Эта заявка испрашивает приоритет и преимущество по предварительной заявке США № 60/820,417, поданной 26 июля 2006.
Современные каротажные приборы на основе ядерного магнитного резонанса (ЯМР), например МR SCANNERTM от компании Schlumberger, выполняют многочисленные измерения, в которых некоторые параметры съемки варьируются. Параметры варьируются для получения изменений в отклике ЯМР, который анализируется и интерпретируется в зависимости от свойств - жидкости и/или породы. Обычно времена ожидания (ВО) и интервал эхо-сигнала (ИЭ) изменяются. Для всех измерений измеряется пакет эхо-сигнала, который и составляет исходный сигнал ЯМР. Анализ затухания пакета эхо-сигнала предоставляет распределение поперечного времени релаксации, T2. Слежение за изменениями амплитуды пакета эхо-сигнала при различных ВО позволяет определить продольное время релаксации, T1. Аналогично, изменения в коэффициентах затухания и амплитудах пакета эхо-сигнала с различными ИЭ позволяют измерить коэффициенты молекулярной диффузии D.
Проведение достаточного числа измерений при соответствующем выборе параметров съемки позволяет выполнить одновременное обратное преобразование всех данных для получения трехмерного распределения в пространстве T2-T1-D. Этот способ в настоящее время используется в МR SCANNERTM и CMRTM при измерении и интерпретации характеристик жидкости. Преимущества использования одновременного обратного преобразования, а не раздельной оценки T2, T1, и распределений D заключаются в (i) повышении точности и (ii) снижении числа измерений, а следовательно, и полного времени, требующегося для извлечения полных распределений.
Дополнительно к изменениям ВО и ИЭ некоторые каротажные приборы ЯМР собирают данные на различных частотах. Изменение частоты означает изменение глубины исследования (ГИ) в измерениях ЯМР. Например, прибор MR SCANNERTM имеет объемы исследования, которые формируют тонкие дуги (~1-3 мм) перед антенной. Расстояние до дуги от передней части антенны зависит от частоты. Более низкая частота соответствует дуге, более удаленной от антенны. Поскольку прибор расположен эксцентрично, с антенной, зажатой у стенки буровой скважины, то более низкая частота означает большую глубину исследования.
Для оценки данных, полученных на различных частотах (то есть для различных ГИ), приняты два противоположных подхода. Первый подход содержит объединение данных со всех ГИ и выполнение единственного обратного преобразования. Этот подход используется для улучшения точности при единственном наборе ответов и призван предоставить распределение жидкости, не изменяемое в доступных в течение измерений пределах ГИ. Объединение или усреднение данных, полученных на различных частотах, могло бы привести к противоречивому набору данных и ошибочной интерпретации в случае изменения распределения жидкости с изменением ГИ. Полученные с помощью МR SCANNERTM результаты показали, что распределения жидкости могут существенно изменяться в пределах первых нескольких дюймов от ствола скважины к формации. Изменения в жидкости происходят из-за попадания фильтрата бурового раствора в формацию. Проникающая буровая жидкость (фильтрат) смещает подвижные природные жидкости, как воду, так и углеводород. В связи с этими наблюдениями для МR SCANNERTM принят второй подход. Выполняется достаточное количество измерений для допущения независимого обратного преобразования и интерпретации для каждого ГИ (то есть на каждой частоте). Этот способ вполне общий и корректно работает для различных распределений жидкости. Вместе с тем, он не оптимален в отношении точности измерения. Это особенно важно для больших ГИ (более низкая частота), когда оказывается малым отношение сигнал/шум.
Предлагалось несколько способов выполнения обратного преобразования затухающего пакета эхо-сигнала ЯМР в распределения. Однако эти способы предполагают обработку каждого эксперимента в наборе, индивидуально или независимо.
Сущность изобретения
Настоящее изобретение включает в себя способ инвертирования двух или нескольких различных наборов данных, в которых решения, соответствующие различным наборам данных, частично отличаются и частично идентичны. Способ анализирует данные-измерения общих и различающихся свойств и рассчитывает общее распределение для общих свойств и различающиеся распределения для различающихся свойств. Предпочтительный вариант реализации этого изобретения представляет собой способ объединения измерений ЯМР при различающихся ГИ для улучшения точности для одной ГИ при независимости, в значительной степени, распределений жидкости от различающихся ГИ. При этом способ включает частично ограниченное 4-мерное обратное преобразование для ЯМР приложений.
В одном варианте реализации наборы данных являются последовательностью пакетов эхо-сигнала ЯМР, полученной при различных ГИ. Решениями являются T2, T1, T1/T2 и распределения D (или многомерные распределения), сечения которых идентичны для всех ГИ (например, сечения объема связанной жидкости ("BFV")), тогда как остальные сечения (объемы свободных жидкостей, "FFV") распределений могут изменяться с изменением ГИ. В другом варианте реализации измерения сопротивления при различных расстояниях излучатель-приемник могут быть проанализированы для определения таких свойств, как сопротивление связанной жидкости, сопротивление свободной жидкости и соответствующие насыщения. То, какое именно данное конкретное свойство - общее или различающееся, зависит от обстоятельств измерения. Для некоторых типов измерения свойство может быть общим, а для других типов измерения то же самое свойство может быть различающимся. Общие свойства рассматриваются как равные или иным образом связанные среди важных наборов данных, тогда как различающиеся свойства считаются несвязанными, свободно связанными или их связь неизвестна в этих наборах данных.
