Настоящая заявка на патент испрашивает приоритет предварительной патентной заявки США №60/733,022, озаглавленной "КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ", поданной 2 ноября 2005 г., и также испрашивает приоритет заявки №11/398,077, озаглавленной "КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ", поданной 4 апреля 2006 г., переуступленных правопреемнику этой заявки и настоящим явно включенных в данный документ посредством ссылки.
I. Область техники
Последующее описание относится в целом к беспроводной связи и, среди прочего, к калибровке антенной решетки по радиоинтерфейсу.
II. Уровень техники изобретения
Системы беспроводной связи стали преобладающим средством, с помощью которого большинство людей по всему миру общаются друг с другом. Устройства беспроводной связи стали миниатюрнее и более мощными для того, чтобы удовлетворять потребительские нужды и чтобы улучшать портативность и удобство. Увеличение в мощности обработки в мобильных устройствах, например сотовых телефонах, привело к увеличению в требованиях по системам передачи в беспроводных сетях. Подобные системы типично не так легко обновляемы, как сотовые устройства, которые взаимодействуют в ней. Так как возможности мобильных устройств расширяются, может быть сложно поддерживать устаревшую систему беспроводных сетей способом, который обеспечивает полное использование новых и улучшенных возможностей беспроводных устройств.
Более конкретно методы на основе частотного разделения типично разделяют спектр на отдельные каналы путем их разделения на одинаковые участки ширины полосы, например частотный диапазон, назначенный для беспроводной сотовой телефонной связи, может быть разделен на каналы, каждый из которых может переносить речевой разговор или, в случае цифровой услуги, переносить цифровые данные. Каждый канал может быть назначен только одному пользователю в один момент времени. Одним общим используемым вариантом является метод ортогонального частотного разделения, который эффективно разбивает общий диапазон частот системы на множество ортогональных поднесущих. Эти поднесущие также упоминаются как тоны, несущие, элементы кодированного сигнала и/или частотные каналы. В методах на основе временного разделения диапазон делится во временном отношении на последовательные кванты времени или интервалы времени. Каждому пользователю канала может предоставляться квант времени для передачи и приема информации циклическим образом. Например, в любой заданный момент t времени пользователю предоставляется доступ к каналу на короткий интервал. Затем доступ переключается на другого пользователя, которому предоставляется короткий интервал времени для передачи и приема информации. Цикл "принятия перехода" продолжается и в конечном счете каждому пользователю предоставляется множество интервалов передачи и приема.
Методы на основе кодового разделения типично передают данные на множестве частот, доступных в любой момент времени в диапазоне. В общем, данные оцифровываются и распространяются по доступной ширине полосы, при этом множество пользователей могут занимать канал, и соответствующим пользователям может назначаться уникальный последовательный код. Пользователи могут передавать в том же самом широкополосном участке спектра, при этом сигнал каждого пользователя расширяется по всей ширине полосы с помощью своего соответствующего уникального кода расширения. Этот метод может предоставляться для совместного использования, при этом один или более пользователей могут одновременно передавать и принимать. Подобное совместное использование может достигаться с помощью цифровой модуляции расширенного спектра, при этом поток бит пользователя кодируется и расширяется по очень широкому каналу псевдослучайным образом. Приемник предназначается для распознавания ассоциированного уникального последовательного кода и отменяет рандомизацию, для того чтобы получать биты для конкретного пользователя когерентным способом.
Типичная сеть беспроводной связи (например, использующая методы частотного, временного и кодового разделений) включает в себя одну или более базовых станций, которые предоставляют зону покрытия, и один или более мобильных (например, беспроводных) терминалов, которые передают и принимают данные в зоне покрытия. Типичная базовая станция может одновременно передавать множество потоков для услуг широковещательной передачи, многоадресной передачи и/или одноадресной передачи, при этом поток данных является потоком данных, который может представлять независимый интерес при приеме на мобильный терминал. Мобильный терминал в зоне покрытия этой базовой станции может быть заинтересован в приеме одного, больше одного или всех потоков данных, передаваемых составным потоком. Аналогично мобильный терминал может передавать данные в базовую станцию или другой мобильный терминал. Подобная связь между базовой станцией и мобильным терминалом или между мобильными терминалами может ухудшаться из-за изменений канала и/или изменений мощности помех. Например, вышеупомянутые изменения могут влиять на планирование базовой станции, управление мощностью и/или прогнозирование скорости для одного или более мобильных терминалов.
