Область техники, к которой относится изобретение
Изобретение относится к способу получения параметра по данным измерений ядерно-магнитного резонанса (ЯМР). В частности, изобретение способствует повышению эффективности проведения каротажных исследований и оценки пластов породы по объединенным сигналам, получаемым из последовательностей из множества эхо-сигналов в разных диапазонах градиента магнитного поля.
Уровень техники
Новое поколение многочастотных приборов ядерно-магнитного каротажа способно воспринимать данные, полезные для определения свойств как материнской породы (например, пористости, наличия в ней связанных и подвижных флюидов, а также коэффициента проницаемости), так и пластового флюида. Однако для получения данных по этим двум направлениям исследования зачастую требуются неодинаковые наборы воспринимаемых параметров ЯМР и последовательностей эхо-сигналов. Чтобы получить высокоразрешающие характеристики породы, нужны такие схемы сбора данных, которые генерировали бы данные по эхо-сигналам с высоким уровнем отношения "сигнал-шум", не затрагивая разрешение по вертикали. Свойства флюида обычно изменяются с глубиной медленнее, чем свойства породы, однако для определения свойств флюида требуется такой режим восприятия данных по эхо-сигналам ЯМР, при котором контраст между различными флюидами (например, границы между газом, нефтью и водой) был бы максимальным. Такое восприятие данных лучше всего достигается при оптимальном варьировании в схеме восприятия комбинаций градиентов магнитного поля (G, сокр. от англ. "gradient"), временного интервала между эхо-сигналами (ТЕ, сокр. от англ. "echo time"), а также времени поляризации (задержки) (TW, сокр. от англ. "testing wave").
Ядерно-магнитный каротаж (ЯМК) основан на статических и динамических аспектах поведения спинов ядер под влиянием возбуждения радиоволнами в присутствии статического магнитного поля. Когда на совокупность магнитных моментов ядер, например, атомов водорода, воздействует статическое магнитное поле, магнитные моменты стремятся выстроиться в направлении магнитного поля, что обусловливает образование объемного намагничивания. Скорость установления равновесия при таком объемном намагничивании под воздействием статического магнитного поля характеризуется параметром, известным под названием времени спин-решеточной релаксации, T1. Другим родственным и часто используемым параметром ЯМК является время спин-спиновой релаксации T2 (оно называется также временем поперечной релаксации), которое представляет собой характеристическое время затухания, обусловленного неоднородностями локального магнитного поля над воспринимающим объемом каротажного инструмента. Оба времени релаксации наряду с силой намагничивания предоставляют информацию о пористости породы, составе и количестве пластового флюида и о других параметрах. Способы проведения внутрискважинных измерений ЯМР известны из уровня техники. Методики и устройства, пригодные для их осуществления, описаны в патентах US 4717877 (Taicher) и US 4710713 (Strikman).
Следующим измеряемым параметром при ЯМК является диффузия флюидов в породе. В общем, диффузия относится к движению атомов в газообразном и жидком состояниях, обусловленному их тепловой энергией. Важный параметр представляет собой самодиффузия, поскольку она обратно пропорциональна вязкости флюида, а последняя очень важна при исследовании скважин. В однородном магнитном поле диффузия мало влияет на скорость затухания измеряемых эхо-сигналов ЯМР. В присутствии же градиентного магнитного поля, хотя диффузное движение остается таким же, что и в отсутствие градиента поля, скорость дефазирования ядра значительно выше, что приводит к увеличению скорости (коэффициента) затухания. Скорость затухания пропорциональна G2D, где G - градиент магнитного поля, a D - величина коэффициента диффузии.
Одним из важных петрофизических параметров, который можно получить по диаграммам ЯМК, является объем капиллярно-связанной воды (BVI, сокр. от англ. "bound volume irreducible"). В известном из уровня техники обычном способе определения BVI для расчетов используется значение T2cutoff, при этом
где Р(Т2) - наблюдаемое распределение Т2 с дискретным компонентом Т2, выражаемом в виде
где Т2B - релаксация вмещаемого флюида, ρ - поверхностная релаксивность, S - площадь поверхности пор, V - объем пор, а T2 Diff - дополнительное время затухания, обусловленное влиянием диффузии. Член уравнения, описывающий диффузию,
определяется а) градиентом поля (G), связанным с частотой восприятия данных, б) интервалом между эхо-сигналами (ТЕ), параметром восприятия данных, в) коэффициентом диффузии (D), свойством флюида и г) гиромагнитным отношением (γ), свойством, зависящим от типа ядер. При ЯМК интерес обычно представляет только спин протонов. Имеет значение мультипликативный фактор G*TE, состоящий из двух параметров, изменяемых оператором. Очевидно, что данные, воспринимаемые с использованием неодинаковых значений факторов G*TE, приведут к различным наблюдаемым распределениям T2, P(T2). Уравнение (1) показывает, что при использовании одного и того же значения T2cutoff для расчета BVI одной и той же породы результаты для P(T2) могут зависеть от градиента и ТЕ. Если значение G*TE мало, то член Т-1 2 Diff вносит значительно меньший вклад в T2 -1 в уравнении (2), чем и член объемной релаксации флюида Т2B -1, и член поверхностной релаксации ρ (S/V). В таком случае, зависимостью T2 -1 от диффузии можно пренебречь. Однако, если значение G*TE велико, Т-1 2 Diff может превратиться в член, вносящий доминантный вклад в T2 -1.
Если не учитывать зависимость от аппаратурного воздействия и условий восприятия данных, значение T2cutoff определяется минералогическими свойствами поверхности породы. На практике принято калибровать T2cutoff по лабораторным замерам ЯМР. Такие лабораторные измерения часто производят на магнитно-полевых установках без наложения внешнего градиента, в связи с чем имеет место пренебрежимо малый вклад члена Т-1 2 Diff. Это не соответствует условиям, когда внешний градиент присутствует при измерениях каротажным прибором. Объединенная последовательность эхо-сигналов дает возможность использовать одиночное значение T2cutoff, согласующееся со значением T2cutoff, производным от результата лабораторного измерения на основе системы ЯМР, что дает возможность лучше объединить лабораторные результаты и результаты каротажа.
В патенте US 5212447 (Paltiel) описаны способ и устройство для определения константы самодиффузии пробуренных скважинами горных пород. В этом патенте сообщается о методике проведения внутрискважинных измерений ЯМР, включающей создание градиента магнитного поля в нужном положении внутри скважины, получение по меньшей мере одного, а предпочтительно, двух наборов данных ЯМР в присутствии градиента магнитного поля, определение влияния диффузии на затухание по меньшей мере первого эхо-сигнала и установление на этой основе коэффициента диффузии. Получение по меньшей мере одного набора данных ЯМР включает в себя восприятие двух наборов данных ЯМР, причем эти наборы должны различаться по меньшей мере одним из следующих параметров: промежутком времени, в течение которого молекулы имеют возможность диффундировать, значением градиента магнитного поля либо временем, в течение которого накладываются импульсы (при использовании импульсов градиента магнитного поля).
В патенте US 5698979 (Taicher) заявлен способ измерения свойств подвижности ядер внутри пор, расположенных в пористой среде. Способ включает в себя наложение статического магнитного поля на среду с целью поляризовать ядра, создание первого значения градиента магнитного поля внутри порового пространства среды, наложение радиочастотного электромагнитного поля для возбуждения ядер, получающих сигналы ЯМР от других ядер, и расчет свойств подвижности по скоростям затухания амплитуды сигналов ЯМР. В этом патенте описывается наложение статического магнитного поля, имеющего первую амплитуду, вторую амплитуду и градиент амплитуды, с последующим возбуждением ядер и получением сигналов резонанса на частотах, соответствующих областям, заданным первой и второй магнитными амплитудами. Расчет движения осуществляется по разностям скоростей затухания амплитуд резонансных сигналов первой и второй частот.
В патенте US 6316940 (Akkurt) заявлен способ разделения сигналов от различных флюидов с использованием подбираемых пользователем параметров измерения, который основан на форсировании диффузии в качестве доминантного механизма релаксации для фазы рассола в измерениях ЯМР геологической породы. Определенные параметры измерений изменяют для усиления роли релаксации диффузии в фазе рассола. Усиленная релаксация диффузии, в свою очередь, задает верхний предел для распределения Т2 фазы рассола, каковой предел можно рассчитать. Как только этот верхний предел найден, любая фаза, имеющая более продолжительное Т2, чем верхний предел, может быть однозначно классифицирована как не рассол. Варьируемыми параметрами измерения являются интервал времени между эхо-сигналами (ТЕ) и градиент магнитного поля (G) каротажного прибора.