Изобретение допускает получение высокоточных данных в одном наборе измерений (например, в поверхностной ГИ), для инвертирования одновременно с низкоточными данными (например, из большей ГИ) так, что получающиеся многочисленные решения (то есть T1, T2, распределения D из различающихся ГИ) следуют из высокоточных данных при сохранении некоторой степени независимости.
Краткое описание чертежей
Фиг.1A-1D изображают карты, показывающие скорости молекулярной диффузии в зависимости от продольного времени релаксации для сланцевой воды и газоносных песков для двух различающихся глубин исследования.
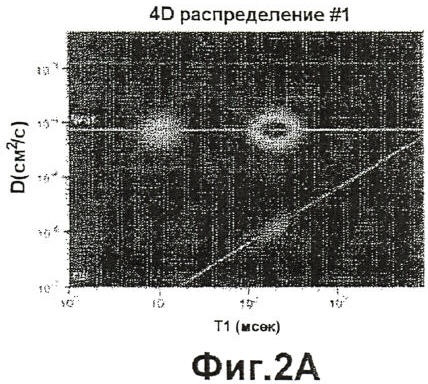
Фиг.2A - карта, показывающая коэффициенты молекулярной диффузии в зависимости от продольного времени релаксации для глубины исследования #1 в соответствии с настоящим изобретением.
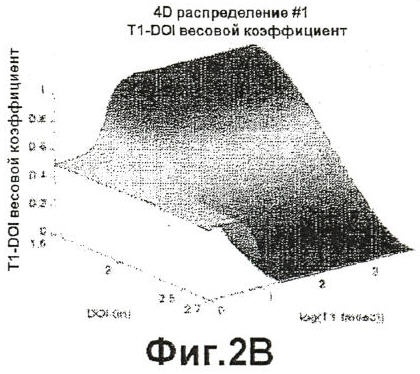
Фиг.2B - график, показывающий весовые коэффициенты, использованные для глубины исследования #1.
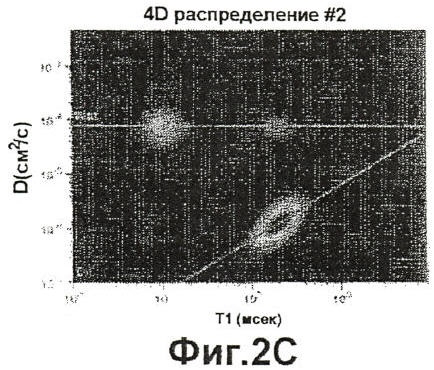
Фиг.2C - карта, показывающая коэффициенты молекулярной диффузии в зависимости от продольного времени релаксации для глубины исследования #2 в соответствии с настоящим изобретением.
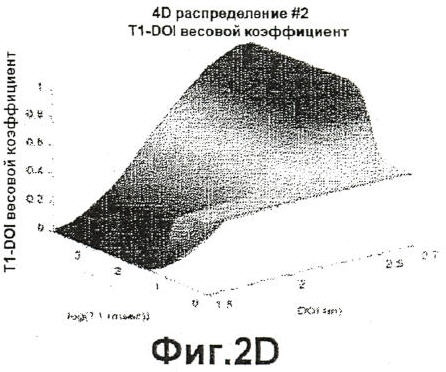
Фиг.2D - график, показывающий весовые коэффициенты, использованные для глубины исследования #2.
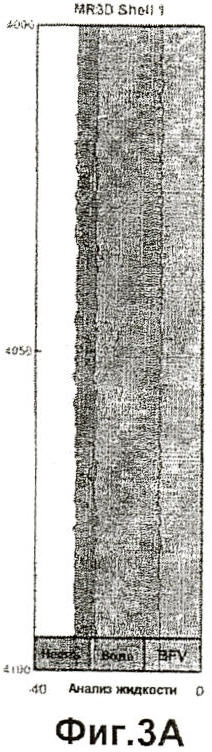
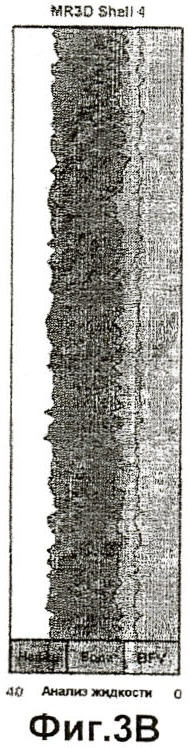
Фиг.3А и 3B - графики, показывающие результаты анализа жидкости с использованием стандартной методики обратного преобразования для глубин исследования # 1 и #2 соответственно.