Когда антенная решетка и/или базовые станции используются в сочетании с методом передачи канала TDD (дуплексный режим временной области), могут быть реализованы очень большие коэффициенты усиления. Ключевым предположением в реализации этих коэффициентов усиления является то, что из-за свойства передачи и приема TDD как прямая линия связи (FL), так и обратная линия связи (RL) наблюдают каналы аналогичного физического распространения, соответствующие общей частоте несущей. Однако на практике общие цепочки передачи и приема, которые могут включать в себя аналоговые внешние каскады и передатчики и приемники с цифровой дискретизацией, а также физическая прокладка кабелей и архитектура антенн, вносят вклад в общую характеристику канала, испытываемую приемником. Иными словами приемник воспринимает итоговый канал или эквивалентный канал между входом цифроаналогового преобразователя (DAC) передатчика и выходом аналого-цифрового преобразователя (ADC) приемника, который может содержать аналоговую цепочку передатчика, физический канал распространения, физическую структуру антенной решетки (включая прокладку кабелей) и аналоговую цепочку приемника.
С точки зрения, по меньшей мере, вышеизложенного, в технике существует потребность в системе и/или методологии калибровки в антенных решетках, используемых в устройствах беспроводной связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Последующее представляет упрощенную сущность изобретения одного или более вариантов осуществления, для того чтобы обеспечить базовое понимание подобных вариантов осуществления. Эта сущность изобретения не является обширным обзором, и оно не имеет намерением ни идентифицировать его ключевые или критические элементы всех его вариантов осуществления, ни установить границы объема каких-либо или всех его вариантов осуществления. Его единственная цель - представить некоторые понятия одного или более вариантов осуществления в упрощенной форме в качестве вступления к более подробному описанию, которое представлено далее.
Согласно одному аспекту способ калибровки антенной решетки в беспроводной сети содержит определение калибровки на основе, по меньшей мере, первого и второго методов калибровки и затем выбор, чтобы калибровать на основе одного из методов.
Согласно другому аспекту устройство беспроводной связи содержит, по меньшей мере, две антенны и процессор, соединенный с, по меньшей мере, двумя антеннами.
Процессор конфигурируется для определения калибровки для связи, включая, по меньшей мере, калибровку двух антенн на основе, по меньшей мере, первого и второго методов калибровки и затем выбор, чтобы калибровать на основе одного из методов.
Согласно еще одному аспекту устройство может содержать средство для определения калибровки на основе, по меньшей мере, первого и второго методов калибровки и затем выбор, чтобы калибровать на основе одного из методов.
Для достижения вышеизложенных и связанных целей один или более вариантов осуществления содержат признаки, описанные полностью в дальнейшем в данном документе и конкретно выделенные в формуле изобретения. Последующее описание и прилагаемые чертежи подробно излагают определенные иллюстративные аспекты одного или более вариантов осуществления. Эти аспекты, тем не менее, указывают только на некоторые из множества способов, в которых могут быть использованы принципы различных вариантов осуществления, и описанные варианты осуществления предназначены, чтобы включить в себя все подобные аспекты и их эквиваленты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 иллюстрирует аспекты системы беспроводной связи множественного доступа.
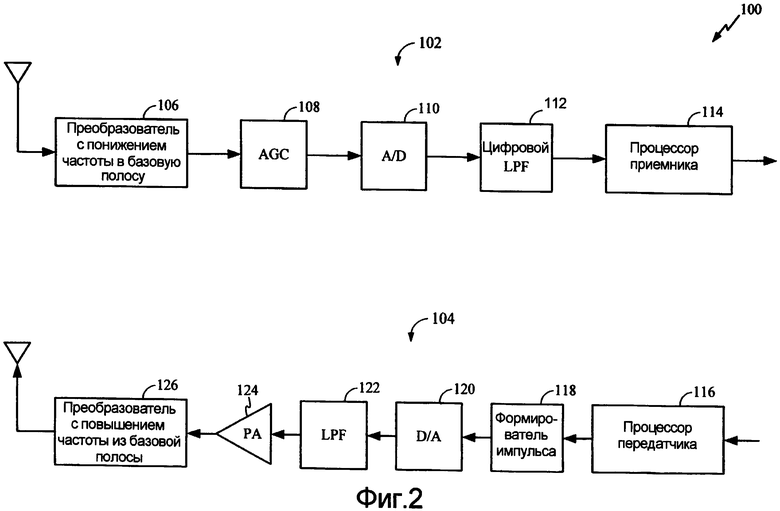
Фиг.2 иллюстрирует конфигурацию антенны, содержащей цепочку приемников и цепочку передатчиков согласно различным аспектам, описанным в данном документе.
