также передает сигналы 1044 нисходящей линии связи в полосе 1018 частот. Сигналы 1044 нисходящей линии связи включают в себя маяковый сигнал 1046. В этом примерном варианте осуществления маяковые сигналы (1036, 1042, 1046) и рядовая сигнализация (1040) передаются передатчиком 1004 в разные моменты времени. Большую часть времени передатчик 1004 передает рядовые сигналы 1040 нисходящей линии связи, но иногда, например, периодически, передатчик 1004 передает маяковый сигнал (1036, 1042 или 1046) вместо рядовой сигнализации, с полной или почти полной мощностью передачи сектора, концентрируемой в маяковом сигнале. Временная последовательность может быть построена из условия, чтобы передатчик 1004 периодически циклично повторял маяковые сигналы 1036, 1042, 1046.
Передатчик 1006 сектора А соты 3 BS передает сигналы 1056 нисходящей линии связи с использованием частоты f2 1016 несущей в пределах полосы 1018 BW 1,25 МГц. Сигналы 1056 включают в себя сигналы 1058 потока обмена нисходящей линии связи для WT, которые изображены небольшими прямоугольниками, и маяковый сигнал 1060, изображенный большим затушеванным прямоугольником. В дополнение, передатчик 1006 сектора А соты 3 BS передает сигналы 1048 нисходящей линии связи в полосе 1010 частот. Сигналы 1048 нисходящей линии связи включают в себя маяковый сигнал 1050. Передатчик 1006 сектора А соты 3 BS также передает сигналы 1052 нисходящей линии связи в полосе 1014 частот. Сигналы 1052 нисходящей линии связи включают в себя маяковый сигнал 1054. В этом примерном варианте осуществления маяковые сигналы (1050, 1054, 1060) и рядовая сигнализация (1058) передаются передатчиком 1006 в разные моменты времени. Большую часть времени передатчик 1006 передает рядовую сигнализацию 1058 нисходящей линии связи, но иногда, например, периодически, передатчик 1006 передает маяковый сигнал (1050, 1054 или 1060) вместо рядовой сигнализации, с полной или почти полной мощностью передачи сектора, концентрируемой в маяковом сигнале. Временная последовательность может быть построена из условия, чтобы передатчик 1006 периодически циклично повторял маяковые сигналы 1050, 1054, 1060.
В этом примерном варианте осуществления каждый из маяковых сигналов (1024, 1028, 1032, 1036, 1042, 1046, 1050, 1054, 1060) передается на одном и том же уровне мощности передачи. В других вариантах осуществления могут использоваться разные уровни мощности передачи для разных маяковых сигналов, при условии, что WT осведомлены о мощности передачи, заданной каждому маяковому сигналу, или осведомлены о соотношениях между уровнями мощности передачи, заданными разным маяковым сигналам.
Фиг.10 - чертеж 1100, иллюстрирующий примерный композитный сигнал 1002 на антенне приемника у приемника 801 беспроводного терминала и ассоциативно связанную информацию о частоте. Сигнал 1102 включает в себя компоненты 1104, 1106, 1108, 1110, 1112, 1114 и 1116. Компоненты 1104, 1108, 1112 и 1116 представляют шумовые сигналы вне интересуемых полос 1010, 1014, 1018 частот.
Сигналы 1106 представляют смешанную принятую копию сигналов 1020, 1034 и 1048, которые передавались в пределах полосы 1010 с частотой f0 1008 несущей; сигнал 1106 также включает в себя аддитивный шум. Переданные маяковый сигнал 1024 и рядовая сигнализация 1021, 1022 были умеренно уменьшены по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятые сигналы (1024', 1021', 1022'). Переданный маяковый сигнал 1036 был слегка уменьшен по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятый маяковый сигнал 1036'. Маяковый сигнал 1050 был значительно уменьшен по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятый маяковый сигнал 1050'. Подобно тому, что описано касательно фиг.9, сигналы 1024', 1022' и 1021', 1050' и 1036' по фиг.10 могут приниматься в разные моменты времени.
Сигналы 1110 представляют смешанную принятую копию сигналов 1026, 1038, 1052, которые передавались в пределах полосы 1014 с частотой f1 1012 несущей; сигнал 1110 также включает в себя аддитивный шум. Переданные маяковый сигнал 1042 и рядовая сигнализация 1040 были слегка уменьшены по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятые сигналы (1042', 1040'). Переданный маяковый сигнал 1028 был умеренно уменьшен по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятый маяковый сигнал 1028'. Переданный маяковый сигнал 1054 был значительно уменьшен по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятый маяковый сигнал 1054'.
Сигналы 1114 представляют смешанную принятую копию сигналов 1030, 1044, 1056, которые передавались в пределах полосы 1018 с частотой f2 1016 несущей; сигнал 1114 также включает в себя аддитивный шум. Переданный маяковый сигнал 1060 и рядовая сигнализация 1058 были значительно уменьшены по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятые сигналы (1060', 1058'). Переданный маяковый сигнал 1032 был умеренно уменьшен по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятый маяковый сигнал 1032'. Переданный маяковый сигнал 1046 был слегка уменьшен по амплитуде, например, вследствие коэффициента передачи канала, давая в результате принятый маяковый сигнал 1046'.
Фиг.11 - чертеж 1200, иллюстрирующий примерную обработку приемником 900 по фиг.8 примерного композитного принятого сигнала 1102 по фиг.10 в соответствии с настоящим изобретением. WT 801, включающий в себя приемник 900, в текущий момент присоединен к сектору 3 базовой станции 1, использующему передатчик 1002 для сигнализации потока обмена нисходящей линии связи, и поэтому модуль 902 РЧ-обработки управляется сигналом 1202 из контроллера 910 выбора полосы, чтобы выбирать полосу 1010 с частотой f0 1008 несущей. Модуль 902 РЧ-обработки извлекает основополосный сигнал 1106' из сигнала 1102, отфильтрованное представление информации, заключенной в сигналах 1106. Сигналы 1106' включают в себя рядовую сигнализацию 1021", рядовую сигнализацию 1022", направленную специально на WT 801, и маяковые сигналы 1024", 1036", 1050", соответствующие сигналам (1021', 1022', 1024', 1036', 1050') соответственно.
Стрелка 1206 представляет дополнительную обработку, например, фильтрацию полосы модулирующих частот, A/D-преобразование и цифровую фильтрацию, посредством компонентов 912, 914, 916 тракта приемника. Затем сигналы вводятся в модуль 918 цифровой сигнальной обработки. Модуль 927 идентификации маякового сигнала идентифицирует маяковый сигнал 1024" как являющийся ассоциативно связанным с передатчиком 1002 сектора С соты 1, который использует частоту f0 1008 несущей и полосу 1010 в качестве своей заданной полосы для передачи канала потока обмена нисходящей линии связи. Модуль 927 идентификации маякового сигнала идентифицирует маяковый сигнал 1036" как являющийся ассоциативно связанный с передатчиком 1004 сектора В соты 2, который использует частоту f1 1012 несущей и полосу 1014 в качестве своей заданной полосы для передачи канала потока обмена нисходящей линии связи. Модуль 927 идентификации маякового сигнала идентифицирует маяковый сигнал 1050" как являющийся ассоциативно связанным с передатчиком 1006 сектора А соты 3, который использует частоту f2 1016 несущей и полосу 1018 в качестве своей заданной полосы для передачи канала потока обмена нисходящей линии связи.
Информация об идентифицированном маяковом сигнале и маяковые сигналы 1024", 1036" и 1050" пересылаются в детектор 926 качества сигнала, где получаются информация о запасе энергии и/или информация о SNR, и формируется информация (933, 935, 937) оценки качества, соответствующая маяковым сигналам (1024", 1036", 1050"). В этом варианте осуществления OFDM идентификация маякового сигнала, измерения маякового сигнала и формирование информации о качестве сигнала выполняются без использования модуля временной синхронизации или необходимости декодировать модулированную информацию из маякового сигнала. В других вариантах осуществления информация может модулироваться по маяковым сигналам и может использоваться модуль декодирования широковещательного сигнала. В дополнение, в других вариантах осуществления при формировании значений оценки качества может учитываться дополнительная информация. Например, частоты появления ошибок в декодированной информации по принятым рядовым сигналам 1022", например, сигналам канала потока обмена нисходящей линии связи, предназначенных для отдельного WT 801, может учитываться при оценке качества канала, соответствующего маяковому сигналу 1024". В дополнение, в тех случаях, когда разные детектированные маяковые сигналы могут соответствовать одной и той же несущей, например, из другой соты, отношения между маяковыми сигналами могут использоваться при определении уровней помех.
