Область техники, к которой относится изобретение
Раскрытый здесь предмет обсуждения, в целом, относится к определению местоположения и, в частности, к способу и устройству для осуществления определения местоположения на основе области для терминалов в сети беспроводной связи.
Уровень техники
Часто бывает желательно, а иногда и необходимо, знать местоположение пользователя беспроводной связи. Например, Федеральная комиссия связи (FCC) одобрила отчет и порядок усовершенствованной 911 (E-911) беспроводной службы, которая требует, чтобы местоположение беспроводного терминала (например, сотового телефона) предоставлялось оператору общественной безопасности (PSAP) всякий раз, когда с терминала делают вызов 911. В дополнение к мандату FCC, поставщик услуг может обеспечивать различные приложения с использованием служб определения местоположения (т.е. служб, которые идентифицируют местоположение беспроводного терминала). Такие приложения могут включать в себя, например, тарификацию с учетом местоположения, отслеживание активов, мониторинг и восстановление активов, управление флотом и ресурсами, услуги определения местоположения персонала, услуги консьержа и т.д.
Местоположение беспроводного терминала можно оценивать разными методами, включая "дальностный" и "позиционный" методы. Дальностный метод использует ряд дальностных измерений для вычисления местоположения терминала. Дальностные измерения включают в себя измерения, которые можно использовать для определения фактического расстояния между передатчиком и терминалом. Альтернативно, измерение дальности может быть относительным расстоянием от терминала до совокупности передатчиков. В случае измерения относительного расстояния, расстояние между терминалом и каждым передатчиком неизвестно, имеется общее смещение, добавленное к каждому значению расстояния. Следует понимать, что значение может быть отрицательным. Некоторые примеры дальностных измерений включают в себя, но без ограничения, псевдодальности, фактические дальности, оценки времени и оценки ориентации. Дальностные измерения можно получать от одной или нескольких систем определения местоположения. В частности, оценку местоположения в глобальной системе позиционирования (ГСП, GPS) можно получить из дальностных измерений (т.е. псевдодальностей) от ряда спутников в ГСП. Альтернативно, оценку местоположения УТПЛ (AFLT) (усовершенствованная трилатерация прямой линии связи) можно вычислить из дальностных измерений для ряда базовых станций в системе сотовой связи (например, в системе множественного доступа с кодовым разделением каналов (CDMA)). Кроме того, смешанную оценку местоположения можно вычислить из дальностных измерений для ряда спутников и базовых станций.
Позиционный метод использует знание местоположения приемопередающей подсистемы базовой станции (БППС, BTS), которая "обслуживает" терминал (т.е. находится на связи с терминалом) для оценки местоположения терминала. Таким образом, терминал должен быть в пределах известного ограниченного радиуса обслуживающей БППС с тех пор, как они находятся на связи. Обычно, каждая БППС обслуживает заданную область, обычно именуемую "сотой". Соты могут делиться на "секторы". Это обычно обеспечивается посредством разных антенн, подключенных к БППС, которые покрывают разные сектора соты. Таким образом, терминалы в любом секторе можно отличить от терминалов во всех остальных секторах на основании антенны, через которую установлена связь с терминалами.
Затем, приближенное местоположение терминала можно оценить как (1) центр сектора БППС, либо (2) местоположение антенны БППС, либо (3) внешне обеспеченное местоположение, либо (4) местоположение по умолчанию, либо (5) некоторое другое местоположение, некоторым образом связанное с местоположением БППС. Оценка местоположения, вычисленная с использованием позиционного метода, менее точна, чем дальностная оценка местоположения. Тем не менее, позиционная оценка местоположения может быть полезна как первоначальная оценка. Затем такую первоначальную оценку можно использовать для помощи в вычислении дальностной оценки местоположения. Позиционная оценка также может быть полезна в качестве окончательной оценки, если дальностная оценка местоположения либо недоступна, либо имеет низкое качество.
Независимо от того, как вычисляется оценка местоположения, чрезвычайно желательно обеспечить как можно более точную приближенную оценку местоположения терминала. Поскольку дальностные оценки не всегда доступны или точны, было бы полезно иметь возможность более точно вычислять местоположение беспроводного терминала с использованием позиционного метода.
Сущность изобретения
В этом документе описаны способ и устройство, которые позволяют более точно оценивать приближенное местоположение терминала в сети беспроводной связи. Согласно одному варианту осуществления способа и устройства, приближенное местоположение терминала оценивается на основании "ожидаемой области", связанной с "опорной приемопередающей подсистемой базовой станции (БППС)". Опорной БППС может быть любая БППС, с которой терминал поддерживает связь. Ожидаемая область, связанная с БППС, это область, в которой, вероятно, находится терминал при том условии, что он принимает сигналы от БППС. Ожидаемая область это: (1) местоположение, которое может быть обеспечено как оценочное местоположение терминала, и (2) область, в которой, вероятно, находится терминал, причем вероятность может быть задана любым конкретным процентным соотношением. Ожидаемую область, связанную с каждой БППС, можно моделировать на основании различных параметров, например, местоположения и ориентации антенны БППС, максимальной дальности антенны (МДА, MAR) и т.д.
Согласно другому варианту осуществления раскрытых способа и устройства, более точную позиционную оценку местоположения терминала оценивают, комбинируя ожидаемые области многочисленных БППС. Терминал может принимать сигналы от ряда БППС в сети беспроводной связи. Однако, для определения оценки местоположения терминала не обязательно использовать информацию, связанную со всеми БППС, от которых принимаются сигналы. БППС называют "измеренной" БППС, если информация, связанная с этой БППС, используется для аппроксимации местоположения терминала. Ожидаемые области для измеренных БППС можно комбинировать для определения комбинированной ожидаемой области, которую затем можно обеспечивать как позиционную оценку местоположения терминала.
Согласно еще одному варианту осуществления раскрытых способа и устройства, центр и размер ожидаемой области, связанной с каждой измеренной БППС, можно регулировать на основании различных факторов до комбинирования. Эти факторы включают в себя: (1) уровень принятого сигнала для сигнала БППС, принятого в терминале (который обычно обозначается как  ), (2) принимаемую мощность для БППС (которая обычно обозначается как
), (2) принимаемую мощность для БППС (которая обычно обозначается как  ), или (3) какой-либо другой фактор. Отрегулированные ожидаемые области для всех измеренных БППС можно затем комбинировать для определения комбинированной ожидаемой области.
), или (3) какой-либо другой фактор. Отрегулированные ожидаемые области для всех измеренных БППС можно затем комбинировать для определения комбинированной ожидаемой области.
Согласно еще одному варианту осуществления раскрытых способа и устройства, позиционная оценка местоположения терминала, которая может быть определена согласно одному из вышеописанных вариантов осуществления, комбинируется с некоторой другой оценкой местоположения терминала для определения еще более точной оценки местоположения терминала. Другую оценку местоположения можно, например, выводить на основании ГСП, УТПЛ, или обеих ГСП и УТПЛ.
Различные аспекты и варианты осуществления раскрытых способа и устройства более подробно описаны ниже. В частности, ниже подробно описаны методы, программные коды, цифровые сигнальные процессоры, терминалы, системы и другие устройства и элементы, которые реализуют различные аспекты, варианты осуществления и признаки раскрытых способа и устройства.
Краткое описание чертежей
Признаки, природа и преимущества настоящего изобретения станут более понятны из подробного описания, изложенного ниже в сочетании с чертежами, снабженными сквозной системой обозначений, в которых:
фиг.1 - схема сети беспроводной связи;
фиг.2 - схема, иллюстрирующая секторизованные области покрытия для четырех БППС, показанных на фиг.1;
фиг.3 - схема, иллюстрирующая моделирование ожидаемой области, связанной с каждой БППС в сети;
фиг.4 - схема, графически иллюстрирующая использование многочисленных ожидаемых областей для многочисленных измеренных БППС для вычисления более точной оценки местоположения терминала;
фиг.5А и 5В - схемы, иллюстрирующие моделирование ожидаемых областей для двух разных БППС;
фиг.6А и 6В - схемы, иллюстрирующие регулировку ожидаемой области, связанной с БППС, на основании уровня принятого сигнала;
фиг.7А - схема, иллюстрирующая комбинирование двух перекрывающихся ожидаемых областей  и
и  на основании взвешенного среднего для вывода комбинированной ожидаемой области;
на основании взвешенного среднего для вывода комбинированной ожидаемой области;
фиг.7В - схема, иллюстрирующая комбинирование двух неперекрывающихся ожидаемых областей и на основании взвешенного среднего для вывода комбинированной ожидаемой области;
фиг.8 - логическая блок-схема процесса вывода более точной приближенной оценки местоположения с использованием определения местоположения на основе области; и
фиг.9 - упрощенная блок-схема различных элементов сети, показанной на фиг.1.
Подробное описание
На фиг.1 показана схема сети 100 беспроводной связи, которая может представлять собой сеть множественного доступа с кодовым разделением каналов (CDMA), сеть множественного доступа с временным разделением каналов (TDMA), сеть множественного доступа с частотным разделением каналов (FDMA) или сеть беспроводной связи другого типа. Сеть CDMA может быть сконструирована в соответствии с одной или несколькими системами стандарта CDMA, например, системой IS-95, системой IS-2000 или системой W-CDMA. Сеть TDMA может быть сконструирована в соответствии с одной или несколькими системами стандарта TDMA, например, глобальной системой мобильной связи (GSM). Подробности этих стандартных систем общеизвестны в технике.
Сеть 100 включает в себя ряд приемопередающих подсистем базовых станций (БППС) 104, причем каждая БППС 104 обслуживает конкретную географическую область. Для простоты, на фиг.1 показаны только четыре БППС 104а-104d. Область покрытия БППС часто именуется "сотой". Область покрытия - это область, в которой терминал принимает сигналы от БППС 104. Размер и форма соты обычно зависят от различных факторов, как то рельеф, препятствия и т.д., и могут также изменяться со временем. Хотя некоторым привычно называть "сотой" БППС, в этом документе проводится различие между оборудованием, которое именуется здесь БППС, и областью покрытия, которое здесь именуется сотой.
Ряд терминалов 106 обычно распределены по сети. Для простоты, на фиг.1 показан только один терминал. БППС осуществляет передачу в терминал 106 по прямой линии связи, а терминал осуществляет передачу в БППС по обратной линии связи. Каждый терминал 106 может находиться в состоянии активной связи с одной или несколькими БППС. Одновременная активная связь между терминалом и более одной БППС называется "мягкой передачей обслуживания". Активная связь означает, что терминал зарегистрирован в сети, и БППС может идентифицировать его. Даже если терминал не находится в активной связи с БППС, он может принимать пилот-сигналы, пейджинговые сигналы и/или другие сообщения сигнализации от БППС. В примере, показанном на фиг.1, терминал 106 принимает пилот-сигналы от всех четырех БППС 104а-104d. Следует понимать, что просто прием пилот-сигнала от БППС не свидетельствует об активной связи между терминалом и БППС.