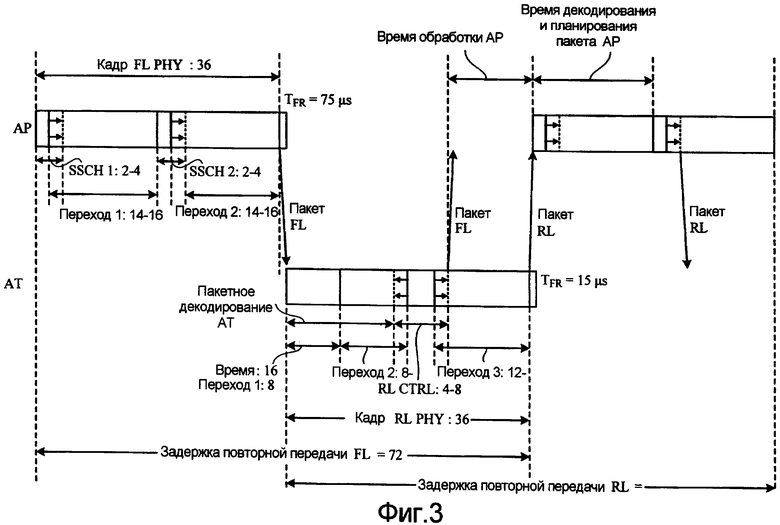
Фиг.3 иллюстрирует аспекты синхронизации для действий по калибровке.
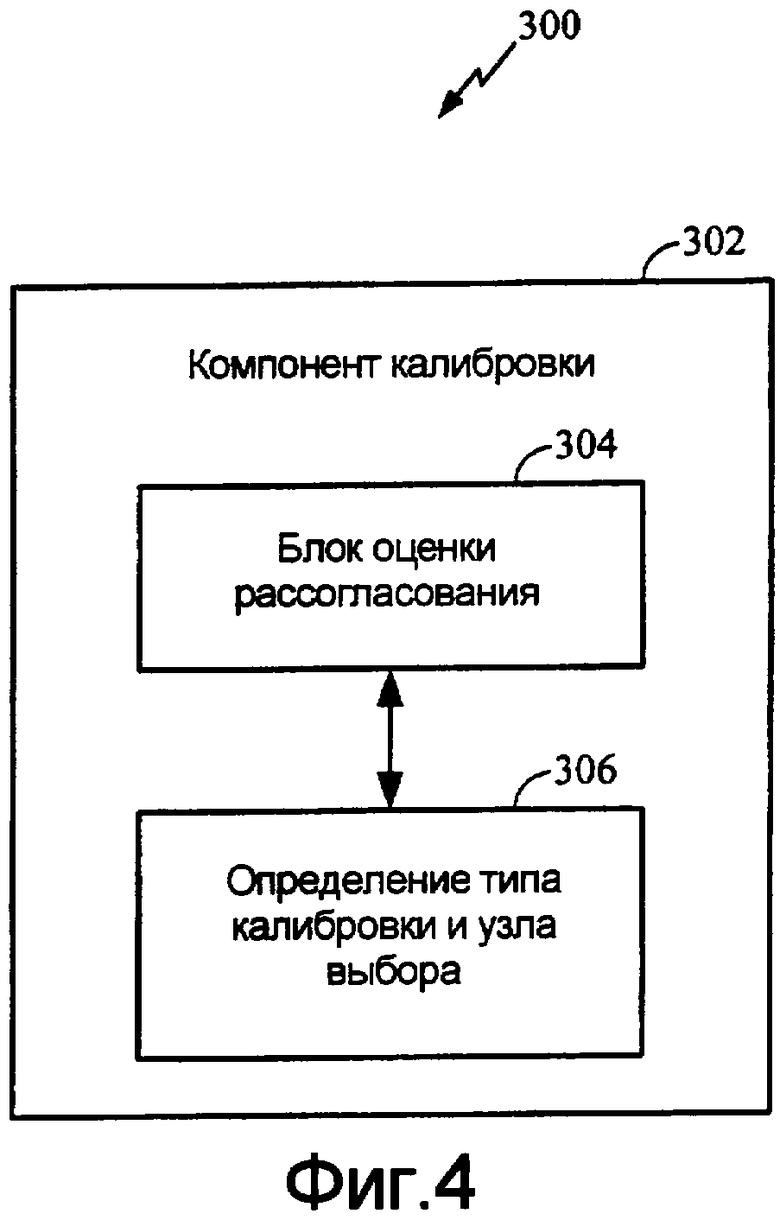
Фиг.4 иллюстрирует аспекты логики, которая способствует калибровке антенной решетки для компенсации рассогласований коэффициентов усиления.