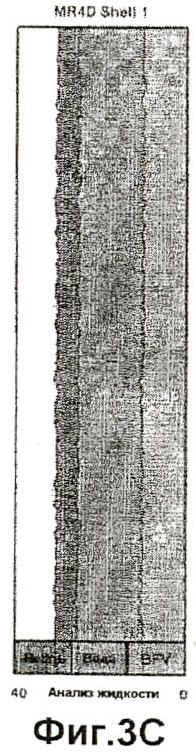
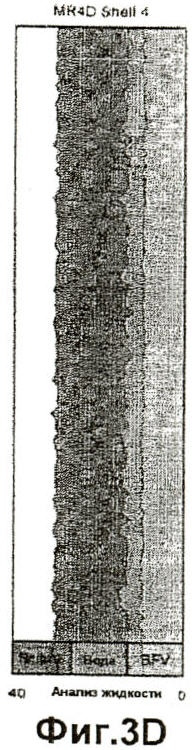
Фиг.3C и 3D - графики, показывающие результаты анализа жидкости с использованием методики обратного преобразования настоящего изобретения для глубин исследования #1 и #2 соответственно.
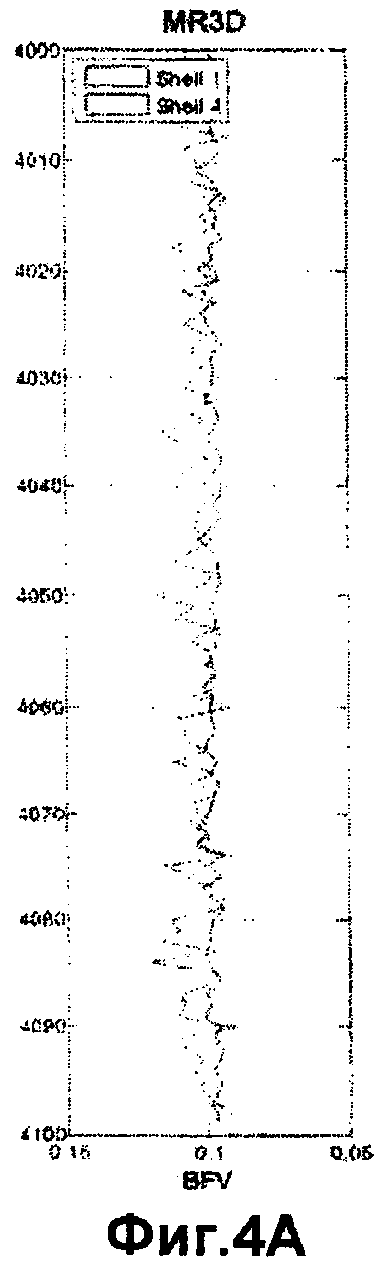
Фиг.4A - график, показывающий объем связанной жидкости, полученный с использованием стандартной методики обратного преобразования для глубин исследования #1 и #2.
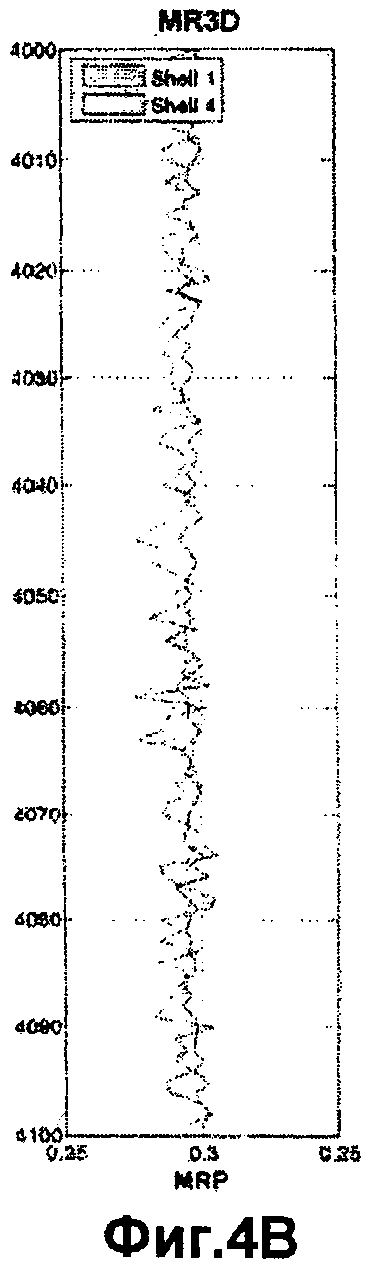
Фиг.4B - график, показывающий магниторезонансную пористость, полученный с использованием стандартной методики обратного преобразования для глубин исследования # 1 и #2.