Информация 1 933 оценки качества основана на оценках энергии и/или SNR обработанного маякового сигнала 1024" и соответствует передатчику 1002, использующему частоту f0 несущей. Информация 2 935 оценки качества основана на оценках энергии и/или SNR обработанного маякового сигнала 1036" и соответствует передатчику 1004, использующему частоту f1 несущей. Информация 1 937 оценки качества основана на оценках энергии и/или SNR обработанного маякового сигнала 1050" и соответствует передатчику 1006, использующему частоту f2 несущей.
Контроллер выбора полосы принимает информацию 933, 935 и 937, делает вывод, что качество канала 2 является лучшим, чем качество канала 1, которое лучше, чем качество канала 3, и что WT 801 должен поменять точку своего присоединения. В надлежащий момент времени, например, чтобы минимизировать перерыв в обслуживании, контроллер 910 выбора полосы отправляет сигнал 1202' в модуль 902 РЧ-обработки, чтобы поменять выбор на частоту f1.
Фиг.12 - чертеж 1300, иллюстрирующий примерную сигнализацию передатчика после того, как WT 801 изменил свой выбор полосы и точку присоединения. WT 801 может принимать некоторые сигналы от передатчика 1002 сектора С соты 1 BS, некоторые сигналы с передатчика 1004 сектора В BS 2 и некоторые сигналы с передатчика 1006 сектора BS 3. Допустим, что WT 801 предварительно был ближе всего к передатчику 1002, но теперь ближе всего к передатчику 1004.
Передатчик 1002 сектора С соты 1 BS передает сигналы 1320 нисходящей линии связи с использованием частоты f0 1008 несущей в пределах полосы 1010. Сигналы 1320 включают в себя сигналы 1321 потока обмена нисходящей линии связи для WT, которые изображены небольшими прямоугольниками, и маяковый сигнал 1024, изображенный большим затушеванным прямоугольником. В дополнение, передатчик 1002 сектора С соты 1 BS передает сигналы 1326 нисходящей линии связи в полосе 1014 частот с частотой f1 1012 несущей. Сигналы 1326 нисходящей линии связи включают в себя маяковый сигнал 1028. Передатчик 1002 сектора С соты 1 BS также передает сигналы 1330 нисходящей линии связи в полосе 1018 частот с частотой f2 1018 несущей. Сигналы 1330 нисходящей линии связи включают в себя маяковый сигнал 1032.
Передатчик 1004 сектора B соты 2 BS передает сигналы 1338 нисходящей линии связи с использованием частоты f1 1012 несущей в пределах полосы 1014. Сигналы 1338 включают в себя сигналы 1340 потока обмена нисходящей линии связи для WT, которые изображены небольшими прямоугольниками, в том числе сигналы 1341 потока обмена нисходящей линии связи для отдельного WT 801, изображенные небольшими прямоугольниками с затемнением, и маяковый сигнал 1042, изображенный большим затушеванным прямоугольником. В дополнение, передатчик 1004 сектора B соты 2 BS передает сигналы 1334 нисходящей линии связи в полосе 1010 частот. Сигналы 1034 нисходящей линии связи включают в себя маяковый сигнал 1036. Передатчик 1004 сектора B соты 2 BS также передает сигналы 1344 нисходящей линии связи в полосе 1018 частот. Сигналы 1344 нисходящей линии связи включают в себя маяковый сигнал 1046.
Передатчик 1006 сектора А соты 3 BS передает сигналы 1356 нисходящей линии связи с использованием частоты f2 1016 несущей в пределах полосы 1018. Сигналы 1356 включают в себя сигналы 1358 потока обмена нисходящей линии связи для WT, которые изображены небольшими прямоугольниками, и маяковый сигнал 1060, изображенный большим затушеванным прямоугольником. В дополнение, передатчик 1006 сектора А соты 3 BS передает сигналы 1348 нисходящей линии связи в полосе 1010 частот. Сигналы 1348 нисходящей линии связи включают в себя маяковый сигнал 1050. Передатчик 1006 сектора А соты 3 BS также передает сигналы 1352 нисходящей линии связи в полосе 1014 частот. Сигналы 1352 нисходящей линии связи включают в себя маяковый сигнал 1054.
Фиг.13 - чертеж 1400 примерного маякового сигнала 1420 с временным сдвигом 1418 относительно смежного сектора, проиллюстированный в целях дополнительного пояснения признаков изобретения. Фиг.13 включает в себя примерный WT 1402, реализованный в соответствии с настоящим изобретением, например, WT 801 по фиг.7. Допустим, что примерная система является системой OFDM расширенного спектра со скачкообразным переключением частоты, использующей маяковую сигнализацию в соответствии с настоящим изобретением. Допустим, что временная шкала 1404 представляет время в приемнике 1402 WT, что WT 1402 в текущий момент присоединен к передатчику сектора С BS 1, чья полоса частот несущей в текущий момент является используемой для сигнализации канала потока обмена нисходящей линии связи, и что WT 1402 обладает синхронизированными временными характеристиками символа OFDM по отношению к передатчику сектора С BS 1. Три следующих один за другим временных интервала (1406, 1408, 1410) символа OFDM показаны для передачи информации передатчика сектора С BS 1. Подобным образом три следующих один за другим временных интервала (1412, 1414, 1416) символа OFDM показаны для передачи информации передатчика сектора В BS 2. Каждый временной интервал (1406, 1408, 1410, 1412, 1414, 1416) символа OFDM приблизительно занимает одну и ту же длительность; однако есть сдвиг 1418 10% между началом временного интервала символа OFDM сектора С BS 1 и началом временного интервала символа OFDM сектора В BS 2. Этот временной сдвиг мог быть, например, из-за рассогласованностей между времязадающими генераторами базовых станций, такими как разные начальные моменты точного времени и/или рассогласованности, обусловленные разными расстояниями между WT 1402 и передатчиком каждой базовой станции.
Маяковый сигнал 1420 OFDM сектора В соты 2 BS был передан на WT 1402, как показано стрелкой 1422. В течение временного интервала 1414 маяковый сигнал 1420 OFDM сектора В соты 2 BS присутствует в приемнике 1402 WT. Однако, так как WT присоединен и синхронизирован относительно передатчика сектора С BS 1, WT 1402 детектирует только 90% энергии маякового сигнала 1420, например, он теряет последние 10% сигнала. Однако этот относительно высокий уровень детектирования энергии и относительно малая величина ассоциативно связанной неопределенности, во многих случаях, достаточна в отношении поддержания сравнения маяковых сигналов из смежной соты и/или секторов. В соответствии с изобретением во многих вариантах осуществления OFDM приемнику не требуется повторно синхронизировать приемник касательно временных характеристик для каждого обрабатываемого маякового сигнала.