БППС 104 обычно поддерживают связь с контроллером 120 базовой станции (КБС, BSC), который координирует связь между БППС и терминалами, которые находятся в состоянии активной связи с БППС. Для определения местоположения, контроллер 120 базовой станции может осуществлять связь с объектом 130 определения местоположения (ООМ, PDE). ООМ 130 принимает информацию от контроллера 120 базовой станции и/или предоставляет ему информацию, согласно нижеприведенному подробному описанию.
В типичном развертывании сети каждая сота может быть разбита на несколько секторов (например, три сектора) для увеличения емкости сети (т.е. количества пользователей, которых система может одновременно поддерживать). Каждый сектор обслуживается соответствующей БППС. Для секторизованной соты, БППС, обслуживающая эту соту, включает в себя несколько БППС (например, три). Каждая БППС связана с соответствующим сектором в этой соте. На фиг.2 показана схема, иллюстрирующая систему, имеющую четыре "секторизованные" соты с соответствующими четырьмя БППС.
В примере, показанном на фиг.2, сота, покрытая каждой БППС, представлена идеальным кругом. Каждый сектор соты представлен в виде идеального сектора 210 круга с углом 120°. В фактическом развертывании сети, сота, покрытая каждой БППС, обычно имеет форму, отличающуюся от идеального круга, в зависимости от различных вышеуказанных факторов. Кроме того, секторы секторизованной соты обычно перекрываются по краям. Для простоты на фиг.2 показаны только пять секторов  для четырех сот обслуживаемых БППС 105a-105d.
для четырех сот обслуживаемых БППС 105a-105d.
Как отмечено выше, часто бывает желательно, а иногда обязательно, знать местоположение беспроводного терминала. Местоположение терминала можно оценить с использованием дальностного и позиционного методов. В рамках дальностного метода, используется ряд дальностных измерений (например, дальности, псевдодальности и т.д.) для вычисления оценки местоположения терминала. Каждое дальностное измерение производится по отношению к передатчику (например, спутнику или БППС). Дальностная оценка местоположения обычно имеет более высокую точность. Однако, в некоторых случаях, может не быть достаточного количества дальностных измерений для вычисления дальностной оценки местоположения.
Различные варианты осуществления раскрытых способа и устройства описаны здесь для обеспечения более точной позиционной оценки местоположения терминала. Согласно одному варианту осуществления, приближенное местоположение терминала оценивают на основании "ожидаемой области", связанной с "опорной БППС". Опорной БППС может быть любая БППС, с которой терминал осуществляет связь. В используемом здесь смысле, ожидаемая область, связанная с передатчиком, например, БППС, это область, в которой вероятно находится терминал, при условии, что терминал способен принимать сигналы от передатчика. Ниже описано моделирование ожидаемой области, связанной с каждой БППС.
Согласно другому варианту осуществления, более точная позиционная оценка местоположения терминала определяется путем комбинирования ожидаемых областей, связанных с несколькими БППС. Согласно еще одному варианту осуществления, центр и размер ожидаемой области, связанной с каждой измеренной БППС, можно регулировать на основании различных факторов до комбинирования. БППС называется "измеренной" БППС, если информация, связанная с БППС, используется для аппроксимации местоположения терминала. Факторы, которые можно использовать для регулировки ожидаемых областей измеренных БППС, включают в себя: (1) уровень принятого сигнала, (2) принимаемую мощность и т.д. Ниже описаны дополнительные факторы и способ использования этих факторов. Затем, отрегулированные ожидаемые области для измеренных БППС комбинируются для определения комбинированной ожидаемой области.
Согласно еще одному варианту осуществления, позиционную оценку местоположения терминала можно комбинировать с некоторой другой оценкой местоположения терминала, чтобы еще точнее оценить местоположение терминала. Другая оценка местоположения может быть выведена из ГСП, УТПЛ, или совместно ГСП и УТПЛ. Эти различные варианты осуществления раскрытых способа и устройства более подробно описаны ниже.
На фиг.3 показана схема, иллюстрирующая ожидаемую область, связанную с каждой БППС, в сети, показанной на фиг.2. Ожидаемая область, связанная с каждой БППС, показанная на фиг.3, моделируется в виде круга 314, который выражает определенную вероятность (например, 1-сигма или вероятность 67%), что терминал, принимающий сигналы от БППС, находится в ожидаемой области. Соответственно, если терминал принимает сигналы от данной БППС, имеется вероятность 67% того, что терминал находится в ожидаемой области, связанной с этой БППС.
Каждая ожидаемая область связана с местоположением, которое может быть обеспечено как оценочное местоположение терминала при условии, что он принимает сигнал от БППС. Это местоположение обычно является центром ожидаемой области. Однако в качестве оценки местоположения можно также обеспечить некоторое другое местоположение в ожидаемой области. Согласно фиг.3, центр каждой ожидаемой области помечен как "×" 312. Центр, размер и форма ожидаемой области могут быть обеспечены как часть позиционной оценки местоположения терминала. Центр ожидаемой области будет представлять оценочное местоположение терминала, а размер и форма ожидаемой области будет представлять определенность в использовании центра ожидаемой области как оценочного местоположения терминала.
Размер, форму и центр ожидаемой области, связанной с каждой БППС, можно определить на основании одного или нескольких параметров. Некоторые параметры могут относиться к БППС, например: (1) местоположению и ориентации антенны БППС, (2) максимальной дальности антенны и т.д. Другие параметры могут относиться к физическим атрибутам области покрытия БППС, например: (1) рельефу, (2) препятствиям и т.д. Кроме того, некоторые параметры могут относиться к информации о других особенностях области покрытия БППС, например, к статическому распределению пользователей терминалов в области покрытия.
В примере, показанном на фиг.3, терминал 106 находится в/вблизи зоны перекрытия ожидаемых областей  и
и  . Тогда местоположение терминала можно оценивать либо как (1) центр ожидаемой области , если опорной БППС терминала является БППС 105a, либо как (2) центр ожидаемой области , если опорной БППС является БППС 105d.
. Тогда местоположение терминала можно оценивать либо как (1) центр ожидаемой области , если опорной БППС терминала является БППС 105a, либо как (2) центр ожидаемой области , если опорной БППС является БППС 105d.
Согласно вышеприведенному примеру, позиционная оценка местоположения обычно имеет низкую точность. Тем не менее, позиционная оценка местоположения может иметь ценность как первоначальная оценка, которую затем можно использовать для вычисления дальностной оценки местоположения. Альтернативно, позиционную оценку можно использовать в качестве окончательной оценки, если дальностная оценка местоположения неточна или недоступна. В любом случае, крайне желательно обеспечить как можно более точную позиционную оценку местоположения.
На фиг.4 показана схема, которая графически иллюстрирует использование нескольких ожидаемых областей, каждая из которых связана с соответствующей одной из нескольких измеренных БППС, для более точной оценки местоположения терминала 106. Терминал 106 может принимать сигналы от БППС 105a-105e. Из пяти принимаемых БППС, только три БППС, 105a, 105d и 105e, используются для аппроксимации местоположения терминала. Соответственно, как отмечено выше, эти три БППС, 105a, 105d и 105e, называются измеренными БППС для терминала. Затем, ожидаемые области для измеренных БППС 105a, 105d и 105e определяются (например, извлекаются из блока хранения) и могут регулироваться (например, на основании уровня принятых сигналов).
Затем, отрегулированные и/или не отрегулированные ожидаемые области для измеренных БППС комбинируются для обеспечения комбинированной ожидаемой области, имеющей центр в местоположении 412 и размер и форму, представленные на фиг.4 кругом 414. Затем, центр, размер и форму комбинированной ожидаемой области можно обеспечить как оценку местоположения терминала.
Согласно фиг.4, комбинированная ожидаемая область представляет более точную аппроксимацию местоположения терминала 106, чем любая из пяти отдельно взятых ожидаемых областей  , показанных на фиг.4. В частности, центр комбинированной ожидаемой области является более точной оценкой местоположения терминала, чем центр любой отдельно взятой ожидаемой области. Кроме того, неопределенность, связанная с использованием центра комбинированной ожидаемой области в качестве оценочного местоположения терминала, вероятно, будет меньше, чем неопределенность, связанная с использованием центра любой из трех отдельно взятых ожидаемых областей
, показанных на фиг.4. В частности, центр комбинированной ожидаемой области является более точной оценкой местоположения терминала, чем центр любой отдельно взятой ожидаемой области. Кроме того, неопределенность, связанная с использованием центра комбинированной ожидаемой области в качестве оценочного местоположения терминала, вероятно, будет меньше, чем неопределенность, связанная с использованием центра любой из трех отдельно взятых ожидаемых областей  ,
,  и
и  , которые использовались для определения комбинированной ожидаемой области. Иными словами, тот факт, что круг 414 меньше кругов, задающих отдельные ожидаемые области, указывает, что большее количество терминалов, которые, как предполагается, находятся в комбинированной ожидаемой области, будут располагаться ближе к центру (т.е. в меньшем круге).
, которые использовались для определения комбинированной ожидаемой области. Иными словами, тот факт, что круг 414 меньше кругов, задающих отдельные ожидаемые области, указывает, что большее количество терминалов, которые, как предполагается, находятся в комбинированной ожидаемой области, будут располагаться ближе к центру (т.е. в меньшем круге).
На фиг.5А и 5В показаны схемы, иллюстрирующие моделирование ожидаемых областей для двух разных БППС. Согласно фиг.5А, БППС 105x призвана обеспечивать покрытие секторообразной области 510a с углом приблизительно 120°, причем внешняя граница секторообразной области определяется максимальной дальностью антенны (МДА) БППС. Ожидаемую область, связанную с этой БППС, можно моделировать в виде секторообразной области 510a, круга 514а или некоторой другой комбинации формы и размера. Центр ожидаемой области 512a можно обеспечить как оценочное местоположение терминала.
Согласно фиг.5В, БППС 105y призвана обеспечивать покрытие меньшей секторообразной области 510b, причем внешняя граница этой секторообразной области также определяется максимальной дальностью антенны БППС. Ожидаемую область, связанную с этой БППС, можно моделировать как секторообразную область 510b, круг 514b, или некоторую другую комбинацию формы и размера. Опять же, центр ожидаемой области 512b можно обеспечить как оценочное местоположение терминала.
Согласно обеим фиг.5А и 5В, ожидаемая область моделируется на основании двухмерного нормального распределения Гаусса. В этой модели, вероятность того, что терминал находится в центре или вблизи центра области покрытия БППС, больше, чем на удалении от центра области покрытия. Затем можно задать круг или какую-либо другую форму, представляющую область, в которой, с определенной достоверностью, находится терминал, при условии, что он может принимать сигналы от БППС. Для круглой ожидаемой области 1-сигма, имеется 39-процентная достоверность того, что терминал находится в ожидаемой области, если он принимает сигналы от БППС. Ожидаемую область можно задать для любой данной достоверности, но обычно используется 1-сигма. Таким образом, ожидаемую область задают на основании некоторого статистического параметра, а не просто как круг строго определенного радиуса.
Ожидаемую область 1-сигма можно определить на основании различных формул. Согласно одному варианту осуществления, ожидаемая область 1-сигма задана осью 1-сигма,  , которую можно выразить следующим образом:
, которую можно выразить следующим образом:

Согласно уравнению 1, ось 1-сигма,  (которая соответствует радиусу кругов 514a и 514b, показанных на фиг.5А и 5В) выводится на основании оценочной максимальной дальности антенны (МДА) БППС. Согласно другому варианту осуществления, ожидаемая область 1-сигма задана горизонтальной ошибкой оценочного местоположения (ГООМ) 1-сигма,
(которая соответствует радиусу кругов 514a и 514b, показанных на фиг.5А и 5В) выводится на основании оценочной максимальной дальности антенны (МДА) БППС. Согласно другому варианту осуществления, ожидаемая область 1-сигма задана горизонтальной ошибкой оценочного местоположения (ГООМ) 1-сигма,  , которую можно выразить следующим образом:
, которую можно выразить следующим образом:

Согласно уравнению (2), ГООМ 1-сигма, , также выводится на основании максимальной дальности антенны БППС. Можно также использовать другие формулы для ожидаемой области 1-сигма.
Согласно обеим фиг.5А и 5В, круги 514a и 514b не нарисованы в масштабе, если ось 1-сигма,  , либо ГООМ 1-сигма, , используется как радиус ожидаемых областей 1-сигма, представленных кругами 514a и 514b.
, либо ГООМ 1-сигма, , используется как радиус ожидаемых областей 1-сигма, представленных кругами 514a и 514b.
В общем случае, для ожидаемой области, связанной с каждой БППС, можно использовать разные формы, размеры и положения центра, в зависимости от параметров, используемых для моделирования ожидаемой области. В одной реализации, для ожидаемой области, связанной с каждой БППС, используется модель круга. Модель круга для ожидаемой области особенно хороша, если распределение терминалов в области покрытия БППС аппроксимируется круговым шаблоном. Круговая статистическая модель также допускает удобную математическую формализацию, что следует из дальнейшего рассмотрения.
Согласно другому варианту осуществления раскрытых способа и устройства, центр и размер ожидаемой области, связанной с каждой измеренной БППС, можно регулировать на основании одного или нескольких факторов. Если имеется только информация, что терминал принимает сигнал от БППС, то ожидаемую область, связанную с этой БППС, без какой-либо регулировки, можно обеспечивать как приближенную оценку местоположения терминала. Если же имеется другая информация для терминала, то ожидаемую область, связанную с БППС, можно регулировать на основании дополнительной информации, чтобы более точно определить ожидаемую область, связанную с этим терминалом.
Для регулировки ожидаемой области, связанной с БППС, для данного терминала можно использовать различные факторы. Одним таким фактором является уровень принятого сигнала, который обычно выражается как отношение энергии элементарного сигнала к суммарному шуму ( ). Уровень принятого сигнала можно определить на основании измерения пилот-сигнала или некоторой другой передачи от БППС. Альтернативно, уровень принятого сигнала можно определять на основании сигнала обратной линии связи, принятого в БППС от терминала.
). Уровень принятого сигнала можно определить на основании измерения пилот-сигнала или некоторой другой передачи от БППС. Альтернативно, уровень принятого сигнала можно определять на основании сигнала обратной линии связи, принятого в БППС от терминала.
Уровень принятого сигнала на терминале для данной БППС можно отобразить в масштабный коэффициент. Этот масштабный коэффициент можно затем использовать для регулировки ожидаемой области, связанной с БППС. В одной реализации, =0 дБ отображается в масштабный коэффициент 0,9 (т.е.  =0,9), а =-40 дБ отображается в масштабный коэффициент 1,1 (т.е.
=0,9), а =-40 дБ отображается в масштабный коэффициент 1,1 (т.е.  =1,1). Затем можно использовать линейную интерполяцию для определения масштабного коэффициента для других значений уровня принятого сигнала. Для этой реализации, масштабный коэффициент
=1,1). Затем можно использовать линейную интерполяцию для определения масштабного коэффициента для других значений уровня принятого сигнала. Для этой реализации, масштабный коэффициент  можно выразить следующим образом:
можно выразить следующим образом:

Масштабный коэффициент также можно ограничить конкретным диапазоном значений (например, 0,9< <1,1). Масштабный коэффициент, меньший единицы, сокращает или стягивает ожидаемую область, а масштабный коэффициент, больший единицы, увеличивает ожидаемую область.
<1,1). Масштабный коэффициент, меньший единицы, сокращает или стягивает ожидаемую область, а масштабный коэффициент, больший единицы, увеличивает ожидаемую область.
В другой реализации, =0 дБ отображается в масштабный коэффициент 0,6 (т.е.  =0,6), а =-40 дБ отображается в масштабный коэффициент 1,4 (т.е. =1,4). Для определения масштабного коэффициента для других значений уровня принятого сигнала, опять же, можно использовать линейную интерполяцию. Для этой реализации, масштабный коэффициент
=0,6), а =-40 дБ отображается в масштабный коэффициент 1,4 (т.е. =1,4). Для определения масштабного коэффициента для других значений уровня принятого сигнала, опять же, можно использовать линейную интерполяцию. Для этой реализации, масштабный коэффициент  можно выразить следующим образом:
можно выразить следующим образом:

Эта реализация имеет более крутой наклон, чем вышеописанная. Следует понимать, что можно использовать и другое соответствие между уровнем принятого сигнала и масштабным коэффициентом.
Другой фактор, который можно использовать для регулировки ожидаемой области, связанной с БППС для данного терминала, представляет собой принимаемую мощность сигнала от БППС, измеренную на терминале. Эту принимаемую мощность можно выразить как энергию элементарного сигнала ( ), учитывая только полезный сигнал и игнорируя шум и помеху (
), учитывая только полезный сигнал и игнорируя шум и помеху ( ). Принимаемую мощность также можно вычислять из пилот-сигнала, передаваемого БППС, или из какого-либо другого компонента сигнала. Затем принимаемую мощность можно отображать в масштабный коэффициент, который можно выразить следующим образом:
). Принимаемую мощность также можно вычислять из пилот-сигнала, передаваемого БППС, или из какого-либо другого компонента сигнала. Затем принимаемую мощность можно отображать в масштабный коэффициент, который можно выразить следующим образом:

где  - некоторая заданная функция
- некоторая заданная функция  .
.
Другим фактором, который можно учитывать при регулировке ожидаемой области, является уровень передаваемой мощности. Каждая БППС обычно передает свой сигнал на определенном уровне мощности, который определяет оператор сети. Оператор сети может задать одинаковый уровень передаваемой мощности для всех БППС. Альтернативно, для разных БППС могут быть заданы разные уровни. Таким образом, информацию об уровнях передаваемой мощности БППС также можно использовать для регулировки ожидаемых областей. Затем, принимаемую мощность ( ) и уровень передаваемой мощности (
) и уровень передаваемой мощности ( ) можно отображать в масштабный коэффициент, который можно выразить следующим образом:
) можно отображать в масштабный коэффициент, который можно выразить следующим образом:

где  - некоторая заданная функция
- некоторая заданная функция  и
и  . В порядке конкретного примера, принимаемые мощности от БППС можно нормализовать, чтобы учитывать другие уровни передаваемой мощности, используемые разными БППС. Затем нормализованные принимаемые мощности можно использовать для регулировки ожидаемых областей БППС.
. В порядке конкретного примера, принимаемые мощности от БППС можно нормализовать, чтобы учитывать другие уровни передаваемой мощности, используемые разными БППС. Затем нормализованные принимаемые мощности можно использовать для регулировки ожидаемых областей БППС.
Еще одним фактором, который можно использовать для регулировки ожидаемой области, связанной с БППС, является двусторонняя задержка (ДСЗ) (задержка на прохождение сигнала в прямом и обратном направлениях). Терминал может идентифицировать наиболее ранний приходящий компонент многолучевого сигнала (достаточного уровня) для сигнала прямой линии связи от БППС. Можно определить время, когда этот компонент многолучевого сигнала достигает антенны терминала. Затем это время используется в качестве начала отсчета времени терминала. Затем терминал может передавать сигнал обратной линии связи обратно на БППС, так что БППС принимает сигнал обратной линии связи с задержкой по времени 2τ от времени передачи сигнала прямой линии связи. Эта задержка 2τ называется ДСЗ. ДСЗ можно измерять на БППС и использовать для регулировки ожидаемой области, связанной с БППС.
Согласно вышеописанному, размер ожидаемой области, связанной с БППС, можно регулировать на основании масштабного коэффициента, связанного с этой БППС. Масштабный коэффициент можно также использовать для перемещения центра ожидаемой области либо к номинальному центру, либо от него. Регулируя размер и центр ожидаемой области, вклад соответствующей БППС можно соответственно регулировать при выводе оценки местоположения терминала.
На фиг.6А и 6В изображены схемы, иллюстрирующие регулировку ожидаемой области, связанной с БППС, на основании уровня принятого сигнала. В силу потерь в такте в среде распространения, уровень мощности принятого сигнала на терминале обратно пропорционален квадрату расстояния от передающей БППС. Эта общая формула предполагает, что переданный сигнал не ухудшается за счет других феноменов передачи, например, многолучевого распространения. Таким образом, уровень принятого сигнала можно использовать для оценки расстояния между БППС (или антенной БППС) и терминалом. Затем, центр и размер ожидаемой области, связанной с БППС для этого терминала, можно регулировать на основании уровня принятого сигнала.
Согласно фиг.6А, уровень принятого сигнала высокий, что свидетельствует о том, что терминал, вероятно, находится ближе к передающей БППС. Затем, центр ожидаемой области можно переместить от номинального центра 612x к новому центру 612a, который ближе к БППС. Новый центр 612a находится на прямой линии между номинальным центром 612x и антенной БППС. Кроме того, новый центр 612a перемещается в конкретную точку на этой линии, определенную масштабным коэффициентом. Новый центр 612a находится в номинальном центре 612x, если масштабный коэффициент равен 1,0, и перемещается к БППС, если масштабный коэффициент меньше 1,0.
На фиг.6А показано также, что размер ожидаемой области также уменьшается от номинального размера до меньшего размера, представленного кругом 614a. Этот меньший размер более точно соответствует меньшей области, где можно принимать сигнал с высоким уровнем.
Согласно фиг.6В, уровень принятого сигнала низкий, что свидетельствует о том, что терминал, вероятно, расположен дальше от передающей БППС. Затем центр ожидаемой области можно переместить от номинального центра 612x к новому центру 612b, который располагается дальше (в радиальном направлении) от БППС. Кроме того, размер ожидаемой области может увеличиваться от номинального размера к большему размеру, представленному кругом 614b. Этот больший размер представляет большую область, где можно принимать такой слабый сигнал.
Регулировку ожидаемых областей можно также избирательно осуществлять для некоторых БППС и не для некоторых других БППС. Например, уровень принятого сигнала для каждой БППС можно наблюдать в течение конкретного интервала времени. Затем, ожидаемую область, связанную с каждой БППС, можно регулировать, если флуктуация уровня принятого сигнала ниже определенного порога, и не регулировать, если флуктуация больше определенного порога.
Кроме того, можно по отдельности выбирать масштабные коэффициенты для изменения размера ожидаемой области и для перемещения центра ожидаемой области. Например, масштабный коэффициент для размера ожидаемой области можно выбирать на основании  , а масштабный коэффициент для размера ожидаемой области можно выбирать на основании
, а масштабный коэффициент для размера ожидаемой области можно выбирать на основании  .
.
Согласно еще одному варианту осуществления раскрытых способа и устройства, более точную оценку местоположения терминала определяют, комбинируя ожидаемые области для многочисленных измеренных БППС. Ожидаемая область, связанная с каждой измеренной БППС, может быть отрегулированной или не отрегулированной, согласно описанному выше. Многочисленные ожидаемые области для измеренных БППС можно комбинировать разными способами для определения комбинированной ожидаемой области, которая затем обеспечивается как приближенная оценка местоположения терминала.
В одной реализации, комбинированная ожидаемая область определяется на основании взвешенного среднего ожидаемых областей для измеренных БППС. В простом случае, две ожидаемые области  и
и  двух измеренных БППС можно комбинировать для определения комбинированной ожидаемой области. Ожидаемую область
двух измеренных БППС можно комбинировать для определения комбинированной ожидаемой области. Ожидаемую область  для первой измеренной БППС можно определить с центром с декартовыми координатами (
для первой измеренной БППС можно определить с центром с декартовыми координатами ( ,
,  ) и размерами/формой, которая представлена первым кругом. Аналогично, ожидаемую область для второй измеренной БППС можно определить с центром с декартовыми координатами (
) и размерами/формой, которая представлена первым кругом. Аналогично, ожидаемую область для второй измеренной БППС можно определить с центром с декартовыми координатами ( ,
,  ) и размерами/формой, которая представлена вторым кругом. Затем центр комбинированной ожидаемой области можно задать с декартовыми координатами (
) и размерами/формой, которая представлена вторым кругом. Затем центр комбинированной ожидаемой области можно задать с декартовыми координатами ( ,
,  ), которые можно вычислить следующим образом:
), которые можно вычислить следующим образом:

где  и
и  являются весовыми коэффициентами, подлежащими использованию для ожидаемых областей и , соответственно, и
являются весовыми коэффициентами, подлежащими использованию для ожидаемых областей и , соответственно, и  . Весовые коэффициенты можно выводить согласно описанному ниже. Из уравнения (7) можно видеть, что каждая из декартовых координат (, ) центра комбинированной ожидаемой области равна взвешенному среднему этой координаты центров для двух комбинируемых ожидаемых областей.
. Весовые коэффициенты можно выводить согласно описанному ниже. Из уравнения (7) можно видеть, что каждая из декартовых координат (, ) центра комбинированной ожидаемой области равна взвешенному среднему этой координаты центров для двух комбинируемых ожидаемых областей.
В случае комбинирования более двух ожидаемых областей, уравнение (7) можно обобщить следующим образом:

где  - это количество комбинируемых ожидаемых областей, и
- это количество комбинируемых ожидаемых областей, и  .
.
Весовой коэффициент  , используемый для каждой ожидаемой области, можно определять на основании различных параметров. В одной реализации, весовой коэффициент для каждой ожидаемой области определяется на основании размера ожидаемой области. Для этой реализации, весовой коэффициент для
, используемый для каждой ожидаемой области, можно определять на основании различных параметров. В одной реализации, весовой коэффициент для каждой ожидаемой области определяется на основании размера ожидаемой области. Для этой реализации, весовой коэффициент для  -й ожидаемой области можно выразить в виде:
-й ожидаемой области можно выразить в виде:

где ГООМ - горизонтальная ошибка оценочного местоположения, которую можно выразить в виде