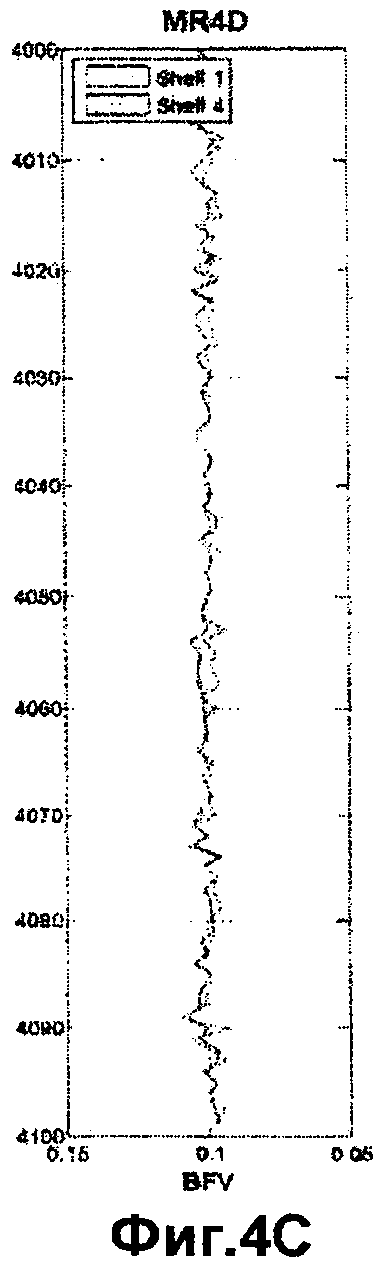
Фиг.4C - график, показывающий объем связанной жидкости, полученный с использованием методики обратного преобразования настоящего изобретения для глубин исследования # 1 и #2.
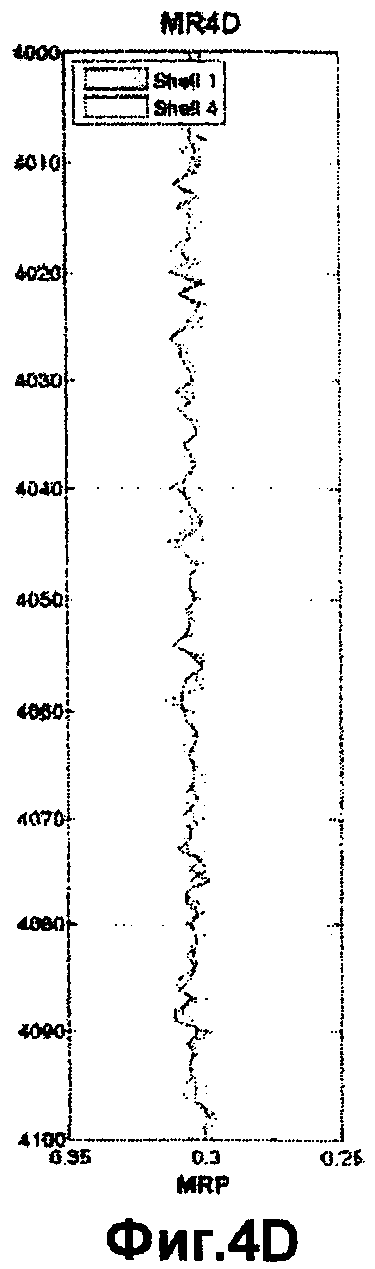
Фиг.4D - график, показывающий магниторезонансную пористость, полученный с использованием методики обратного преобразования настоящего изобретения для глубин исследования #1 и #2.
Подробное описание изобретения
В настоящее время все более и более сложные каротажные приборы на основе ЯМР с многочисленными датчиками и более сложными последовательностями съема данных требуют новых и более тонких алгоритмов обратного преобразования. Проблема объединения различных измерений для получения большего количества ответов, или увеличения надежности, нуждается в особом внимании.
Наиболее простой ЯМР-способ съема данных в стволе скважины представляет собой измерение единственного пакета эхо-сигнала с использованием последовательности CPMG (обычно формируя пару с измененной фазой в ответ на "звон"). Данные инвертируются в амплитудное распределение относительно поперечного времени релаксации T2. Эта задача может быть записана как: echo=Kernel·solution, где "echo" представляет измеренный эхо-сигнал, "solution" - амплитудное распределение и "Kernel" является ядром матрицы измерения. Ядро содержит отклики отдельных компонентов в амплитудном распределении, приведенные к единице. Уравнение описывает измерение как наложение приведенных отдельных компонентных откликов.
Если два измерения, echo1 и echo2, того же самого образца получены (с использованием двух различающихся датчиков, или съем последовательностей данных описывается как Kernel1 и Kernel2 соответственно), общее решение может быть найдено как решение уравнения:  , что представляет собой простое решение обеих задач обратного преобразования.
, что представляет собой простое решение обеих задач обратного преобразования.
Вместе с тем, этот способ сталкивается с трудностями, когда два различных ядра не могут полностью описать различие между двумя разными измерениями. Например, другие параметры, не являющиеся частью решения, также могут повлиять на измерение. Одна из обычно встречающихся проблем (и соответственно хорошо изученная) - обычное обратное преобразование полностью поляризованного измерения CPMG (после долгого ожидания) вместе со множеством измерений короткого времени ожидания (выбросы), которые могут повторяться чаще для лучшего отношения сигнал/шум. В этом случае ядро для выбросов (второе измерение) зависит также от времени поляризации и продольного времени релаксации (T1). Было предложено несколько решений этой проблемы.