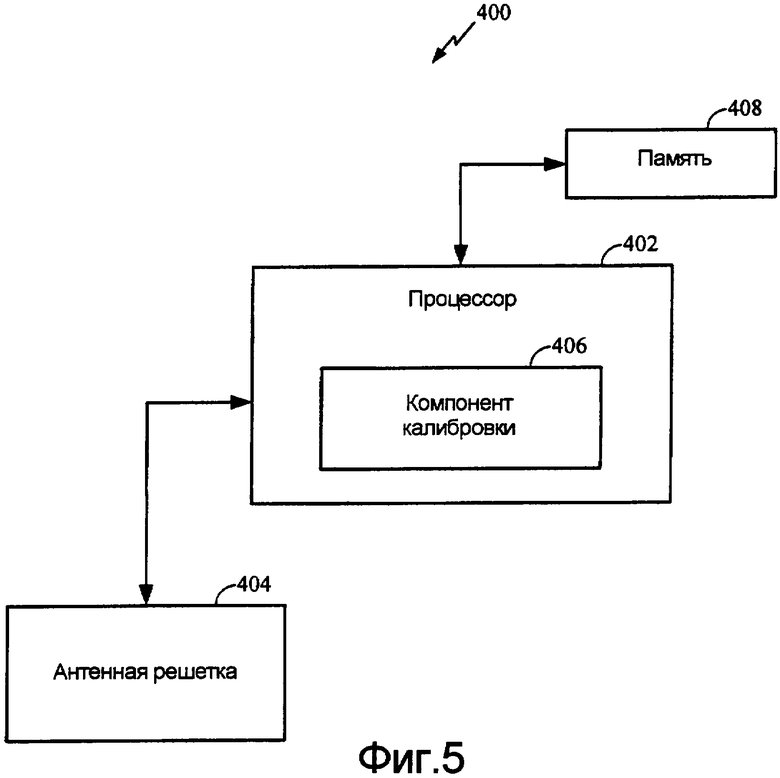
Фиг.5 иллюстрирует аспекты системы, которая способствует калибровке антенной решетки для компенсации рассогласований коэффициентов усиления.
Фиг.6 иллюстрирует аспекты методологии для калибровки решетки антенн.
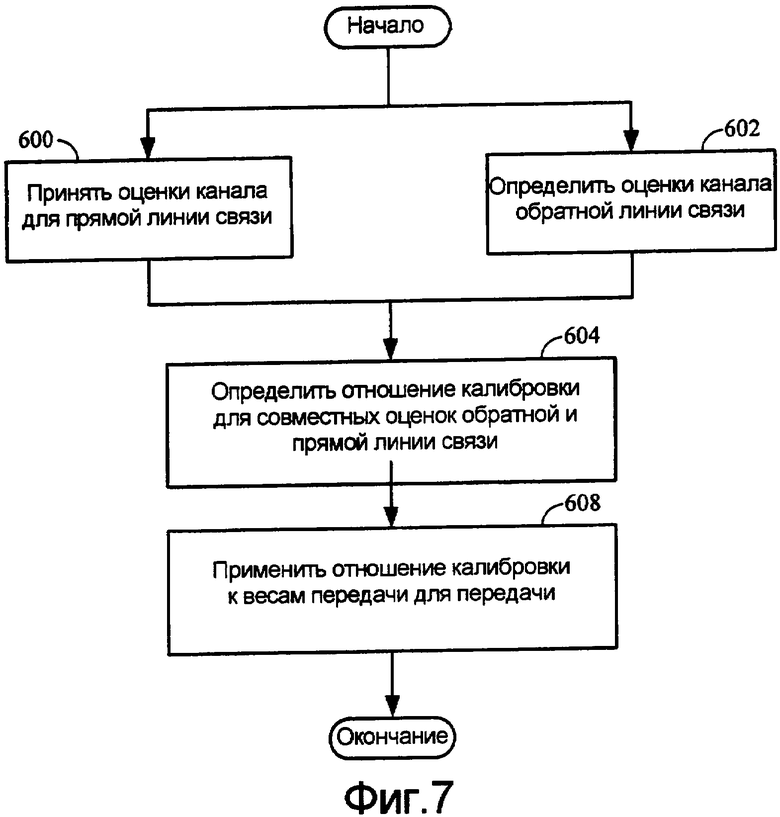
Фиг.7 иллюстрирует аспекты методологии для калибровки решетки антенн.