Фиг.14 - изображение 1400 примерного WT 1400, реализованного в соответствии с одним из примерных вариантов осуществления настоящего изобретения. Фиг.14 включает в себя мобильное устройство 1401 приемника и мобильное устройство 1402 передатчика, соединенные через шину 1404. Шина 1404 также присоединена к процессору WT, памяти и устройствам I/O, посредством которых различные элементы могут обмениваться данными и информацией. Приемник 1401 включает в себя модуль 1410 РЧ-обработки, модуль 1412 фильтрации полосы модулирующих частот, модуль 1414 A/D, модуль 1416 обработки принятого беспроводным терминалом сигнала и интерфейс 1418 I/O. Модуль 1410 РЧ-обработки включает в себя модуль 1422 РЧ-фильтрации, например, управляемый фильтр полосы пропускания. Модуль 1410 РЧ-обработки присоединен к приемной антенне 1406, через которую приемник 1401 может принимать множество сигналов нисходящей линии связи, в том числе маяковые сигналы из множества точек присоединения секторов BS, например, разных сот, разных секторов и/или с использованием разных несущих рядовой сигнализации. Принятые маяковые сигналы с передатчиков, которые используют разные несущие для передачи пользовательских данных, в соответствии с изобретением будут попадать в пределы той же самой полосы несущей, на которую настроен модуль 1422 РЧ-фильтрации (фильтр полосы пропускания), тем самым избегая необходимости настраивать РЧ-полосу для приема маяковых сигналов с передатчиков, использующих разные полосы частоты для передач пользовательских данных. То есть, как обсуждалось выше, передатчики передают маяковые сигналы не только в полосе частот, которую они используют для передачи пользовательских данных, но и в полосах частот соседних секторов, сот или других несущих, используемых в том же секторе. В дополнение к маяковым сигналам из сот и/или секторов, с которыми беспроводный терминал не имеет установленной линии связи, модуль 1410 РЧ-обработки также может принимать маяковые сигналы из точки сетевого присоединения, которую он продолжает использовать в качестве текущей точки присоединения. Сигнализация пользовательских данных/информации и управления, такая как контрольные сигналы, сигналы управления синхронизацией и регулирования мощности, также может приниматься с передатчика в текущей точке сетевого присоединения, так как эти сигналы будут передаваться в полосе частот, на которую настроен модуль 1410 РЧ-обработки.
Выходные сигналы из модуля 1410 РЧ-обработки служат в качестве входного сигнала для фильтра 1412 полосы модулирующих частот, который выполняет аналоговую фильтрацию. Затем отфильтрованный сигнал вводится в модуль 1414 A/D-преобразователя, где отфильтрованный аналоговый сигнал преобразуется в цифровой сигнал, который вводится в модуль 1416 обработки принятого беспроводным терминалом сигнала.
Модуль 1416 обработки принятого беспроводным терминалом сигнала, приняв цифровой сигнал, выполняет ДПФ (дискретное преобразование Фурье, DFT) или БПФ (быстрое преобразование Фурье, FFT), выполняет оценку энергии, выполняет детектирование маякового сигнала, например, на основании уровней энергии тонов, превышающих пороговое значение, выполняет детектирование символа, например, рядовой сигнализации, такой как предоставления, определяет передатчик, ассоциативно связанный с каждым детектированным маяковым сигналом, оценивает и определяет точку сетевого присоединения для использования на основании сравнений энергии маяковых сигналов и инициирует запросы эстафетной передачи обслуживания, когда он определяет, что должна использоваться другая точка сетевого присоединения. Сигнал 1420 выбора полосы, выведенный из модуля 1416 обработки принятого беспроводным терминалом сигнала, вводится в РЧ-фильтр 1422 и управляет выбором полосы несущей, на которую настроен приемник 1401, и моментом времени, в который происходит переключение.
Сигнал 1424, например запрос эстафетной передачи обслуживания на новую точку присоединения сектора BS, отправляется из модуля 1416 обработки принятого беспроводным терминалом сигнала через его интерфейс 1418 I/O по шине 1404 WT, на интерфейс 1426 I/O модуля передатчика, когда модуль 1416 определяет, что должна быть выполнена эстафетная передача обслуживания. Модуль 1402 передатчика присоединен к передающей антенне 1408, через которую WT может передавать сигналы восходящей линии связи с использованием текущей беспроводной линии связи. Сигналы восходящей линии связи могут включать в себя запрос в текущую точку сетевого присоединения, например, сектор BS, инициировать эстафетную передачу обслуживания на новую точку сетевого присоединения, выбранную на основании принятого маякового сигнала. Управляющий сигнал выбора полосы, выведенный модулем 1416 обработки принятого беспроводным терминалом сигнала, подается в модуль 1402 передатчика. Этот сигнал может использоваться для переключения полосы несущей передатчика и приемника на полосу, соответствующую новой точке присоединения сектора BS, например, непосредственно перед моментом времени, соответствующим заданному выделенному сегменту восходящей линии связи, соответствующему новой частоте несущей, которая может использоваться для регистрации новой точкой присоединения.
Фиг.15 - изображение примерного модуля 1500 обработки принятого беспроводным терминалом сигнала, реализованного в соответствии с вариантом осуществления настоящего изобретения. Модуль обработки принятого WT сигнала может быть примерным вариантом осуществления модуля 1416 по фиг.14. Примерный модуль 1500 обработки принятого WT сигнала включает в себя модуль 1502 преобразования Фурье, например, дискретного преобразования Фурье и/или быстрого преобразования Фурье (ДПФ/БПФ), модуль 1504 оценки энергии, модуль 1506 детектирования символа, модуль 1508 детектирования порогового уровня энергии, модуль 1510 определения порогового значения, модуль 1512 сетевого управления, модуль 1514 определения информации о передатчике, модуль 1516 определения присоединения сетевой точки и модуль 1570 контроллера эстафетной передачи обслуживания.
Модуль 1502 ДПФ/БПФ принимает в качестве входного сигнала принятый сигнал 1518, например, сигнал в первом периоде времени, таком как временной период передачи символа OFDM, упомянутый сигнал включает в себя множество тонов сигнала, например, 113 тонов в одном из вариантов осуществления. Каждый тон сигнала соответствует разной частоте в пределах полосы частот нисходящей линии связи. Модуль 1502 ДПФ/БПФ выполняет БПФ или ДПФ над принятым сигналом 1518, чтобы сформировать и вывести множество отдельных компонентов (1520, 1522, 1524, ..., 1526) сигнала, каждый компонент (1520, 1522, 1524, ..., 1526) сигнала соответствует разной частоте принятого сигнала. Таким образом, модуль 1502 используется для выполнения операции время-частотного преобразования сигнала. Компоненты (1520, 1522, 1524, ..., 1566) сигнала, выводимые из модуля 1502 ДПФ/БПФ, вводятся в модуль 1504 оценки энергии и модуль 1506 детектирования символа.
Модуль 1504 оценки энергии выполняет оценку энергии над каждым из компонентов (1520, 1522, 1524, ..., 1526) сигнала, формируя и выводя соответствующий набор значений (1528, 1530, 1532, ..., 1534) энергии, каждая оценка энергии соответствует разной частоте. Модуль 1506 детектирования символа детектирует и выводит символы 1536, например, символы модуляции, переносящие пользовательские данные, например, текст, аудио или видео и т.п., и/или управляющие данные.
Значения (1528, 1530, 1532, ..., 1534) энергии вводятся в модуль 1510 определения порогового значения и модуль 1508 детектирования порогового уровня энергии. Модуль 1510 определения порогового значения включает в себя схему 1560 усреднения и преобразователь 1562 масштаба. Схема 1560 усреднения принимает значения (1528, 1530, 1532, ..., 1534) энергии и определяет среднюю почастотную энергию принятого сигнала. Выходной сигнал схемы 1560 усреднения вводится в преобразователь 1562 масштаба, который приводит определенную усредненную энергию к масштабу посредством множителя, большего чем четырежды, например, 5, 20, 99, 150 или более раз, в зависимости от конкретного варианта осуществления, формируя выходной сигнал 1538 порогового уровня. Сигнал 1538 порогового уровня вводится в модуль 1008 детектирования порогового уровня энергии.
Модуль 1508 детектирования порогового уровня энергии сравнивает каждое из значений (1528, 1530, 1532, ..., 1534) энергии компонентов с пороговым уровнем 1538. Когда одно из компонентов (1528, 1530, 1532, ..., 1534) значений энергии превышает пороговый уровень 1538, модуль детектирования порогового уровня энергии формирует и выводит сигнал 1540 признака маякового сигнала. Модуль 1508 детектирования также формирует и выводит информационный сигнал 1542 о энергии/частоте маякового сигнала, который предоставляет информацию, указывающую частоту детектированного компонента маякового сигнала, например, тона, и детектированный уровень энергии тона.