Правильное решение заключается в расширении модели и включении всех параметров, от которых ядра зависят. В этом случае решение должно включать в себя продольное время релаксации T1, а также поперечное время релаксации T2. Это приводит к двумерному распределению. На практике использовалась замена второго измерения T1 на отношение T1/T2.
Расширение той же самой методики далее до экспериментов с отличающимся интервалом эхо-сигнала приводит к трехмерному обратному преобразованию. В этом случае ядро зависит также от диффузии жидкости (через интервал эхо-сигнала или протяженный интервал эхо-сигнала для первых двух эхо-сигналов при выявляемой последовательной диффузии). Решение является теперь трехмерным распределением с T2, T1/T2 и диффузией в качестве переменных. Следует отметить, что эта методика была введена не для согласования различных измерений для общего обратного преобразования различных съемов данных, а для получения информации о дополнительном параметре, диффузии. Методика могла бы и далее развиваться для включения ограничений (степени ограничения) при измерениях зависящей от времени диффузии.
Развитие решения для включения более независимых параметров позволяет получить из него больше информации при множестве различных съемов данных. Вместе с тем, такое развитие необязательно улучшает численную устойчивость решения или надежность в случаях с малым отношением сигнал/шум. Как отмечено ранее, объединение многочисленных измерений при обратном преобразовании улучшает устойчивость, если все измерения чувствительны к одним и тем же параметрам (то есть их ядра зависят от тех же параметров). Если измерения зависят также от других параметров, то решение должно быть расширено для разрешения конфликтов. Настоящее изобретение объединяет два или несколько съемов данных и только частично расширяет решение.
Нефтяная скважина обычно бурится с буровой жидкостью (буровой раствор). Буровой раствор предоставляет смазку, выводит шлам буровой породы на поверхность и выполняет другие функции. Вес бурового раствора обычно выбирается так, чтобы гидростатическое давление в стволе скважины превышало давление формации, благодаря чему жидкости формации удерживаются при бурении. Это избыточное давление приводит к прониканию фильтрата бурового раствора в формацию вблизи от буровой скважины и перемещению некоторой жидкости формации.
Ранее отмечалось, что информация о проникновении может быть получена из сравнения 3D-распределений ЯМР по измерениям при многочисленных глубинах исследования на формации. Для визуализации данных 3D-информация (T2, T1 и диффузия) обычно сворачивается в 2D-проекцию. В приведенных ниже примерах карты D-T1 созданы из 3D-распределения. Для иллюстрации способа настоящего изобретения представлен отдельный пример, в котором 4-е измерение является радиальным расстоянием на формации (т.е. ГИ). Вместе с тем, изобретение этим не ограничено и может включать в себя вариант реализации, в котором 4-е измерение не является радиальным расстоянием на формации, но представляет собой другое измерение, например время. Например, два измерения, выполненные в некоторые разнесенные моменты времени, могут быть проанализированы точно таким же образом, и количеством будет "изменение времени". Это должно использоваться для объединения каротажа бурового ЯМР с ЯМР измерениями на вспомогательном тросе, чтобы различия методик проникновения могли быть приняты во внимание.
Данные в приведенном ниже примере (см. Фиг.1A-1D) были взяты из сланцевой воды и газоносных песков в буровой скважине с нефтяным исходным буровым раствором. Крайние левые D-T1 карты (Фиг.1A и 1С) получены из данных, взятых с ГИ 1,5 дюймов (Shell 1 МR SCANNERTM) на формации, и крайние правые карты D-T1 (Фиг.1B и 1D) - из данных, взятых с ГИ 2,7 дюймов (Shell 4 МR SCANNERTM). Самые нижние карты (Фиг.1С и 1D) получены из водного песка, и самые верхние карты (Фиг.1A и 1B) - из газоносного песка.
При переходе от 1,5 к 2,7 дюймам можно видеть (Фиг.1С и 1D), что сигнал нефтяного исходного бурового раствора уменьшается и сигнал от воды увеличивается в водном песке. Аналогично, на верхних картах (Фиг.1A и 1B) можно видеть, что сигнал нефтяного исходного бурового раствора уменьшается, и газовый сигнал увеличивается с увеличением радиальной глубины исследования.
Хорошо известно, что интенсивность сигнала ЯМР связана со значением напряженности магнитного поля. Для устройств ЯМР в месторождении нефти напряженность магнитного поля на формации уменьшается с радиусом. Таким образом, отношение сигнал/шум оказывается меньше для измерений при более глубоком исследовании, по сравнению с поверхностным. Это является поводом для объединения пакетов затухающих эхо-сигналов из различных радиальных глубин исследования для улучшения отношения сигнал/шум, особенно для более глубоких измерений. Вместе с тем, наблюдаемые эффекты проникновения указывают, что измерения должны анализироваться раздельно. Настоящий способ увеличивает общее отношение сигнал/шум при сохранении целостности радиального проникновения.