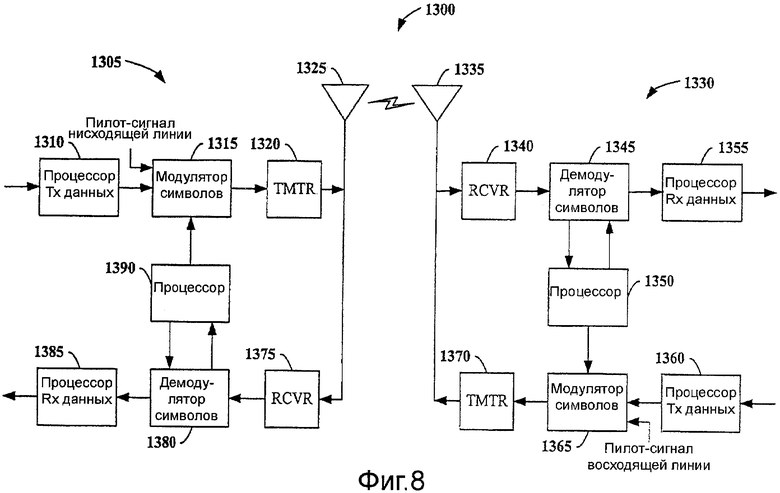
Фиг.8 иллюстрирует аспекты приемника и передатчика в системе беспроводной связи.
Фиг.9 иллюстрирует аспекты точки доступа.
Фиг.10 иллюстрирует аспекты методологии для определения типа калибровки для применения.
ПОДРОБНОЕ ОПИСАНИЕ
Ниже описаны различные варианты осуществления со ссылкой на чертежи, на которых одинаковые ссылочные номера использованы для указания одинаковых элементов. В последующем описании, для целей пояснения, многие конкретные детали объяснены, чтобы обеспечить полное понимание одного или более вариантов осуществления. Тем не менее, может быть очевидно, что подобные варианты осуществления могут быть реализованы на практике без этих конкретных деталей. В иных случаях в форме блок-схемы показаны хорошо известные структуры и устройства, чтобы облегчить описание одного или более вариантов осуществления.
Как использовано в этой заявке, термины "компонент", "система" и тому подобные предназначены для ссылки на компьютерный объект, либо на аппаратные средства, сочетание аппаратных средств и программного обеспечения, программное обеспечение или программное обеспечение при исполнении. Например, компонент может быть, но не ограничен, процессом, запущенным на процессоре, процессором, объектом, исполняемым файлом, потоком управления, программой и/или компьютером. Один или более компонентов могут находиться в пределах процесса и/или потока управления, и компонент может быть локализован на одном компьютере и/или распределен между двумя или более компьютерами. Также эти компоненты могут исполняться с различных машиночитаемых носителей, имеющих различные структуры данных, сохраненных на них. Компоненты могут осуществлять связь посредством локальных и/или удаленных процессов, например, в соответствии с сигналом, имеющим один или более пакетов данных (к примеру, данных из компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или по сети, например, по Интернету с другими системами, посредством сигнала).
Кроме того, различные варианты осуществления описаны в данном документе в связи с абонентской станцией. Абонентская станция может также называться системой, абонентским узлом, мобильной станцией, удаленной станцией, точкой доступа, базовой станцией, удаленным терминалом, терминалом доступа, пользовательским терминалом, агентом пользователя, пользовательским устройством, пользовательским оборудованием и т.д. Абонентская станция может быть сотовым телефоном, беспроводным телефоном, телефоном протокола инициации сеанса (SIP), станцией беспроводной абонентской линии (WLL), персональным цифровым помощником (PDA), портативным устройством с возможностью беспроводного соединения или другим обрабатывающим устройством, соединенным с беспроводным модемом.