Сигнал 1540 признака маякового сигнала, указывающий наличие детектированного маякового сигнала, вводится в модуль 1512 управления, запускающий управляющий сигнал 1544 в модуль 1514 определения информации о передатчике и управляющий сигнал 1546 в модуль 1516 определения точки сетевого присоединения. Управляющие сигналы (1544, 1546) инициируют действие и управляют процессом обработки маяковых сигналов в модулях (1514, 1516) соответственно в ответ на детектированный маяковый сигнал.
Модуль 1514 определения информации о приемнике включает в себя информацию об энергии, детектированной в маяковом сигнале, которая хранится в информации 1564 энергии, информацию о частоте детектированного маякового сигнала, которая хранится в информации 1566 частоты, и информацию по возможным маяковым сигналам 1568, например, сохраненную информацию о местоположении частоты, на которой будут появляться маяковые сигналы, передаваемые разными точками сетевого присоединения. Модуль 1544 определения информации о приемнике принимает информационный сигнал 1542 энергии/частоты маякового сигнала, сохраняет уровень энергии, соответствующий принятому маяковому сигналу, в информации 1564 энергии и сохраняет информацию частоты, например, идентификацию тона, соответствующую высокому уровню энергии, в информации 1566 частоты. Информация о возможных маяковых сигналах 1568 включает в себя, например, ожидаемую частоту и/или периодичность и информацию о приемнике, соответствующую возможным маяковым сигналам. Модуль 1514 определения информации о приемнике сравнивает информацию по принятому маяковому сигналу, в том числе, информацию 1566 частоты, с информацией возможных маяковых сигналов 1568, чтобы определить информацию о приемнике, который передавал маяковый сигнал, например, секторе, соте или частоте несущей, используемой в секторе или соте, из которых передавался детектированный маяковый сигнал. Модуль 1514 определения информации о передатчике выводит информационные сигналы, соответствующие детектированному маяковому сигналу, в модуль 1516 определения точки сетевого присоединения. Например, выведенные информационные сигналы могут включать в себя информацию 1548 мощности, информацию 1550 частоты, информацию 1552 идентификации соты, информацию 1554 идентификации сектора и/или информацию 1556 идентификации несущей. В некоторых вариантах осуществления маяковые сигналы разных моментов времени переносят разную информацию.
Модуль 1516 определения точки сетевого присоединения включает в себя множество наборов информации маяковых сигналов (информацию 1558 маякового сигнала 1, информацию 1560 маякового сигнала n). Каждый набор информации (1558, 1560) маяковых сигналов соответствует принятому маяковому сигналу, и набор определенной информации включает в себя по меньшей мере некоторые из информации 1548 мощности, информации 1550 частоты, информации 1552 ID соты, информации 1554 ID сектора и информации 1556 ID несущей или информацию, выведенную из информации (1548, 1550, 1552, 1554, 1556). Модуль 1516 определения точки сетевого присоединения ассоциативно связывает каждый набор информации (1558, 1560) маяковых сигналов с точкой сетевого присоединения в системе связи, например, отдельным передатчиком сектора базовой станции, использующим конкретную частоту несущей, и его соответствующим приемником. Модуль 1516 определения точки сетевого присоединения сравнивает информацию (1558, 1560) маяковых сигналов для разных точек сетевого присоединения и принимает решение касательно эстафетных передач обслуживания с одной точки сетевого присоединения на другую точку сетевого присоединения. Возможны различные типы эстафетных передач обслуживания в соответствии с настоящим изобретением, в том числе внутрисотовые эстафетные передачи обслуживания, межсотовые эстафетные передачи обслуживания и/или эстафетные передачи обслуживания в пределах несущей. Например, в некоторых вариантах осуществления модуль 1516 определения точки сетевого присоединения инициирует запрос эстафетной передачи обслуживания на другую точку сетевого присоединения, когда маяковый сигнал, ассоциативно связанный с другой точкой сетевого присоединения, обладает большим значением энергии, чем маяковый сигнал, ассоциативно связанный с текущей точкой сетевого присоединения. Возможны многочисленные варианты у последовательности операций принятия решения эстафетной передачи обслуживания в соответствии с настоящим изобретением. Например, в некоторых вариантах осуществления уровни энергии маякового сигнала многочисленных маяковых сигналов из точки сетевого присоединения могут фильтроваться по времени, например, усредняться, перед тем как выполняется сравнение для принятия решения эстафетной передачи обслуживания. В некоторых вариантах осуществления запасы разности между текущим и потенциально возможным маяковыми сигналами точки присоединения могут измеряться и сравниваться с критериями эстафетной передачи обслуживания, используемыми для определения, существует ли достаточная разность в уровнях мощности для оправдания эстафетной передачи обслуживания. В некоторых вариантах осуществления минимально приемлемые уровни энергии маяковых сигналов могут использоваться и учитываться в решениях эстафетной передачи обслуживания, например, маяковые сигналы ниже предварительно выбранного уровня энергии не рассматриваются в качестве кандидатов эстафетной передачи обслуживания.
Когда модуль 1516 определения точки сетевого присоединения решает, на основании информации энергии компонента маякового сигнала, запросить эстафетную передачу обслуживания на другую точку сетевого присоединения, например, в другой соте, в другом секторе или в том же самом секторе, использующем другую частоту, модуль 1516 отправляет сигнал 1562 выбора точки присоединения в контроллер 1570 эстафетной передачи обслуживания. Контроллер 1570 эстафетной передачи обслуживания управляет работой WT касательно процесса эстафетной передачи обслуживания. Контроллер 1570 эстафетной передачи обслуживания включает в себя модуль 1572 контроллера выбора полосы. Контроллер 1570 эстафетной передачи обслуживания принимает сигнал 1562 выбора точки присоединения, например, сигнал, запрашивающий замены по точке сетевого присоединения на новую точку сетевого присоединения, соответствующую детектированному маяковому сигналу. Согласно принятому запросу замены контроллер 1570 эстафетной передачи обслуживания формирует сигнал 1576 запроса эстафетной передачи обслуживания, направленный в модуль передатчика WT. Сигнал 1576 запроса эстафетной передачи обслуживания должен передаваться в виде сигнала восходящей линии связи по текущей эфирной линии связи в текущую точку сетевого присоединения сектора BS и пересылаться в точку сетевого присоединения сектора BS, выбранной для обслуживания в качестве новой точки сетевого присоединения. Для запроса внутрисотовой эстафетной передачи обслуживания пересылка между текущей из запрашиваемой точкой сетевого присоединения сектора BS происходит через линию связи транзитного соединения, тогда как для запроса межсотовой эстафетной передачи обслуживания или внутрисекторной эстафетной передачи обслуживания в пределах несущей пересылка и сигнализация является внутренней по отношению к BS.
В принятый детектированный символ 1536 включены сигналы предоставлений и т.п., такие как, например, предоставления запрошенной точкой сетевого присоединения сектора BS выделенных ресурсов, например, идентификаторов и/или выделенных сегментов линии связи, для WT, которые должны использоваться при регистрации новой точкой сетевого присоединения. Выделения передаются WT через текущую установленную беспроводную линию связи. Выделенный сегмент восходящей линии связи, например, выделенный сегмент доступа, являющийся набором тонов в течение заданных временных интервалов передачи OFDM, по отношению к маяковому сигналу, соответствующему запрошенной точке сетевого присоединения, которая должна использоваться WT, используется при установлении новой беспроводной линии связи на новую точку сетевого присоединения. Например, в случае межсотовой эстафетной передачи обслуживания выделенный сегмент восходящей линии связи используется для отправки сигнала управления временными характеристиками и/или мощностью восходящей линии связи, который должен использоваться новой точкой сетевого присоединения сектора BS для формирования сигналов регулировки временных характеристик и/или мощности, которые должны отправляться на WT для подстройки его сигнализации восходящей линии связи.