Обычно жидкость формации в больших порах заменяется, оставляя при этом жидкость в меньших порах нетронутой. На картах D-T1, показанных на Фиг.1A-1D, области, связанные с изменениями от проникновения, являются областями с последующими компонентами T1 (свободная жидкость). Участки карты, не предполагающие радиальное изменение, являются областями, связанными с предыдущими компонентами T1 (связанная жидкость).
В одном варианте реализации настоящего изобретения пакеты затухающих эхо-сигналов от двух экспериментов объединены и описаны общей моделью (решением) так, что связанная жидкость обобщена, тогда как свободная жидкость сохранена различающейся. Под термином "общая" подразумевается, что имеется соотношение между конкретным свойством формации (например, связанная вода) в двух экспериментах, и под термином "различающаяся" подразумевается, что такое соотношение отсутствует. Обычно две независимых карты D-T1 выполнены из данных, полученных с Shell 1 и Shell 4 (например, Фиг.1A и 1B). Вместо создания независимых карт, распределения D-T1 создаются с использованием пакетов затухающих эхо-сигналов из Shell 1 и Shell 4 совместно. Это может быть сделано выбором различных весовых коэффициентов для связанных жидкостей и свободных жидкостей в Shell 1 и Shell 4. При обратном преобразовании два распределения создаются с использованием выбранных весовых коэффициентов.
Конкретные весовые коэффициенты могут быть выбраны так, что:
(1) вес, примененный к данным Shell 1 и данным Shell 4, составляет 0,5 для связанной жидкости для каждого распределения. Конечный результат заключается в том, что связанная жидкость в двух распределениях идентична и рассчитывается с использованием всех данных от обоих экспериментов; и
(2) вес, примененный к данным Shell 1, равен единице для свободной жидкости из распределения Shell 1 и нулю - для свободной жидкости из распределения Shell 4. Аналогично, вес, примененный к данным Shell 1, - нулю для свободной жидкости из распределения Shell 4 и единице - для свободной жидкости из распределения Shell 4. Конечный результат заключается в том, что свободная жидкость из распределения Shell 1 рассчитывается с использованием данных Shell 1 и свободная жидкость из распределения Shell 4 рассчитывается с использованием данных Shell 4.
Таким образом, два распределения имеют независимые свободные жидкости, но идентичные связанные жидкости. Отношение сигнал/шум значительно возрастает для связанной жидкости при небольшом, но положительном эффекте для свободной жидкости. Следует отметить, что весовые коэффициенты для связанной жидкости в этом примере равны, но изобретение этим случаем не ограничивается.
Математически эта процедура может быть записана как:

Здесь echo1 и echo2 описывают эхо-сигналы данных Shell 1 и Shell 4. W1 и W2 - диагональные матрицы с весовыми функциями, описанными выше на основной диагонали. Kernel 1 и Kernel 2 - ядра измерения для Shell 1 и 4 соответственно. Следует отметить, что это может отличаться, поскольку могут отличаться их соответствующие параметры сбора данных (например, интервал эхо-сигналов и градиент). Решение состоит из двух частей: sol1 и sol2. Это решение может быть рассчитано с использованием стандартного обратного преобразования, например способом регуляризации Тихонова, или с использованием предшествующей техники обратного преобразования максимальной энтропии. Для каждой отдельной оболочки решение может быть записано как:
sol_sh1=W1·sol1+W2·sol2 и sol_sh4=W2·sol1+W1·sol2. Поскольку весовые функции W1 и W2 идентичны для области объема связанной жидкости, то оба решения будут идентичны в этой области. Вместе с тем, оба решения могут быть различающимися в области объема свободной жидкости.
Следует отметить, что этот способ легко может быть распространен для обычного обратного преобразования трех оболочек или других комбинаций измерений (например, основная антенна Shell 3 и антенна высокого разрешения МR SCANNERTM). Следует отметить далее, что время отсечки для T2 для перехода может выбираться иначе и необязательно должно совпадать с временем отсечки T1 или T2 для связанного объема жидкости. Основное предположение заключается в том, что отклик для обеих оболочек идентичен для жидкостей с T1 или T2 более короткими, чем время отсечки, поскольку оно может меняться для жидкостей с большим временем релаксации. На практике время отсечки выбирается исходя из ожидаемого профиля проникновения и/или времен релаксации бурового раствора.
Для дальнейшей иллюстрации способа был создан обобщенный набор данных. Были созданы пакеты затухающих эхо-сигналов с использованием параметров съемки, показанных в Таблице 1.
Параметры последовательности ЯМР
Объемы формации с соответствующими свойствами ЯМР, показанные в Таблице 2, были использованы для создания данных.
Входящие жидкости
Сто реализаций были созданы с 2 и 4 параметрами пористость/эхо-сигнал при случайном Гауссовом шуме в применении к Shell 1 и Shell 4 соответственно.
Пакеты затухающих эхо-сигналов были затем подвергнуты процессу обратного преобразования, и полученные 3D-карты анализировались на пористость и содержание жидкости. Результаты обратного преобразования показаны на Фиг.2A-2D. Данные, показанные на Фиг.2A-2D, являются комплексными и отображают нефтеносный песок, захваченный фильтратом исходного водного бурового раствора. Связанная жидкость - крайняя левая яркая точка на водной линии. Фильтрат бурового раствора - крайняя правая яркая точка на водной линии. Формация нефти - яркая точка на нефтяной линии.