Более того, различные аспекты или признаки, описанные в данном документе, могут быть реализованы как способ, устройство или изделие, использующее методы стандартного программирования и/или конструирования. Термин "изделие", как он используется в материалах настоящей заявки, имеет намерением охватывать компьютерную программу, доступную с любого машиночитаемого устройства, несущей или носителей. Например, машиночитаемая среда может включать в себя, но не в качестве ограничения, магнитные запоминающие устройства (например, жесткий диск, дискету, магнитные полосы…), оптические диски (например, компакт диск (CD), цифровой универсальный диск (DVD)…), интеллектуальные карты, и устройства флэш-памяти (например, карточку, карту памяти, переходный привод…) и интегральные микросхемы, например, постоянные запоминающие устройства, программируемые постоянные запоминающие устройства и электрически стираемые программируемые постоянные запоминающие устройства.
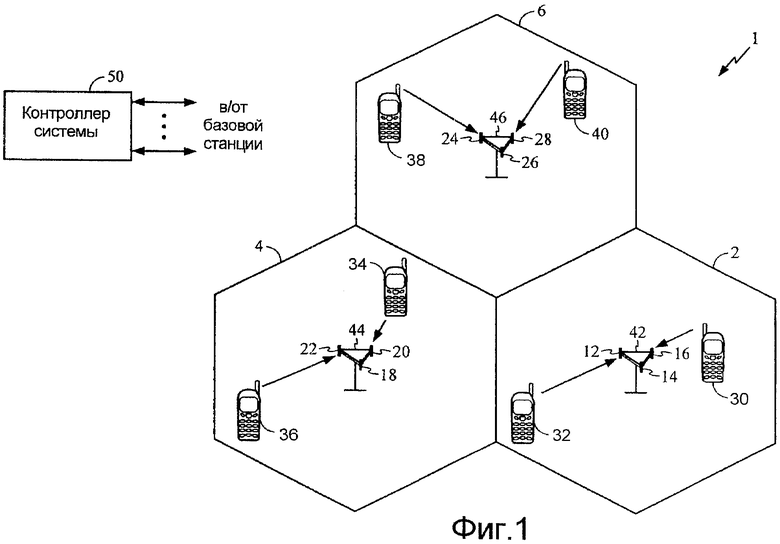
На фиг.1 проиллюстрирована система связи множественного доступа согласно одному варианту осуществления. Система 1 беспроводной связи множественного доступа включает в себя множество сот, например, соты 2. На фиг.1 каждая из сот 2, 4 и 6 может включать в себя точку доступа, которая включает в себя множество секторов. Множество секторов создается группами антенн, каждая отвечает за связь с терминалами доступа в части соты. В соте 2 каждая из групп 12, 14 и 16 антенн соответствуют различному сектору. В соте 4 каждая из групп 18, 20 и 22 антенн соответствуют различному сектору. В соте 6 каждая из групп 24, 26 и 28 антенн соответствуют различному сектору.
Каждая сота включает в себя несколько терминалов доступа, которые осуществляют связь с одним или более секторами каждой точки доступа. Например, терминалы 30 и 32 доступа осуществляют связь с базой 42 точки доступа, терминалы 34 и 36 осуществляют связь с точкой 44 доступа и терминалы 38 и 40 доступа осуществляют связь с точкой 46 доступа.
Контроллер 50 соединен с каждой из сот 2, 4 и 6. Контроллер 50 может содержать одно или более соединений с множеством сетей, например Интернет, другими сетями на основе коммутации пакетов или сетями связи с коммутацией каналов, которые предоставляют информацию к терминалам доступа и от терминалов доступа, осуществляющих связь с сотами системы 1 беспроводной связи множественного доступа. Контроллер 50 включает в себя или соединяется с планировщиком, который планирует передачу от/в терминалы доступа. В других вариантах осуществления планировщик может постоянно находиться в каждой отдельной соте, каждом секторе соты или их комбинации.