Контроллер 1570 эстафетной передачи обслуживания принимает предоставления 1574 выделенных ресурсов из новой запрошенной точки присоединения сектора BS, использует информацию временного и/или информационного обрамления линии связи, соответствующую новой точке присоединения сектора, например, информацию о том, какие тоны используются, для каких типов данных и в течение каких временных интервалов, и использует временные соотношения между маяковым сигналом, ассоциативно связанным с новой точкой присоединения сектора BS, и выделенным сегментом заданной восходящей линии связи, чтобы решать, когда завершить старую беспроводную линию связи, переключиться на новую полосу частот, при условии, что новая точка присоединения сектора BS использует другую полосу частот, нежели текущая точка присоединения сектора BS, и устанавливает новую беспроводную линию связи с новой точкой присоединения сектора BS. Контроллер 1572 выбора полосы формирует сигнал 1578 выбора полосы в надлежащий момент времени. Сигнал 1572 выбора полосы отправляется в модуль РЧ-обработки приемника с одиночным трактом для переключения полос.
Фиг.16, содержащая комбинацию фиг.16А и фиг.16В, является блок-схемой 1600 последовательности операций примерного способа управления беспроводным терминалом (WT), например, мобильным узлом, таким как WT 300, который может использоваться в примерной системе связи мультиплексирования с ортогональным частотным разделением каналов (OFDM), в соответствии с настоящим изобретением. Действие начинается на этапе 1602, где WT запитывается и инициализируется для приема сигналов нисходящей линии связи с базовых станций. Действие переходит с этапа 1602 на этап 1604. На этапе 1604 WT управляется, чтобы принимать сигнал, соответствующий первой полосе частот, которая включает в себя множество тонов в первом периоде времени. Сигнал включает в себя множество тонов сигнала, которые могут нести или могут не нести информацию, например, никакая мощность могла бы не передаваться в некоторых из тонов. Тоны сигнала могут включать в себя пользовательские данные, управляющие сигналы и/или маяковые сигналы. Маяковые сигналы могли бы передаваться передатчиком, например, передатчиком сектора базовой станции, который WT использует в качестве сетевой точки присоединения и с которого принимает пользовательские данные или с другого передатчика, например, передатчика, соответствующего смежному сектору, соте или другой частоте несущей в том же секторе, из которого WT принимает пользовательские данные и который служит в качестве текущей точки сетевого присоединения WT. Таким образом, в то время как маяковый сигнал принимается в текущей полосе частот WT, он может фактически соответствовать передатчику, который использует частоту несущей вне текущей полосы частот для передачи и приема пользовательских данных, например, текста, аудио, видео и т.п., упомянутый сигнал, возможно, включает в себя маяковый сигнал. В некоторых вариантах осуществления первый период времени является периодом времени передачи символа. Многочисленные символы могут приниматься на разных тонах, например, по одному на тон, заключенных в сигнале, принятом на этапе 1604. Действие переходит с этапа 1604 на этап 1606.
На этапе 1606 WT управляется, чтобы выполнять времячастотное преобразование упомянутого принятого сигнала для формирования набора компонентов сигнала, соответствующих разным тонам сигнала в первой полосе частот. Выходной сигнал обычно будет включать в себя один компонент сигнала для каждого тона в первой полосе частот, которая используется, в некоторый момент времени, для передачи компонента маякового сигнала или символа, передающего пользовательские данные или управляющую информацию. В некоторых вариантах осуществления WT использует дискретное преобразование Фурье (ДПФ) при выполнении времячастотного преобразования, тогда как в других вариантах осуществления WT использует быстрое преобразование Фурье при выполнении времячастотного преобразования.
Затем на этапе 1608 WT определяет энергию каждого из множества разных компонентов сигнала, которые соответствуют разным частотам в пределах упомянутой первой полосы частот, для формирования набора значений посигнальной энергии тонов, каждое значение посигнальной энергии тона соответствует разному тону. Это может делаться с использованием любой из большого количества хорошо известных технологий измерения энергии сигналов. В случаях, где пороговое значение детектирования маякового сигнала формируется динамически по одному или более принятым сигналам, действие переходит с этапа 1608 на этап 1612, который является этапом формирования порогового значения. Действие также переходит с этапа 1608 на этап 1610, где выполняется обработка принятого сигнала для обнаружения наличия маякового сигнала.
Этап 1612 является необязательным этапом, используемым в различных вариантах осуществления, которые используют динамически сформированное пороговое значение для детектирования тонов маякового сигнала. На этапе 1612 WT формирует пороговое значение по меньшей мере по одному принятому сигналу. Этап 1612 включает в себя подэтапы 1614, 1616, 1618 и, необязательно, подэтап 1620. На подэтапе 1614 WT суммирует полную энергию по набору значений посигнальной энергии тонов, полученному на этапе 1608. Например, если первая полоса частот включала в себя X тонов, где X является превышающим 100 в некоторых, но необязательно всех, вариантах осуществления, энергия X тонов должна суммироваться вместе, чтобы сформировать оценку полной энергии сигнала у принятого сигнала. Затем на подэтапе 1616 WT делит определенную сумму энергии по этапу 1614 на количество тонов, например, X, в принятом сигнале, например, получая среднее значение потоновой энергии. Действие переходит с подэтапа 1616 на подэтап 1618, где WT управляется, чтобы масштабировать результат этапа 1616 посредством множителя, большего чем 4, например, 5, 6, 10, 20, 100 или большей кратности, в зависимости от реализации, чтобы получить пороговое значение.
В некоторых вариантах осуществления действие переходит с подэтапа 1618 прямо на этап 1610, где сформированное пороговое значение используется. В других вариантах осуществления действие переходит с подэтапа 1618 на подэтап 1620, где выполняется операция усреднения. На подэтапе 1620 WT управляется, чтобы объединять, например, усреднять пороговое значение по этапу 1618 с использованием предварительно сформированных пороговых значений, получая отфильтрованное пороговое значение. В некоторых вариантах осуществления динамически сформированное пороговое значение формируется из сигналов, в том числе по меньшей мере одного принятого сигнала, который принимался в периоде времени передачи символа OFDM, превышающем первый период времени. Пороговое значение, выведенное с этапа 1618 или этапа 1620, используется на этапе 1610.
В одном из примерных вариантов осуществления, в котором этап 1620 пропускается, динамически сформированное пороговое значение определяется основанным на принятом сигнале в течение первого периода времени, например, того же периода времени передачи символа OFDM, в котором детектировался маяковый сигнал, и не основан на предыдущих периодах времени передачи символа OFDM.
В некоторых вариантах осуществления этап 1612 динамического формирования порогового значения опущен, а этап 1610 использует постоянное пороговое значение, например, хранимое значение. В некоторых вариантах осуществления хранимое постоянное пороговое значение является одним из множества сохраненных пороговых значений. В одном из таких вариантов осуществления WT может начинать работу с использованием наивысшего хранимого значения из набора хранимых пороговых значений в продолжение предопределенного количества времени, и если не обнаружен маяковый сигнал, то выбранное хранимое значение по пороговым значениям может изменяться, например, понижаться поэтапно со временем до тех пор, пока не обнаружен маяковый сигнал.
Обращаясь к этапу 1610, на этапе 1610 WT управляется, чтобы сравнивать определенную энергию каждого из упомянутого множества разных компонентов сигнала с пороговым уровнем энергии маякового сигнала, который определен на этапе 1612 или который является предварительно выбранным значением. Пороговое значение детектирования маякового сигнала является большим, чем средняя потоновая энергия сигнала упомянутого принятого сигнала. Действие переходит с этапа 1610 на этап 1622.
На этапе 1622 WT определяет, указывает ли какое-нибудь из сравнений по этапу 1610, что пороговый уровень был превышен, указывая, что был детектирован компонент маякового сигнала в тоне, обладающем значением энергии, превышающим пороговое значение. Если пороговый уровень был превышен в отношении по меньшей мере одного компонента сигнала, действие переходит с этапа 1622 на соединительную вершину B 1626. Однако, если пороговое значение не было превышено, действие переходит на соединительную вершину A 1624.
С соединительной вершины B 1626 действие продолжается на этапах 1630 и 1632. На этапе 1630 WT управляется, чтобы идентифицировать тоны, обладающие уровнями энергии, не превышающими пороговое значение, как информационные/управляющие тоны, тогда как на этапе 1632 WT идентифицирует тоны, включающие в себя по меньшей мере один тон, обладающий уровнем энергии, превышающим пороговое значение, как тон маякового сигнала. Действие переходит с этапа 1630 на этап 1634, где обрабатываются тоны, не превышающие пороговое значение маякового сигнала.