В патенте US 6377042 (Menger) заявлены способ и система для получения данных ЯМР с повышенным разрешением путем объединения во временном интервале различных последовательностей эхо-импульсов ЯМР в единую последовательность эхо-сигналов. Входящие последовательности эхо-сигналов могут приниматься с различными значениями интервала между эхо-сигналами, времени ожидания и отношения сигнал-шум, причем эти параметры подвергаются оптимизации для обеспечения соответствия как быстрой, так и медленной частям спектра Т2. Объединенные последовательности эхо-сигналов в одну стадию инвертируют в полные спектры Т2, преодолевая таким образом неоднозначности и прочие ограничения способов уровня техники. В предпочтительном варианте процесс объединения априорно не нуждается в информации о Т1, и объединенные последовательности эхо-сигналов оптимизируют по отношению к разрешению Т2. В патенте US 6377042 заявлены инвертирование и накапливание входящих данных, включая частично и полностью восстановленные данные. На второй стадии рассчитывают разности между инвертированными данными для всех накопителей в пределах определенного диапазона, что дает возможность рассчитать "искусственную" последовательность эхо-сигналов, которую можно прибавить к оригинальным частично восстановленным данным. На третьей стадии данные объединяют с получением окончательной последовательности эхо-сигналов, которая считается входящей для стандартной инверсии Т2. Для получения более полных сведений о породе, необходимо учесть как можно больше параметров, включая изменения, касающиеся статического магнитного поля (т.е. градиент поля). В патенте US 6377042 упомянуто изменение параметров последовательности эхо-сигналов, но не говорится о влиянии изменений такого параметра, как градиент поля.
До настоящего времени при обработке во временной зоне с целью определения свойств пород, данные по множествам G, ТЕ и TW не комбинировали. Главным препятствием на этом пути является отсутствие простого способа суммирования различных данных G-TE. Общая практика, отчасти обусловленная аппаратурными ограничениями приборов ЯМК ранних выпусков, состоит в многократном проведении каротажа, каждый из этапов которого преследует отдельную цель исследований. Даже с применением многочастотных приборов, способных получать исчерпывающие данные за один проход, эти данные используются экономически неэффективно. Так, чтобы удовлетворить требованиям определения свойств породы и флюида, приходится либо проводить каротаж медленно, либо применять компромиссное значение разрешения по вертикали.
Исходя из вышеизложенного, очевидна необходимость разработки способа, который улучшил бы эффективность получения каротажной диаграммы и максимизировал экономичность использования всех данных. На решение данной задачи и направлено настоящее изобретение.
Краткое изложение сущности изобретения
В настоящем изобретении предлагаются устройство и способ определения интересующего параметра пласта горной породы с использованием каротажного прибора, вводимого в проходящую через толщу горных пород скважину. Последовательности из множества эхо-сигналов воспринимают из первой и второй интересующих зон при использовании последовательностей радиоимпульсов на первой и второй частотах. Определяют поправочный коэффициент, зависящий по меньшей мере частично от коэффициента диффузии флюида в породе, и объединяют первую и вторую последовательности из множества эхо-сигналов, используя поправочный коэффициент, с получением объединенной последовательности из множества эхо-сигналов. При этом вторая последовательности импульсов имеет по меньшей мере один параметр, отличающийся от аналогичного параметра первой последовательности импульсов, и/или градиент статического магнитного поля в первой отличен от градиента статического магнитного поля во второй зоне. В предпочтительном варианте изобретения используется многочастотный каротажный прибор, первая и вторая зоны различны, а статическое магнитное поле в первой зоне отлично от статического магнитного поля во второй зоне. Каротажный прибор содержит средство смещения статического магнитного поля в породе. Такое средство способно создавать ряд чувствительных объемов путем приема данных на разных радиочастотах. Способ может быть использован, когда первая последовательность радиоимпульсов отличается от второй последовательности радиоимпульсов частотой, соответствующей градиенту или распределению градиента, и/или интервалом между перефокусирующими импульсами. Способ может применяться во время поляризации и/или при одинаковых или различных количествах импульсов в обеих последовательностях. Поправочный коэффициент может представлять собой мультипликативный множитель, устанавливающий соотношение между первой и второй последовательностями из множества эхо-сигналов.
Поправочный коэффициент дополнительно может зависеть по меньшей мере от одного из следующего: (i) градиента статического магнитного поля, связанного с первой последовательностью радиоимпульсов, (ii) градиента статического магнитного поля, связанного со второй последовательностью радиоимпульсов, (iii) временного промежутка между эхо-сигналами, связанного с первой последовательностью радиоимпульсов, (iv) временного промежутка между эхо-сигналами, связанного со второй последовательностью радиоимпульсов, (v) уровня шума для первой последовательности из множества эхо-сигналов, и (vi) уровня шума для второй последовательности из множества эхо-сигналов.
Коэффициент диффузии флюида можно вывести из измеренного коэффициента диффузии с введением поправки на температуру флюида и/или глубину залегания флюида (либо давление в нем).
В дополнительных вариантах изобретения, в тех случаях, когда имеется разница в уровне шума в первой и второй последовательностях из множества эхо-сигналов, может использоваться умножение на зависимый от времени весовой коэффициент.
Когда первая и вторая последовательности радиоимпульсов различаются только временем ожидания, становится возможным по объединенной последовательности эхо-сигналов определить объемы глинисто-связанной воды и капиллярно-связанной воды. Когда первая и вторая последовательности импульсов различаются только частотой, по объединенной последовательности эхо-сигналов можно определить полное распределение пористости. Когда первая и вторая интересующие зоны разнятся по градиенту соответственного статического магнитного поля, по объединенной последовательности можно определить объемы глинисто-связанной воды и капиллярно-связанной воды, а также перемещаемые объемы флюида.
В предпочтительном варианте изобретения наиболее длинная последовательность эхо-сигналов получается при использовании самой высокой частоты. В дополнительном варианте изобретения, когда произведение градиента и интервала времени между эхо-сигналами для первой интересующей зоны отлично от произведения градиента и интервала времени между эхо-сигналами для второй интересующей зоны, способ включает интерполяцию с приведением частных значений к одинаковой плотности и применение зависимого от времени весового коэффициента.
Краткое описание чертежей
Ниже сущность изобретения поясняется на примере его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схематичное изображение расположенного эксцентрично в скважине прибора ЯМК,
на фиг.2, 2А и 2Б - компоновка магнитов, антенны и кожуха в настоящем изобретении для получения желательной конфигурации поля,
на фиг.3 - бок-схема способа сбора данных в предпочтительном варианте осуществления изобретения,
на фиг.4 - зависимость коэффициента диффузии воды от температуры,
на фиг.5А и 5Б - значения магнитного поля и градиента в зависимости от глубинности исследований,
на фиг.6 - блок-схема предпочтительного варианта осуществления предлагаемого в настоящем изобретении способа,
на фиг.7А-7Г - примеры затухания эхо-сигнала, обусловленного диффузией в градиентном поле,
на фиг.8 - расхождение между значениями T2cutoff, полученными в лабораторных условиях без наложения градиента и в градиентной среде нахождения каротажного прибора, и
на фиг.9 - блок-схема осуществления предлагаемого в настоящем изобретении способа в условиях варьирования нескольких параметров.
Описание предпочтительного варианта изобретения
Предлагаемый в настоящем изобретении способ заключается в объединении различных G-TE последовательностей из множества эхо-сигналов во временном интервале. Объединенные последовательности из множества эхо-сигналов могут быть использованы для определения объема глинисто-связанной воды и капиллярно-связанной воды, а также получения информации об общей пористости с улучшенным разрешением по вертикали. Те же данные, без объединения, используются для оценки свойств флюида. Таким образом, данные используются более рационально с экономической точки зрения.
На фиг.1 изображено устройство, подходящее для использования в данном изобретении. Скважина 10 пробурена обычным образом в толще подземных горных пород 12, обследуемой на наличие потенциальных углеводородсодержащих пластов (коллекторов). Прибор 14 ЯМК опускают в скважину 10, используя кабель 16 и соответственное наземное оборудование, схематически представленное барабаном 18, после чего ЯМК-прибор 14 поднимают с прохождением его по толще пород 12, содержащей ряд слоев 12а-12g различного состава, с целью проведения каротажа по одной или нескольким характеристикам породы. Прибор ЯМК снабжен дугообразными пружинами 22 для удерживания прибора в эксцентрическом положении внутри скважины таким образом, чтобы одна из сторон прибора находилась в близости к стенке скважины. Постоянные магниты, используемые для обеспечения статического магнитного поля, обозначены позицией 23, а конфигурация магнитов образует линейный диполь. Сигналы, генерируемые прибором 14 ЯМК, передаются на поверхность по кабелю 16, а от кабеля 16 - по другой линии 19 на соответствующее наземное оборудование 20 для обработки, записи и/или визуального отображения, либо к иному месту для обработки, записи и/или визуального отображения.
