По настоящей заявке на патент испрашивается приоритет по дате подачи предварительной заявки США, серийный №61/025666, озаглавленной «METHOD AND APPARATUS FOR CODING CONTROL INFORMATION IN WIRELESS COMMUNICATIONS», поданной 1 февраля 2008 года. Данная заявка также относится к одновременно рассматриваемой заявке на патент в США, серийный №12/163812 (№дела 080266), упомянутой «BEACON-BASED CONTROL CHANNELS», поданной 27 июня 2008 года. Вышеупомянутые заявки полностью включены в этот документ по ссылке.
I. Область техники, к которой относится изобретение
Следующее описание в целом относится к беспроводной связи, а более конкретно к способам и устройствам для кодирования управляющей информации.
II. Уровень техники
Для обеспечения различных типов связи широко применяются системы беспроводной связи, например посредством таких систем беспроводной связи могут обеспечиваться речь и/или данные. Типичная система беспроводной связи, или сеть, может обеспечивать доступ множества пользователей к одному или нескольким общим ресурсам (например, полоса пропускания, мощность передатчика и т.д.). Например, система может использовать множество способов множественного доступа, например мультиплексирование с частотным разделением (FDM), мультиплексирование с разделением времени (TDM), мультиплексирование с кодовым разделением (CDM), мультиплексирование с ортогональным частотным разделением (OFDM), высокоскоростная пакетная передача данных (HSPA, HSPA+) и другие. Кроме того, системы беспроводной связи могут проектироваться для реализации одного или нескольких стандартов, например IS-95, CDMA2000, IS-856, W-CDMA, TD-SCDMA и т.п.
При проектировании надежной системы беспроводной связи должно уделяться специальное внимание конкретным параметрам передачи данных. Например, в сети с плотным размещением узлов, в которой спектр повторно используется разными секторами, и зоны обслуживания этих секторов перекрываются, сигналы могут часто сталкиваться из-за того, что разные передатчики одновременно получают доступ к идентичному спектру, что вызывает значительные взаимные помехи. Например, рассмотрим беспроводную систему с передатчиком TX_A и приемником RX_A. Передатчик TX_A может быть сектором или базовой станцией. Приемник RX_A может быть мобильной станцией или ретрансляционной станцией (и наоборот, передатчик TX_A может быть мобильной станцией, а приемник RX_A может быть базовой станцией). Передатчик TX_A обычно передает комбинацию каналов передачи данных и каналов управления в RX_A и другие приемники. Каналы управления могут включать в себя, не ограничиваясь этим, например, каналы передачи подтверждения, каналы управления мощностью, каналы назначения ресурсов и т.д.
В некоторых случаях взаимные помехи, вызванные TX_B, могут быть очень высокими, соответственно, ухудшать отношение сигнал/шум в RX_A до такой степени, что он не сможет принимать свои каналы управления из TX_A. Такие высокие уровни взаимных помех распространены в беспроводных технологиях, в которых развертывания не планируются. Примеры могут включать в себя развертывания фемтосоты, развертывания WiFi и т.д. Эта проблема является особенно острой в системах с «ограниченной связью», в которых приемнику не обеспечивают возможность соединения с радиолинией с самым сильным уровнем сигнала. Например, пользователь WiFi не может соединиться с Точкой доступа WiFi своего соседа, даже если уровень сигнала из точки доступа этого соседа значительно выше, чем уровень сигнала из его собственной точки доступа.
Простым принципом, чтобы справиться с такими высокими уровнями взаимных помех, является предотвращение взаимных помех. В этом случае TX_A и TX_B может выдаваться команда для передачи в разное время или частотные интервалы, чтобы TX_B и TX_A больше не создавали взаимных помех. Однако, если или TX_A, или TX_B находится в такой зоне, что отношение сигнал/шум является низким, то прием управляющих данных, которые включают в себя такую информацию для предотвращения взаимных помех, сам может быть трудным. Соответственно, требуются способ и устройство для устойчивого к ошибкам кодирования/декодирования управляющих данных, передаваемых в беспроводной среде с помехами.
Вышеописанные недостатки современных систем беспроводной связи приведены только для того, чтобы дать общий обзор некоторых проблем обычных систем, и не являются исчерпывающими. Другие проблемы, связанные с обычными системами, и соответствующие преимущества различных иллюстративных вариантов осуществления, описанных в этом документе, могут также стать очевидными после просмотра следующего описания.
Сущность изобретения
Далее представлено упрощенное краткое изложение одного или нескольких вариантов осуществления для обеспечения понимания по существу таких вариантов осуществления. Это краткое изложение не является исчерпывающим кратким обзором всех предполагаемых вариантов осуществления и не предназначено ни для идентификации ключевых или критических элементов всех вариантов осуществления, ни для установления границ объема любого или всех вариантов осуществления. Его единственной целью является представление некоторых понятий одного или нескольких вариантов осуществления в упрощенной форме как вступления к более подробному описанию, которое представлено далее.
Согласно одному или нескольким вариантам осуществления и соответствующему раскрытию их предмета изобретения описаны различные аспекты в связи с обеспечением каскадных кодов для каналов радиомаяка. В одном аспекте основанная на радиомаяке сигнализация раскрыта как имеющая, в частности, требуемые характеристики для передачи данных в беспроводной среде с помехами, причем каскадирование помехоустойчивых кодов обеспечивает передачу таких основанных на радиомаяке сигналов более точно и эффективно.
В одном аспекте раскрыты способ, устройство и компьютерный программный продукт для кодирования управляющего радиосигнала. В таком варианте осуществления набор информационных битов принимается и кодируется посредством первого помехоустойчивого кода для создания первого набора закодированных битов. Первый набор закодированных битов после этого кодируется посредством второго помехоустойчивого кода для создания второго набора закодированных битов. Второй набор закодированных битов после этого модулируется в форме тонов радиомаяка и далее передается в приемный блок.
В другом аспекте раскрыты способ, устройство и компьютерный программный продукт для декодирования управляющего радиосигнала. В таком варианте осуществления тоны радиомаяка, соответствующие набору управляющих битов, принимаются и далее демодулируются для установления набора демодулированных битов. Демодулированные биты после этого декодируются посредством первого помехоустойчивого декодера для установления первого набора декодированных битов. Первый набор декодированных битов после этого декодируется посредством второго помехоустойчивого декодера для установления второго набора декодированных битов, который включает в себя набор управляющих битов.
Для выполнения вышеупомянутых и связанных частей один или несколько вариантов осуществления содержат признаки, полностью описанные далее в этом документе и конкретно указанные в формуле изобретения. В последующем описании и прилагаемых чертежах подробно изложены определенные иллюстративные аспекты одного или нескольких вариантов осуществления. Однако эти аспекты указывают только на некоторые различные пути возможного применения принципов различных вариантов осуществления, и подразумевается, что описанные варианты осуществления содержат все такие аспекты и их эквиваленты.
Краткое описание чертежей
Фиг.1 - пример системы беспроводной связи согласно различным аспектам, изложенным в этом документе.
Фиг.2 - пример иллюстративной среды беспроводной связи, которую можно применять вместе с различными системами и способами, описанными в этом документе.
На фиг.3 изображен сигнал радиомаяка согласно некоторым аспектам.
На фиг.4 изображен другой сигнал радиомаяка, который может быть использован с одним или несколькими раскрытыми примерами.
На фиг.5 изображен еще один сигнал радиомаяка, который может быть использован с одним или несколькими раскрытыми примерами.
Фиг.6 - блок-схема последовательности операций, на которой изображен иллюстративный способ кодирования и декодирования основанных на радиомаяке управляющих сигналов согласно одному аспекту описания предмета изобретения.
На фиг.7 изображена блок-схема иллюстративной системы, которая обеспечивает кодирование и декодирование основанных на радиомаяке управляющих сигналов согласно одному аспекту описания предмета изобретения.
Фиг.8 - блок-схема последовательности операций, иллюстрирующая показательный способ кодирования управляющих сигналов в форме радиомаяков посредством каскадных кодов для обеспечения меньшей вероятности ложного сигнала.
Фиг.9 - блок-схема последовательности операций, иллюстрирующая показательный способ декодирования основанных на радиомаяке управляющих сигналов с каскадными кодами для обеспечения меньшей вероятности ложного сигнала.
На фиг.10 изображен иллюстративный процесс кодирования и декодирования для обеспечения меньшей вероятности ложного сигнала при обработке двух наборов сэмплов (дискретных значений сигнала) управляющих битов согласно одному аспекту описания предмета изобретения.
Фиг.11 - блок-схема последовательности операций, иллюстрирующая показательный способ кодирования управляющих сигналов в форме радиомаяков посредством каскадных кодов для обеспечения увеличения количества управляющих битов для каждого кодового слова.
Фиг.12 - блок-схема последовательности операций, иллюстрирующая показательный способ декодирования основанных на радиомаяке управляющих сигналов посредством каскадных кодов для обеспечения увеличения количества управляющих битов для каждого кодового слова.
На фиг.13 изображен иллюстративный процесс кодирования и декодирования, который использует один кодер/декодер для обработки большого управляющего кодового слова.
На фиг.14 изображен иллюстративный процесс кодирования и декодирования, который использует каскадные коды для обработки большого управляющего кодового слова согласно одному аспекту описания предмета изобретения.
Фиг.15 - пример иллюстративной системы связи, реализованной согласно различным аспектам, включающей в себя множество сот.
Фиг.16 - пример иллюстративной базовой станции согласно различным аспектам, описанным в этом документе.
Фиг.17 - пример иллюстративного беспроводного терминала согласно различным аспектам, описанным в этом документе.
Фиг.18 - пример иллюстративной связи электрических компонентов, которые выполняют кодирование управляющего сигнала в форме радиомаяка в среде беспроводной связи с использованием каскадных кодов.
Фиг.19 - пример иллюстративной связи электрических компонентов, которые выполняют декодирование основанного на радиомаяке управляющего сигнала в системе беспроводной связи.
Подробное описание
Далее описываются различные варианты осуществления согласно чертежам, в которых используется сквозная нумерация. В последующем описании в целях пояснения изложены многочисленные конкретные детали для обеспечения полного понимания одного или нескольких вариантов осуществления. Однако может быть очевидно, что такой(ие) вариант(ы) осуществления можно применять без этих конкретных деталей. В других случаях общеизвестные структуры и устройства представлены в виде блок-схемы для обеспечения описания одного или нескольких вариантов осуществления.
Способы, описанные в этом документе, могут использоваться для различных систем беспроводной связи, например для множественного доступа с кодовым разделением (CDMA), множественного доступа с временным разделением (TDMA), множественного доступа с частотным разделением (FDMA), множественного доступа с ортогональным частотным разделением (OFDMA), множественного доступа с частотным разделением и передачей на одной несущей (SC-FDMA), высокоскоростной пакетной передачи данных и других систем. Термины «система» и «сеть» часто используют как синонимы. В системе CDMA может быть реализована такая радиотехнология, как универсальный наземный радиодоступ (UTRA), CDMA2000 и т.д. UTRA включает в себя широкополосный CDMA (W-CDMA) и другие разновидности CDMA. CDMA2000 охватывает стандарты IS-2000, IS-95 и IS-856. В системе TDMA может быть реализована такая радиотехнология, как глобальная система мобильной связи (GSM). В системе OFDMA может быть реализована такая радиотехнология, как усовершенствованный UTRA (Evolved UTRA, E-UTRA), ультрамобильная широкополосная связь (Ultra Mobile Broadband, UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM и т.д. UTRA и E-UTRA являются частью универсальной мобильной телекоммуникационной системы (UMTS). Проект долгосрочного развития (LTE) 3GPP является планируемым выпуском UMTS, который использует E-UTRA, который применяет OFDMA на нисходящей линии связи и SC-FDMA на восходящей линии связи.
Множественный доступ с частотным разделением и передачей на одной несущей (SC-FDMA) использует модуляцию одной несущей и компенсацию в частотной области. SC-FDMA имеет аналогичные характеристики и, по существу, его общая сложность идентична общей сложности системы OFDMA. Сигнал SC-FDMA имеет более низкий уровень отношения пиковой и средней мощностей (PAPR) вследствие присущей ему структуры с одной несущей. SC-FDMA может использоваться, например, в передаче информации по восходящей линии связи, где низкий PAPR очень полезен для терминалов доступа с точки зрения эффективности мощности передатчика. Соответственно, SC-FDMA может быть реализован в качестве схемы множественного доступа на восходящей линии связи в проекте долгосрочного развития (LTE) 3GPP (3GPP long term evolution) или в усовершенствованном UTRA (Evolved UTRA).
Высокоскоростная пакетная передача данных (HSPA) может включать в себя технологию высокоскоростной пакетной передачи данных по нисходящей линии связи (HSDPA) и технологию высокоскоростной пакетной передачи данных по восходящей линии связи (HSUPA) или усовершенствованной восходящей линии связи (EUL) и может также включать в себя технологию HSPA+. HSDPA, HSUPA и HSPA+ являются частью спецификаций Проекта партнерства третьего поколения (3GPP), Выпуск 5, Выпуск 6 и Выпуск 7 соответственно.
Высокоскоростная пакетная передача данных по нисходящей линии связи (HSDPA) оптимизирует передачу данных из сети в абонентское оборудование (UE). Как используется в этом описании, передача из сети в абонентское оборудование UE может называться «нисходящая линия связи» (DL). Способы передачи могут допускать скорости передачи данных несколько Мбит/с. Высокоскоростная пакетная передача данных по нисходящей линии связи (HSDPA) может увеличить пропускную способность мобильных радиосетей. Высокоскоростная пакетная передача данных по восходящей линии связи (HSUPA) может оптимизировать передачу данных из терминала в сеть. Как используется в этом описании, передача из терминала в сеть может называться «восходящая линия связи» (UL). Способы передачи по восходящей линии связи могут допускать скорости передачи данных несколько Мбит/с. HSPA+ обеспечивает дополнительные усовершенствования как на восходящей линии связи, так и на нисходящей линии связи, как задано в Выпуске 7 спецификации 3GPP. Способы высокоскоростной пакетной передачи данных (HSPA) обычно допускают более быстрые взаимодействия между нисходящей линией связи и восходящей линией связи в службах данных, передающих большие объемы данных, например в приложениях мобильный офис, видеоконференцсвязь и передача голоса по IP-сетям (VoIP).