и σвосток и σсевер - значения дисперсии для восточного и северного направлений, связанных с  -й ожидаемой областью. В частности, σвосток - это расстояние от центра ожидаемой области до восточного (или правого) края круга один-сигма, а σсевер - это расстояние от центра ожидаемой области до северного (или верхнего) края круг один-сигма. Согласно уравнению (9), весовой коэффициент
-й ожидаемой областью. В частности, σвосток - это расстояние от центра ожидаемой области до восточного (или правого) края круга один-сигма, а σсевер - это расстояние от центра ожидаемой области до северного (или верхнего) края круг один-сигма. Согласно уравнению (9), весовой коэффициент  для -й ожидаемой области обратно пропорционален квадрату ГООМ этой ожидаемой области. Взвешивание в уравнении (9) аналогично нормально-взвешенному среднеквадратичному усреднению, например, в одномерном случае, когда весовые коэффициенты пропорциональны 1/σ2. С использованием уравнения (9), меньшим ожидаемым областям (т.е. областям с меньшей неопределенностью) присваиваются более высокие весовые коэффициенты, чем более крупным ожидаемым областям.
для -й ожидаемой области обратно пропорционален квадрату ГООМ этой ожидаемой области. Взвешивание в уравнении (9) аналогично нормально-взвешенному среднеквадратичному усреднению, например, в одномерном случае, когда весовые коэффициенты пропорциональны 1/σ2. С использованием уравнения (9), меньшим ожидаемым областям (т.е. областям с меньшей неопределенностью) присваиваются более высокие весовые коэффициенты, чем более крупным ожидаемым областям.
Заметим, что весовые коэффициенты также можно выводить на основании некоторых других параметров или какой-либо комбинации параметров.
Комбинированная ожидаемая область имеет размер, указывающий неопределенность при использовании этой комбинированной ожидаемой области в качестве оценки местоположения терминала. Размер (или неопределенность) комбинированной ожидаемой области определяется на основании размеров (или неопределенностей) всех комбинируемых ожидаемых областей, весовых коэффициентов, используемых для комбинирования этих ожидаемых областей, некоторых других факторов или их комбинации.
Один фактор, который можно использовать для определения размера комбинированной ожидаемой области, связан с количеством комбинируемых измеренных БППС. Если считать измерения из БППС независимыми, то размер комбинированной ожидаемой области можно уменьшить в (например, квадратный корень из) количества комбинируемых БППС. Величину уменьшения размера комбинированной ожидаемой области можно ограничить на основании количества измеренных БППС. В порядке конкретного примера, можно препятствовать дальнейшему сокращению размера комбинированной ожидаемой области, даже если используется более 10 измеренных БППС.
Другой фактор для определения размера комбинированной ожидаемой области связан с наименьшим размером всех комбинируемых ожидаемых областей. Если измерения из БППС полезны для вывода более точной комбинированной ожидаемой области, имеется разумная "подгонка" между отдельными комбинируемыми ожидаемыми областями. В этом случае, размер комбинированной ожидаемой области не должен превышать наименьший размер всех отдельных комбинируемых ожидаемых областей. Каждая ожидаемая область может способствовать дальнейшему уменьшению размера комбинированной ожидаемой области.
Еще один фактор для определения размера комбинированной ожидаемой области связан с "единичной ошибкой", которая указывает, насколько отдельные ожидаемые области перекрывают комбинированную ожидаемую область. В случае "плохой" подгонки между измерениями (как показано ниже на фиг.7), размер комбинированной ожидаемой области в действительности может быть больше (или хуже), чем у наименьшей отдельной ожидаемой области. В этом случае, единичная ошибка будет больше 1,0, и размер комбинированной ожидаемой области можно будет увеличить путем умножения на единичную ошибку (что приведет к соответствующему увеличению ГООМ комбинированной ожидаемой области).
Единичную ошибку можно вычислить на основании нормализованного среднего "разделение-сигма" между комбинированной ожидаемой областью и каждой отдельной ожидаемой областью, используемой для определения комбинированной ожидаемой областью. В одной реализации, разделение-сигма σi для  -й ожидаемой области задано в виде:
-й ожидаемой области задано в виде:

где  - расстояние между центром комбинированной ожидаемой области и центром -й ожидаемой области, и КСК (RSS) - корень из суммы квадратов ГООМ -й ожидаемой области и ГООМ комбинированной ожидаемой области.
- расстояние между центром комбинированной ожидаемой области и центром -й ожидаемой области, и КСК (RSS) - корень из суммы квадратов ГООМ -й ожидаемой области и ГООМ комбинированной ожидаемой области.
Единичную ошибку  можно задать как:
можно задать как:

Из уравнения (12) следует, что единичная ошибка выражает стоимость по методу наименьших квадратов (МНК, LMS).
Если единичная ошибка, вычисленная для комбинированной ожидаемой области, больше единицы (т.е. >1,0), то размер комбинированной ожидаемой области можно увеличить путем умножения на единичную ошибку. Если же единичная ошибка меньше единицы (т.е. <1,0), то размер комбинированной ожидаемой области можно уменьшить путем умножения на единичную ошибку. Если единичная ошибка меньше единицы (т.е. <1,0), это может быть обусловлено корреляцией ожидаемых областей, а не завышенными размерами ожидаемых областей. В результате, часто предпочтительнее игнорировать значения  , которые меньше 1, чем уменьшать размер комбинированной ожидаемой области, как описано выше.
, которые меньше 1, чем уменьшать размер комбинированной ожидаемой области, как описано выше.
На фиг.7А показана схема, иллюстрирующая комбинирование двух перекрывающихся ожидаемых областей  и
и  для двух измеренных БППС на основании взвешенного среднего для определения комбинированной ожидаемой области 714p. Каждая из двух ожидаемых областей может быть либо не отрегулированной ожидаемой областью (т.е. с масштабным коэффициентом 1,0), либо отрегулированной ожидаемой областью, определенной на основании масштабного коэффициента
для двух измеренных БППС на основании взвешенного среднего для определения комбинированной ожидаемой области 714p. Каждая из двух ожидаемых областей может быть либо не отрегулированной ожидаемой областью (т.е. с масштабным коэффициентом 1,0), либо отрегулированной ожидаемой областью, определенной на основании масштабного коэффициента  , присвоенного БППС для ожидаемой области. Ожидаемая область для первой измеренной БППС имеет центр в местоположении 712m и размер/форму, представленные кругом 714m. Аналогично, ожидаемая область
, присвоенного БППС для ожидаемой области. Ожидаемая область для первой измеренной БППС имеет центр в местоположении 712m и размер/форму, представленные кругом 714m. Аналогично, ожидаемая область  для второй измеренной БППС имеет центр в местоположении 712n и размер/форму, представленные кругом 714n. Центры ожидаемых областей и заданы декартовыми координатами (
для второй измеренной БППС имеет центр в местоположении 712n и размер/форму, представленные кругом 714n. Центры ожидаемых областей и заданы декартовыми координатами ( ,
,  ) и (
) и ( ,
,  ), соответственно.
), соответственно.
Комбинированная ожидаемая область имеет центр в местоположении 712p и размер/форму, представленные кругом 714p. Центр комбинированной ожидаемой области имеет декартовы координаты ( ,
,  ), которые можно определить согласно уравнению (7). Графически, можно провести прямую линию между двумя центрами 712m и 712n ожидаемых областей. Благодаря взвешенному усреднению, центр комбинированной ожидаемой области находится на этой линии, причем точное местоположение определяется весовыми коэффициентами
), которые можно определить согласно уравнению (7). Графически, можно провести прямую линию между двумя центрами 712m и 712n ожидаемых областей. Благодаря взвешенному усреднению, центр комбинированной ожидаемой области находится на этой линии, причем точное местоположение определяется весовыми коэффициентами  и
и  , присвоенными ожидаемым областям
, присвоенными ожидаемым областям  и
и  , соответственно. В частности, если расстояние между двумя центрами 712m и 712n ожидаемых областей равно
, соответственно. В частности, если расстояние между двумя центрами 712m и 712n ожидаемых областей равно  , то расстояния
, то расстояния  и
и  между этими центрами 712m и 712n ожидаемых областей и центром 712p комбинированной ожидаемой области можно выразить следующим образом:
между этими центрами 712m и 712n ожидаемых областей и центром 712p комбинированной ожидаемой области можно выразить следующим образом:

где  .
.
В примере, показанном на фиг.7А, имеется разумная подгонка между двумя комбинируемыми ожидаемыми областями. Таким образом, размер (и неопределенность) комбинированной ожидаемой области уменьшается в соответствии с (1) количеством комбинируемых измеренных БППС, которое в данном примере равно двум, и (2) меньшим размером из двух комбинируемых ожидаемых областей, который является размером ожидаемой области  .
.
На фиг.7В показана схема, иллюстрирующая комбинирование двух не перекрывающихся ожидаемых областей и на основании взвешенного среднего для вывода комбинированной ожидаемой области 714q. Две ожидаемые области имеют центры в местоположениях 712m и 712n, которые соответственно заданы декартовыми координатами (, ) и ( , ). Размеры и формы этих двух ожидаемых областей представлены кругами 714m и 714n.
, ). Размеры и формы этих двух ожидаемых областей представлены кругами 714m и 714n.
Комбинированная ожидаемая область имеет центр в местоположении 712q с декартовыми координатами ( ,
,  ), которые можно определить согласно уравнению (7). Размер/форма комбинированной ожидаемой области представлена кругом 714q. В примере, показанном на фиг.7В, две комбинированные ожидаемые области и не перекрываются, и единичная ошибка определяется превышающей единицу (т.е.
), которые можно определить согласно уравнению (7). Размер/форма комбинированной ожидаемой области представлена кругом 714q. В примере, показанном на фиг.7В, две комбинированные ожидаемые области и не перекрываются, и единичная ошибка определяется превышающей единицу (т.е.  >1,0). В этом случае, размер комбинированной ожидаемой области увеличивается путем умножения на единичную ошибку. Тогда комбинированная ожидаемая область будет иметь размер, больший, чем у меньшей из двух комбинируемых ожидаемых областей, что графически представлено на фиг.7B.
>1,0). В этом случае, размер комбинированной ожидаемой области увеличивается путем умножения на единичную ошибку. Тогда комбинированная ожидаемая область будет иметь размер, больший, чем у меньшей из двух комбинируемых ожидаемых областей, что графически представлено на фиг.7B.
На фиг.8 показана логическая блок-схема процесса 800 для более точной оценки приближенного местоположения терминала с использованием определения местоположения на основе области. Первоначально, для каждой БППС определяют ожидаемую область, которую можно использовать для позиционного определения местоположения (этап 812). Ожидаемую область можно определить на основании максимальной дальности антенны БППС и/или некоторых других параметров, согласно описанному выше. Затем, ожидаемые области для БППС можно сохранить в блоке хранения, например, в "альманахе" базовой станции. Ожидаемые области обычно определяют один раз, например, при развертывании сети. Затем, при необходимости, из блока хранения можно получить ожидаемые области, что указано пунктирным прямоугольником для этапа 812.
Для каждой позиционной оценки местоположения, сначала поступает указание, что сигналы от нескольких БППС приняты в терминале (этап 814). Затем, из всех принятых БППС выявляется множество измеренных БППС (этап 816). Измеренные БППС - это БППС, которые можно использовать для оценки приближенного местоположения терминала. Затем определяется (например, извлекается из памяти) ожидаемая область, связанная с каждой измеренной БППС, которую можно регулировать для определения отрегулированной ожидаемой области, связанной с БППС (этап 818). Регулировку ожидаемой области, связанной с каждой измеренной БППС, можно осуществлять на основании масштабного коэффициента, присвоенного этой БППС. Этот масштабный коэффициент, в свою очередь, можно определить на основании уровня принятого сигнала и/или какого-либо другого фактора, согласно описанному выше. Регулировку для любой БППС также можно отменить, задав масштабный коэффициент для БППС равным единице ( =1,0).
=1,0).
Отрегулированные и/или не отрегулированные ожидаемые области для всех измеренных БППС комбинируют для определения комбинированной ожидаемой области, которую можно обеспечить как приближенную оценку местоположения терминала (этап 820). Центр ожидаемой области представляет оценочное местоположение терминала, а размер ожидаемой области представляет достоверность оценочного местоположения. Например, если обеспечена круглая комбинированная ожидаемая область 1-сигма, вероятность того, что терминал находится в комбинированной ожидаемой области, равна 39 процентов. Комбинирование ожидаемых областей можно производить согласно описанному выше.
Позиционную оценку на основании комбинированной ожидаемой области можно также объединить с какой-либо другой имеющейся оценкой местоположения терминала (этап 822). Это другое местоположение можно оценивать на основании некоторых других типов измерений, например, ГСП, УТПЛ, или совместно ГСП и УТПЛ. Местоположение ГСП оценивается с помощью спутников ГСП и обычно имеет наивысшую возможную точность, но может быть недоступно в определенных условиях (например, в некоторых помещениях). Местоположение УТПЛ оценивается на основании измерений системы беспроводной связи и имеет меньшую точность. Однако оценка местоположения УТПЛ общедоступна в городских условиях и в других местах, где ГСП может быть недоступна. Смешанное местоположение можно оценивать на основании измерений ГСП и системы беспроводной связи. Этап 822 является необязательным и обозначен пунктирным прямоугольником.
Этапы 816-822 могут осуществляться в терминале, БППС, ООМ, или каком-либо другом сетевом объекте.
Следует понимать, что на основании описанных здесь принципов можно предложить вариации и модификации вышеописанных вариантов осуществления. Кроме того, можно также вывести альтернативные варианты осуществления описанных здесь способа и устройства. Ниже описаны некоторые альтернативные варианты осуществления.
Согласно одному альтернативному варианту осуществления, ожидаемая область, связанная с БППС, регулируется на основании (1) принимаемой мощности,  , которая является мощностью, принимаемой в терминале для БППС, и (2) прогнозируемой мощности,
, которая является мощностью, принимаемой в терминале для БППС, и (2) прогнозируемой мощности,  , которая является мощностью, которую, согласно прогнозу, должен принимать терминал для этой БППС.
, которая является мощностью, которую, согласно прогнозу, должен принимать терминал для этой БППС.
Прогнозируемую мощность, , можно вычислять на основании модели прогнозирования потерь в тракте и набора параметров. Для вычисления прогнозируемой мощности можно использовать различные модели прогнозирования потерь в тракте, например, модель Окумура-Хаты. Прогнозируемую мощность, , в терминале для данной БППС можно выразить как функцию этих параметров следующим образом:

где  - мощность на антенном порту БППС (до антенного усилителя),
- мощность на антенном порту БППС (до антенного усилителя),
 - коэффициент усиления антенны БППС,
- коэффициент усиления антенны БППС,
 - обозначение модели распространения (например, Окумура-Хаты),
- обозначение модели распространения (например, Окумура-Хаты),
 - база данных рельефа, которая содержит информацию неровности рельефа для прогнозирования потерь в такте,
- база данных рельефа, которая содержит информацию неровности рельефа для прогнозирования потерь в такте,
 - база данных наземного покрытия/наземного использования, которая содержит информацию о регионе, в котором пролегает маршрут распространения, как то густонаселенные городские кварталы, сельская местность, водная поверхность и т.д.,
- база данных наземного покрытия/наземного использования, которая содержит информацию о регионе, в котором пролегает маршрут распространения, как то густонаселенные городские кварталы, сельская местность, водная поверхность и т.д.,
 - потенциальное местоположение терминала (прогнозируемая мощность вычисляется из предположения, что терминал находится в местоположении ) и
- потенциальное местоположение терминала (прогнозируемая мощность вычисляется из предположения, что терминал находится в местоположении ) и
 - функция всех параметров, которые используются в качестве аргументов.
- функция всех параметров, которые используются в качестве аргументов.
Параметры и можно комбинировать для обеспечения входной мощности для модели прогнозирования потерь на трассе.
Согласно уравнению (14), прогнозируемая мощность, , является функцией потенциального местоположения терминала. Если центр ожидаемой области используется в качестве потенциального местоположения , то центр ожидаемой области можно регулировать так, чтобы минимизировать разность между прогнозируемой мощностью и принимаемой мощностью. Этот критерий можно выразить следующим образом:

где { } представляет множество всех возможных местоположений, допустимых для центра ожидаемой области.
} представляет множество всех возможных местоположений, допустимых для центра ожидаемой области.
Затем, отрегулированную ожидаемую область, связанную с этой БППС, можно обеспечить как позиционную оценку для терминала. Альтернативно, эту отрегулированную ожидаемую область можно комбинировать с отрегулированными и/или не отрегулированными ожидаемыми областями для других измеренных БППС, чтобы определить комбинированную ожидаемую область, которую затем можно обеспечить в качестве позиционной оценки для терминала.
Согласно другому альтернативному варианту осуществления, ожидаемые области для многочисленных измеренных БППС можно регулировать и комбинировать на основании принимаемой мощности и прогнозируемой мощности для каждой из этих БППС. Если центр комбинированной ожидаемой области используется как потенциальное местоположение  терминала, то центр комбинированной ожидаемой области можно отрегулировать так, чтобы среднеквадратическая разность между прогнозируемыми мощностями и принимаемыми мощностями для измеренных БППС была минимальна. Этот критерий можно выразить следующим образом:
терминала, то центр комбинированной ожидаемой области можно отрегулировать так, чтобы среднеквадратическая разность между прогнозируемыми мощностями и принимаемыми мощностями для измеренных БППС была минимальна. Этот критерий можно выразить следующим образом:

где {} представляет множество всех возможных местоположений, допустимых для центра ожидаемой области, и { } представляет множество всех измеренных БППС. Конкретное местоположение для использования в качестве центра комбинированной ожидаемой области и, таким образом, оценочного местоположения терминала соответствует минимальному значению выражения в уравнении (16). Этот вариант осуществления предусматривает альтернативный способ регулировки и комбинирования ожидаемых областей для измеренных БППС.
} представляет множество всех измеренных БППС. Конкретное местоположение для использования в качестве центра комбинированной ожидаемой области и, таким образом, оценочного местоположения терминала соответствует минимальному значению выражения в уравнении (16). Этот вариант осуществления предусматривает альтернативный способ регулировки и комбинирования ожидаемых областей для измеренных БППС.
На фиг.9 показана упрощенная блок-схема различных элементов сети 100. В качестве терминала 106х может выступать сотовый телефон, компьютер с беспроводным модемом, отдельный блок определения местоположения или какой-нибудь другой блок. Показано, что БППС 105х оперативно подключена к ООМ 130x (например, через КБС 120, который, для простоты, не показан на фиг.9).
На прямой линии связи, данные, пилот-сигнал и сигнализация, подлежащие передаче с БППС 105х, обрабатываются (например, кодируются, модулируются, фильтруются, усиливаются, квадратурно модулируются и преобразуются с повышением частоты) модулятором/передатчиком (мод/перед) 920 для обеспечения модулированного сигнала прямой линии связи, который затем передается через антенну 922 в терминалы в области покрытия БППС. Терминал 106x принимает модулированные сигналы прямой линии связи от ряда БППС (включая БППС 105x) на антенну 952, и принятый сигнал маршрутизируется на приемник/демодулятор (пр/демод) 954. Затем пр/демод 954 обрабатывает принятый сигнал в обратном порядке для обеспечения различных типов информации, которую можно использовать для определения местоположения. В частности, пр/демод 954 может предоставлять идентификацию и уровень принятого сигнала (или принимаемую мощность) каждой принятой БППС процессору 960. Пр/демод 954 может реализовать многоотводный приемник, который способен одновременно обрабатывать многочисленные экземпляры сигнала (или компоненты многолучевого сигнала) в принятом сигнале для нескольких принятых БППС. Многоотводный приемник содержит несколько отводных процессоров (отводов), каждый из которых может быть назначен для обработки или отслеживания конкретного компонента многолучевого сигнала.
На обратной линии связи, связи, данные, пилот-сигнал и/или сигнализация, подлежащие передаче с терминала 106x, обрабатываются модулятором/передатчиком (мод/перед) 964 для обеспечения модулированного сигнала обратной линии связи. Затем модулированный сигнал обратной линии связи передается через антенну 952 на БППС. БППС 105x принимает модулированный сигнал обратной линии связи от терминала 106x на антенну 922. Затем принятый сигнал маршрутизируется на приемник/демодулятор (пр/демод) 924. Пр/демод 924 обрабатывает принятый сигнал в обратном порядке для обеспечения различных типов информации, которая затем может предоставляться процессору 910.
Согласно варианту осуществления, представленному на фиг.9, связной порт 914 в БППС 105х оперативно подключен (например, через контроллер базовой станции) к связному порту 944 в ООМ 130x. Связные порты 914 и 944 позволяют БППС 105x и ООМ 130x обмениваться полезной информацией для определения местоположения (которая может быть принята от терминала 106х).
Приближенную оценку местоположения терминала можно вычислять с использованием определения местоположения на основе области на терминале 106x, БППС 105x, ООМ 130x, или каком-либо другом сетевом объекте. Объект, производящий определение местоположения на основе области, снабжается полезной информацией, необходимой для вывода приближенной оценки местоположения. Такая информация может включать в себя, например, идентификаторы (например, ИД базовой станции) для измеренных БППС, подлежащие использованию для определения комбинированной ожидаемой области, ожидаемой области (например, центра, размера и формы) для каждой измеренной БППС, уровень принятого сигнала или принимаемой мощности для каждой измеренной БППС и т.д. Часть этой информации можно получить из "альманаха" базовой станции. Альманах может включать в себя различные типы информации, например: (1) идентификацию каждой БППС, (2) местоположение центра сектора БППС, (3) максимальную дальность антенны, (4) ориентацию антенны и т.д. Затем указанный сетевой объект выводит комбинированную ожидаемую область. Комбинированную ожидаемую область можно обеспечить как приближенную оценку местоположения терминала.
Обработку для оценки определения местоположения терминала может осуществлять процессор 960 в терминале 106x, процессор 910 в БППС 105x или процессор 940 в ООМ 130x. Блоки памяти 962, 912 и 942 можно использовать для хранения различных типов информации, используемой для определения местоположения, например, "альманаха" базовой станции, уровня принятых сигналов или принимаемых мощностей и т.д. В блоках памяти 962, 912 и 942 также могут храниться программные коды и данные для процессоров 960, 910 и 940, соответственно.
Описанные здесь способ и устройство можно использовать для обеспечения более точной приближенной оценки местоположения терминала, который поддерживает связь с и/или может принимать сигналы от многочисленных БППС, без необходимости полного решения на основании времени поступления сигнала (ВП, TOA) или разности времен поступления (РВП, TDOA). Комбинируя ожидаемые области для многочисленных измеренных БППС, можно оценить местоположение терминала в два-три раза точнее, чем позволяет традиционная оценка местоположения на основании области покрытия для единичной (например, опорной) БППС. В одном конкретном испытании, проведенном в городских условиях, было обнаружено, что ошибка решения ожидаемой области обычно составляет 1-2 километра, тогда как ошибка решения комбинированной ожидаемой области обычно составляет 250-50 метров, что является существенным повышением точности.
Приближенную оценку местоположения, выведенную с использованием определения местоположения на основе области, можно использовать в качестве первоначальной оценки местоположения терминала. Например, эта первоначальная оценка местоположения может понадобиться для обеспечения вспомогательной информации, используемой для осуществления дальностной оценки местоположения. Первоначальную оценку местоположения также можно использовать для сокращения времени, необходимого для вывода дальностной оценки местоположения, что желательно. Приближенную оценку местоположения также можно использовать в качестве окончательной оценки местоположения терминала. Эту окончательную оценку местоположения можно обеспечивать, например, если решение дальностного местоположения не приводит к успеху или менее точно, чем позиционное решение. В качестве окончательной оценки местоположения крайне желательно обеспечивать как можно более точную позиционную оценку местоположения.
Описанные здесь способ и устройство можно реализовать различными средствами, например, аппаратными, программными или комбинированными. Для аппаратной реализации, описанные здесь способ и устройство могут быть реализованы в одной или нескольких специализированных интегральных схемах (СИС), цифровых сигнальных процессорах (ЦСП), устройствах обработки цифрового сигнала (УОЦС), программируемых логических устройствах (ПЛУ), программируемых пользователем вентильных матрицах (ППВМ), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, предназначенных для осуществления описанных здесь функций, или их комбинациях.
Для программной реализации, описанный здесь способ может быть реализован посредством модулей (например, процедур, функций и т.д.), которые осуществляют описанные здесь функции. Программные коды могут храниться в блоке памяти (например, памяти 962, 912 или 942, показанной на фиг.9) и выполняться процессором (например, процессором 960, 910 или 940). Блок памяти может быть реализован в процессоре или вне процессора, в этом случае он может быть подключен с возможностью передачи данных в процессор различными средствами, известными в данной области техники.
Вышеприведенное описание раскрытых вариантов осуществления призвано помочь специалистам в данной области техники применить или использовать настоящее изобретение. Таким образом, настоящее изобретение не предполагается ограниченным показанными здесь вариантами осуществления. Напротив, изобретение должно ограничиваться только ограничениями, выраженными в прилагаемой формуле изобретения.
Предложен способ оценки местоположения беспроводного терминала. Технический результат заключается в повышении точности определения местоположения. Согласно способу первоначально принимают идентификаторы ряда передатчиков, подлежащих использованию для оценки местоположения. Затем определяют ожидаемые области для этих передатчиков. Ожидаемая область, связанная с каждым передатчиком, указывает область, в которой, вероятно, находится терминал, при условии, что терминал принимает сигнал от передатчика. Каждая ожидаемая область может содержать местоположение (например, центр ожидаемой области), подлежащее использованию в качестве оценочного местоположения терминала, и неопределенность (или оценку погрешности), связанную с этим оценочным местоположением. Затем ожидаемые области для передатчиков комбинируют (например, на основании взвешенного среднего), чтобы определить комбинированную ожидаемую область, которая затем обеспечивается как оценка местоположения терминала. 11 н. и 26 з.п. ф-лы, 12 ил.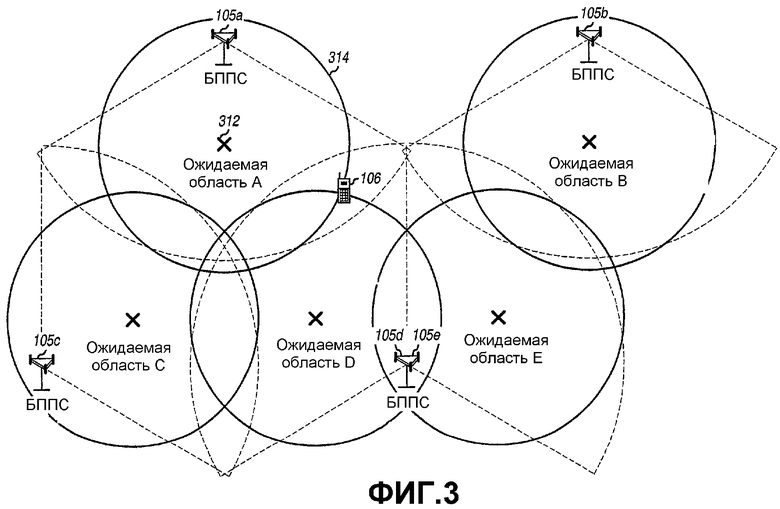
1. Способ оценки местоположения беспроводного терминала, заключающийся в том, что
принимают идентификаторы совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
определяют совокупность ожидаемых областей для совокупности передатчиков,
регулируют ожидаемую область, связанную с каждым передатчиком, на основании, по меньшей мере, одного присвоенного масштабного коэффициента, чтобы определить отрегулированную ожидаемую область, связанную с передатчиком, и
комбинируют совокупность ожидаемых областей для совокупности передатчиков, чтобы оценить местоположение терминала.
2. Способ по п.1, в котором упомянутая оценка местоположения дополнительно содержит неопределенность оценочного местоположения.
3. Способ по п.2, в котором неопределенность обеспечивают посредством области, в которой, вероятно, находится терминал.
4. Способ по п.1, в котором дополнительно комбинируют упомянутую оценку местоположения со второй оценкой местоположения, чтобы оценить окончательное местоположение терминала.
5. Способ по п.1, в котором ожидаемая область, связанная с каждым передатчиком, содержит оценочное местоположение терминала и область, в которой, вероятно, находится терминал.
6. Способ по п.1, в котором на этапе регулировки ожидаемой области, связанной с каждым передатчиком, перемещают центр ожидаемой области на основании первого присвоенного масштабного коэффициента.
7. Способ по п.6, в котором на этапе регулировки ожидаемой области, связанной с каждым передатчиком, дополнительно изменяют размер ожидаемой области на основании первого присвоенного масштабного коэффициента.
8. Способ по п.1, в котором на этапе регулировки ожидаемой области, связанной с каждым передатчиком, дополнительно изменяют размер ожидаемой области на основании первого присвоенного масштабного коэффициента и перемещают центр ожидаемой области на основании второго присвоенного масштабного коэффициента.
9. Способ по п.1, в котором на этапе регулировки ожидаемой области, связанной с каждым передатчиком, перемещают центр ожидаемой области на основании прогнозируемой мощности и принимаемой мощности передатчика.
10. Способ по п.9, в котором прогнозируемую мощность определяют на основании модели прогнозирования потерь в тракте.