На фиг.2 схематически изображена компоновка магнитов, подходящая для использования в рамках настоящего изобретения при работе в градиентном поле. Этот прибор описан в патенте US 6348792 (Beard и соавт.), принадлежащем заявителю настоящего изобретения, содержание которого полностью включается в настоящее описание в качестве ссылки. Следует отметить, что предлагаемый в изобретении способ не ограничивается представленной частной компоновкой магнитов и может применяться как со смещенным от центра, так и с находящимся по центру скважины прибором или даже с прижимным каротажным зондом при единственном условии, что прибор работает в градиентном поле. Предлагаемый в изобретении способ может использоваться даже с одночастотным каротажным прибором. На поперечном сечении прибора на фиг.2 показаны основной магнит 217, второй магнит 218, а также антенна приемопередатчика, содержащая проводку 219 и сердечник 210. Стрелки 221 и 223 показывают поляризацию (например, от южного полюса к северному полюсу) основного магнита 217 и вторичного магнита 218, соответственно. Особенность компоновки, показанной на фиг.2, состоит в том, что поляризация магнитов, обеспечивающая статическое поле, направлена к боковой части прибора, а не к передней его части (правая сторона фиг.2), как в устройствах уровня техники. Значение такой развернутой компоновки обсуждается ниже.
Второй магнит 218 расположен таким образом, чтобы расширять форму статического магнитного поля путем добавления второго магнитного диполя в тесной близости к радиочастотному диполю, задаваемому проводкой 219 и магнитно-мягким сердечником 210. При этом центр эффективного статического диполя сдвигается ближе к радиочастотному диполю с соответственным повышением азимутального компонента в зоне исследования, о желательности чего говорилось выше. Второй магнит 218 также снижает влияние шунтирования основного магнита 217 магнитным сердечником 210, обладающего высокой проницаемостью. В отсутствие второго магнита поле постоянного тока накоротко шунтировалось бы сердечником 210. Таким образом, второй магнит помимо действия в качестве формирующего магнита, направляющего статическое поле к передней части прибора, играет также и роль компенсирующего магнита по отношению к статическому полю в сердечнике 210. Специалисты могут заметить, что компенсирующую функцию и в какой-то мере формирование поля можно было бы обеспечить просто путем создания разрыва в сердечнике. Однако, поскольку в предпочтительном варианте осуществления изобретения требуется определенная форма поля на передней стороне прибора, то, как для формирования поля, так и для обеспечения компенсирования служит второй магнит. Если статическое поле в сердечнике 210 близко к нулевому значению, то магнитострикционный эффект практически устраняется.
Как отмечалось выше, в зоне исследования градиент статического поля практически однороден, а напряженность поля лежит в заданных пределах, давая практически однородную ларморову частоту. Специалистам будет понятно, что сочетание формирования поля и компенсирования можно достичь при использовании и иных компоновок магнитов, чем те, что показаны на фиг.2. Например, на фиг.2А показаны одиночный магнит 227 и магнитный сердечник 230, которые продуцируют практически такое же статическое поле, которое получается сочетанием магнитов 217 и 218 на фиг.2. Практически аналогичные результаты по конфигурированию поля достигаются компоновкой магнита 237 и сердечника 240, показанной на фиг.2Б. Все компоновки магнитов на фиг.2, 2А и 2Б позволяют достичь асимметрии статического магнитного поля в направлении, перпендикулярном направлению намагничивания. В дополнительном варианте изобретения (не показан) второй магнит исключен.
Возвращаясь к фиг.2, следует отметить, что проводка 219 и части сердечника 210 в предпочтительном варианте должны отстоять друг от друга как можно дальше в пределах габарита прибора. Такое разнесение увеличивает эффективность антенны приемопередатчика за счет повышения эффективного радиочастотного диполя антенны и расширяет форму изолиний радиочастотного электромагнитного поля таким образом, что они лучше согласуются с изолиниями статического магнитного поля. Вторичный магнит в предпочтительном варианте изготавливают из непроводящего материала для сведения к минимуму вихревых токов, индуцируемых радиочастотным полем, повышая, таким образом, эффективность радиоантенны.
Сердечник в предпочтительном варианте изготавливают из порошкообразного магнитно-мягкого материала, не являющегося ферритом. В предпочтительном варианте он обладает высокой магнитной индукцией насыщения и содержит частицы порошкообразного материала, достаточно мелкие, чтобы быть прозрачными для радиочастотного электромагнитного поля. Такой материал описан в патенте US 6452388 (Reiderman и соавт.), содержание которого полностью включено в настоящее описание в виде ссылки. На фиг.3 показана блок-схема осуществления способа сбора данных в предпочтительном варианте изобретения. В этом предпочтительном варианте собираются данные многочастотного ЯМР (301). В альтернативном варианте могут собираться последовательности из множества эхо-сигналов на одной 5 частоте с различающимися параметрами каротажа, такими как ТЕ. Обычной последовательностью радиоимпульсов может быть импульсная последовательность Карра-Перселла-Мейбума-Гилла (КПМГ), хотя в предпочтительном варианте изобретения применяется оптимизированная последовательность перефокусирующих импульсов, в которой перефокусирующие импульсы имеют качающийся угол менее 180°. Такие модифицированные перефокусирующие импульсы описаны в патенте US 6163153 (Reiderman и соавт.) и в патенте US 6466013 (Slade и соавт.), причем оба эти патента принадлежат заявителю настоящего изобретения, а содержание этих патентов включено в настоящее описание в качестве ссылки. На полученные эхо-сигналы влияет ряд параметров радиочастотного поля, таких как интервал между эхо-сигналами (ТЕ), время ожидания (TW), число эхо-сигналов (NE, сокр. от англ. "number of echoes"), радиочастота (f), а также градиент магнитного поля (G). Интенсивность принятого сигнала прямо пропорциональна радиочастоте, а каждая из частот соответствует чувствительному объему, имеющему конкретный градиент напряженности магнитного поля. Вследствие диффузии, затухание эхо-сигнала усиливается с увеличением магнитного градиента. Скорость отбора данных обратно пропорциональна ТЕ. Влияние, оказываемое TW на сигнал, изменяется с углом поляризации, зависящим от типа присутствующего флюида.
Температура и давление в скважине, приблизительно равные этим показателям в породе, требуются для расчета коэффициента диффузии воды (рассола). Поэтому предлагаемый в изобретении способ включает в себя сбор данных по температуре в зависимости от глубины (303), а также по давлению в зависимости от глубины (305). Температура и давление входят в расчет коэффициента диффузии воды (307). Обычно коэффициент диффузии воды чувствителен к изменению температуры, но менее чувствителен к изменению давления. Поэтому, если непосредственный сбор данных по давлению не производился, для настоящего применения достаточно рассчитать давление по формуле градиента гидравлического давления. Кроме того, когда данные непосредственного измерения температуры недоступны, приемлемыми являются значения температуры породы, рассчитанные по геотермическому градиенту. В поправочном коэффициенте можно использовать значение коэффициента диффузии воды (рассола) даже если в состав флюидов, насыщающих породу, могут входить не вода, а другие флюиды. Метод введения поправочного коэффициента, описанный в настоящем изобретении, пригоден для оценки объема капиллярно-связанной воды и глинисто-связанной воды (CBW, сокр. от англ. "clay bound water"), а флюид в этих объемных фракциях представлен, прежде всего, водой. Далее, суммарный объем подвижного флюида (BVM, сокр. от англ. "bulk volume movable) можно рассчитать по разности между эффективной пористостью (МРНЕ) и BVI. Неопределенность в типах находящегося в породе флюида, влияющая на значение коэффициента диффузии, оказывает меньшее неблагоприятное влияние на эти ключевые петрофизические параметры. На фиг.4 показана зависимость коэффициента диффузии воды от температуры, основанная на опубликованных данных по вязкости и на корреляции величины Vinegar's D η. Эти данные по вязкости можно найти, например, в CRC Handbook of Chemistry and Physics. Для сглаживания функции используется полином пятого порядка. Температуру (в °С) откладывают вдоль абсциссы, а коэффициент диффузии воды (в см2/с) - по ординате (Dwater).
На фиг.5А показана напряженность магнитного поля (В) в зависимости от глубинности исследований (DOI, сокр. от англ. "depth of investigation"). Отложенное по оси ординат магнитное поле выражено в гауссах, а DOI - в дюймах. По мере увеличения DOI напряженность магнитного поля понижается. На фиг.5Б изображен ход градиента (G) магнитного поля в том же диапазоне DOI, причем градиент поля (гаусс/см) отложен вдоль оси ординат, а DOI (в дюймах) - вдоль абсциссы. Для каждого из приемов подбирают набор радиочастот ЯМР. Для заданной компоновки прибора значение приборного градиента известно как функция для каждой из частот.
Как правило, градиент магнитного поля возрастает с увеличением частоты для каротажного прибора, имеющего распределение напряженности магнитного поля, как это показано на фиг.5. В основном, на флюиды в поровом пространстве внутри породы действует полный градиент:

являющийся векторной суммой внешнего и внутреннего градиентов. Внутренний градиент возникает из-за различий в магнитной восприимчивости материнской породы и флюида. Он обычно зависит как от геометрии пор, так и от минералогического типа породы. Внутренний градиент, в принципе, может быть существенным фактором. Он не зависит от ТЕ и зависит от напряженности поля
и поэтому зависит от частоты (Δχ представляет разницу в магнитной восприимчивости флюида и твердой материнской породы, а rpore представляет эффективный радиус пор в материнской породе). Однако в пределах текущего диапазона работы прибора ЯМК В0 варьирует в пределах коэффициента, равного 2, и изменения внутреннего градиента поля также ограничены данным диапазоном. Более важно то, что усреднение по времени и по множеству хаотической ориентации Gint приводит к устранению члена  . Смещение фазы, таким образом, пропорционально сумме квадратов внутреннего и внешнего градиентов (Уравнение 5).
. Смещение фазы, таким образом, пропорционально сумме квадратов внутреннего и внешнего градиентов (Уравнение 5).

Таким образом, скорость затухания диффузии по уравнению (3), являющаяся функцией градиента, может быть описана отдельно в виде зависимости от внутреннего и внешнего градиента, соответственно:

Влияние внутреннего градиента в уравнении (2) можно вставить в остальные члены:

Член в скобках в уравнении (7) не зависит от внешнего градиента. Отклонение интенсивности внутреннего градиента линейно пропорционально отклонению частоты в виде
в то время как отклонение внешнего градиента превышает линейную пропорциональность f. Для большинства случаев, когда в среднем
a T-1 2 Diff, int не превышает значение члена в квадратных скобках, мы можем допустить, что величина в квадратных скобках уравнения (7) от частоты не зависит. Следовательно, если все данные, которые предполагается объединить, обладают одинаковым ТЕ, то член в скобках принимается примерно одинаковым для всех последовательностей из множества эхо-сигналов. Если же значения ТЕ в этих последовательностях из множества эхо-сигналов различны, то член в скобках приблизительно действителен только тогда, когда член затухания, обусловленного внутренним градиентом, намного меньше объединенных членов объемной и поверхностной релаксации либо намного меньше члена внешнего градиента. Такие приближенные условия действительны во многих случаях. В следующих абзацах под градиентом будет пониматься только внешний градиент.
Обычно, последовательность из множества эхо-сигналов, принимаемых на частоте fj в градиентном поле Gj, представляют с использованием мультиэкспонентного уравнения:

где i, j, k - индексы для i-го T2 компонента, k-й частоты и k-го эхо-сигнала, 20 соответственно. N_comp относится к числу компонентов Т2. Стандартная последовательность из множества эхо-сигналов, показанная в уравнении (9), обозначается как ES, а последовательность из множества эхо-сигналов капиллярно-связанной воды, которая короче стандартной последовательности множеств эхо-сигналов, показанная в уравнении (10), обозначается как ЕB.