Быстрые протоколы передачи данных, например гибридный автоматический запрос на повторную передачу (HARQ), может использоваться на восходящей линии связи и нисходящей линии связи. Такие протоколы, например гибридный автоматический запрос на повторную передачу (HARQ), обеспечивают возможность получателю автоматически запрашивать повторную передачу пакета, который мог быть принят с ошибкой.
В этом документе описаны различные варианты осуществления применительно к терминалу доступа. Терминал доступа также может называться системой, абонентским блоком, терминалом абонента, мобильной станцией, мобильным телефоном, удаленной станцией, удаленным терминалом, мобильным устройством, терминалом пользователя, терминалом, устройством радиосвязи, агентом пользователя, устройством пользователя или абонентским оборудованием (UE). Терминал доступа может быть сотовым телефоном, радиотелефоном, телефоном с протоколом инициации сеансов (SIP), станцией беспроводного локального шлейфа (WLL), персональным цифровым секретарем (PDA), малогабаритным устройством, имеющим средство беспроводного соединения, вычислительным устройством или другим устройством обработки, соединенным с беспроводным модемом. Кроме того, в этом документе описаны различные варианты осуществления, связанные с базовой станцией. Базовая станция может использоваться для обмена информацией с терминалом(ами) доступа и может также называться точкой доступа, узлом B, усовершенствованным узлом B (eNodeB) или некоторым другим термином.
Согласно фиг.1 изображена система 100 беспроводной связи согласно различным вариантам осуществления, представленным в этом описании. Система 100 содержит базовую станцию 102, которая может включать в себя множество групп антенн. Например, одна группа антенн может включать в себя антенны 104 и 106, другая группа может содержать антенны 108 и 110, и дополнительная группа может включать в себя антенны 112 и 114. Для каждой группы антенн изображены две антенны, однако для каждой группы может быть использовано большее или меньшее количество антенн. Базовая станция 102 может дополнительно содержать канал передатчика и канал приемника, каждый из которых может в свою очередь содержать множество компонентов, связанных с приемом и передачей сигнала (например, процессоры, модуляторы, мультиплексоры, демодуляторы, демультиплексоры, антенны и т.д.), как будет понятно специалисту в данной области техники.
Базовая станция 102 может обмениваться информацией с одним или несколькими терминалами доступа, например терминалом 116 доступа и терминалом 122 доступа, однако должно быть понятно, что базовая станция 102 может обмениваться информацией по существу с любым количеством терминалов доступа, аналогичных терминалам 116 и 122 доступа. Терминалы 116 и 122 доступа могут быть, например, сотовыми телефонами, смартфонами, портативными компьютерами, карманными устройствами связи, карманными вычислительными устройствами, спутниковыми радио, глобальными системами определения местоположения, устройствами PDA и/или любым другим соответствующим устройством для обмена информацией через систему 100 беспроводной связи. Как изображено, терминал 116 доступа связан с антеннами 112 и 114, где антенны 112 и 114 передают информацию в терминал 116 доступа по прямой линии связи 118 и принимают информацию из терминала 116 доступа по обратной линии связи 120. Кроме того, терминал 122 доступа связан с антеннами 104 и 106, где антенны 104 и 106 передают информацию в терминал 122 доступа по прямой линии связи 124 и принимают информацию из терминала 122 доступа по обратной линии связи 126. В системе с дуплексной связью с частотным разделением (FDD) прямая линия связи 118 может использовать отличную полосу частот от той, которую использует обратная линия связи 120, и прямая линия связи 124 может использовать отличную полосу частот от той, которую использует обратная линия связи 126, например. Кроме того, в системе с дуплексной связью с временным разделением (TDD) прямая линия связи 118 и обратная линия связи 120 могут использовать общую полосу частот, и прямая линия связи 124 и обратная линия связи 126 могут использовать общую полосу частот.
Каждая группа антенн и/или зона, для связи в которой они предназначены, может называться сектором базовой станции 102. Например, группы антенн могут быть предназначены для обмена информацией с терминалами доступа в секторе зон, охваченных базовой станцией 102. При связи по прямым линиям связи 118 и 124 передающие антенны базовой станции 102 могут использовать формирование главного лепестка диаграммы направленности антенны для улучшения отношения сигнал/шум прямых линий связи 118 и 124 для терминалов 116 и 122 доступа. Кроме того, несмотря на то что базовая станция 102 использует формирование главного лепестка диаграммы направленности антенны для передачи в терминалы 116 и 122 доступа, разбросанные случайным образом по всей относящейся к ней зоне охвата, терминалы доступа в соседних сотах могут подвергаться меньшему влиянию помех по сравнению с базовой станцией, передающей через одну антенну во все свои терминалы доступа.
На фиг.2 изображена иллюстративная система 200 радиосвязи. Для краткости в системе 200 беспроводной связи изображены одна базовая станция 210 и один терминал 250 доступа. Однако следует понимать, что система 200 может содержать несколько базовых станций и/или несколько терминалов доступа, причем дополнительные базовые станции и/или терминалы доступа могут быть по существу подобными иллюстративной базовой станции 210 и терминалу 250 доступа, описанным ниже, или отличными от них. Кроме того, следует понимать, что базовая станция 210 и/или терминал 250 доступа могут использовать системы и/или способы, описанные в этом документе, для обеспечения беспроводной связи между ними.
В базовой станции 210 данные трафика для нескольких потоков данных обеспечивают из источника 212 данных в процессор 214 данных передатчика (TX). Согласно одному примеру каждый поток данных может передаваться через соответствующую антенну. Процессор 214 данных TX форматирует, кодирует и осуществляет перемежение потока данных трафика на основе конкретной схемы кодирования, выбранной для этого потока данных, для обеспечения закодированных данных.
С использованием способов мультиплексирования с ортогональным частотным разделением (OFDM) закодированные данные для каждого потока данных могут быть мультиплексированы с данными пилот-сигнала. Дополнительно или в качестве альтернативы, символы пилот-сигнала могут быть мультиплексированы с частотным разделением (FDM), мультиплексированы с временным разделением (TDM) или мультиплексированы с кодовым разделением (CDM). Данные пилот-сигнала, как правило, являются известной комбинацией данных, которая обрабатывается известным способом и может использоваться в терминале 250 доступа для оценки характеристики канала. Мультиплексированные пилот-сигналы и закодированные данные для каждого потока данных могут модулироваться (например, отображаться в символы) на основе конкретной схемы модуляции (например, двухпозиционной фазовой манипуляции (BPSK), квадратурной фазовой манипуляции (QSPK), многоуровневой фазовой манипуляции (М-PSK) или многоуровневой квадратурной амплитудной модуляции (M-QAM) и т.д.), выбранной для этого потока данных для обеспечения символов модуляции. Скорость передачи данных, кодирование и модуляция для каждого потока данных могут определяться командами, исполняемыми или обеспечиваемыми процессором 230.
Символы модуляции для потоков данных могут обеспечиваться в процессор 220 MIMO TX, который также может обрабатывать символы модуляции (например, для OFDM). Процессор 220 MIMO TX далее обеспечивает NT потоков символов модуляции в NT передатчиков (TMTR) с 222a по 222t. В различных вариантах осуществления процессор 220 MIMO TX применяет веса формирования главного лепестка диаграммы направленности антенны к символам потоков данных и к антенне, из которой передается символ.
Каждый передатчик 222 принимает и обрабатывает соответствующий поток символов для обеспечения одного или нескольких аналоговых сигналов и далее преобразует (например, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы для обеспечения модулированного сигнала, подходящего для передачи по каналу MIMO. Кроме того, NT модулированных сигналов из передатчиков с 222a по 222t передаются из NT антенн с 224a по 224t соответственно.
В терминале 250 доступа переданные модулированные сигналы принимаются NR антеннами с 252a по 252r, и принятый сигнал из каждой антенны 252 обеспечивается в соответствующий приемник (RCVR) с 254a по 254r. Каждый приемник 254 преобразует (например, фильтрует, усиливает и преобразует с понижением частоты) соответствующий сигнал, оцифровывает преобразованный сигнал для обеспечения сэмплов и далее обрабатывает сэмплы для обеспечения соответствующего «принятого» потока символов.
Процессор 260 данных RX может принимать и обрабатывать NR принятых потоков символов из NR приемников 254 на основе конкретного способа обработки приемника для обеспечения NT «детектированных» потоков символов. Процессор 260 данных RX может демодулировать, устранять перемежение и декодировать каждый детектированный поток символов для восстановления данных трафика для потока данных. Обработка процессором 260 данных RX является дополняющей к той, которая выполняется процессором 220 MIMO TX и процессором 214 данных TX в базовой станции 210.
Процессор 270 может периодически определять, какую доступную технологию использовать, как обсуждалось выше. Кроме того, процессор 270 может формулировать сообщение обратной линии связи, содержащее часть с индексами матрицы и часть со значением ранга.
Сообщение обратной линии связи может содержать различные типы информации относительно линии связи и/или потока принимаемых данных. Сообщение обратной линии связи может обрабатываться процессором 238 данных TX, который также принимает данные трафика для нескольких потоков данных из источника 236 данных, модулироваться модулятором 280, преобразовываться передатчиками с 254a по 254r и передаваться обратно в базовую станцию 210.
В базовой станции 210 модулированные сигналы из терминала 250 доступа принимаются антеннами 224, преобразуются приемниками 222, демодулируются демодулятором 240 и обрабатываются процессором 242 данных RX для извлечения сообщения обратной линии связи, переданного терминалом 250 доступа. Кроме того, процессор 230 может обрабатывать извлеченное сообщение для определения того, какую матрицу предварительного кодирования использовать для определения весов формирования главного лепестка диаграммы направленности антенны.
Процессоры 230 и 270 могут управлять (например, контролировать, координировать, организовывать и т.д.) функционированием в базовой станции 210 и терминале 250 доступа соответственно. Соответствующие процессоры 230 и 270 могут быть связаны с памятью 232 и 272, в которой хранятся коды программ и данные. Процессоры 230 и 270 также могут выполнять вычисления для получения оценок частотных и импульсных характеристик для восходящей линии связи и нисходящей линии связи соответственно.
В некоторых аспектах настоящего раскрытия предмета изобретения используются радиомаяки для передачи каналов управления (в том числе, например, сообщений для предотвращения взаимных помех). В обычной системе OFDMA символ OFDM радиомаяка (или просто радиомаяк) может быть символом OFDM, в котором большая доля (возможно, вся) мощность передается на одной поднесущей, называемой поднесущей радиомаяка. Так как большое количество мощности передается на этой поднесущей, то его легко детектировать даже при низких отношениях сигнал/шум (SNR). Следовательно, радиомаяки обеспечивают очень полезный механизм сигнализации небольшого количества битов в приемники при очень низких SNR. Например, последовательность радиомаяков может использоваться для сигнализации SectorID (идентификатора сектора) данного сектора. Поднесущие, модулируемые в вышеупомянутой последовательности, могут меняться от одного символа радиомаяка к следующему.
Одним результатом использования радиомаяков в сценариях с доминирующими источниками помех является то, что уровень сигнала доминирующего источника помех больше не имеет значения, поскольку радиомаяки доминирующего источника помех с высокой вероятностью занимают другую поднесущую. Следовательно, радиомаяки являются требуемым способом передачи каналов управления, в том числе сообщений для предотвращения взаимных помех.
В одном аспекте настоящего раскрытия предмета изобретения не вся мощность в символе OFDM должна быть израсходована. Например, для передачи радиомаяка может быть распределен сегмент радиомаяка, который является подмножеством всех доступных поднесущих. В этом подсегменте приемник RX_A может передавать последовательность радиомаяка с запросом для разрешения этой помехи. После декодирования последовательности радиомаяка соседние передатчики могут принимать решение о том, осуществлять или не осуществлять передачу в течение периода времени, для уменьшения помех для RX_A. Сегмент радиомаяка может быть общим для всех секторов в развертывании.
В некоторых аспектах сегмент радиомаяка может сосуществовать с существующей передачей данных определенных передатчиков или может быть на свободном сегменте, выделенном для сигнализации радиомаяка. В одном примере сегмент радиомаяка может использоваться макросотами для передачи данных, в то время как фемтосоты используют его для передачи сообщения для предотвращения взаимных помех. Размер сегмента может изменяться по всем разным классам сектора.
Присутствие радиомаяка внутри сегмента радиомаяка идентифицируется на основе их более высокого уровня сигнала относительно другой поднесущей. Закодированная информация может переноситься в позиции радиомаяков. Может выполняться оценка взаимных помех для оценки уровня фоновых помех, чтобы можно было установить порог для идентификации присутствия символа радиомаяка. Например, если мощность на поднесущей равна P, и оцененный уровень помех равен I, то считается, что поднесущая содержит радиомаяк, если P/I>=T, а иначе не содержит радиомаяк, где T - пороговое значение.
На фиг.3 изображен сигнал 300 радиомаяка в иллюстративной системе мультиплексирования с ортогональным частотным разделением (OFDM) сигналов согласно различным аспектам, описанным в этом документе. Первое и второе (или большее количество) подмножества широковещательной информации могут передаваться с использованием специального сигнала или схемы сигнализации, называемых сигналом радиомаяка.
Горизонтальная ось 302 представляет время, и вертикальная ось 304 представляет частоту. Вертикальный столбец представляет символ OFDM (или сегмент поднесущих внутри символа OFDM), причем каждый символ OFDM содержит множество тонов, разделенных по частоте. Каждый маленький блок, например блок 308, представляет символ-тон, который является степенью свободы в символе OFDM.
Сигнал 300 радиомаяка включает в себя последовательность информационных пакетов радиомаяка, которые передаются последовательно во времени. Информационный пакет радиомаяка включает в себя один или несколько (например, небольшое количество) символов радиомаяка. Каждый символ радиомаяка может быть сигналом, передаваемым в одной степени свободы с намного более высокой мощностью передачи, чем средняя мощность передачи для каждой степени свободы за относительно большой интервал времени.
Изображены четыре маленьких черных блока 310, каждый из которых представляет символ сигнала радиомаяка. Мощность передачи каждого символа сигнала радиомаяка намного выше (например, по меньшей мере, приблизительно на 10 или 15 дБ выше), чем средняя мощность передачи символа для каждого тона за интервал 312 времени. Каждый символ 314, 316, 318, 320 OFDM включает в себя информационный пакет радиомаяка. В этом примере каждый информационный пакет радиомаяка включает в себя один символ 310 радиомаяка за один период 306 передачи символа, причем интервал 312 времени включает в себя четыре периода 306 символа передачи.