Свободная жидкость изменяется от большего к меньшему при переходе от распределения #1 (Фиг.2А) к распределению #2 (Фиг.2C) с соответствующим увеличением в формации нефти. Связанная жидкость является общей в обоих распределениях.
Весовой коэффициент распределения играет важную роль в этом анализе. В этом примере имеются два весовых коэффициента, по одному на каждое распределение. Весовые коэффициенты имеют глубину исследования на одной оси и общий логарифм T1 на второй оси. Амплитуда весового коэффициента показана на Z-оси. (см. Фиг.2B и 2D).
Для сравнения с предшествующим уровнем техники обратное преобразование выполнялось дважды. Вначале данные Shell 1 и данные Shell 4 рассчитывались независимо с использованием существующего MR3D. Затем способ для анализа ЯМР экспериментов с общими и различающимися свойствами был применен с использованием MR4D. Результаты показаны на Фиг.3A-3D и Фиг.4A-4D.
Легко видеть, что ответы Shell 4 (дорожка 2), рассчитанные независимо (MR3D), имеют наибольшее стандартное отклонение. Это исключает то, что связанная жидкость дает наибольший вклад в стандартное отклонение. Ясно, что ответы, рассчитанные с использованием общей связанной жидкости (MR4D) для всех глубин исследования, имеют меньшую изменчивость. В Таблице 3 показано стандартное отклонение связанной жидкости, свободной жидкости, нефти и общая пористость.
Статистические результаты
Представляет интерес сравнение связанной жидкости и общей пористости для Shell 1 с теми же величинами для Shell 4 (Фиг.4A-4D). Ясно видно, что результаты для связанной жидкости сильно различаются, если анализировать независимо, и близки, если применить для анализа способ ЯМР экспериментов с общими и различающимися свойствами.
Хотя приведенные выше примеры относятся конкретно к ЯМР-измерениям, способ настоящего изобретения может быть распространен на другие измерительные методики, например измерение сопротивления, акустические измерения, ядерные измерения, диэлектрические измерения и сейсмический каротаж. Например, для каротажа сопротивления общими свойствами формации могут быть сопротивление природной формации или сопротивление буровой жидкости, и различающимися свойствами формации могут быть сопротивления зоны проникновения для различных глубин исследования. Распределения сопротивления буровой жидкости и сопротивления природной формации могут быть постоянными, поскольку распределение зоны проникновения многозначно. В целом, распределение может быть единственным или многозначным.
Изобретение относится сейсмологии, а именно к способам исследования и определения свойств формаций. Настоящее изобретение включает в себя способ определения свойств формации с использованием двух или нескольких наборов данных, в котором решения, соответствующие наборам данных, отображают общие и различающиеся свойства формации. Способ анализирует наборы данных и рассчитывает распределения для общих и различающихся свойств формации, из которых определяются свойства формации. Технический результат после осуществления заявленного изобретения будет заключаться в получении высокоточных данных в одном наборе измерений (например, в поверхностной глубине исследования (ГИ)), для инвертирования одновременно с низкоточными данными (например, из большей ГИ) так, что получающиеся многочисленные решения следуют из высокоточных данных при сохранении некоторой степени независимости. 2 н. и 17 з.п. ф-лы, 4 ил., 3 табл.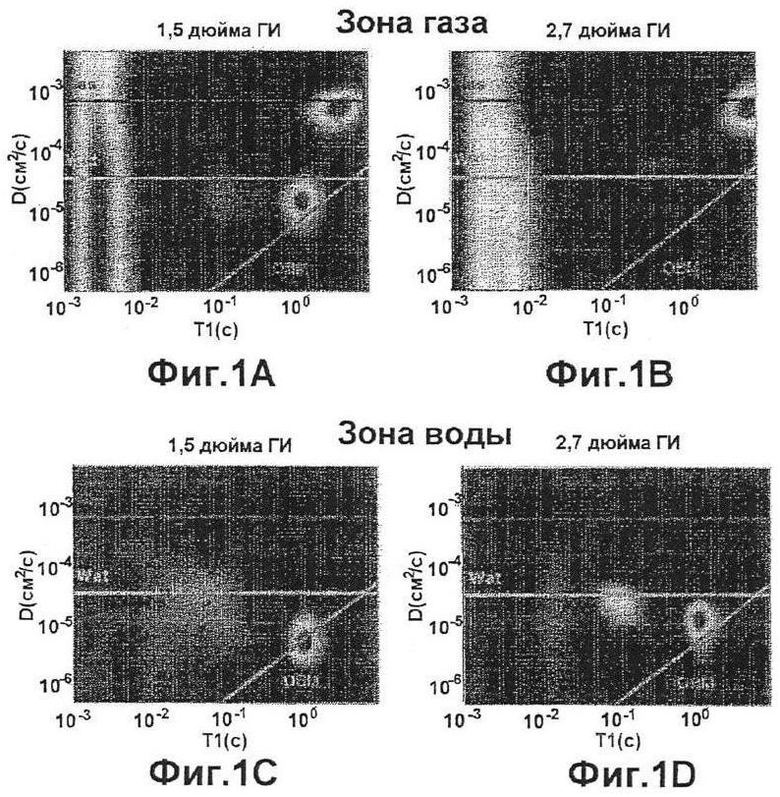
1. Способ для определения свойств формации с использованием каротажного прибора, расположенного в скважине, пронизывающей формацию, содержащий этапы, на которых получают два или несколько наборов данных с использованием каротажного прибора, причем наборы данных представляют собой измерения общих и различающихся свойств формации;
рассчитывают из наборов данных общее распределение для каждого общего свойства формации и различающееся распределения для каждого различающегося свойства формации; и
определяют свойства формации с использованием общих распределений и/или различающихся распределений.