С соединительной вершины А 1624 действие переходит на этап 1628, где WT управляется, чтобы идентифицировать полный набор сравненных тонов в качестве информационных/управляющих тонов. Действие переходит с этапа 1628 на этап 1634.
На этапе 1634 WT управляется, чтобы детектировать символы OFDM, например, символы модуляции OFDM, включенные в упомянутый принятый сигнал, по идентифицированным информационным/управляющим тонам. Это обычно вовлекает использование синхросигнала, который был синхронизирован с временными характеристиками символа базовой станции, которая передавала информационные/управляющие тоны, например, тактового генератора, синхронизированного с текущей точкой сетевого присоединения. Информационные/управляющие тоны могут передавать пользовательские данные, возникшие из других WT, с которыми принимающий WT имеет сеанс связи через сетевую точку присоединения, информацию канала регулирования мощности, информацию управления временными характеристиками, информацию предоставления и/или информацию подтверждения.
Обращаясь к этапу 1632, действие переходит с этапа 1632 на этап 1636, где WT управляется, чтобы формировать сигнал признака, указывающий наличие маякового сигнала или сигналов. Действие переходит с этапа 1636 на этап 1638. На этапе 1638 WT управляется, чтобы сохранять информацию об определенных энергии и частоте, соответствующих идентифицированному тону маякового сигнала. На этапе 1640 WT определяет частоту несущей, соответствующую детектированному маяковому сигналу, например, на основании частоты маякового сигнала. Он также может определять ID сектора и ID соты по частоте, соответствующей тону маякового сигнала. Действие переходит с этапа 1640 на этап 1642. На этапе 1642 WT сохраняет определенную информацию идентификации, соответствующую принятому сигналу и идентифицированному тону маякового сигнала. Действие переходит с этапа 1642 на этап 1644 и этап 1646. Так как детектирование и интерпретация маякового сигнала преимущественно основаны на частоте компонента или компонентов, например, тонов, принятого маякового сигнала и/или интервале, в котором маяковые сигналы принимаются на конкретных частотах, информация о передатчике может быть получена из маякового сигнала, без вынуждения WT добиваться или поддерживать синхронизацию временных характеристик символа с передатчиком маяковых сигналов.
На этапе 1644 WT управляется, чтобы начать обработку другого сигнала в следующем временном интервале, например, периоде передачи символа. Действие переходит с этапа 1644 через соединительную вершину С 1650 на этап 1604 для приема и обработки следующего принятого сигнала, например, в течение следующего интервала символа OFDM.
На этапе 1646 WT управляется, чтобы проверять, было ли детектировано по меньшей мере два маяковых сигнала и сохранена ли информация, соответствующая разным передатчикам, например, другой соте, сектору или передатчикам в пределах сектора, которые используют другие частоты несущих. Если маяковые сигналы, соответствующие другим передатчикам, были детектированы, то действие переходит на этап 1648, где WT управляется, чтобы определять, какой сектор базовой станции использовать в качестве сетевой точки присоединения, на основании сравнения энергии, ассоциативно связанной с компонентами сигнала, соответствующими разным детектированным маяковым сигналам. Например, на этапе 1648 WT может выбирать точку присоединения, соответствующую маяковому сигналу, ассоциативно связанному с наивысшим уровнем энергии. Выбор может быть обусловлен различными критериями эстафетной передачи обслуживания, чтобы предотвратить частое и/или излишнее переключение между частотами. Например, уровню мощности компонента или компонентов маякового сигнала, ассоциативно связанных с конкретной рассматриваемой точкой присоединения, может потребоваться превышать уровень мощности маякового сигнала, ассоциативно связанного с другой сетевой точкой присоединения, на протяжении предопределенного времени до того, как выбрана сетевая точка присоединения, которая является отличной от текущей сетевой точки присоединения.
Действие переходит с этапа 1648 на этап 1650, где выбранная точка сетевого присоединения сравнивается с текущей точкой сетевого присоединения. Если они являются разными, указывая необходимость в эстафетной передаче обслуживания, действие переходит на этап 1652, на котором WT инициирует эстафетную передачу обслуживания на вновь выбранную точку присоединения. В некоторых вариантах осуществления это влечет отправку одного или более сигналов через текущую сетевую точку присоединения в новую сетевую точку присоединения и прием, через текущую точку присоединения, одного или более выделенных ресурсов эфирной линии связи.
При условии, что новая точка сетевого присоединения использует частоту несущей, отличную от текущего сетевого присоединения, действие будет переходить с этапа 1652 на этап 1654, на котором WT переключает полосу частот своих приемника и передатчика на таковую у новой точки сетевого присоединения. Действие переходит с этапа 1654 на этап 1644. Если полоса частот новой точки сетевого присоединения была такой же, как у старой точки сетевого присоединения, никакого изменения в полосе частот WT не требуется, и этап 1654 пропускается с действием, переходящим с этапа 1652 на этап 1644.
Со временем, на основании принятых маяковых сигналов, выбор точки сетевого присоединения периодически переоценивается с переключением WT между точками сетевого присоединения и частотами несущих, в то время как меняются условия сигнала, например, вследствие WT, меняющего местоположения или вследствие других условий.
В некоторых, но необязательно всех, вариантах осуществления тоны маякового сигнала передаются с потоновой энергией сигнала, которая является взятой 10, 20, 30 или более раз средней потоновой энергией сигнала тонов сигнала, используемых для передачи пользовательских данных и/или немаяковых управляющих сигналов. В случае маякового сигнала с одним тоном частота маякового сигнала может быть быстро определена по частоте одиночного тона высокой мощности, который составляет маяковый сигнал.
Несмотря на то, что выбор между несущими был описан как являющийся основанным на сравнении детектированной энергии маяковых сигналов, принятых с двух разных передатчиков маяковых сигналов, может быть принято во внимание, что это сравнение может повлечь усреднение мощности маяковых сигналов, принятых с передатчика, по времени, чтобы создавать среднюю мощность принятого маякового сигнала соответствующей первому передатчику, а затем другую среднюю мощность принятого маякового сигнала соответствующей второму приемнику. Эти два средних значения затем могли бы сравниваться для определения, какой маяковый сигнал мощнее по среднему за период времени, а затем выбора несущей, ассоциативно связанной с маяковым сигналом, который был определен более мощным маяковым сигналом за несколько периодов времени. В качестве альтернативы, полная мощность маякового сигнала могла бы накапливаться со временем, а затем сравниваться касательно маяковых сигналов, принятых с разных передатчиков. В каждом из этих случаев выбор частоты несущей мог бы быть основан на сравнении энергии, принятой в одном или более маяковых сигналов с разных передатчиков.
Несмотря на то, что описаны преимущественно в контексте системы OFDM, способы и устройство по настоящему изобретению применимы к широкому диапазону систем связи, в том числе многим не OFDM и/или несотовым системам.
В различных вариантах осуществления узлы, описанные в материалах настоящей заявки, реализованы с использованием одного или более модулей для выполнения этапов, соответствующих одному или более способам по настоящему изобретению, например, выбора полосы несущей, цифровой сигнальной обработки, детектирования энергии/детектирования SNR, декодирования, временной синхронизации, детектирования качества сигнала и т.д. В некоторых вариантах осуществления различные признаки настоящего изобретения реализованы с использованием модулей. Такие модули могут быть реализованы с использованием программного обеспечения, аппаратных средств или сочетания программного обеспечения и аппаратных средств. Многие из вышеописанных способов или этапов способов могут быть реализованы с использованием машинно-исполняемых инструкций, таких как программное обеспечение, включенное в машиночитаемый носитель, такой как устройство памяти, например, ОЗУ (оперативное запоминающее устройство, RAM), гибкий диск и т. п., для управления машиной, например, компьютером общего применения, с или без дополнительного программного обеспечения, для реализации целых или частей вышеописанных способов, например, в одном или более узлах. Соответственно, среди прочего, настоящее изобретение направлено на машиночитаемый носитель, включающий в себя машинно-исполняемые инструкции для побуждения машины, например, процессора и ассоциативно связанных аппаратных средств, выполнять один или более этапов вышеописанного способа(ов).