На фиг.4 изображен другой сигнал 400 радиомаяка, который может быть использован с одним или несколькими раскрытыми примерами. Сигнал 400 радиомаяка является аналогичным сигналу 300 радиомаяка по вышеуказанному чертежу. Различие между этими двумя сигналами 300, 400 радиомаяка заключается в том, что сигнал 400 радиомаяка включает в себя два символа радиомаяка идентичного одного тона за два последовательных символа OFDM. В частности, информационный пакет радиомаяка включает в себя два последовательных символа 412, 414, 416, 418 OFDM. В общем, в асинхронной сети прием последовательностей радиомаяка может быть улучшен с повтором каждого символа OFDM некоторое количество раз в передатчике.
На фиг.5 изображен еще один сигнал 500 радиомаяка, который может быть использован с одним или несколькими раскрытыми примерами. Этот сигнал 500 радиомаяка является аналогичным вышеупомянутым сигналам 300, 400 радиомаяков. Различие состоит в том, что в этот сигнал 500 радиомаяка включается множество символов радиомаяка за один символ OFDM. В частности, для этого примера, пары символов 510 радиомаяка включаются за каждый из символов 514, 516, 518 и 520 OFDM.
Для преодоления влияния ошибочно идентифицированных радиомаяков может использоваться помехоустойчивое кодирование для защиты радиомаяков так, что информационные биты, переносимые радиомаяками, могут быть декодированы при наличии взаимных помех и шума. Одним способом кодирования последовательностей радиомаяка является использование кодов Рида-Соломона. В одном аспекте коды Рида-Соломона преобразуют исходную последовательность радиомаяка длины K, которая переносит определенное количество битов управляющей информации, в новую последовательность длины N (N>K). В таком варианте осуществления введенная избыточность может служить, по меньшей мере, двум целям. Во-первых, она способствует защите от шума и взаимных помех, так что даже когда некоторые из радиомаяков приняты с ошибкой, может быть восстановлена правильная информация. И, во-вторых, она способствует разделению множества последовательностей радиомаяка, передаваемых одновременно (операция, называемая «устранение неоднозначности»), где избыточность способствует определению декодером того, какие комбинации принятых радиомаяков формируют действительные кодовые слова (и, следовательно, переносят закодированную информацию).
В некоторых аспектах настоящего раскрытия предмета изобретения идентичный код Рида-Соломона может использоваться всеми секторами (или мобильными телефонами). В таком случае в закодированное сообщение может быть включен SectorID или изменяющийся во времени хэш (hash) SectorID для содействия тому, чтобы мобильные телефоны распознавали разные сектора. С другой стороны, разные сектора могут использовать разные коды. Одной возможностью является использование скремблированного кода RS, где данное кодовое слово Рида-Соломона умножается на относящуюся к сектору последовательность по алфавиту, представляющему интерес. Скремблированное кодовое слово после этого используется для выбора местоположений радиомаяков в сегменте радиомаяка. Здесь несмотря на то, что это описание относится к прямой линии связи, должно быть понято, что аналогичные коды также могут быть применены к обратной линии связи.
Для улучшения характеристик декодирования и устранения неоднозначности последовательностей радиомаяка может быть использована случайная информация детектированных радиомаяков. Она включает в себя значения мощности и фазы тонов радиомаяка, а также оценку уровня сигнала всех поднесущих.
Для конкретных приложений, однако, может потребоваться более сложная схема кодирования. Например, в некоторых приложениях может потребоваться увеличение количества управляющих битов, которое кодовое слово радиомаяка может переносить. В целом, размер алфавита (Q) и количество информационных символов (K) определяют количество управляющих битов, которое переносит каждое кодовое слово радиомаяка. Однако слишком большое увеличение значений Q и K может потребовать чрезмерно сложной схемы декодирования, что в свою очередь означает, что количество управляющих битов, которое каждое кодовое слово радиомаяка может перенести, является ограниченным.
Для других приложений более сложная схема кодирования может также потребоваться для уменьшения вероятности ложного сигнала. Кроме того, несмотря на то что алгоритм декодирования радиомаяка может быть спроектирован с целью достижения определенной вероятности ложного сигнала, может оказаться, что для некоторых последовательностей радиомаяка требуется значительно меньшая вероятность ложного сигнала, чем для других. Например, может быть необходима передача управляющего сообщения, которое «требует особого внимания», причем это сообщение пытается очистить чередования или бланкировать сегмент управления на относительно длительный период времени. Так как ложный сигнал такого сообщения может дорого обходиться, то может потребоваться кодировать особенно чувствительные сообщения для получения более низкой вероятности ложного сигнала по сравнению с другими менее чувствительными управляющими сообщениями.
В одном аспекте обеспечены должным образом спроектированные каскадные коды для значительного увеличения количества управляющих битов и уменьшения вероятности ложного сигнала для сообщений-радиомаяков. Кроме того, вместо одного уровня кодирования (например, коды Рида-Соломона) в проекте каскадного кода до модуляции закодированных символов в форме радиомаяков управляющие биты кодируются посредством внешнего кода, за которым следует внутренний код. Внутренний код и внешний код могут быть разными кодами или идентичным кодом, выбранными из набора доступных помехоустойчивых кодов. Одной из возможностей является оставить внутренний код идентичным вышеупомянутому одноуровневому проекту (например, использование кода Рида-Соломона) и сосредоточить внимание на проекте внешнего кода (т.е. втором уровне кодирования). Такой проект может быть предпочтительным в том смысле, что алгоритм устранения неоднозначности радиомаяка остается неизменным.
На фиг.6 представлена блок-схема, на которой изображен иллюстративный способ для кодирования и декодирования основанного на радиомаяке управляющего сигнала с каскадными кодами. Как изображено, процесс 600 включает в себя последовательность этапов, выполняемых передатчиком 605, за которыми следует последовательность этапов, выполняемых приемником 610.
В одном аспекте процесс 600 начинается с набора управляющих битов, принимаемых на этапе 615. Здесь должно быть понято, что управляющие биты могут исходить из самого передатчика (например, через интерфейс пользователя), или управляющие биты могут исходить извне, при этом передатчик может ретранслировать управляющую информацию. Далее на этапе 625 управляющие биты кодируются внешним кодером, причем такой код может включать в себя любую из множества схем кодирования, известных в данной области техники. После того как управляющие биты закодированы на этапе 625, процесс 600 переходит к этапу 635, где закодированные управляющие биты кодируются посредством второго уровня кода внутренним кодером. Многократно закодированные управляющие биты после этого модулируются и передаются в форме радиомаяков на этапе 645, как изображено. Радиомаяки, отправляемые на этапе 645, далее на этапе 620 принимаются приемником. После приема радиомаяков процесс 600 переходит к демодуляции в приемнике радиомаяков на этапе 630. Демодулированный поток данных после этого декодируется внутренним декодером на этапе 640 и далее на этапе 650 декодируется внешним декодером для восстановления исходного набора управляющих битов.
Здесь должно быть понято, что несмотря на то, что этапы 605 передатчика представлены так, что кодирование управляющих битов внешним кодером 625 имеет место до их кодирования внутренним кодером 635, в других вариантах осуществления внутреннее кодирование может иметь место до внешнего кодирования. Например, если внешний кодер использует помехоустойчивый код X, а внутренний кодер использует помехоустойчивый код Y, то этапы 605 передатчика могут включать в себя или порядок кодирования XY, или YX, при условии что этапы 610 приемника включают в себя согласующуюся схему декодирования.
На фиг.7 представлена блок-схема иллюстративной системы, которая обеспечивает кодирование и декодирование основанных на радиомаяке управляющих сигналов с каскадными кодами. В одном аспекте система 700 может быть использована в беспроводной сети связи для обеспечения возможности мобильным устройствам осуществлять связь друг с другом и/или с базовыми станциями. Как изображено, система 700 включает в себя один или несколько блоков 705 передатчика, передающих закодированные, основанные на радиомаяке управляющие данные в один или несколько блоков 710 приемника. Блок 705 передатчика и/или блок 710 приемника могут быть базовыми станциями, мобильными устройствами или другими компонентами системы, которые передают информацию.
В одном аспекте блок 705 передатчика может включать в себя компонент 715 процессора, компонент 725 памяти, приемный компонент 735, первый компонент 745 кодера, второй компонент 755 кодера, компонент 765 перемежителя, компонент 775 модулятора и компонент 785 передачи.
В одном аспекте компонент 715 процессора выполнен с возможностью исполнения машиночитаемых команд, относящихся к выполнению любой из множества функций. Компонент 715 процессора может быть одним процессором или множеством процессоров, выделенных для анализа информации, передаваемой из блока 705 передатчика, и/или формирования информации, которая может быть использована компонентом 725 памяти, приемным компонентом 735, первым компонентом 745 кодера, вторым компонентом 755 кодера, компонентом 765 перемежителя, компонентом 775 модулятора и/или компонентом 785 передачи. Кроме того, или в качестве альтернативы, компонент 715 процессора может быть выполнен с возможностью управления одним или несколькими компонентами блока 705 передатчика.
В другом аспекте компонент 725 памяти соединен с компонентом 715 процессора и выполнен с возможностью хранения машиночитаемых команд, исполняемых компонентом 715 процессора. Компонент 725 памяти может также быть выполнен с возможностью хранения данных любого из множества других типов, включающих в себя управляющие данные, принимаемые через приемный компонент 735, а также данные, формируемые любым из первого компонента 745 кодера, второго компонента 755 кодера, компонента 765 перемежителя, компонента 775 модулятора и/или компонента 785 передачи. Компонент 725 памяти может быть выполнен в нескольких разных конфигурациях, в том числе как оперативное запоминающее устройство, память с резервным батарейным питанием, жесткий диск, магнитная лента и т.д. На компоненте 725 памяти также могут быть реализованы различные признаки, например сжатие и автоматическое создание резервной копии (например, использование конфигурации избыточного массива из независимых дисков).
В еще одном аспекте приемный компонент 735 и компонент 785 передачи также соединены с компонентом 715 процессора и выполнены с возможностью обеспечения интерфейса блока 705 передатчика с внешними объектами. Например, приемный компонент 735 может быть выполнен с возможностью приема закодированных основанных на радиомаяке управляющих данных, передаваемых из других устройств (например, из других блоков 705 передатчика для ретрансляции таких данных в блок 710 приемника), тогда как компонент 785 передачи может быть выполнен с возможностью передачи закодированных основанных на радиомаяке управляющих данных в блок 710 приемника. Должно также быть понято, что так как управляющие данные, которые должны быть переданы, могут исходить из блока 705 передатчика, то компонент 735 приемника может быть выполнен с возможностью приема входных данных из других компонентов внутри блока 705 передатчика.
Согласно конкретному варианту осуществления управляющие данные, которые должны быть переданы, проходят через каждый из первого компонента 745 кодера и второго компонента 755 кодера для кодирования управляющих данных посредством двух уровней кода. Здесь должно быть понято, что любой из множества помехоустойчивых кодов может быть использован для выполнения любого из множества проектных заданий. Кроме того, несмотря на то что примеры, обеспеченные в этом описании, используют кодеры Рида-Соломона, специалисту в данной области техники будет понятно, что могут также быть реализованы другие схемы кодирования.
В некоторых аспектах блок 705 передатчика может также включать в себя компонент 765 перемежителя, который может быть выполнен с возможностью выполнения функции перемежения по времени и/или частоте на управляющих данных до, после и/или между двумя этапами кодирования. Компонент 775 модулятора может также содержаться и быть выполнен с возможностью модуляции закодированных/перемеженных данных в форме тонов радиомаяка, причем тоны радиомаяка далее передаются в блок 710 приемника через компонент 785 передачи.
Как изображено, блок 710 приемника может включать в себя любой из множества компонентов, в том числе компонент 720 процессора, компонент 730 памяти, приемный компонент 740, первый компонент 760 декодера, второй компонент 770 декодера, компонент 780 обращающего перемежителя и компонент 750 демодулятора.
В одном аспекте приемный компонент 740 выполнен с возможностью приема тонов радиомаяка, передаваемых из блока 705 передатчика, и компонент 720 процессора и компонент 730 памяти выполнены с возможностью обеспечения функций, обычно аналогичных компонентам 715 и 725, их дополняющей части в блоке 705 передатчика. В отношении оставшихся компонентов блока 710 приемника должно быть понято, что эти компоненты обычно выполнены с возможностью выполнения функций, которые дополняют компоненты дополняющей их части в блоке 705 передатчика. Например, первый компонент 760 декодера выполнен с возможностью декодирования кодирования первого компонента 745 кодера, второй компонент 770 декодера выполнен с возможностью декодирования кодирования второго компонента 755 кодера, компонент 780 обращающего перемежителя выполнен с возможностью устранения перемежения перемежения компонента 765 перемежителя, и компонент 750 демодулятора выполнен с возможностью демодуляции модуляции компонента 775 модулятора.
В последующем обсуждении обеспечены конкретные примеры того, как (обеспечивается) вышеупомянутый способ/система для использования каскадных кодов. В частности, обеспечены варианты осуществления кодирования/декодирования для демонстрации того, как каскадные коды могут быть использованы для регулирования вероятности ложного сигнала и увеличения количества управляющих битов, которое кодовое слово радиомаяка может переносить. Здесь должно быть понято, что такие варианты осуществления обеспечены только в целях иллюстрации и не должны рассматриваться как исчерпывающий список возможных применений.
На фиг.8 обеспечена блок-схема, иллюстрирующая показательный способ кодирования управляющих сигналов в форме радиомаяков посредством каскадных кодов для обеспечения множества уровней вероятности ложного сигнала. Как изображено, процесс 800 начинается на этапе 805, на котором принимаются управляющие данные. После приема управляющих данных они помещаются в буфер для внешнего кодера на этапе 810, причем внешний код может быть кодом с повторениями и/или хеш-функцией.