ES и EB принимаются с использованием частот fS fB, соответственно. Число эхо-сигналов, NE, обеих последовательностей из множества эхо-сигналов может быть различным, причем NEB≤NES. Одно и то же значение ТЕ используется для обеих последовательностей из множества эхо-сигналов, и обе последовательности полностью поляризованы. Обычно, последовательности из множества эхо-сигналов для капиллярно-связанной воды не суммируются со стандартной последовательностью из множества эхо-сигналов. Однако поправка расхождения амплитуды эхо-сигналов на EB, обусловленного влиянием градиента, позволяет суммировать ES и ЕB. Если, однако, NEB<<NES, а NEB·ТЕB мало, то влияние максимального градиента несущественно, если
при этом поправку на градиент можно опустить.
В предпочтительном варианте осуществления предлагаемого в изобретении способа наиболее продолжительная последовательность из множества эхо-сигналов воспринимается на самой высокой частоте, так как более высокие частоты обеспечивают лучшее соотношение "сигнал-шум" (SNR). Следовательно, как правило, fS>fB. Однако изобретение не ограничивается выбором частоты приема по признаку получения наиболее продолжительной последовательности из множества эхо-сигналов.
Используя предлагаемые в изобретении способы, можно определить ряд петрофизических параметров. Например, если две последовательности из множества эхо-сигналов, А и В, различаются только временем ожидания (TW), то эти две последовательности из множества эхо-сигналов можно усреднить. Получится уравнение

где wA и wB - весовые множители для сигналов А и В, соответственно.
Поляризационные факторы для сигналов А и В обозначены как pA, i, и pB, i. При очень продолжительных значениях TW сигналы поляризованы полностью (р=1). Во всех других случаях 0<p<1. Это уравнение можно использовать для получения значения полностью поляризованной парциальной пористости, такой как CBW, или капиллярно-связанной воды. Остальной частью частично поляризованного сигнала можно пренебречь.
Если две последовательности из множества эхо-сигналов, А и В, различаются только частотами, а градиент магнитного поля прибора дает пренебрежимо малые различия между всеми значениями k в уравнении
для этих двух частот, тогда эти две последовательности из множества эхо-сигналов могут быть объединены с усреднением по весовому коэффициенту, а результирующая величина может использоваться для получения полного распределения пористости с применением уравнения

Если две последовательности из множества эхо-сигналов, А и В, различаются только G, тогда эти две последовательности из множества эхо-сигналов могут быть объединены с усреднением по весовому коэффициенту после выполнения поправки по градиенту, а результирующую величину можно использовать для получения полной пористости, эффективной пористости, CBW, объема капиллярно-связанной воды, а также BVM, с использованием формулы

где В' - последовательность из множества эхо-сигналов В с поправкой на градиент. Поправка на градиент заключается в вычислении поправочного коэффициента в соответствии с обоими значениями G, а также коэффициента диффузии воды при данных температуре и давлении. Зависимый от времени весовой множитель, как описано выше, применяется к индивидуальным эхо-сигналам обеих последовательностей из множества эхо-сигналов.
Если две последовательности из множества эхо-сигналов, А и В, различаются по G*TE или 1) из-за различия в ТЕ, или 2) из-за различий и в G, и в ТЕ, то можно применить поправку на влияние G*TE, после чего произвести интерполяцию с приведением частных значений ТЕ к одинаковой плотности, а затем, перед усреднением, использовать зависящие от времени весовые множители. Применяемые весовые коэффициенты зависят от ТЕ, стандартной девиации шумов и поправочного коэффициента G*TE и применяются, как описано выше. Последовательности из множества эхо-сигналов, которые усреднялись по весу и подвергались поправке по G*TE, используются только для получения параметров породы, но не для определения свойств флюида.
На фиг.6 изображена блок-схема предпочтительного варианта осуществления предлагаемого в изобретении способа. На шаге 601 производится сравнение между результатами суммирования стандартной последовательности из множества эхо-сигналов SES (fs) и последовательности из множества эхо-сигналов BVI - SEB(fB). SEs(fs) имеет соответственную продолжительность эхо-сигналов NES, а SEB(fB) имеет соответственную продолжительность эхо-сигналов NEB. Сравнение производится путем взятия минимального числа эхо-сигналов (min{NEB, NES}) и суммирования каждой последовательности из множества эхо-сигналов от 1 до min{NEB, NES}. Это суммирование выполняется для достаточно большого числа усредненных по вертикали данных по эхо-сигналам с целью устранения влияния случайных шумов. Если SEB(fB)-SES(fS)≤0 постоянно, то введение поправки на шум не требуется. В противном случае, может быть использован предлагаемый в изобретении способ.
На шаге 602 производится умножение одиночных эхо-сигналов последовательности из множества эхо-сигналов ЕB на коэффициент

где k - индекс эхо-сигнала. Значения Dwater и градиента можно получить, зная соответствующие температуру коллектора и частоты активации. Результат этого умножения приближается к предсказанным значениям ЕB, в переводе на fS.