Многочисленные дополнительные варианты по способам и устройству настоящего изобретения, описанного выше, будут очевидны специалистам в данной области техники ввиду вышеприведенного описания изобретения. Такие варианты должны считаться входящими в объем изобретения. Способы и устройство по настоящему изобретению могут быть и в различных вариантах осуществления являются используемыми с CDMA, мультиплексированием с ортогональным частотным разделением каналов (OFDM) и/или различными другими типами технологий связи, которые могут использоваться для предоставления линий беспроводной связи между узлами доступа и мобильными узлами. В некоторых вариантах осуществления узлы доступа реализованы в качестве базовых станций, которые устанавливают линии связи с мобильными узлами, используя OFDM и/или CDMA. В различных вариантах осуществления мобильные узлы реализованы в виде блокнотных компьютеров, персональных цифровых секретарей (PDA) или других портативных устройств, включающих в себя схемы приемника/передатчика и логику и/или подпрограммы для реализации способов по настоящему изобретению.
Изобретение относится к системам связи для определения эксплуатационной готовности несущих, выбора несущих и/или определения, когда инициировать эстафетную передачу обслуживания (ЭПО) с одной ассоциативно связанной точки сетевого присоединения, например, с одной несущей на другую точку с другой несущей. Технический результат заключается в повышении эффективности работы приемника (ПР). Описаны способы выбора частоты и инициирования ЭПО в системе беспроводной связи, применяющей многочисленные частоты несущих. Несмотря на то, что ПР настроен на единственную полосу, на основании относительной энергии (Э) одного или более компонентов маякового сигнала (МС), соответствующих используемой в текущий момент несущей, и одного или более компонентов МС, соответствующих альтернативной несущей, принимается решение выбора несущей и ЭПО. Мобильные узлы могут использовать одиночный РЧ-тракт с регулируемым РЧ-фильтром для приема и обработки сигнала в пределах первой выбранной полосы несущей, в том числе компонентов из разных передатчиков, например, первого компонента сигнала, идентифицированного первой выбранной в текущий момент полосой, и второго компонента сигнала, идентифицированного второй альтернативной полосой. Компоненты сигнала, например, компоненты МС с разных передатчиков, могут быть получены из сигнала, который соответствует многочисленным периодам времени передачи символа. Отдельные измерения Э сигналов выполняются над первым и вторым компонентами сигналов. Э компонентов сигнала сравнивается, и принимается решение в отношении того, должна ли быть инициирована ЭПО. 2 н. и 35 з.п. ф-лы, 16 ил.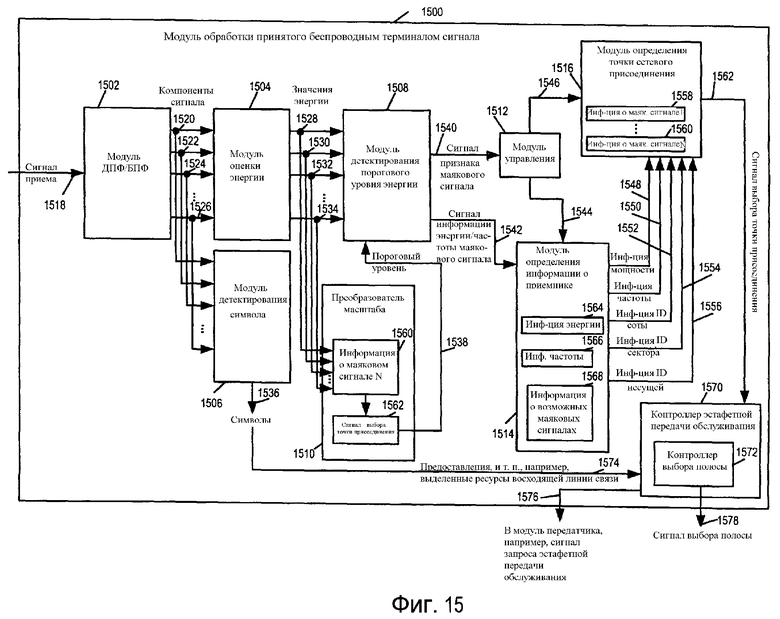
1. Способ связи для использования в беспроводном терминале в системе связи OFDM, способ включает в себя этапы, на которых: принимают первый сигнал в первой полосе частот, первый сигнал включает в себя множество тонов сигнала, каждый тон сигнала соответствует разной частоте; выполняют время-частотное преобразование над принятым сигналом, чтобы сформировать набор компонентов сигнала, соответствующих разным тонам сигнала в первой полосе частот; определяют энергию каждого из множества разных компонентов сигнала, которые соответствуют разным тонам сигнала в пределах первой полосы частот, чтобы сформировать набор значений посигнальной энергии тонов, каждое значение посигнальной энергии тона соответствует разной частоте; детектируют, по значению потоновой энергии компонентов сигнала, компонент сигнала, соответствующий маяковому сигналу; и определяют, на основании частоты компонента сигнала, детектированного соответствующим маяковому сигналу, частоту несущей, соответствующей маяковому сигналу.
2. Способ связи по п.1, в котором частота несущей, соответствующая маяковому сигналу, является отличной от текущей частоты несущей, используемой для связи с текущей сетевой точкой присоединения; и при этом частота несущей, соответствующая маяковому сигналу, расположена во второй полосе частот, которая используется для передачи пользовательских данных сетевой точкой присоединения, которая передавала детектированный компонент маякового сигнала, детектированный компонент маякового сигнала является расположенным вне второй полосы частот.
3. Способ по п.1, который включает в себя этап, на котором: принимают решение об эстафетной передаче обслуживания в качестве функции количества энергии, включенной в по меньшей мере один компонент маякового сигнала, принятый с текущей сетевой точки присоединения, и количества энергии, заключенной в детектированном компоненте маякового сигнала, детектированный компонент маякового сигнала передавался сетевой точкой присоединения, которая является отличной от текущей точки сетевого присоединения.
4. Способ по п.1, в котором детектирование, по значению потоновой энергии сигнала, компонентов сигнала, компонент сигнала соответствует маяковому сигналу, состоит в том, что: сравнивают определенную энергию каждого из упомянутого множества разных компонентов сигнала с пороговым уровнем энергии, который является большим, чем средняя потоновая энергия сигнала упомянутого принятого сигнала.
5. Способ по п.4, в котором пороговый уровень энергии является по меньшей мере взятой N раз средней потоновой энергией сигнала принятого первого сигнала в первой полосе частот, где N - положительное значение, большее, чем 5.
6. Способ по п.4, в котором пороговый уровень энергии является по меньшей мере взятой N раз средней потоновой энергией сигнала принятого первого сигнала в первой полосе частот, где N - положительное значение, большее, чем 20.
7. Способ по п.4, в котором пороговый уровень энергии является по меньшей мере взятой N раз средней потоновой энергией сигнала принятого первого сигнала в первой полосе частот, где N - положительное значение, большее, чем 99.
8. Способ по п.4, в котором пороговый уровень энергии является по меньшей мере взятой N раз средней потоновой энергией сигнала принятого первого сигнала в первой полосе частот, где N - положительное значение, большее, чем 150.
9. Способ по п.4, в котором, этап выполнения время-частотного преобразования выполняют с использованием одного из дискретного преобразования Фурье (ДПФ) и быстрого преобразования Фурье (БПФ).
10. Способ по п.6, также включающий в себя этап, на котором: в ответ на детектирование наличия компонента сигнала, соответствующего маяковому сигналу, определяют по меньшей мере один из ID сектора и ID соты на основании частоты компонента сигнала, превышающего пороговое значение.
11. Способ по п.10, в котором принятый символ принимают во время первого периода времени, который является периодом времени передачи символа.
12. Способ по п.11, также включающий в себя этап, на котором: детектируют символы OFDM, заключенные в первом принятом сигнале, по тонам, которые не обладают уровнями энергии, превышающими пороговое значение.