Далее, на этапе 815 принимается решение в отношении чувствительности управляющих данных. В частности, принимается решение в отношении того, должны ли управляющие данные быть закодированы посредством заданной по умолчанию вероятностной схемы ложного сигнала на этапе 825 или посредством пользовательской вероятностной схемы на этапе 820. Здесь следует отметить, что принятие решения о «чувствительности» на этапе 815 может включать в себя установление того, должна ли вероятность ложного сигнала управляющих данных быть ниже или выше, чем заданная по умолчанию вероятность ложного сигнала. На самом деле, так как заданная по умолчанию схема вероятности ложного сигнала может уже быть очень устойчивой к ошибкам, то некоторые варианты осуществления могут включать в себя определение того, какие наборы управляющих данных являются менее чувствительными по сравнению с другими управляющими сообщениями, и могут быть закодированы посредством схемы, которая использует меньше вычислительных ресурсов, чем заданная по умолчанию схема.
Для этого конкретного примера следует отметить, что если K информационных битов должны быть переданы со значительно более низкой вероятностью ложного сигнала, чем обычные сообщения радиомаяка (как в случае с «требующим особого внимания» управляющим сообщением, описанным ранее), то внешний кодер может присоединить K битов к другим K битам, которые являются хэшированным вариантом первых K битов. Может быть сделано большее количество хэшированных копий, что в результате приведет к n*K закодированным битам. Соответственно, в процессе 800 управляющие данные кодируются в форме n потока(ов) по K битов на этапе 830, причем значение n определяется или на этапе 820, или на этапе 825 в зависимости от чувствительности управляющих данных.
На этапе 835 процесс 800 далее продолжается с n потоком(ами) внешне закодированных управляющих битов, помещаемых в буфер для внутреннего кодера. В одном аспекте внутренний код может быть кодом Рида-Соломона, причем на этапе 840 внутренний кодер кодирует n поток(ов) по K битов в форме n потока(ов) по N битов. Каждый из n потока(ов) закодированных данных после этого на этапе 845 модулируется в форме радиомаяков и далее передается на этапе 850. Здесь, наряду с внешним/внутренним кодированием управляющих данных, следует отметить, что также может быть добавлен этап перемежения (не изображен), причем такой этап перемежения может быть добавлен перед, после и/или между этапами внешнего/внутреннего кодирования.
Согласно фиг.9 обеспечена блок-схема, иллюстрирующая показательный способ декодирования радиомаяков, сформированных процессом 800. Как изображено, процесс 900 начинается с радиомаяков, принимаемых приемником на этапе 905. Радиомаяки после этого на этапе 910 демодулируются в форме n потока(ов) по N закодированных битов и далее на этапе 915 помещаются в буфер для внутреннего декодера. Далее, на этапе 920 внутренний декодер декодирует каждый из n потока(ов) по N закодированных битов в форме n потока(ов) по K внешне закодированных битов, которые далее на этапе 925 помещаются в буфер для внешнего декодера.
На этапе 930 каждый из n потока(ов) по K внешне закодированных битов далее декодируется согласно схеме внешнего кодирования, используемой в процессе 800. Для этого конкретного примера предполагается, что управляющие данные были закодированы посредством схемы внешнего кодирования хеш-функцией и/или кодом с повторениями. Кроме того, для минимизации вероятности ложного сигнала конкретный набор управляющих данных может быть закодирован с включением в себя множества хэшированных вариантов управляющих данных (например, n хэш-вариантов). По существу, на этапе 935 принимается решение в отношении того, принято ли правильное количество хэшированных вариантов. Если это так, то предполагается, что управляющие данные не являются ложным сигналом, при этом управляющие данные далее выводятся на этапе 940. Иначе данные не выводятся, как изображено на этапе 945.
Согласно фиг.10 представлен иллюстративный процесс кодирования и декодирования для обеспечения более низкой вероятности ложного сигнала. Как изображено, процесс 1000 включает в себя обработку двух наборов управляющих данных, M и D, причем управляющие данные М передаются из блока 1010 передатчика в приемный блок 1020, а управляющие данные D передаются из блока 1030 передатчика в приемный блок 1040. Для этого примера на конкретных этапах процесса 1000 приведен иллюстративный размер в битах для каждого из управляющих данных М и D.
В одном аспекте управляющие данные М могут включать в себя десять битов, которые вводятся во внешний кодер 1012, как изображено. Для этого конкретного примера внешний кодер 1012 кодирует управляющие данные М в форме n потоков по K данных (например, первый 10-битовый поток КМ и второй 10-битовый поток K(M)HASH). Каждый из КМ и K(M)HASH после этого вводится во внутренний кодер 1014, в котором они кодируются в форме n потоков по N данных (например, первый 40-битовый поток NM и второй 40-битовый поток N(M)HASH). Блок 1010 передатчика после этого модулирует NM и N(M)HASH в форме радиомаяков, которые отправляются в приемный блок 1020 и принимаются приемным компонентом 1022.
После демодуляции принятых радиомаяков в форме NM и N(M)HASH внутренний декодер 1024 декодирует NM и N(M)HASH в форме КМ и K(M)HASH. Каждый из KM и K(M)HASH после этого вводится во внешний декодер 1026, как изображено. Здесь, если предполагается, что внешний декодер 1026 выполнен с возможностью декодирования KM, только если K(M)HASH также принят, то KM декодируется в форме управляющих данных М, так как на самом деле были приняты как KM, так и K(M)HASH.
Для этого конкретного примера управляющие данные D могут так же включать в себя десять битов и вводятся во внешний кодер 1032, как изображено. Внешний кодер 1032 может после этого кодировать управляющие данные D в форме n потоков по K данных (например, первый 10-битовый поток KD и второй 10-битовый поток K(D)HASH). Каждый из KD и K(D)HASH после этого вводится во внутренний кодер 1034, в котором они кодируются в форме n потоков по N данных (например, первый 40-битовый поток ND и второй 40-битовый поток N(D)HASH). Блок 1030 передатчика после этого модулирует ND и N(D)HASH в форме радиомаяков, которые отправляются в приемный блок 1040.
Здесь в иллюстративных целях предполагается, что произошла такая ошибка, что радиомаяки, принятые приемным компонентом 1042, ошибочно демодулированы в форме NM и N(D)HASH, которые вводятся во внутренний декодер 1044. Как изображено, внутренний декодер 1044 после этого декодирует NM и N(D)HASH в форме KM и K(D)HASH, которые вводятся во внешний декодер 1046. Здесь, если внешний декодер 1046 выполнен с возможностью декодирования KM, только если K(M)HASH также принят, то KM не будет декодироваться в форме управляющих данных М, так как K(M)HASH не был принят. На самом деле, для этого конкретного примера приемный блок 1040 не выводит ни управляющие данные М, ни управляющие данные D. Соответственно, схема каскадного кодирования, описанная в этом документе, предотвратила вывод ложного сигнала управляющих данных М.
Согласно фиг.11 обеспечена блок-схема, иллюстрирующая показательный способ кодирования управляющих сигналов в форме радиомаяков посредством каскадных кодов для обеспечения увеличения количества управляющих сигналов для каждого кодового слова. Как изображено, процесс 1100 начинается на этапе 1105, на котором принимаются управляющие данные. После приема управляющих данных они помещаются в буфер для внешнего кодера на этапе 1110, причем внешний код может быть кодом Рида-Соломона.
Далее, на этапе 1115 принимается решение в отношении относительного размера в битах принятых управляющих данных. В частности, принимается решение в отношении того, превышают ли управляющие данные порог размера, чтобы определить, на какое количество сегментов n должны быть разделены, если вообще должны быть разделены, управляющие данные. Если управляющие данные не превышают порог размера, то на этапе 1120 принимается решение в отношении того, требуют ли управляющие данные «дополнения» на этапе 1122 (например, если размер управляющих данных является слишком маленьким, то к управляющим данным могут быть добавлены «дополняющие» биты. В одном аспекте после или определения того, что дополнение не требуется, на этапе 1120, или дополнения управляющих данных на этапе 1122, процесс 1100 переходит к этапу 1125, на котором количество сегментов n устанавливается в 1.
Однако если на этапе 1115 принимается решение о том, что управляющие данные действительно превышают порог размера, то процесс 1100 переходит к этапу 1130, на котором устанавливается соответствующее количество сегментов n. В одном аспекте для преодоления возможных проблем устранения неоднозначности разделение управляющих данных включает в себя достаточную величину избыточности для определения того, как восстанавливать n сегментов при декодировании. Здесь следует отметить то, что соответствующее значение n зависит от требуемой величины избыточности в битах, причем большее значение n обычно в результате приводит к большей надежности декодирования.
После определения надлежащего значения n или из этапа 1125, или из этапа 1130 процесс 1100 переходит к кодированию управляющих данных в форме n потока(ов) по K битов на этапе 1135. На этапе 1140 n поток(ов) внешне закодированных управляющих битов далее помещают в буфер для внутреннего кодера. В одном аспекте внутренний код может быть кодом Рида-Соломона, причем на этапе 1145 внутренний кодер кодирует n поток(ов) по K битов в форме n потока(ов) по N битов. Каждый из n потока(ов) закодированных данных после этого на этапе 1150 модулируется в форме радиомаяков и далее передается на этапе 1155. Здесь, наряду с внешним/внутренним кодированием управляющих данных, следует отметить, что также может быть добавлен этап перемежения (не изображен), причем такой этап перемежения может быть добавлен перед, после и/или между этапами внешнего/внутреннего кодирования.
Согласно фиг.12 обеспечена блок-схема, иллюстрирующая показательный способ декодирования радиомаяков, сформированных процессом 1100. Как изображено, процесс 1200 начинается с радиомаяков, принимаемых приемником на этапе 1205. Радиомаяки после этого на этапе 1210 демодулируются в форме n потока(ов) по N закодированных битов и далее на этапе 1215 помещаются в буфер для внутреннего декодера. Далее на этапе 1220 внутренний декодер декодирует каждый из n потока(ов) по N закодированных битов в форме n потока(ов) по K внешне закодированных битов, которые далее на этапе 1225 помещаются в буфер для внешнего декодера.
На этапе 1230 каждый из n потока(ов) по K внешне закодированных битов далее декодируется согласно схеме внешнего кодирования, используемой в процессе 1100. В этом примере, например, на этапе 1235 может приниматься решение в отношении того, соответствует ли конкретный поток из K битов всему кодовому слову радиомаяка. Если это так, то на этапе 1255 принимается решение в отношении того, включают ли в себя K битов дополняющие биты, которые далее могут быть удалены на этапе 1260. В одном аспекте после или определения на этапе 1255, что дополняющие биты не присутствуют, или удаления дополняющих битов на этапе 1260, процесс 1200 завершается на этапе 1265, на котором кодовое слово декодировано и выводится в форме управляющих данных.
Однако, если на этапе 1235 определено, что конкретный поток из K битов соответствует только части кодового слова радиомаяка, то процесс 1200 на этапе 1240 определяет, может ли неполное кодовое слово быть дополнено ранее сохраненным неполным кодовым словом, принимаемым из этапа 1245. Если неполное кодовое слово нельзя дополнить ни одним из ранее сохраненных неполных кодовых слов, то оно сохраняется в памяти на этапе 1245. Однако, если на этапе 1240 определено, что неполное кодовое слово на самом деле может быть дополнено сохраненным неполным кодовым словом, то на этапе 1250 определяется, получается ли в результате объединения упомянутых дополняющих неполных кодовых слов «полное» кодовое слово. Если объединенные неполные кодовые слова действительно представляют полное кодовое слово, то процесс 1200 завершается на этапе 1265, на котором кодовое слово является декодированным и выводится в форме управляющих данных. Иначе, если объединенные неполные кодовые слова не представляют полное кодовое слово, то они сохраняются в памяти на этапе 1245.
Для лучшей иллюстрации полезности реализации схемы каскадного кодирования в отношении увеличения количества управляющих битов, которое кодовое слово может переносить, на фиг.13 обеспечен иллюстративный процесс кодирования/декодирования, который использует один кодер/декодер для обработки «большого» управляющего кодового слова. Для этого конкретного примера предполагается, что ограничения на декодирование внутреннего декодера обеспечивают то, что только 40 битов закодированных управляющих данных (N) могут быть декодированы в любое данное время. Также предполагается, что размер алфавита (Q) равен 32, и что внутренний кодер кодирует 10 управляющих битов (K) в форме 40 закодированных битов (N). Соответственно, ограничения на декодирование этой одной системы кодера/декодера не допускают кодирование управляющих данных K, длина которых больше, чем два информационных символа (т.е. два 5-битовых информационных символа), так как декодер не может декодировать кодовые слова N, длина которых больше, чем восемь закодированных символов (т.е. восемь 5-битовых информационных символов).
Как изображено, процесс 1300 включает в себя каждый из блоков 1310 и 1320 передатчика при попытке соответственно передать управляющие данные A и B в блок 1330 приемника. Однако, так как длина каждого из управляющих данных A и B составляет 20 битов, то внутренние кодеры 1312 и 1322 пытаются соответственно разделить A и B на два 10-битовых потока данных (т.е. A разделяется на A1 и A2, тогда как B разделяется на B1 и B2). Приемный компонент 1332 тогда принимает закодированные 40-битовые варианты A1, A2, B1 и B2, как изображено, причем A1, A2, B1 и B2 могут приниматься асинхронно. Здесь, однако, внутренний декодер не может устранять неоднозначность A1, A2, B1 и B2 для надлежащего восстановления каждого из управляющих данных A и B. Кроме того, из-за этой проблемы устранения неоднозначности процесс 1300 может ошибочно восстанавливать управляющие данные A и B в форме A1B2 и B1A2, как изображено.
Согласно фиг.14 обеспечен иллюстративный процесс, который использует каскадные коды для кодирования/декодирования управляющих данных A и B процесса 1300. Здесь снова предполагается, что ограничения на декодирование внутреннего декодера обеспечивают то, что только 40 битов закодированных управляющих данных N могут быть декодированы в любое данное время, и что размер алфавита Q снова равен 32.
Как изображено, аналогично процессу 1300, процесс 1400 включает в себя каждый из блоков 1410 и 1420 передатчика при попытке соответственно передать управляющие данные A и B в блок 1430 приемника. Здесь, однако, управляющие данные A и B соответственно вводятся во внешние кодеры 1412 и 1422, в которых они разделяются на три 10-битовых потока данных (т.е. A разделяется на A1, A2 и A3, тогда как B разделяется на B1, B2 и B3). Кроме того, управляющие данные A и B, длина каждого из которых составляет 20 битов, соответственно кодируются в форме 30 битов (т.е. три 10-битовых потока данных для каждого из управляющих данных A и B), которые включают в себя набор избыточных битов. Как утверждалось ранее, несмотря на то что количество сегментов n здесь изображено равным трем, могут быть добавлены дополнительные сегменты для увеличения избыточности.