На шаге 603 сравниваются SEB(fB) и SES(fS). Сравнение производится путем взятия минимального числа эхо-сигналов (min{NEB, NES}) и суммирования каждой последовательности из множества эхо-сигналов от 1 до min{NEB, NES}. Это суммирование выполняется для достаточно большого числа усредненных по вертикали данных по эхо-сигналам с целью устранить влияние случайных шумов. Если различие превышает заданный допустимый уровень (tolerance), переходят к шагу 604.
На шаге 604 сравнивают значения эффективной пористости (МРНЕ), полученные по величине T2, производной от EB (fS,k, TE) и ES (fS, k, TE). Это сравнение применяется к достаточно большому числу усредненных по вертикали данных с целью устранить влияние случайных шумов. Если  a SEB(fS)>SES(fS), это указывает на недостаточность коррекции. В случае недостаточной коррекции, как видно из уравнения для β, увеличивают G2 S-G2 B на коэффициент слегка больше 1, после чего пересчитывают. Если
a SEB(fS)>SES(fS), это указывает на недостаточность коррекции. В случае недостаточной коррекции, как видно из уравнения для β, увеличивают G2 S-G2 B на коэффициент слегка больше 1, после чего пересчитывают. Если  a SEB(fS)<SES(fS), это свидетельствует об избыточной коррекции. В случае избыточной коррекции градиент G2 S-GB 2 уменьшают на коэффициент слегка меньше 1 и пересчитывают.
a SEB(fS)<SES(fS), это свидетельствует об избыточной коррекции. В случае избыточной коррекции градиент G2 S-GB 2 уменьшают на коэффициент слегка меньше 1 и пересчитывают.
Методика, приведенная на графической схеме фиг.6, применима к тем последовательностям из множества эхо-сигналов, которые были получены с одинаковым ТЕ, но на разных частотах (и с различным градиентом). В другом варианте, когда ТЕ отличается по последовательностям из множества эхо-сигналов, а частота одинакова или также различна, применяется альтернативный способ, использующий незначительную модификацию при суммировании эхо-сигналов, которая заключается в замене SE на SE/TE.
На фиг.7А-Г показаны примеры затухания эхо-сигналов из-за диффузии в градиентном поле. Модельные данные соответствуют лабораторной компоновке магнита в приборе и градиенту при работе в диапазоне частот от 425 до 800 кГц. Частоты приближенно определены в виде 12 дискретных частотных значений, при этом самая низкая частота обозначена №1, а самая высокая - №12. Использование модельных данных подразумевается только в качестве примера, оно не обязательно ограничивается вышеупомянутым диапазоном частот и не подразумевает ограничение им изобретения. Как правило, при ТЕ=0,6 мс и менее, на всех частотах влияние градиента в течение первых 30 мс на данные эхо-сигнала незначительно. На фиг.7А-Г показано влияние градиента на компонент Т2 в 100 мс. T2 со значением 100 мс может использоваться в целях иллюстрации, так как оно представляет собой геометрическое среднее двух компонентов с одинаковым весовым коэффициентом, в 10 мс и 1000 мс, соответственно. Влияние параметров D, G и ТЕ на коэффициент затухания можно видеть на фиг.7А и 7В. На фиг.7а ТЕ=0,6 мс, а значения G установлены на 14, 20 и 26 гаусс/см (кривые 701, 703 и 705, соответственно). Коэффициент затухания измеряется вдоль ординаты, а время (в мс) измеряется по абсциссе. На фиг.7В ТЕ=0,4 мс, а значения G установлены на 14, 20 и 26 гаусс/см (кривые 702, 704 и 706, соответственно). Коэффициент затухания измеряется вдоль ординаты, а время (в мс) измеряется по абсциссе. Эффекты, показанные на фиг.7А, можно видеть по затуханию амплитуды эхо-сигнала на фиг.7В, а эффекты, показанные на фиг.7В, можно видеть по затуханию амплитуды эхо-сигнала на фиг.7Г. На фиг.7Б показано отклонение менее чем в 2,5% за 30 мс данных затухания эхо-сигнала для приложенных градиентов в 14 гаусс/см (711), 20 гаусс/см (713) и 14 гаусс/см (715) при ТЕ=0,6 мс. Коэффициент затухания измеряется вдоль ординаты, а время (в мс) измеряется вдоль абсциссы. Как видно из фиг.7Г (имеющей те же оси, что и фиг.7Б), это отклонение уменьшается до 2% при ТЕ=0,4 мс, где кривые, представляющие G=26, 30 и 14 гаусс/см, практически тождественны (716). Разность по градиенту, как показано, больше, чем разность по частотам, обозначенным №3 и №10. В других случаях (например, в случае FE3, обсуждаемом в патентной заявке US 10/288115 от 05.11.2002 (Chen и Edwards), содержание которой полностью включено в настоящее описание в качестве ссылки и которая подана тем же заявителем, что и настоящее изобретение) это влияние может быть даже меньше представленного на фиг.7Б и 7Г.
Если частота № 9 используется для получения наиболее продолжительной последовательности из множества эхо-сигналов, а частоты № 6 и № 12 используются для полностью поляризованных последовательностей из множества эхо-сигналов капиллярно-связанной воды, то суммированные результаты показывают средний эффект затухания, который приблизительно равен
Следовательно, разность скорости затухания эхо-сигналов между данными, усредненными по трем частотам, и по средней частоте (№9) дается выражением
Δ=(nTE)ТЕ2γ2(2G9 2-G2 6-G2 12)D/36,
если использовать следующую аппроксимацию:
G12-G9≈G9-G6=dG, то
Поскольку G9 составляет ~26 гаусс/см и если dG равно ~6 гаусс/см, то этот эффект оказывает незначительное влияние на последовательность из множества эхо-сигналов типа CBW со значением NE·TE=10 мс, малое влияние на частное значение T2cutoff в 33 мс, но приводит к значительным различиям для стандартной последовательности из множества эхо-сигналов со значением NE·TE=500 мс.
На фиг.8 показано расхождение между значениями T2cutoff, полученными в лабораторных условиях без приложения градиента (801), и наблюдаемыми значениями T2cutoff, найденными в градиентной среде нахождения прибора со значениями градиента, показанными на фиг.5Б. Все данные на фиг.8 предполагают температуру среды в 200°F. Отрезки горизонтальных линий 810 и 820, отсекаемые линиями T2cuioff 801, 803, 805 и 807, представляют эквивалентные значения T2cutoff, которые следует применять при интерпретации каротажных данных, если используются стандартные значения T2cutoff песчаника или известняка, полученные по лабораторным данным. Отрезки вертикальных линий, отсекаемые кривыми T2cutoff, представляют эквивалентные лабораторным значения T2cutoff, если для интерпретации данных каротажа при отсечении используются значения в 33 мс (825) или 90 мс (815).
Пример на фиг.8 основан на приборном градиенте до 26 гаусс/см. Если прибор работает при более высоком градиенте поля, то эквивалентное T2cutoff может быть ниже 33 мс для больших значений G·TE. В таких случаях необходимо вводить поправку.
В другом варианте настоящего изобретения две последовательности из множества эхо-сигналов принимаются на двух различных частотах (следовательно, при двух различных градиентах G) и двух различных ТЕ. Обе эти последовательности могут быть объединены с вычислением сначала модифицированного уравнения (11) с введением в него различий по ТЕ

для k-го эхо-сигнала в последовательности из множества эхо-сигналов КПМГ в момент времени t=k·ТЕS. И вновь, обе эти последовательности из множества эхо-сигналов могут иметь либо одинаковую, либо различную продолжительность, NE·ТЕ. Для введения поправки, сомножитель либо из уравнения (11), либо из уравнения (13), в зависимости от применимости каждого из них, применяется к измеренному эхо-сигналу, M(t), включающему как сам сигнал, S(t), так и шум, N(t), так как индивидуальный эхо-сигнал загрязнен хаотическим шумом:

Второй член (шумовая составляющая) показывает, что шум может также усиливаться (или ослабляться) на ту же величину, что и сигнал. Для выполнения усреднения этих данных с остальными, к последовательности из множества эхо-сигналов M(t) применяется зависимый от времени весовой множитель β-2(t) или ζ-2(t) с получением следующего выражения

причем аналогичные действия производятся с поправочным коэффициентом β. Так, для эхо-сигналов с очень большим значением t, возникающих в конце продолжительной последовательности из множества эхо-сигналов, весовой множитель очень мал. Это соответствует сигналам, интенсивность которых сопоставима с уровнем шума.
Настоящее изобретение дополнительно дает возможность проведения анализа в тех случаях, когда стандартная девиация шумов отличается от девиации оригинальных последовательностей из множества эхо-сигналов. При этом весовые коэффициенты должны быть дополнительно модифицированы путем умножения на β или ζ, при стандартной девиации шума для l-й последовательности из множества эхо-сигналов, равной σl. Кроме того, разность в скорости отбора данных вследствие различий ТЕ в оригинальных последовательностях из множества эхо-сигналов можно ввести в качестве дополнительного коэффициента в уравнении

Таким образом, с учетом всех этих коэффициентов весовой множитель представляет собой