2. Способ по п.1, в котором наборы данных зависят от одного или нескольких параметров измерения, выбранных из группы, состоящей из времени, времени ожидания, интервала эхо-сигнала, градиента поля, поляризации, глубины исследования, напряженности магнитного поля, частоты, отношения сигнал/шум, частоты дискретизации и частоты следования импульсов.
3. Способ по п.1, в котором каротажный прибор представляет собой прибор ядерного магнитного резонанса, прибор измерения сопротивления, акустический прибор, ядерный прибор, сейсмический прибор или любую комбинацию этих приборов.
4. Способ по п.1, в котором общие и различающиеся свойства формации содержат связанную жидкость, свободную жидкость, смачиваемость, продольное время релаксации, поперечное время релаксации, диффузию, ограниченность, гидравлическую проницаемость и пористость ЯМР.
5. Способ по п.1, в котором общие и различающиеся свойства формации содержат природное сопротивление, сопротивление зоны проникновения и сопротивление буровой жидкости.
6. Способ по п.1, в котором общие и различающиеся свойства формации содержат объем твердых составляющих, не перемещаемых и перемещаемых жидкостей, плотность и нейтронную пористость.
7. Способ по п.1, в котором общие и различающиеся свойства формации содержат форму поперечной волны, форму продольной волны, форму волны Стоунли, проницаемость Стоунли, модуль сдвига, модуль объемной упругости, коэффициент Пуассона, акустическую пористость и свойства на разрыв.
8. Способ по п.1, в котором общие свойства формации рассматриваются как равные, или иным образом связанные среди или между важных наборов данных и различающиеся свойства формации рассматриваются не связанными, свободно связанными, или их связь среди или между соответствующими наборами данных неизвестна.
9. Способ по п.1, в котором расчет включает в себя использование весовых коэффициентов для масштабирования откликов общих и различающихся свойств формации.
10. Способ по п.9, в котором весовые коэффициенты имеют функциональную зависимость.
11. Способ по п.1, в котором общие и различающиеся распределения построены графически как функции времени, поперечного времени релаксации, диффузии, продольного времени релаксации и радиального расстояния от скважины.
12. Способ по п.1, в котором расчет включает в себя выполнение обратного преобразования с использованием общих и различающихся наборов измерений.
13. Способ по п.12, в котором обратное преобразование выполняют одновременно с использованием некоторых или всех из двух или нескольких наборов данных.
14. Способ по п.12, в котором выполнение включает в себя частичное объединение решений для различных наборов данных.
15. Способ определения свойств формации с использованием каротажного прибора, расположенного в скважине, пронизывающей формацию, содержащий этапы, на которых:
получают два или несколько наборов данных с использованием каротажного прибора, причем наборы данных представляют собой измерения общих и различающихся свойств формации;
используют весовые коэффициенты для масштабирования откликов общих и различающихся свойств формации;
выполняют обратное преобразование с использованием общих и различающихся наборов измерений; и
рассчитывают из наборов данных общее распределение для каждого общего свойства формации и различающееся распределение для каждого различающегося свойства формации;
определяют свойства формации с использованием общих распределений и/или различающихся распределений.
16. Способ по п.15, в котором весовые коэффициенты имеют функциональную зависимость.
17. Способ по п.15, в котором обратное преобразование выполняется одновременно с использованием некоторых или всех из двух или нескольких наборов данных.
18. Способ по п.15, в котором выполнение включает в себя частичное объединение решений для различных наборов данных.
19. Способ по п.15, в котором каротажный прибор представляет собой прибор ядерного магнитного резонанса, прибор измерения сопротивления, акустический прибор, ядерный прибор, сейсмический прибор или любую комбинацию этих приборов.
| US 6512371 В2, 28.01.2003 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИКИ ПОРИСТОЙ ПОДЗЕМНОЙ ФОРМАЦИИ | 1995 |
|
RU2134894C1 |
| ПРИСПОСОБЛЕНИЕ К ПРЕССУ ОДНОСТОРОННЕГО ДЕЙСТВИЯ, | 0 |
|
SU147316A1 |
| Аппарат непрерывного действия для скручивания чая | 1957 |
|
SU114728A1 |