После кодирования управляющих данных A и B внешними кодерами 1412 и 1422, A1, A2 и A3 последовательно вводятся во внутренний кодер 1414, и B1, B2 и B3 последовательно вводятся во внутренний кодер 1424. Процесс 1400 переходит к приему приемным компонентом 1332 закодированных 40-битовых вариантов A1, A2, A3, B1, B2 и B3, как изображено, причем A1, A2, A3, B1, B2 и B3 могут приниматься асинхронно. После этого внутренний декодер 1434 последовательно декодирует эти 40-битовые варианты (не обязательно в этом порядке) для получения 10-битовых вариантов A1, A2, A3, B1, B2 и B3, которые далее вводятся во внешний декодер 1436. Внешний декодер 1436 после этого использует внешне закодированную избыточность A1, A2, A3, B1, B2 и B3 для надлежащего устранения неоднозначности управляющих данных A и B (т.е. управляющие данные A восстанавливаются посредством объединения A1, A2 и A3, тогда как управляющие данные B восстанавливаются посредством объединения B1, B2 и B3). Соответственно, количество управляющих битов, которое кодовое слово радиомаяка может переносить, было увеличено с десяти до двадцати посредством раскрытой схемы каскадного кодирования/декодирования.
Согласно фиг.15 обеспечена иллюстративная система связи 1500, реализованная согласно различным аспектам, включающая в себя множество сот: сота I 1502, сота М 1504. Здесь следует отметить, что соседние соты 1502, 1504 несколько перекрываются, как обозначено граничной областью 1568 соты, следовательно, с созданием потенциальной возможности для взаимных помех сигналов между сигналами, передаваемыми базовыми станциями в соседних сотах. Каждая сота 1502, 1504 системы 1500 включает в себя три сектора. Согласно различным аспектам также возможны соты, которые не были подразделены на множество секторов (N=I), соты с двумя секторами (N=2) и соты с большим количеством секторов, чем 3 сектора (N>3). Сота 1502 включает в себя первый сектор, сектор I 1510, второй сектор, сектор II 1512, и третий сектор, сектор III 1514. Каждый сектор 1510, 1512, 1514 имеет две граничных области сектора, причем каждая граничная область совместно используется двумя смежными секторами.
Граничные области сектора обеспечивают потенциальную возможность для взаимных помех сигналов между сигналами, передаваемыми базовыми станциями в соседних секторах. Линия 1516 представляет граничную область сектора между сектором I 1510 и сектором II 1512, линия 1518 представляет граничную область сектора между сектором II 1512 и сектором III 1514, линия 1520 представляет граничную область сектора между сектором III 1514 и сектором 1 1510. Аналогично, сота M 1504 включает в себя первый сектор, сектор I 1522, второй сектор, сектор II 1524, и третий сектор, сектор III 1526. Линия 1528 представляет граничную область сектора между сектором I 1522 и сектором II 1524, линия 1530 представляет граничную область сектора между сектором II 1524 и сектором III 1526, линия 1532 представляет граничную область между сектором III 1526 и сектором I 1522. Сота I 1502 включает в себя базовую станцию (BS), базовую станцию I 1506 и множество конечных узлов (EN) в каждом секторе 1510, 1512, 1514. Сектор I 1510 включает в себя EN(1) 1536 и EN(X) 1538, соединенные с BS 1506 через линии 1540, 1542 радиосвязи соответственно, сектор II 1512 включает в себя EN(1') 1544 и EN(X') 1546, соединенные с BS 1506 через линии 1548, 1550 радиосвязи соответственно, сектор III 1514 включает в себя EN(1") 1552 и EN(X") 1554, соединенные с BS 1506 через линии 1556, 1558 радиосвязи соответственно. Аналогично, сота М 1504 включает в себя базовую станцию М 1508 и множество конечных узлов (EN) в каждом секторе 1522, 1524, 1526. Сектор I 1522 включает в себя EN(1) 1536' и EN(X) 1538', соединенные с BS M 1508 через линии 1540', 1542' радиосвязи соответственно, сектор II 1524 включает в себя EN(1') 1544' и EN(X') 1546', соединенные с BS M 1508 через линии 1548', 1550' радиосвязи соответственно, сектор (III) 1526 включает в себя EN(1") 1552' и EN(X") 1554', соединенные с BS 1508 через линии 1556', 1558' радиосвязи соответственно.
Система 1500 также включает в себя узел 1560 сети, который соединен с BS I 1506 и BS М 1508 через сетевые соединения 1562, 1564 соответственно. Узел 1560 сети также соединен с другими узлами сети, например другими базовыми станциями, узлами сервера AAA, промежуточными узлами, маршрутизаторами и т.д. и Internet через сетевое соединение 1566. Сетевые соединения 1562, 1564, 1566 могут быть, например, оптоволоконными кабелями. Каждый конечный узел, например EN 1 1536, может быть беспроводным терминалом, включающим в себя передатчик, а также приемник. Беспроводные терминалы, например EN(1) 1536, могут перемещаться через систему 1500 и могут осуществлять связь через линии радиосвязи с базовой станцией в соте, в которой EN в настоящее время находится. Беспроводные терминалы (WT), например EN(1) 1536, могут осуществлять связь с равноправными узлами, например другими WT, в системе 1500 или вне системы 1500 через базовую станцию, например BS 1506, и/или узел 1560 сети. WT, например EN(1) 1536, могут быть мобильными устройствами связи, например сотовыми телефонами, карманными персональными компьютерами с беспроводными модемами и т.д. Соответствующие базовые станции выполняют распределение подмножеств тонов с использованием способа для периодов символа-полосы, отличного от способа, применяемого для распределения тонов, и с определением скачкообразной перестройки частоты тонов в остальные периоды символа, например в периоды, отличные от периодов символа-полосы. Беспроводные терминалы используют способ распределения подмножеств тонов вместе с информацией, принятой из базовой станции, например ID наклона базовой станции, информация о ID сектора для определения тонов, которые они могут использовать для приема данных и информации в конкретные периоды символа-полосы. Конструируется последовательность распределения подмножеств тонов согласно различным аспектам для разброса межсекторных и межсотовых взаимных помех по всем соответствующим тонам. Несмотря на то что система, являющаяся предметом (заявки), была описана, в основном, в контексте режима сотовой связи, должно быть понято, что могут быть доступными и применимыми множество режимов согласно аспектам, описанным в этом документе.
На фиг.16 изображена иллюстративная базовая станция 1600 согласно различным аспектам. Базовая станция 1600 реализует последовательности распределения подмножеств тонов, причем формируются другие последовательности распределения подмножеств тонов для соответствующих других типов сектора соты. Базовая станция 1600 может использоваться в качестве любой из базовых станций 1506, 1508 системы 1500 по фиг.15. Базовая станция 1600 включает в себя приемник 1602, передатчик 1604, процессор 1606, например CPU, интерфейс 1608 ввода/вывода и память 1610, соединенные вместе шиной 1609, по которой различные элементы 1602, 1604, 1606, 1608 и 1610 могут обмениваться данными и информацией.
Разделенная на сектора антенна 1603, соединенная с приемником 1602, используется для приема данных и других сигналов, например отчетов о канале, из передач беспроводных терминалов из каждого сектора в соте базовой станции. Разделенная на сектора антенна 1605, соединенная с передатчиком 1604, используется для передачи данных и других сигналов, например управляющих сигналов, пилот-сигнала, сигналов радиомаяка и т.д., в беспроводные терминалы 1700 (см. фиг.17) в каждом секторе соты базовой станции. В различных аспектах базовая станция 1600 может применять множество приемников 1602 и множество передатчиков 1604, например отдельные приемники 1602 для каждого сектора и отдельный передатчик 1604 для каждого сектора. Процессор 1606 может быть, например, универсальным центральным процессором (CPU). Процессор 1606 управляет функционированием базовой станции 1600 под управлением одной или нескольких стандартных программ 1618, хранящихся в памяти 1610, и реализует способы. Интерфейс 1608 I/O (ввода-вывода) обеспечивает соединение с другими узлами сети с соединением BS 1600 с другими базовыми станциями, маршрутизаторами доступа, узлами сервера AAA и т.д., другими сетями и Internet. Память 1610 содержит стандартные программы 1618 и данные/информацию 1620.
Данные/информация 1620 включают в себя данные 1636, информацию 1638 о последовательности распределения подмножеств тонов, включающую в себя информацию 1640 о времени символа-полосы нисходящей линии связи и информацию 1642 о тонах нисходящей линии связи, и данные/информацию (info) 1644 о беспроводном терминале (WT), включающие в себя множество наборов информации о WT: информация 1646 о WT1 и информация 1660 о WT N. Каждый набор информации о WT, например информация 1646 о WT1, включает в себя данные 1648, ID 1650 терминала, ID 1652 сектора, информацию 1654 о канале восходящей линии связи, информацию 1656 о канале нисходящей линии связи и информацию 1658 о режиме.
Стандартные программы 1618 включают в себя стандартные программы 1622 передачи информации и стандартные программы 1624 управления базовой станцией. Стандартные программы 1624 управления базовой станцией включают в себя модуль 1626 планировщика и стандартные программы 1628 сигнализации, включающие в себя стандартную программу 1630 распределения подмножеств тонов для периодов символа-полосы, другую стандартную программу 1632 скачкообразной перестройки частоты распределения тонов нисходящей линии связи для остальных периодов символа, например периодов, отличных от периода символа-полосы, и стандартную программу 1634 радиомаяка.
Данные 1636 включают в себя данные, которые должны быть переданы, которые отправляются в кодер 1614 передатчика 1604 для кодирования до передачи в терминалы WT, и принятые данные из терминалов WT, которые обрабатываются через декодер 1612 приемника 1602 после приема. Информация 1640 о времени символа-полосы нисходящей линии связи включает в себя информацию о структуре синхронизации кадра, например информацию о структуре ультравременного интервала, временного интервала радиомаяка и супервременного интервала, и информацию, задающую то, является ли данный период символа периодом символа-полосы, и если это так, то индекс периода символа-полосы, и является ли символ-полосы точкой возврата в исходное положение для усечения последовательности распределения подмножеств тонов, используемой базовой станцией. Информация 1642 о тонах нисходящей линии связи включает в себя информацию, включающую в себя частоту несущей, назначенную базовой станции 1600, количество и частоту тонов и набор подмножеств тонов, которые должны быть распределены периодам символа-полосы, и другие специфические значения сектора и соты, например наклон, индекс наклона и тип сектора.
Данные 1648 могут включать в себя данные, которые WTl 1700 принял из равноправного узла, данные, которые WT1 1700 требуется передать в равноправный узел, и информацию обратной связи отчета о качестве канала нисходящей линии связи. ID 1650 терминала является ID, который назначен базовой станцией 1600, который идентифицирует WT1 1700. ID 1652 сектора включает в себя информацию, идентифицирующую сектор, в котором функционирует WTl 1700. ID 1652 сектора может использоваться, например, для определения типа сектора. Информация 1654 о канале восходящей линии связи включает в себя информацию, идентифицирующую сегменты канала, которые распределены планировщиком 1626 для использования терминалом WTl 1700, например сегменты информационного канала восходящей линии связи для данных, выделенные каналы управления восходящей линии связи для запросов, регулирования мощности, управления таймингом и т.д. Каждый канал восходящей линии связи, назначенный WTl 1700, включает в себя один или несколько логических тонов, причем каждый логический тон вытекает логически из последовательности скачкообразной перестройки частоты восходящей линии связи. Информация 1656 о канале нисходящей линии связи включает в себя информацию, идентифицирующую сегменты канала, которые распределены планировщиком 1626 для переноса данных и/или информации в WTl 1700, например сегменты информационного канала нисходящей линии связи для данных пользователя. Каждый канал нисходящей линии связи, назначенный WTl 1700, включает в себя один или несколько логических тонов, причем каждый вытекает логически из последовательности скачкообразной перестройки частоты нисходящей линии связи. Информация 1658 о режиме включает в себя информацию, идентифицирующую состояние функционирования WTl 1700, например режим ожидания, удержание линии, «включено».
Стандартные программы 1622 управляют базовой станцией 1600 для выполнения различных операций для передачи информации и реализуют различные протоколы связи. Стандартные программы 1624 управления базовой станцией используются для управления базовой станцией 1600 для выполнения основных функциональных задач базовой станции, например прием и формирование сигнала, планирование, и для реализации этапов способа нескольких аспектов, включающих в себя передачу сигналов в беспроводные терминалы с использованием последовательностей распределения подмножеств тонов в течение периодов символа-полосы.
Стандартная программа 1628 сигнализации управляет функционированием приемника 1602 посредством его декодера 1612 и передатчика 1604 посредством его кодера 1614. Стандартная программа 1628 сигнализации отвечает за управление формированием передаваемых данных 1636 и управляющей информации. Подпрограмма 1630 распределения подмножеств тонов конструирует подмножество тонов, которое должно использоваться в периоде символа-полосы, с использованием способа аспекта и с использованием данных/информации 1620, включающих в себя информацию 1652 о времени символа-полосы нисходящей линии связи и ID 1640 сектора. Последовательности распределения подмножеств тонов нисходящей линии связи являются разными для каждого типа сектора в соте и разными для смежных сот. WT 1700 принимают сигналы в периоды символа-полосы согласно последовательностям распределения подмножеств тонов нисходящей линии связи, причем базовая станция 1600 использует идентичные последовательности распределения подмножеств тонов нисходящей линии связи для формирования передаваемых сигналов. Другая стандартная программа 1632 скачкообразной перестройки частоты распределения тонов нисходящей линии связи конструирует последовательности скачкообразной перестройки частоты тонов нисходящей линии связи с использованием информации, включающей в себя информацию 1642 о тонах нисходящей линии связи и информацию 1656 о канале нисходящей линии связи, для периодов символа, отличных от периодов символа-полосы. Последовательности скачкообразной перестройки частоты тонов данных нисходящей линии связи синхронизированы по всем секторам соты. Стандартная программа 1634 управляет передачей сигнала радиомаяка, например сигнала относительно высокой мощности, сосредоточенного на одном или нескольких тонах, которые могут использоваться в целях синхронизации, например для синхронизации структуры тайминга кадра сигнала нисходящей линии связи, и, следовательно, последовательности распределения подмножеств тонов в отношении границы ультравременного интервала.