На фиг.9 показана блок-схема предлагаемого в изобретении способа для применения при варьировании нескольких параметров, таких как градиент, расстояние между эхо-сигналами, а также стандартная девиация. На шаге 901 собирают данные ЯМР, а на шаге 903 выполняют расчет коэффициента диффузии воды. Коэффициент диффузии определяется как функция температуры и давления на заданной глубине. На шаге 905 рассчитывают значение градиента в зависимости от частоты. На основе данных из шагов 901, 903 и 905, на шаге 911 производится поправка на влияние градиента на последовательности из множества эхо-сигналов. Индивидуальные стандартные отклонения шума в последовательностях из множества эхо-сигналов могут быть рассчитаны на шаге 913. На шаге 915 рассчитываются весовые коэффициенты, как описано уравнением (12), в соответствии с вовлеченными параметрами (G, ТЕ и стандартная девиация шума). На шаге 921 принимают весовые коэффициенты с шага 915 и объединяют последовательности из множества эхо-сигналов во временном интервале. Результаты, полученные на шаге 921, дают возможность оператору рассчитать на шаге 923 петрофизические параметры.
Настоящее изобретение было описано со ссылкой на подвесное многочастотное каротажное устройство. Предлагаемый в изобретении способ, однако, может использоваться и с устройством для каротажа в процессе бурения, составляющем часть забойного узла, подаваемого в скважину на буровой трубе. Он может также непосредственно применяться с одночастотными устройствами.
Осуществление изобретения было рассмотрено выше на примере его конкретного варианта, однако специалисту должны быть очевидны возможности осуществления изобретения и в других, видоизмененных, вариантах. Предполагается, что любые такие изменения подпадают под патентные притязания, изложенные в прилагаемой формуле изобретения.
Изобретение относится к способу получения параметров горных пород с помощью прибора ядерного магнитного каротажа. При магнитно-ядерных измерениях спинового эха с одним или несколькими различиями, касающимися (i) временных интервалов между эхо-сигналами, (ii) градиентов статического поля, (iii) времени поляризации, или (iv) уровней шума, обусловленных коэффициентом диффузии флюида, комбинирование результатов измерений спинового эха представляет собой непростую задачу. Однако, с применением поправочного коэффициента такое комбинирование возможно, и оно обеспечивает улучшенную интерпретацию свойств породы. Изобретение способствует повышению эффективности проведения каротажных исследований и оценки пластов породы по объединенным сигналам, получаемым из последовательностей множества эхо-сигналов в различных диапазонах градиента магнитного поля. 2 н. и 30 з.п. ф-лы, 15 ил.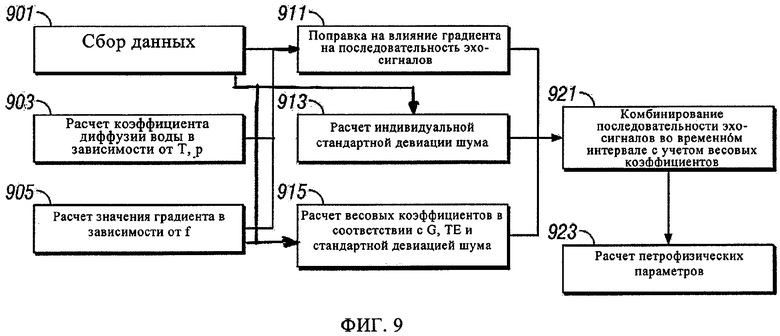
1. Способ каротажа толщи горных пород с помощью прибора ядерно-магнитного каротажа (ЯМК), введенного в проходящую через толщу пород скважину, заключающийся в том, что
а) посредством использования первой последовательности радиоимпульсов получают из первой интересующей зоны первую последовательность из множества эхо-сигналов,
б) посредством использования второй последовательности радиоимпульсов получают из второй интересующей зоны вторую последовательность из множества эхо-сигналов,
в) определяют по меньшей мере один поправочный коэффициент, зависящий по меньшей мере частично от коэффициента диффузии флюида в породе, и
г) объединяют первую и вторую последовательности из множества эхо-сигналов с использованием указанного по меньшей мере одного поправочного коэффициента и получением объединенной последовательности из множества эхо-сигналов, при этом вторая последовательность радиоимпульсов имеет по меньшей мере один параметр, отличный от параметра первой последовательности радиоимпульсов.
2. Способ по п.1, в котором прибор ЯМК представляет собой многочастотный каротажный прибор, а статическое магнитное поле в первой зоне отлично от статического магнитного поля во второй зоне.
3. Способ по п.1, в котором используют прибор ЯМК со средством смещения поля, предназначенным для смещения статического магнитного поля в породе.
4. Способ по п.1, в котором указанный по меньшей мере один параметр является по меньшей мере одним из следующего: частота, промежуток между перефокусирующими импульсами, время поляризации, и число импульсов.
5. Способ по п.1, в котором указанный по меньшей мере один поправочный коэффициент представляет собой мультипликативный множитель, устанавливающий соотношение между первой и второй последовательностями из множества эхо-сигналов.
6. Способ по п.1, в котором указанный по меньшей мере один поправочный коэффициент дополнительно зависит от по меньшей мере одного из следующего:
(i) градиент статического магнитного поля, относящийся к первой последовательности радиоимпульсов, (ii) градиент статического магнитного поля, относящийся ко второй последовательности радиоимпульсов, (iii) временной интервал между эхо-сигналами, относящийся к первой последовательности радиоимпульсов, (iv) временной интервал между эхо-сигналами, относящийся ко второй последовательности радиоимпульсов, (v) уровень шума для первой последовательности из множества эхо-сигналов и (vi) уровень шума для второй последовательности из множества эхо-сигналов.
7. Способ по п.1, в котором определяют коэффициент диффузии флюида на основе измеренного коэффициента диффузии и вводят поправку на температуру флюида и/или глубину нахождения флюида.
8. Способ по п.1, в котором первая и вторая последовательности радиоимпульсов имеют по существу одинаковую частоту и по существу одинаковый временной интервал между эхо-сигналами, а указанный по меньшей мере один поправочный коэффициент выражается зависимостью вида
где k - индекс эхо-сигнала, ТЕ - временной интервал между эхо-сигналами, γ - гиромагнитное отношение, GS - градиент статического магнитного поля, соответствующий первой последовательности из множества эхо-сигналов, GB - градиент статического магнитного поля, соответствующий второй последовательности из множества эхо-сигналов, a D - коэффициент диффузии флюида.
9. Способ по п.1, в котором указанный по меньшей мере один параметр включает различные частоты и различные величины ТЕ, а указанный по меньшей мере один поправочный коэффициент выражается зависимостью вида