11. Способ по п.1, в котором, по меньшей мере, один масштабный коэффициент для каждого передатчика определяют на основании уровня принятого сигнала передатчика, измеренного в терминале.
12. Способ по п.1, в котором, по меньшей мере, один масштабный коэффициент для каждого передатчика определяют на основании принимаемой мощности передатчика, измеренной в терминале.
13. Способ по п.1, в котором, по меньшей мере, один масштабный коэффициент для каждого передатчика определяют на основании мощности передачи передатчика.
14. Способ по п.1, в котором, по меньшей мере, один масштабный коэффициент для каждого передатчика определяют на основании измерения двусторонней задержки (ДСЗ), произведенного в передатчике.
15. Способ по п.1, в котором совокупность ожидаемых областей комбинируют для определения комбинированной ожидаемой области, которую обеспечивают как оценку местоположения терминала.
16. Способ по п.15, в котором на этапе комбинирования совокупности ожидаемых областей комбинируют центры совокупности ожидаемых областей для определения центра комбинированной ожидаемой области.
17. Способ по п.1, в котором ожидаемую область, связанную с каждым передатчиком, определяют на основании максимальной дальности антенны, связанной с передатчиком.
18. Способ по п.1, в котором ожидаемую область, связанную с каждым передатчиком, определяют на основании местоположения и ориентации антенны передатчика.
19. Способ по п.1, в котором ожидаемая область, связанная с каждым передатчиком, содержит местоположение, подлежащее использованию в качестве оценочного местоположения терминала, и область, в которой, вероятно, находится терминал.
20. Способ оценки местоположения беспроводного терминала, заключающийся в том, что
принимают идентификаторы совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
определяют совокупность ожидаемых областей для совокупности передатчиков, и комбинируют совокупность ожидаемых областей для совокупности передатчиков, чтобы оценить местоположение терминала,
причем совокупность ожидаемых областей комбинируют для определения комбинированной ожидаемой области, которую обеспечивают как оценку местоположения терминала,
при этом на этапе комбинирования совокупности ожидаемых областей комбинируют центры совокупности ожидаемых областей на основании прогнозируемой мощности и принимаемой мощности каждого передатчика для определения центра комбинированной ожидаемой области.
21. Способ по п.20, в котором центр комбинированной ожидаемой области определяют так, чтобы среднеквадратическая разность между прогнозируемыми мощностями и принимаемыми мощностями для совокупности передатчиков была минимальна.
22. Способ оценки местоположения беспроводного терминала, заключающийся в том, что
принимают идентификаторы совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
определяют совокупность ожидаемых областей для совокупности передатчиков, и
комбинируют совокупность ожидаемых областей для совокупности передатчиков, чтобы оценить местоположение терминала,
причем совокупность ожидаемых областей комбинируют для определения комбинированной ожидаемой области, которую обеспечивают как оценку местоположения терминала,
при этом на этапе комбинирования совокупности ожидаемых областей определяют единичную ошибку для комбинированной ожидаемой области и масштабируют комбинированную ожидаемую область на основании единичной ошибки.
23. Способ по п.22, в котором единичную ошибку определяют на основании нормализованного среднего разделения-сигма между комбинированной ожидаемой областью и каждой из совокупности ожидаемых областей.
24. Способ оценки местоположения беспроводного терминала, заключающийся в том, что
принимают идентификаторы совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
определяют совокупность ожидаемых областей для совокупности передатчиков, и
комбинируют совокупность ожидаемых областей для совокупности передатчиков, чтобы оценить местоположение терминала,
причем на этапе комбинирования совокупности ожидаемых областей определяют совокупность весовых коэффициентов для совокупности ожидаемых областей, и совокупность ожидаемых областей комбинируют на основании совокупности весовых коэффициентов.
25. Способ по п.24, в котором весовой коэффициент для каждой ожидаемой области определяют на основании неопределенности, связанной с ожидаемой областью.
26. Способ по п.25, в котором неопределенность, связанную с каждой ожидаемой областью, выражают как горизонтальную ошибку оценочного местоположения (ГООМ).
27. Способ оценки местоположения беспроводного терминала, заключающийся в том, что
принимают идентификаторы совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
определяют совокупность ожидаемых областей для совокупности передатчиков, и
комбинируют совокупность ожидаемых областей для совокупности передатчиков, чтобы оценить местоположение терминала,
причем на этапе комбинирования совокупности ожидаемых областей
определяют совокупность весовых коэффициентов для совокупности ожидаемых областей,
масштабируют совокупность ожидаемых областей на основании соответствующих весовых коэффициентов,
комбинируют масштабированные ожидаемые области для определения комбинированной ожидаемой области,
масштабируют центры совокупности ожидаемых областей на основании соответствующих весовых коэффициентов,
комбинируют масштабированные центры совокупности ожидаемых областей для определения центра комбинированной ожидаемой области, и комбинированную ожидаемую область и центр комбинированной ожидаемой области обеспечивают как оценку местоположения терминала.
28. Способ оценки местоположения терминала в сети беспроводной связи, заключающийся в том, что
принимают идентификаторы совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
определяют ожидаемую область и масштабный коэффициент для каждого из совокупности передатчиков,
регулируют каждую ожидаемую область на основании масштабного коэффициента для обеспечения совокупности отрегулированных ожидаемых областей,
определяют совокупность весовых коэффициентов для совокупности передатчиков, и
комбинируют совокупность отрегулированных ожидаемых областей на основании совокупности весовых коэффициентов, чтобы определить комбинированную ожидаемую область, подлежащую обеспечению в качестве оценочного местоположения терминала.
29. Способ по п.28, в котором масштабный коэффициент для каждого передатчика определяют на основании уровня принятого сигнала или принимаемой мощности передатчика, измеренных в терминале.
30. Способ по п.28, в котором масштабный коэффициент для каждой ожидаемой области определяют на основании неопределенности, связанной с ожидаемой областью.
31. Способ по п.28, в котором на этапе комбинирования совокупности отрегулированных ожидаемых областей
взвешивают центры совокупности отрегулированных ожидаемых областей на основании совокупности весовых коэффициентов для совокупности передатчиков,
комбинируют взвешенные центры отрегулированных ожидаемых областей для определения центра комбинированной ожидаемой области,
масштабируют совокупность отрегулированных ожидаемых областей на основании совокупности весовых коэффициентов для совокупности передатчиков и
комбинируют масштабированные отрегулированные ожидаемые области для определения комбинированной ожидаемой области.
32. Способ по п.28, в котором сеть беспроводной связи является сетью множественного доступа с кодовым разделением каналов (CDMA).
33. Устройство для оценки местоположения беспроводного терминала в сети беспроводной связи, содержащее
средство для приема идентификаторов совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
средство для определения совокупности ожидаемых областей для совокупности передатчиков,
средство для комбинирования совокупности ожидаемых областей для совокупности передатчиков для оценки местоположения терминала,
средство для взвешивания центров совокупности ожидаемых областей,
средство для комбинирования взвешенных центров ожидаемых областей для определения центра комбинированной ожидаемой области,
средство для масштабирования совокупности ожидаемых областей и
средство для комбинирования масштабированных ожидаемых областей для определения комбинированной ожидаемой области.
34. Устройство для оценки местоположения беспроводного терминала, содержащее
средство для приема идентификаторов совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
средство для определения совокупности ожидаемых областей для совокупности передатчиков,
средство для регулирования ожидаемой области, связанной с каждым передатчиком, на основании, по меньшей мере, одного присвоенного масштабного коэффициента, для определения отрегулированной ожидаемой области, связанной с передатчиком, и
средство для комбинирования совокупности ожидаемых областей для совокупности передатчиков для оценки местоположения терминала.
35. Устройство для оценки местоположения беспроводного терминала, содержащее
средство для приема идентификаторов совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
средство для определения совокупности ожидаемых областей для совокупности передатчиков, и
средство для комбинирования совокупности ожидаемых областей для совокупности передатчиков для оценки местоположения терминала,
причем совокупность ожидаемых областей комбинируют для определения комбинированной ожидаемой области, которую обеспечивают как оценку местоположения терминала,
при этом средство для комбинирования совокупности ожидаемых областей включает в себя средство для комбинирования центров совокупности ожидаемых областей на основании прогнозируемой мощности и принимаемой мощности каждого передатчика для определения центра комбинированной ожидаемой области.
36. Устройство для оценки местоположения беспроводного терминала, содержащее
средство для приема идентификаторов совокупности передатчиков, подлежащих использованию для оценки местоположения терминала,
средство для определения совокупности ожидаемых областей для совокупности передатчиков, и
средство для комбинирования совокупности ожидаемых областей для совокупности передатчиков для оценки местоположения терминала,
причем совокупность ожидаемых областей комбинируют для определения комбинированной ожидаемой области, которую обеспечивают как оценку местоположения терминала,
при этом комбинирование совокупности ожидаемых областей включает в себя определение единичной ошибки для комбинированной ожидаемой области и масштабирование комбинированной ожидаемой области на основании единичной ошибки.
37. Устройство для оценки местоположения беспроводного терминала, содержащее
средство для приема идентификаторов совокупности, передатчиков, подлежащих использованию для оценки местоположения терминала,
средство для определения совокупности ожидаемых областей для совокупности передатчиков, и
средство для комбинирования совокупности ожидаемых областей для совокупности передатчиков для оценки местоположения терминала,
причем средство для комбинирования совокупности ожидаемы, областей содержит
средство для определения совокупности весовых коэффициентов для совокупности ожидаемых областей,
средство для масштабирования совокупности ожидаемых областей на основании соответствующих весовых коэффициентов,
средство для комбинирования масштабированных ожидаемых областей для определения комбинированной ожидаемой области,
средство для масштабирования центров совокупности ожидаемых областей на основании соответствующих весовых коэффициентов, и средство для комбинирования масштабированных центров совокупности ожидаемых областей для определения центра комбинированной ожидаемой области, и при этом комбинированную ожидаемую область и центр комбинированной ожидаемой области обеспечивают как оценку местоположения терминала.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 1999 |
|
RU2157548C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ МЕХАНИЧЕСКОГО НАТЯЖЕНИЯ И СПУСКА ПРЕДВАРИТЕЛЬНО НАПРЯЖЕННОЙ АРМАТУРЫ | 0 |
|
SU251192A1 |
| СПОСОБ ПОЛУЧЕНИЯ БРИКЕТОВ И УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ БРИКЕТОВ | 2007 |
|
RU2364617C2 |
| WO 9642179 A1, 27.12.1996. | |||