На фиг.17 изображен иллюстративный беспроводной терминал (конечный узел) 1700, который может использоваться в качестве любого из беспроводных терминалов (конечных узлов), например EN(1) 1536, системы 1500, изображенной на фиг.15. Беспроводной терминал 1700 реализует последовательности распределения подмножеств тонов. Беспроводной терминал 1700 включает в себя приемник 1702, включающий в себя декодер 1712, передатчик 1704, включающий в себя кодер 1714, процессор 1706 и память 1708, которые соединены вместе шиной 1710, по которой различные элементы 1702, 1704, 1706, 1708 могут обмениваться данными и информацией. Антенна 1703, используемая для приема сигналов из базовой станции (и/или неравноправного беспроводного терминала), соединена с приемником 1702. Антенна 1705, используемая для передачи сигналов, например, в базовую станцию (и/или в неравноправный беспроводной терминал), соединена с передатчиком 1704.
Процессор 1706, например CPU, управляет функционированием беспроводного терминала 1700 и реализует способы посредством исполнения стандартных программ 1720 и с использованием данных/информации 1722 в памяти 1708.
Данные/информация 1722 включают в себя данные 1734 пользователя, информацию 1736 пользователя и информацию 1750 о последовательности распределения подмножеств тонов. Данные 1734 пользователя могут включать в себя данные, предназначенные для равноправного узла, которые маршрутизируются в кодер 1714 для кодирования до передачи передатчиком 1704 в базовую станцию, и данные, принятые из базовой станции, которые обработаны декодером 1712 в приемнике 1702. Информация 1736 пользователя включает в себя информацию 1738 о канале восходящей линии связи, информацию 1740 о канале нисходящей линии связи, информацию 1742 о ID терминала, информацию 1744 о ID базовой станции, информацию 1746 о ID сектора и информацию 1748 о режиме. Информация 1738 о канале восходящей линии связи включает в себя информацию, идентифицирующую сегменты каналов восходящей линии связи, которые назначены базовой станцией для использования беспроводным терминалом 1700 при передаче в базовую станцию. Каналы восходящей линии связи могут включать в себя информационные каналы восходящей линии связи, выделенные каналы управления восходящей линии связи, например каналы запроса, каналы управления мощностью и каналы управления таймингом. Каждый канал восходящей линии связи включает в себя один или несколько логических тонов, причем каждый логический тон вытекает логически из последовательности скачкообразной перестройки частоты тонов восходящей линии связи. Последовательности скачкообразной перестройки частоты восходящей линии связи отличаются между каждым типом сектора соты и между смежными сотами. Информация 1740 о канале нисходящей линии связи включает в себя информацию, идентифицирующую сегменты канала нисходящей линии связи, которые назначены базовой станцией WT 1700 для использования, когда базовая станция передает данные/информацию в WT 1700. Каналы нисходящей линии связи могут включать в себя информационные каналы нисходящей линии связи и каналы назначения, причем каждый канал нисходящей линии связи включает в себя один или несколько логических тонов, причем каждый логический тон вытекает логически из последовательности скачкообразной перестройки частоты нисходящей линии связи, которая синхронизирована между каждым сектором соты.
Информация 1736 пользователя также включает в себя информацию 1742 о ID терминала, которая является идентификацией, назначенной базовой станцией, информацию 1744 о ID базовой станции, которая идентифицирует конкретную базовую станцию, с которой WT установил связь, и информацию 1746 о ID сектора, которая идентифицирует конкретный сектор соты, в котором WT 1700 находится в настоящее время. ID 1744 базовой станции обеспечивает значение наклона соты, и информация 1746 о ID сектора обеспечивает тип индекса сектора, причем значение наклона соты и тип индекса сектора могут использоваться для получения последовательностей скачкообразной перестройки частоты тонов. Информация 1748 о режиме, также включенная в информацию 1736 пользователя, идентифицирует то, находится ли WT 1700 в режиме ожидания, режиме удержания линии или в режиме «включено».
Информация 1750 о последовательности распределения подмножеств тонов включает в себя информацию 1752 о времени символа-полосы нисходящей линии связи и информацию 1754 о тонах нисходящей линии связи. Информация 1752 о времени символа-полосы нисходящей линии связи включает в себя информацию о структуре синхронизации кадра, например информацию о структуре ультравременного интервала, временного интервала радиомаяка и супервременного интервала, и информацию, задающую то, является ли данный период символа периодом символа-полосы, и если это так, то индекс периода символа-полосы, и является ли символ-полосы точкой возврата в исходное положение для усечения последовательности распределения подмножеств тонов, используемой базовой станцией. Информация 1754 о тонах нисходящей линии связи включает в себя информацию, включающую в себя частоту несущей, назначенную базовой станции, количество и частоту тонов и набор подмножеств тонов, которые должны быть распределены периодам символа-полосы, и другие специфические значения сектора и соты, например наклон, индекс наклона и тип сектора.
Стандартные программы 1720 включают в себя стандартные программы 1724 передачи информации и стандартные программы 1726 управления беспроводным терминалом. Стандартные программы 1724 передачи информации управляют различными протоколами связи, используемыми WT 1700. Стандартные программы 1726 беспроводного терминала управляют основными функциональными возможностями беспроводного терминала 1700, включающими в себя управление приемником 1702 и передатчиком 1704. Стандартные программы 1726 управления беспроводного терминала включают в себя стандартную программу 1728 сигнализации. Стандартная программа 1728 сигнализации включает в себя стандартную программу 1730 распределения подмножеств тонов для периодов символа-полосы и другую стандартную программу 1732 скачкообразной перестройки частоты распределения тонов нисходящей линии связи для остальных периодов символа, например периодов, отличных от периода символа-полосы. Стандартная программа 1730 распределения подмножеств тонов использует данные/информацию 1722 пользователя, включающие в себя информацию 1740 о канале нисходящей линии связи, информацию 1744 о ID базовой станции, например индекс наклона и тип сектора, и информацию 1754 о тонах нисходящей линии связи для формирования последовательностей распределения подмножеств тонов нисходящей линии связи согласно некоторым аспектам и обработки принятых данных, переданных из базовой станции. Другая стандартная программа 1730 скачкообразной перестройки частоты распределения тонов нисходящей линии связи конструирует последовательности скачкообразной перестройки частоты тонов нисходящей линии связи с использованием информации, включающей в себя информацию 1754 о тонах нисходящей линии связи и информацию 1740 о канале нисходящей линии связи, для периодов символа, отличных от периодов символа-полосы. Стандартная программа 1730 распределения подмножеств тонов при исполнении процессором 1706 используется для определения того, когда и на каких тонах беспроводной терминал 1700 должен принимать один или несколько сигналов символа-полосы из базовой станции 1500. Стандартная программа 1730 скачкообразной перестройки частоты распределения тонов восходящей линии связи использует функцию распределения подмножеств тонов вместе с информацией, принимаемой из базовой станции, для определения тонов, на которых она должна передавать.
Согласно фиг.18 изображена система 1800, которая обеспечивает возможность кодирования управляющего сигнала в форме радиомаяка в среде беспроводной связи с использованием каскадных кодов. Система 1800 может находиться, например, в пределах базовой станции или беспроводного терминала. Как изображено, система 1800 включает в себя функциональные блоки, которые могут представлять функции, реализуемые процессором, программным обеспечением или их комбинацией (например, программно-аппаратными средствами). Система 1800 включает в себя логическую группировку 1802 электрических компонентов, которые могут функционировать вместе. Как изображено, логическая группировка 1802 может включать в себя электрический компонент для приема набора управляющих битов 1810. Кроме того, логическая группировка 1802 может включать в себя один электрический компонент для кодирования управляющих битов посредством первого помехоустойчивого кода 1812 и другой электрический компонент для кодирования закодированных битов посредством второго помехоустойчивого кода 1814. Логическая группировка 1802 может также включать в себя электрический компонент для модуляции многократно закодированных управляющих битов в форме тонов 1816 радиомаяка, а также электрический компонент для передачи тонов 1818 радиомаяка. Кроме того, система 1800 может включать в себя память 1820, в которой хранятся команды для исполнения функций, связанных с электрическими компонентами 1810, 1812, 1814, 1816 и 1818. Несмотря на то что электрические компоненты 1810, 1812, 1814, 1816 и 1818, как изображено, являются внешними по отношению к памяти 1820, следует понимать, что они могут существовать в пределах памяти 1820.
Согласно фиг.19 изображена система 1900, которая обеспечивает возможность декодирования основанного на радиомаяке управляющего сигнала в среде беспроводной связи. Аналогично системе 1800, система 1900 может находиться в пределах базовой станции или беспроводного терминала, например, причем система 1900 также включает в себя функциональные блоки, которые могут представлять функции, реализуемые процессором, программным обеспечением или их комбинацией (например, программно-аппаратными средствами). Кроме того, система 1900 включает в себя логическую группировку 1902 электрических компонентов, которые могут действовать вместе аналогично логической группировке 1802 в системе 1800. Как изображено, логическая группировка 1902 может включать в себя электрический компонент для приема основанных на радиомаяке управляющих сигналов 1910. Кроме того, логическая группировка 1902 может включать в себя электрический компонент для демодуляции тонов 1912 радиомаяка. Логическая группировка 1902 может также включать в себя электрический компонент для декодирования первого уровня помехоустойчивого кода 1914, а также электрический компонент для декодирования второго уровня помехоустойчивого кода 1916. Кроме того, система 1900 может включать в себя память 1920, в которой хранятся команды для исполнения функций, связанных с электрическими компонентами 1910, 1912, 1914 и 1916 и 1818. Несмотря на то что электрические компоненты 1910, 1912, 1914 и 1916, как изображено, являются внешними по отношению к памяти 1920, следует понимать, что они могут существовать внутри памяти 1820.
В одном или более иллюстративных вариантах осуществления описанные функции могут быть реализованы в аппаратных средствах, программном обеспечении, программно-аппаратных средствах или любой их комбинации. Если функции реализованы в программном обеспечении, то они могут быть сохранены на машиночитаемом носителе информации или переданы через него в форме одной или нескольких команд или кода. Машиночитаемые носители информации включают в себя и носители информации компьютерного запоминающего устройства, и среды связи, включающие в себя любой носитель информации, который обеспечивает передачу компьютерной программы из одного места в другое. Носителями информации запоминающего устройства могут быть любые доступные носители информации, к которым можно получить доступ посредством компьютера. Например, такие машиночитаемые носители информации могут содержать RAM, ROM, EEPROM, CD-ROM или другой накопитель на оптических дисках, накопитель на магнитных дисках или другие магнитные запоминающее устройства, или любой другой носитель информации, который может использоваться для переноса или хранения требуемого кода программы в виде инструкций или структур данных, и к которому компьютер может получить доступ. Кроме того, любое соединение соответственно называют машиночитаемым носителем информации. Например, если программное обеспечение передают из web-сайта, сервера или другого удаленного источника с использованием коаксиального кабеля, оптоволоконного кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, например инфракрасного излучения, радиовещания и сверхвысокочастотных волн, то коаксиальный кабель, оптоволоконный кабель, витую пару, DSL или беспроводные технологии, например инфракрасное излучение, радиовещание и сверхвысокочастотные волны, включают в определение носителя информации. Диск и немагнитный диск, как используется в этом описании, включают в себя компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкий диск и диск блю-рей (blu-ray), где диски обычно воспроизводят данные магнитным способом, в то время как немагнитные диски воспроизводят данные оптически посредством лазеров. Комбинации приведенных выше носителей также следует отнести к машиночитаемым носителям информации.
Когда варианты осуществления реализованы в программном коде или кодовых сегментах, должно быть понято, что кодовый сегмент может представлять процедуру, функцию, подпрограмму, программу, стандартную программу, стандартную подпрограмму, модуль, пакет программ, класс или любую комбинацию команд, структур данных или операторов программы. Кодовый сегмент может быть соединен с другим кодовым сегментом или жестко смонтированной схемой посредством передачи и/или приема информации, данных, аргументов, параметров или содержимого памяти. Информацию, аргументы, параметры, данные и т.д. можно переправлять, пересылать или передавать с использованием любых подходящих средств, включающих в себя разделение памяти, передачу сообщений, передачу маркера, передачу через сеть и т.д. Кроме того, в некоторых аспектах этапы и/или действия способа или алгоритма могут находиться в форме одного кода или любой комбинации или набора кодов и/или команд на машиночитаемом носителе информации и/или считываемом компьютером носителе информации, который может быть включен в компьютерный программный продукт.
Для реализации программными средствами описанные в этом документе способы могут быть реализованы посредством модулей (например, процедур, функций и т.д.), которые выполняют описанные в этом документе функции. Коды программного обеспечения могут храниться в блоках памяти и исполняться процессорами. Блок памяти можно реализовать внутри процессора или вне процессора, в последнем случае его можно коммуникативно соединять с процессором различными способами, известными в данной области техники.
Для реализации аппаратными средствами процессоры могут быть реализованы в одном или нескольких специализированных интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), пользовательских программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, предназначенных для выполнения описанных в этом документе функций, или их комбинациях.
Описанное выше содержит примеры одного или нескольких вариантов осуществления. Конечно, невозможно описать каждую возможную комбинацию компонентов или способов в целях описания вышеупомянутых вариантов осуществления, но специалист в данной области техники может понять, что возможны многие другие комбинации и перестановки различных вариантов осуществления. Соответственно, подразумевается, что описанные варианты осуществления охватывают все такие изменения, модификации и отклонения, которые находятся в пределах существа и объема прилагаемой формулы изобретения. Кроме того, поскольку термин «включает в себя» используется или в подробном описании, или в формуле изобретения, подразумевается, что такой термин означает «включающий в себя» подобно термину «содержащий», когда «содержащий» интерпретируют при использовании его в качестве переходного слова в пункте формулы изобретения.
Как используется в этом документе, термин «делать вывод» или «вывод» обычно относится к процессу рассуждения о состояниях или выведения состояний системы, среды и/или пользователя из ряда наблюдений, зафиксированных посредством событий и/или данных. Вывод может использоваться для идентификации конкретного контекста или действия, или может формировать распределение вероятностей по состояниям, например. Вывод может быть вероятностным, то есть вычисление распределения вероятностей по состояниям, представляющим интерес, на основе анализа данных и событий. Вывод может также относиться к способам, используемым для формирования высокоуровневых событий исходя из ряда событий и/или данных. Такой вывод в результате приводит к созданию новых событий или действий исходя из ряда наблюдаемых событий и/или сохраненных данных типа «событие», независимо от того, существует или нет взаимосвязь между близкими по времени событиями, и получены ли события и данные из одного или нескольких источников данных и событий.