13. Способ по п.4, в котором пороговое значение является динамически формируемым пороговым значением, способ также включает в себя этап, на котором: формируют пороговое значение по меньшей мере по одному принятому сигналу.
14. Способ по п.13, в котором, по меньшей мере один принятый сигнал включает в себя множество тонов, этап формирования порогового значения состоит в том, что определяют потоновую энергию по меньшей мере одного принятого сигнала.
15. Способ по п.14, в котором потоновая энергия соответствует полной энергии по меньшей мере одного принятого сигнала, деленной на количество разных тонов, включенных в по меньшей мере один принятый сигнал, каждый тон соответствует разной частоте.
16. Способ по п.13, в котором по меньшей мере один принятый сигнал является сигналом, принятым в пределах времени передачи символа OFDM, превышающего первый период времени, в котором принимают первый сигнал.
17. Способ по п.13, в котором по меньшей мере один принятый сигнал является первым принятым сигналом.
18. Способ по п.4, также включающий в себя этап, на котором: сохраняют информацию об определенной энергии и частоте первого компонента сигнала в принятом сигнале, который был определен обладающим уровнем энергии компонента сигнала, превышающим пороговый уровень энергии.
19. Способ по п.18, в котором первый компонент сигнала принимают с передатчика сектора базовой станции, соответствующего сектору базовой станции, в котором расположен беспроводный терминал, выполняющий этап приема.
20. Способ по п.18, в котором первый сигнал принимают в первом периоде времени, способ также включает в себя этапы, на которых: принимают второй сигнал во втором периоде времени, второй сигнал включает в себя множество тонов сигнала, каждый тон сигнала во втором сигнале соответствует разной частоте; выполняют время-частотное преобразование над принятым вторым сигналом, чтобы сформировать набор компонентов сигнала, соответствующих разным тонам сигнала в первой полосе частот; определяют энергию каждого из множества разных компонентов сигнала во втором наборе компонентов сигнала, чтобы сформировать второй набор значений посигнальной энергии тонов, каждое значение посигнальной энергии тона во втором наборе значений посигнальной энергии тонов соответствует разной частоте; сравнивают определенную энергию каждого из множества разных компонентов сигнала с пороговым уровнем энергии; и формируют второй сигнал признака, указывающий наличие второго маякового сигнала, когда этап сравнения определяет, что превышен пороговый уровень энергии.
21. Способ по п.19, также включающий в себя этап, на котором: определяют, какой сектор базовой станции следует использовать в качестве сетевой точки присоединения, на основании сравнения определенной энергии первого компонента сигнала и определенной энергии компонента сигнала во втором сигнале, определенном обладающим уровнем энергии, превышающим пороговый уровень энергии.
22. Способ по п.1, в котором текущая точка сетевого присоединения является первым сектором соты, и при этом маяковый сигнал передается другим сектором упомянутой соты.
23. Способ по п.1, в котором текущая точка сетевого присоединения является первым сектором соты, и при этом детектированный маяковый сигнал передается другим сектором другой соты.
24. Способ по п.1, в котором текущая точка сетевого присоединения является первым модулем, соответствующим первой несущей, используемой в первом секторе соты, и при этом, детектированный маяковый сигнал передается вторым модулем, соответствующим второй несущей, используемой в упомянутом первом секторе соты, второй модуль служит в качестве второй точки сетевого присоединения в первом секторе соты.
25. Беспроводный терминал для использования в системе связи, беспроводный терминал содержит: средство для приема сигнала в первом периоде времени, сигнал включает в себя множество тонов сигнала, каждый тон сигнала соответствует разной частоте; средство для выполнения время-частотного преобразования над принятым сигналом, чтобы формировать набор компонентов сигнала, соответствующих разным тонам сигнала в первой полосе частот; средство для определения энергии каждого из множества разных компонентов сигнала, которые соответствуют разным частотам в пределах первой полосы частот, чтобы формировать набор значений посигнальной энергии тонов, каждое значение посигнальной энергии тона соответствует разной частоте; средство для сравнения определенной энергии каждого из множества разных компонентов сигнала с пороговым уровнем энергии, который является большим, чем средняя посигнальная энергия тона принятого сигнала, чтобы детектировать компонент сигнала, соответствующий маяковому сигналу; и средство для определения, должна ли быть инициирована эстафетная передача обслуживания на точку сетевого присоединения, которая передавала детектированный маяковый сигнал и которая использует частоту несущей для передачи пользовательских данных, которая является отличной от частоты несущей в употреблении беспроводным терминалом для связи с текущей точкой сетевого присоединения.
26. Беспроводный терминал по п.25, в котором пороговый уровень энергии является по меньшей мере взятой N раз средней посигнальной энергией тона принятого сигнала в первой полосе частот, где N - положительное значение, большее, чем 5.
27. Беспроводный терминал по п.25, в котором пороговый уровень энергии является по меньшей мере взятой N раз средней энергией сигнала принятого сигнала в первой полосе частот, где N - положительное значение, большее, чем 150.
28. Беспроводный терминал по п.25, в котором, средство для выполнения время-частотного преобразования выполнено использующим одно из дискретного преобразования Фурье (ДПФ) и быстрого преобразования Фурье (БПФ).
29. Беспроводный терминал по п.28, который также содержит средство для определения по меньшей мере одного из ID сектора и ID соты на основании частоты компонента сигнала, превышающего пороговое значение.
30. Беспроводный терминал по п.29, в котором первый период времени является периодом времени передачи символа OFDM.
31. Беспроводный терминал по п.30, который также содержит модуль детектирования символов, детектирующий символы, заключенные в принятом сигнале, по тонам, которые не обладают уровнями энергии, превышающими пороговое значение.
32. Беспроводный терминал по п.25, в котором пороговое значение является динамически формируемым пороговым значением, беспроводный терминал содержит: модуль формирования порогового значения, присоединенный к средству для выполнения время-частотного преобразования.
33. Беспроводный терминал по п.25, который также содержит средство для сохранения информации об определенных энергии и частоте первого компонента сигнала, принятого в течение первого периода времени, который был определен обладающим уровнем энергии компонента сигнала, превышающим пороговый уровень энергии.
34. Беспроводный терминал по п.33, в котором первый компонент сигнала принимается с передатчика сектора базовой станции, соответствующего сектору базовой станции, в котором расположен беспроводный терминал, выполняющий этап приема.
35. Беспроводный терминал по п.33, в котором большая часть энергии, заключенной в первом компоненте сигнала, принимается из сектора базовой станции, соответствующего сектору базовой станции, расположенному смежным сектору базовой станции, в котором расположен беспроводный терминал, принимающий первый компонент сигнала.
36. Беспроводный терминал по п.33, который также содержит: средство для приема второго сигнала во втором периоде времени, упомянутый второй сигнал включает в себя множество тонов сигнала, каждый тон сигнала во втором сигнале соответствует разной частоте; средство для выполнения время-частотного преобразования над принятым вторым сигналом, чтобы формировать набор компонентов сигнала, соответствующих разным тонам сигнала в первой полосе частот; средство для определения энергии каждого из множества разных компонентов сигнала во втором наборе компонентов сигнала, чтобы формировать второй набор значений посигнальной энергии тонов, каждое значение посигнальной энергии тона во втором наборе значений посигнальной энергии тонов соответствует разной частоте; средство для сравнения определенной энергии каждого из множества разных компонентов сигнала с пороговым уровнем энергии; и средство для определения, должна ли быть инициирована эстафетная передача обслуживания.
37. Беспроводный терминал по п.34, который также содержит средство для определения, какой сектор базовой станции следует использовать в качестве сетевой точки присоединения, на основании сравнения определенной энергии первого компонента сигнала и определенной энергии компонента сигнала во втором сигнале, определенном обладающим уровнем энергии, превышающим пороговый уровень энергии.
| US 6292508 B1, 18.09.2001 | |||
| RU 2002129901 A, 10.03.2004 | |||
| СПОСОБ И УСТРОЙСТВО ПОИСКА ПИЛОТ-СИГНАЛА В СОТОВОЙ СИСТЕМЕ СВЯЗИ | 1995 |
|
RU2150176C1 |
| US 6717926 B1, 06.04.2004. | |||