k - индекс эхо-сигнала, TES - временной интервал между эхо-сигналами, соответствующий первой последовательности импульсов, ТЕВ - временной интервал между эхо-сигналами, соответствующий второй последовательности импульсов, γ - гиромагнитное отношение, GS - градиент статического магнитного поля, соответствующий первой последовательности импульсов, GB градиент статического магнитного поля, соответствующий второй последовательности импульсов, a Dwater - коэффициент диффузии воды.
10. Способ по п.1, в котором первая и вторая последовательности из множества эхо-сигналов различаются по уровням шума, а указанный по меньшей мере один поправочный коэффициент зависит от одного из уровней шума.
11. Способ по п.1, в котором первая и вторая последовательности из множества эхо-сигналов различаются по временным интервалам между эхо-сигналами, а указанный по меньшей мере один поправочный коэффициент зависит от одного из этих временных интервалов.
12. Способ по п.1, в котором указанный по меньшей мере один параметр включает только время ожидания, причем на основе объединенных последовательностей из множества эхо-сигналов дополнительно осуществляют определение объема глинисто-связанной воды и капиллярно-связанной воды.
13. Способ по п.1, в котором указанный по меньшей мере один параметр включает только частоту, причем на основе объединенных последовательностей из множества эхо-сигналов дополнительно осуществляют определение полного распределения пористости.
14. Способ по п.1, в котором первая и вторая интересующие зоны различаются по градиенту связанного с ними статического магнитного поля, причем на основе объединенных последовательностей из множества эхо-сигналов дополнительно осуществляют определение по меньшей мере одного из следующего: (i) эффективная пористость, (ii) глинисто-связанная вода и (iii) объем капиллярно-связанной воды.
15. Способ по п.8, в котором дополнительно
(i) сравнивают общие пористости, полученные из первой и второй последовательностей из множества эхо-сигналов,
(ii) сравнивают суммы эхо-сигналов первой и второй последовательностей из множества эхо-сигналов и
(iii) осуществляют коррекцию поправочного коэффициента на основе указанных сравнений.
16. Способ по п.1, в котором произведения градиента на временной интервал между эхо-сигналами для первой и второй интересующих зон различны, и при этом дополнительно осуществляют
(i) использование интерполяции для приведения частных значений к одинаковой плотности и
(ii) применение зависящей от времени весовой функции.
17. Устройство для использования в толще горных пород, содержащее
а) магнит, размещенный на каротажном приборе, вводимом в проходящую через толщу пород скважину, и создающий статическое магнитное поле в первой и второй интересующих зонах в породе,
б) антенну, размещенную на каротажном приборе и производящую первую и вторую последовательности радиоимпульсов в первой и второй зонах,
в) антенну, размещенную на каротажном приборе и воспринимающую из первой и второй зон первую и вторую последовательности из множества эхо-сигналов,
г) процессор, который
(i) определяет по меньшей мере один поправочный коэффициент, зависящий по меньшей мере частично от коэффициента диффузии флюида в породе, и
(ii) объединяет первую и вторую последовательности из множества эхо-сигналов с использованием указанного по меньшей мере одного поправочного коэффициента с получением объединенной последовательности из множества эхо-сигналов, причем вторая последовательность импульсов имеет по меньшей мере один параметр, отличный от параметра первой последовательности импульсов.
18. Устройство по п.17, в котором магнит создает статическое магнитное поле в различающихся первой и второй интересующих зонах.
19. Устройство по п.17, в котором каротажный прибор представляет собой многочастотный каротажный прибор, а статические магнитные поля в первой и второй зонах различны.
20. Устройство по п.17, в котором каротажный прибор содержит средство смещения статического магнитного поля в горной породе.
21. Устройство по п.17, в котором указанный по меньшей мере один параметр является по меньшей мере одним из следующего: (I) интервал между перефокусирующими импульсами, (II) время поляризации, и (III) число импульсов.
22. Устройство по п.17, в котором поправочный коэффициент представляет собой мультипликативный множитель, устанавливающий соотношение между первой и второй последовательностями из множества эхо-сигналов.
23. Устройство по п.17, в котором указанный по меньшей мере один поправочный коэффициент дополнительно зависит от по меньшей мере одного из следующего: (I) градиент статического магнитного поля, относящийся к первой последовательности радиоимпульсов, (II) градиент статического магнитного поля, относящийся ко второй последовательности радиоимпульсов, (III) временной интервал между эхо-сигналами, относящийся к первой последовательности радиоимпульсов, (IV) временной интервал между эхо-сигналами, относящийся ко второй последовательности радиоимпульсов, (V) уровень шума для первой последовательности из множества эхо-сигналов, и (VI) уровень шума для второй последовательности из множества эхо-сигналов.
24. Устройство по п.17, в котором процессор дополнительно осуществляет определение коэффициента диффузии флюида на основе измеренного коэффициента диффузии и введение поправки на температуру флюида и/или глубину нахождения флюида.
25. Устройство по п.17, в котором первая и вторая последовательности радиоимпульсов имеют по существу одинаковую частоту и по существу одинаковый временной интервал между эхо-сигналами, а указанный по меньшей мере один поправочный коэффициент выражается зависимостью вида
где k - индекс эхо-сигнала, ТЕ - временной интервал между эхо-сигналами, γ - гиромагнитное отношение, GS - градиент статического магнитного поля, соответствующий первой последовательности радиочастотных эхо-сигналов, GB - градиент статического магнитного поля, соответствующий второй последовательности радиочастотных эхо-сигналов, a D - коэффициент диффузии флюида.
26. Устройство по п.17, в котором указанный по меньшей мере один параметр включает различные частоты и различные величины ТЕ, и указанный по меньшей мере один поправочный коэффициент выражается зависимостью вида

где k - индекс эхо-сигнала, TES - временной интервал между эхо-сигналами, соответствующий первой последовательности радиоимпульсов, ТЕВ - временной интервал между эхо-сигналами, соответствующий второй последовательности радиоимпульсов, γ - гиромагнитное отношение, GS - градиент статического магнитного поля, соответствующий первой последовательности импульсов, GB - градиент статического магнитного поля, соответствующий второй последовательности импульсов, a Dwater коэффициент диффузии воды.
27. Устройство по п.17, в котором имеется различие между уровнями шума первой и второй последовательностей из множества эхо-сигналов, а указанный по меньшей мере один поправочный коэффициент зависит от одного из уровней шума.
28. Устройство по п.17, в котором указанный по меньшей мере один параметр включает только время ожидания, а процессор дополнительно определяет на основе объединенной последовательности эхо-сигналов объем глинисто-связанной воды и капиллярно-связанной воды.
29. Устройство по п.17, в котором указанный по меньшей мере один параметр включает только частоту, а процессор дополнительно определяет на основе объединенной последовательности эхо-сигналов полное распределение пористости.
30. Устройство по п.17, в котором магнит создает статическое магнитное поле в первой и второй интересующих зонах, различных по градиенту связанного с ними статического магнитного поля, а процессор дополнительно определяет на основе объединенных последовательностей из множества эхо-сигналов по меньшей мере одно из следующего: (i) эффективная пористость, (ii) глинисто-связанная вода, и (iii) объем капиллярно-связанной воды.
31. Устройство по п.24, в котором процессор дополнительно
(i) сравнивает общую пористость, полученную из первой и второй последовательностей из множества эхо-сигналов,
(ii) сравнивает суммы эхо-сигналов первой и второй последовательностей из множества эхо-сигналов и
(iii) производит коррекцию поправочного коэффициента на основе указанных сравнений.
32. Устройство по п.17, в котором произведение градиента на временной интервал между эхо-сигналами для первой интересующей зоны отлично от произведения градиента на временной интервал между эхо-сигналами для второй интересующей зоны, и в котором процессор дополнительно
(i) осуществляет интерполяцию для приведения частных значений к одинаковой плотности и
(ii) применяет зависящую от времени весовую функцию.
| US 6366087 A1, 02.04.2002 | |||
| US 2002167314 A1, 14.11.2002 | |||
| US 6377042 B1, 23.04.2002 | |||
| US 6316940 B1, 13.11.2001 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛНОЙ ПОРИСТОСТИ МЕТОДОМ ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА | 1998 |
|
RU2187132C2 |