Кроме того, подразумевается, что термины, как они используются в этой заявке, «компонент», «модуль», «система» и т.д. относятся к объекту, связанному с применением компьютера, или аппаратным средствам, или программно-аппаратным средствам, или комбинации аппаратных средств и программного обеспечения, или программному обеспечению, или исполняемому программному обеспечению. Например, компонент может быть процессом, исполняемым процессором, процессором, объектным файлом, исполняемым файлом, потоком управления, программой и/или компьютером и т.д. Например, как приложение, исполняемое на вычислительном устройстве, так и это вычислительное устройство могут быть компонентом. В пределах процесса и/или потока управления может находиться один или несколько компонентов, и компонент может быть локализован на одном компьютере и/или распределен между двумя или большим количеством компьютеров. Кроме того, эти компоненты можно исполнять с различных машиночитаемых носителей информации, на которых хранятся различные структуры данных. Компоненты могут обмениваться информацией посредством локальных и/или дистанционных процессов, например, согласно сигналу, содержащему один или несколько пакетов данных (например, данных из одного компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или через сеть, например Internet, с другими системами посредством упомянутого сигнала).


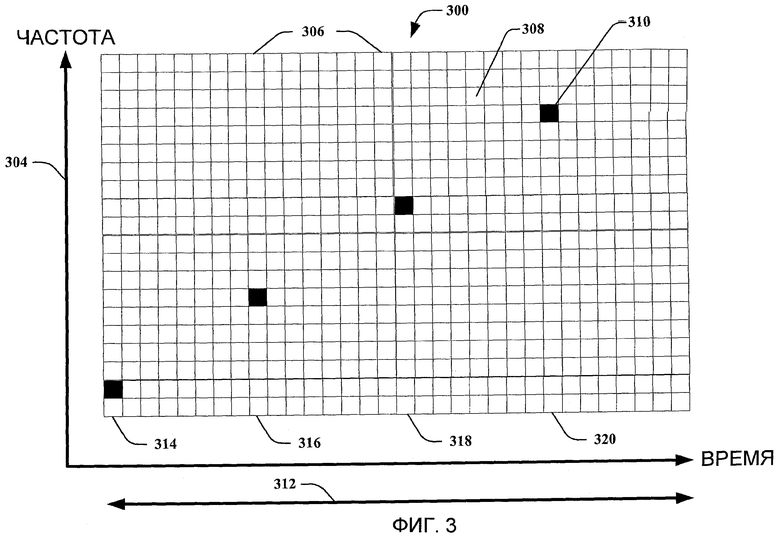
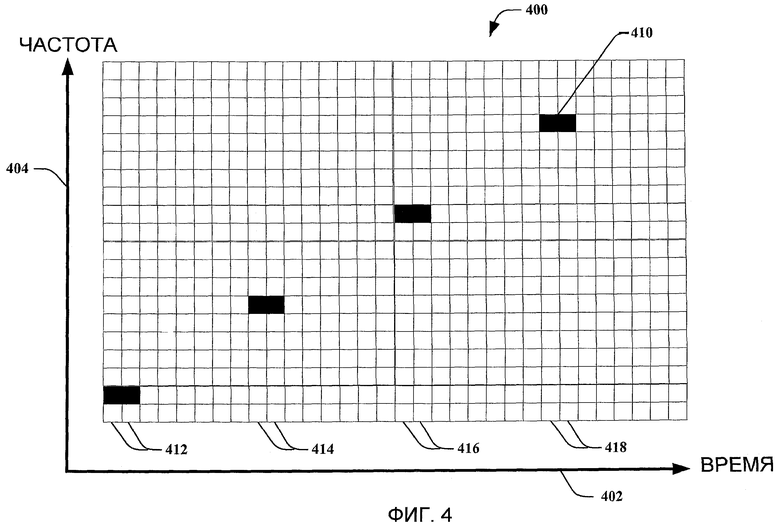



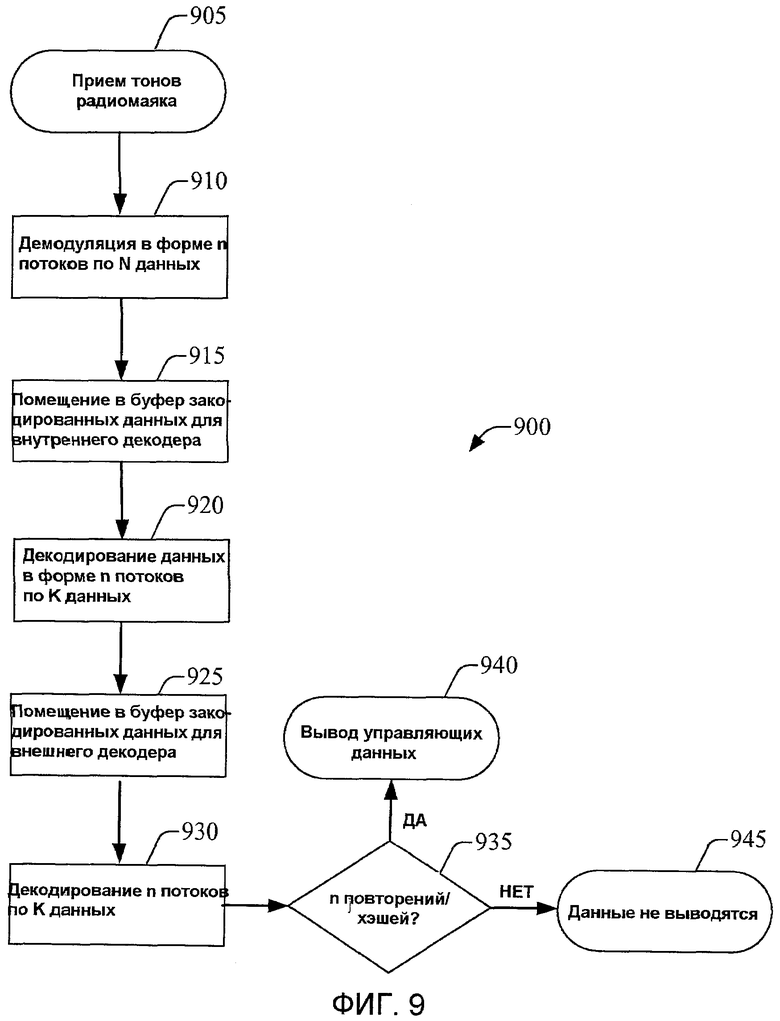



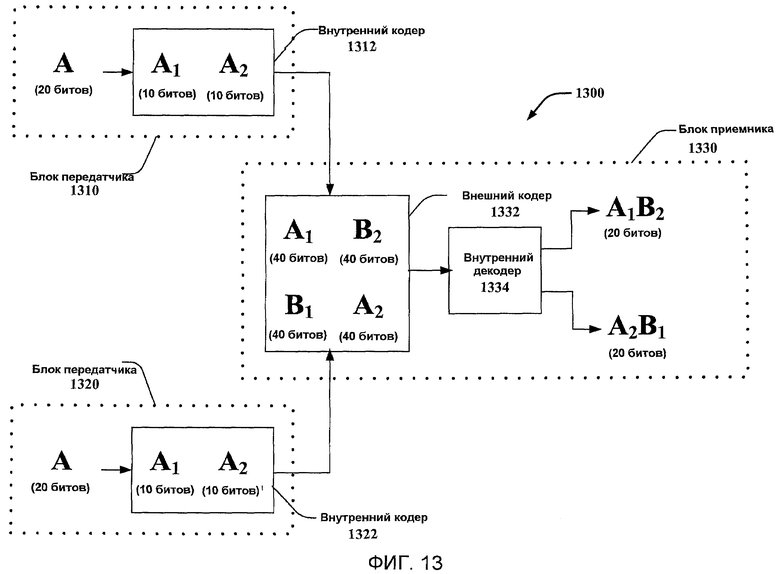
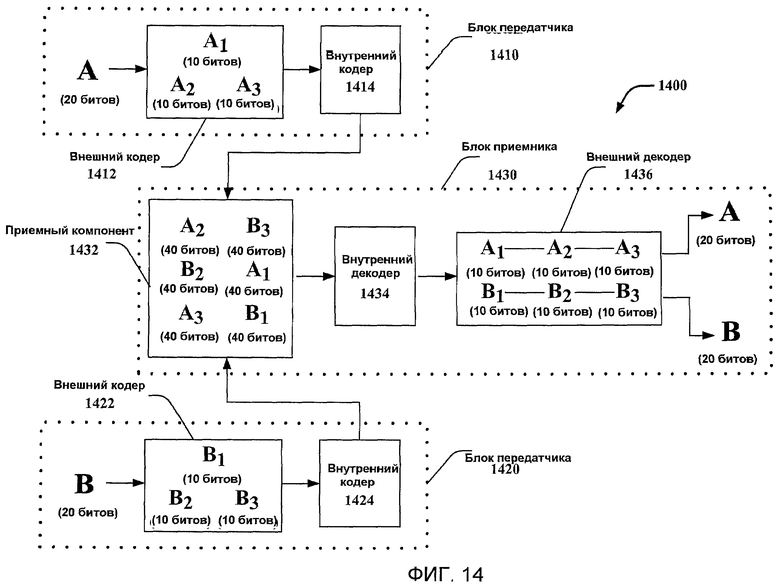
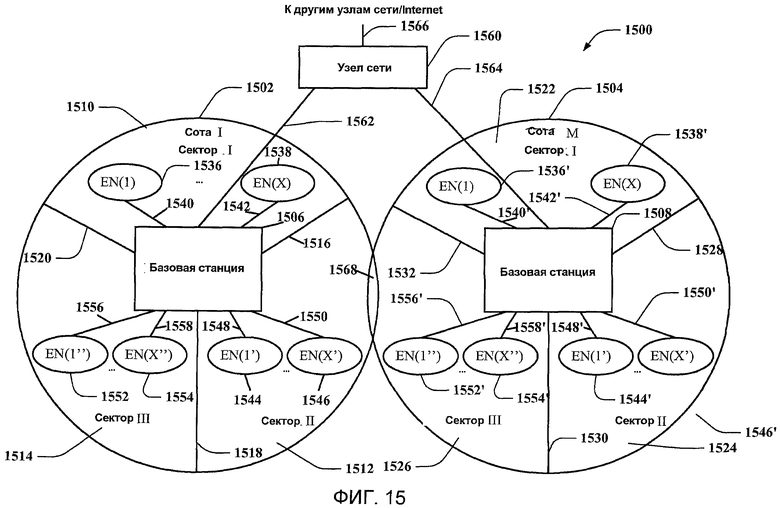
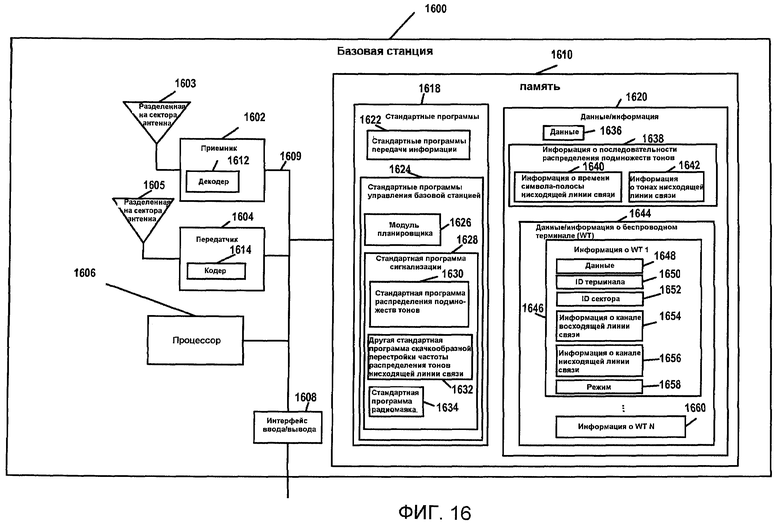
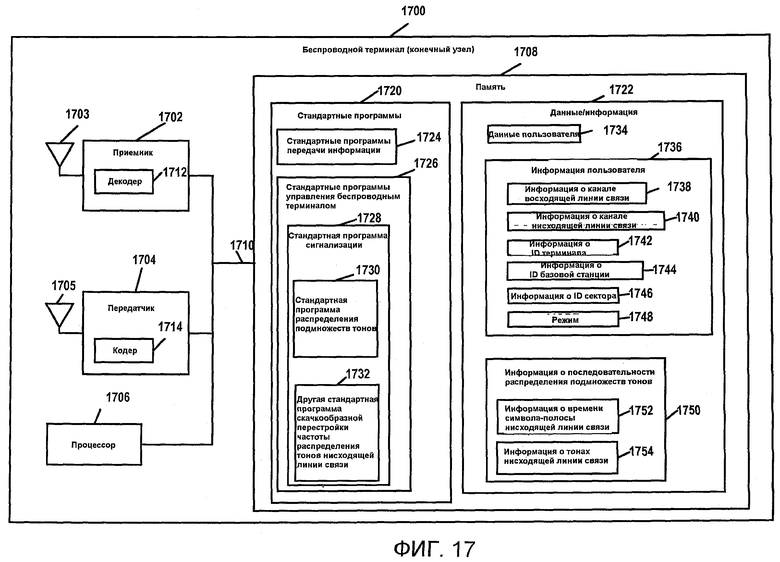

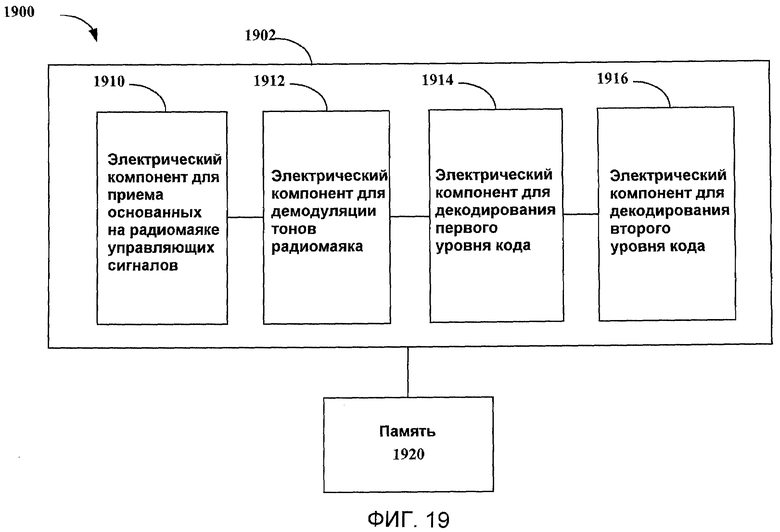
Изобретение относится к беспроводной связи, а более конкретно к способам и устройствам для кодирования управляющей информации. Для кодирования управляющие биты принимаются и кодируются посредством первого помехоустойчивого кода для создания первого набора закодированных битов. Закодированные биты далее кодируются посредством второго помехоустойчивого кода для создания второго набора закодированных битов, которые модулируются в форме тонов радиомаяка и после этого передаются. Для декодирования тоны радиомаяка, соответствующие набору управляющих битов, принимаются и после этого демодулируются для установления набора демодулированных битов. Демодулированные биты далее декодируются посредством декодера для установления набора декодированных битов. Декодированные биты далее декодируются посредством второго декодера для установления второго набора декодированных битов, который включает в себя набор управляющих битов. Технический результат - обеспечение устойчивого к ошибкам кодирования/декодирования управляющих данных, передаваемых в беспроводной среде с помехами. 10 н. и 22 з.п. ф-лы, 19 ил.
1. Способ кодирования управляющего радиосигнала, содержащий этапы, на которых:
принимают набор управляющих битов,
кодируют набор информационных битов посредством первого помехоустойчивого кода для создания первого набора закодированных битов,
кодируют первый набор закодированных битов посредством второго помехоустойчивого кода для создания второго набора закодированных битов,
модулируют второй набор закодированных битов в форме множества тонов радиомаяка и
передают множество тонов радиомаяка, причем каждый из множества тонов радиомаяка передается с соответствующим уровнем сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка.
2. Способ по п.1, причем, по меньшей мере, один из первого и второго этапов кодирования также включает в себя определение того, разделять ли управляющие биты или первый набор закодированных битов на множество потоков битов.
3. Способ по п.2, причем, по меньшей мере, один из первого или второго этапов кодирования также включает в себя разделение управляющих битов или первого набора закодированных битов на множество потоков битов, причем множество потоков битов включает в себя, по меньшей мере, первый поток битов и второй поток битов, причем, по меньшей мере, один бит в наборе управляющих битов или в первом наборе закодированных битов включается как в первый поток битов, так и во второй поток битов.
4. Способ по п.2, также содержащий этап, на котором устанавливают требуемую вероятность ложного сигнала для управляющих битов и разделение управляющих битов или первого набора закодированных битов как функцию требуемой вероятности ложного сигнала.
5. Способ по п.4, причем, по меньшей мере, один из первого и второго этапов кодирования также включает в себя исполнение одного из алгоритма хэширования и алгоритма с повторениями.
6. Способ по п.1, причем управляющие биты относятся к каналу управления.
7. Способ по п.6, в котором управляющие биты являются управляющими битами, соответствующими сообщению уменьшения взаимных помех.
8. Устройство для кодирования управляющего сигнала, содержащее:
приемный компонент, причем этот приемный компонент выполнен с возможностью приема набора управляющих битов,
первый компонент кодирования, причем этот первый компонент кодирования выполнен с возможностью кодирования набора управляющих битов посредством первого помехоустойчивого кода для создания первого набора закодированных битов,
второй компонент кодирования, причем этот второй компонент кодирования выполнен с возможностью кодирования первого набора закодированных битов посредством второго помехоустойчивого кода для создания второго набора закодированных битов,
модулирующий компонент, причем этот модулирующий компонент выполнен с возможностью модуляции второго набора закодированных битов в форме множества тонов радиомаяка, и
передающий компонент, причем этот передающий компонент выполнен с возможностью передачи множества тонов радиомаяка, причем каждый из множества тонов радиомаяка передается с соответствующим уровнем сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка.
9. Устройство по п.8, причем, по меньшей мере, один из первого и второго компонентов кодирования также выполнен с возможностью реализации кода Рида-Соломона или сверточного кода.
10. Устройство по п.8, причем, по меньшей мере, один из первого и второго компонентов кодирования также выполнен с возможностью определения того, разделять ли управляющие биты или первый набор закодированных битов на множество потоков битов.
11. Устройство по п.10, причем, по меньшей мере, один из первого или второго компонентов кодирования также выполнен с возможностью разделения управляющих битов или первого набора закодированных битов так, чтобы множество потоков битов включало в себя, по меньшей мере, первый поток битов и второй поток битов, причем, по меньшей мере, один бит в наборе управляющих битов или в первом наборе закодированных битов включался как в первый поток битов, так и во второй поток битов.
12. Устройство по п.8, также содержащее компонент перемежителя, причем этот компонент перемежителя выполнен с возможностью перемежения, по меньшей мере, одного из набора управляющих битов, первого набора закодированных битов и второго набора закодированных битов.
13. Устройство по п.12, причем компонент перемежителя выполнен с возможностью обеспечения, по меньшей мере, одной из функций перемежения времени или частоты.
14. Процессор, выполненный с возможностью кодирования управляющего радиосигнала, содержащий:
первый модуль для приема набора управляющих битов,
второй модуль для кодирования набора управляющих битов посредством первого помехоустойчивого кода для создания первого набора закодированных битов,
третий модуль для кодирования первого набора закодированных битов посредством второго помехоустойчивого кода для создания второго набора закодированных битов,
четвертый модуль для модуляции второго набора закодированных битов в форме множества тонов радиомаяка и
пятый модуль для передачи множества тонов радиомаяка, причем каждый из множества тонов радиомаяка передается с соответствующим уровнем сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка.
15. Машиночитаемый носитель информации, содержащий:
первый набор кодов для предписывания компьютеру принимать набор управляющих битов,
второй набор кодов для предписывания компьютеру кодировать набор управляющих битов посредством первого помехоустойчивого кода для создания первого набора закодированных битов,
третий набор кодов для предписывания компьютеру кодировать первый набор закодированных битов посредством второго помехоустойчивого кода для создания второго набора закодированных битов,
четвертый набор кодов для предписывания компьютеру модулировать второй набор закодированных битов в форме множества тонов радиомаяка и
пятый набор кодов для предписывания компьютеру передавать множество тонов радиомаяка, причем каждый из множества тонов радиомаяка передается с соответствующим уровнем сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка.
16. Устройство для кодирования управляющего сигнала радиомаяка, содержащее:
средство для приема набора управляющих битов,
средство для кодирования набора управляющих битов посредством первого помехоустойчивого кода для создания первого набора закодированных битов,
средство для кодирования первого набора закодированных битов посредством второго помехоустойчивого кода для создания второго набора закодированных битов,
средство для модуляции второго набора закодированных битов в форме множества тонов радиомаяка, и
средство для передачи множества тонов радиомаяка, причем каждый из множества тонов радиомаяка передается с соответствующим уровнем сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка.
17. Способ декодирования управляющего радиосигнала, содержащий этапы, на которых:
принимают множество основанных на радиомаяке тонов управления, соответствующих набору управляющих битов, причем каждый из множества тонов радиомаяка передается с использованием каскадного кода, детектируемого как имеющий соответствующий уровень сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка, и
демодулируют множество тонов радиомаяка, затем декодируют множество демодулированных тонов радиомаяка внутренним декодером и декодируют внешним декодером для восстановления исходного набора управляющих битов.
18. Способ по п.17, причем этап демодуляции также содержит этапы, на которых:
демодулируют множество тонов радиомаяка для установления набора демодулированных битов,
декодируют набор демодулированных битов посредством первого помехоустойчивого декодера для установления первого набора декодированных битов и
декодируют первый набор декодированных битов посредством второго помехоустойчивого декодера для установления второго набора декодированных битов, причем этот второй набор декодированных битов включает в себя набор управляющих битов.
19. Способ по п.18, причем, по меньшей мере, один из первого и второго этапов декодирования также включает в себя определение того, представляют ли демодулированные биты или первый набор декодированных битов неполное кодовое слово.
20. Способ по п.19, причем, по меньшей мере, один из первого и второго этапов декодирования также включает в себя идентификацию присутствия, по меньшей мере, одного избыточного бита.
21. Способ по п.20, причем, по меньшей мере, один из первого и второго этапов декодирования также включает в себя объединение неполного кодового слова с сохраненным неполным кодовым словом, причем этот этап объединения является функцией, по меньшей мере, одного избыточного бита.
22. Способ по п.18, причем, по меньшей мере, один из первого и второго этапов декодирования также включает в себя декодирование демодулированных битов или первого набора декодированных битов как функцию того, был ли принят, по меньшей мере, один из повторного варианта демодулированных битов или первого набора декодированных битов.
23. Способ по п.18, причем, по меньшей мере, один из первого и второго этапов декодирования также включает в себя декодирование демодулированных битов или первого набора декодированных битов как функцию того, был ли принят, по меньшей мере, один из хэшированного варианта демодулированных битов или первого набора декодированных битов.
24. Устройство декодирования основного на радиомаяке управляющего сигнала с каскадными кодами, содержащее:
приемный компонент, причем этот приемный компонент выполнен с возможностью приема множества основанных на радиомаяке тонов управления, соответствующих набору управляющих битов, причем каждый из множества тонов радиомаяка детектируется как имеющий соответствующий уровень сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка,
компонент демодулятора, причем этот компонент демодулятора выполнен с возможностью демодуляции множества тонов радиомаяка для установления набора демодулированных битов,
первый помехоустойчивый декодер, причем этот первый помехоустойчивый декодер выполнен с возможностью декодирования набора демодулированных битов согласно первому помехоустойчивому коду для установления первого набора декодированных битов, и
второй помехоустойчивый декодер, причем этот второй помехоустойчивый декодер выполнен с возможностью декодирования первого набора декодированных битов согласно второму помехоустойчивому коду для установления второго набора декодированных битов, причем этот второй набор декодированных битов включает в себя набор управляющих битов.
25. Устройство по п.24, причем, по меньшей мере, один из первого и второго помехоустойчивых декодеров также выполнен с возможностью определения того, представляют ли демодулированные биты или первый набор декодированных битов неполное кодовое слово.
26. Устройство по п.25, причем, по меньшей мере, один из первого и второго помехоустойчивых декодеров также выполнен с возможностью идентификации присутствия, по меньшей мере, одного избыточного бита и объединения неполного кодового слова с сохраненным неполным кодовым словом как функции, по меньшей мере, одного избыточного бита.
27. Устройство по п.24, причем, по меньшей мере, один из первого и второго помехоустойчивых декодеров также выполнен с возможностью декодирования демодулированных битов или первого набора декодированных битов как функции того, был ли принят, по меньшей мере, один из хэшированного варианта или повторного варианта демодулированных битов или первого набора декодированных битов.
28. Устройство по п.24, также содержащее компонент обращающего перемежителя, причем этот компонент обращающего перемежителя выполнен с возможностью устранения перемежения, по меньшей мере, одного из набора демодулированных битов, первого набора декодированных битов или второго набора декодированных битов.
29. Устройство по п.24, причем, по меньшей мере, один из первого и второго помехоустойчивых декодеров также выполнен с возможностью декодирования кода Рида-Соломона или сверточного кода.
30. Процессор, выполненный с возможностью декодирования управляющего радиосигнала, содержащий:
первый модуль для приема множества основанных на радиомаяке тонов управления, соответствующих набору управляющих битов, причем каждый из множества тонов радиомаяка детектируется как имеющий соответствующий уровень сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка,
второй модуль для демодуляции множества тонов радиомаяка для установления набора демодулированных битов,
третий модуль для декодирования набора демодулированных битов посредством первого помехоустойчивого декодера для установления первого набора закодированных битов и
четвертый модуль для декодирования первого набора декодированных битов посредством второго помехоустойчивого декодера для установления второго набора декодированных битов, причем этот второй набор декодированных битов включает в себя набор управляющих битов.
31. Машиночитаемый носитель информации, содержащий:
первый набор кодов для предписывания компьютеру принимать множество основанных на радиомаяке тонов управления, соответствующих набору управляющих битов, причем каждый из множества тонов радиомаяка детектируется как имеющий соответствующий уровень сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка,
второй набор кодов для предписывания компьютеру демодулировать множество тонов радиомаяка для установления набора демодулированных битов,
третий набор кодов для предписывания компьютеру декодировать набор демодулированных битов согласно первому помехоустойчивому алгоритму для установления первого набора декодированных битов и
четвертый набор кодов для предписывания компьютеру декодировать первый набор декодированных битов согласно второму помехоустойчивому алгоритму для установления второго набора декодированных битов, причем этот второй набор декодированных битов включает в себя набор управляющих битов.
32. Устройство декодирования основанного на радиомаяке управляющего сигнала, содержащее:
средство для приема множества основанных на радиомаяке тонов управления, соответствующих набору управляющих битов, причем каждый из множества тонов радиомаяка детектируется как имеющий соответствующий уровень сигнала радиомаяка, причем каждый из соответствующих уровней сигнала радиомаяка выше, чем каждый из множества уровней сигнала, соответствующих каждому из множества тонов не радиомаяка,
средство для демодуляции множества тонов радиомаяка для установления набора демодулированных битов,
средство для декодирования набора демодулированных битов посредством первого помехоустойчивого декодера для установления первого набора закодированных битов и
средство для декодирования первого набора декодированных битов посредством второго помехоустойчивого декодера для установления второго набора декодированных битов, причем этот второй набор декодированных битов включает в себя набор управляющих битов.
| US 2005233746 А, 20.10.2005 | |||
| RU 2002129901 A, 10.03.2004 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Послойный трехкомпонентный поглотитель фтора и фтористого водорода | 1986 |
|
SU1440532A1 |
| СПОСОБ И УСТРОЙСТВО ПОИСКА ПИЛОТ-СИГНАЛА В СОТОВОЙ СИСТЕМЕ СВЯЗИ | 1995 |
|
RU2150176C1 |
| Способ обработки сточных вод и устройство для его осуществления (его варианты) | 1978 |
|
SU1061705A3 |