Для того чтобы облегчить калибровку передач в терминалы доступа, полезно калибровать цикл калибровки коэффициента усиления канала в точке доступа, чтобы устранять рассогласования из-за цепочек передачи и приема точки доступа. Однако из-за шума в канале любые оценки калибровки на основе сигналов, принятых в терминалах доступа по прямой линии связи и переданных от терминалов доступа по обратной линии связи, могут содержать шум и другие изменения канала, которые могут ставить под сомнение полученные оценки. Для того чтобы преодолеть эффекты шума канала, используются многочисленные калибровки как в прямой линии связи, так и в обратной линии связи для многочисленных терминалов доступа. В определенных аспектах многочисленные передачи в/от каждого терминала доступа принимаются во внимание для выполнения калибровки заданного сектора.
В определенных аспектах может калиброваться либо тракт передачи точки доступа, либо тракт приема точки доступа. Это может быть выполнено, например, с помощью использования отношения калибровки для того, чтобы калибровать тракт приема точки доступа для своего тракта передачи или калибровать свой тракт передачи для своего тракта приема.
Как используется в данном документе, точка доступа может быть фиксированной станцией, используемой для осуществления связи с терминалами, и может также упоминаться как и включать в себя некоторые или все из функциональных возможностей базовой станции, узла В или элемента, определенного какой-либо другой терминологией. Терминал доступа может также упоминаться как и включать в себя некоторые или все функциональные возможности пользовательского оборудования (UE), устройства беспроводной связи, терминала, мобильной станции или объекта, определенного какой-либо другой терминологией.
Следует заметить, что хотя фиг.1 отображает физические секторы, которые имеют различные группы антенн для различных секторов, могут использоваться другие подходы. Например, использование множества фиксированных "лучей", каждый из которых покрывает различные зоны соты в частотном пространстве, могут использоваться вместо или в комбинации с физическими секторами.
На фиг.2 описана конфигурация 100 антенны, содержащая тракт 102 приемника и тракт 104 передатчика согласно различным аспектам. Тракт 102 приемника содержит компонент 106 преобразования с понижением частоты, который преобразует сигнал с понижением частоты в базовую полосу при приеме. Компонент 106 преобразователя с понижением частоты оперативно соединен с функциональным средством 108 автоматической регулировки усиления (AGC), которое оценивает уровень принятого сигнала и автоматически регулирует усиление, применяемое к принятому сигналу для поддержания тракта 102 приемника в пределах своего ассоциированного линейного рабочего диапазона и для обеспечения постоянного уровня сигнала для вывода через тракт 104 передатчиков. Понятно, что средство AGC 108 может быть факультативным в некоторых вариантах осуществления, описанных в данном документе (например, автоматическую регулировку усиления не нужно осуществлять в связи с каждым вариантом осуществления). Средство AGC 108 оперативно соединено с аналогово-цифровым преобразователем 110 (A/D), который преобразует принятый сигнал в цифровой формат до того, как сигнал сглаживается с помощью цифрового фильтра 112 нижних частот (LPF), который может ослаблять краткосрочные колебания в принятом сигнале. Наконец, тракт 102 приемника может содержать процессор 114 приемника, который обрабатывает принятый сигнал и может передавать сигнал одному или более компонентам тракта 104 передатчика.
Тракт 104 передатчика может содержать процессор 116 передатчика, который принимает сигнал от тракта 102 приемника (например, передатчик принимает сигнал, который был исходно принят трактом 102 приемника и подвергался различным обработкам, ассоциируемым с его компонентами, …). Процессор 116 передатчика оперативно соединен с формирователем 118 импульсов, который может облегчать управление сигналом, который необходимо передать, так что сигнал может быть сформирован, чтобы находиться в пределах ограничений ширины полосы при снижении и/или устранении межсимвольных помех. Сформированный сигнал может подвергаться цифроаналоговому (D/A) преобразованию с помощью преобразователя 120 D/A перед подачей на оперативно соединенный фильтр 122 нижних частот (LPF) в тракте 104 передатчика для сглаживания. Компонент 124 усилителя импульсов (РА) может усиливать импульс/сигнал до преобразования с повышением частоты в базовую полосу с помощью преобразователя 126 с повышением частоты.
Антенная решетка 100 может существовать для каждой антенны как точки доступа, так и терминала доступа. Как таковое, может иметь место заметное различие, наблюдаемое между передаточными характеристиками тракта 104 передатчика и тракта 102 приемника и/или их выборками, обратимость эквивалентного канала и/или вариаций передатчика/приемника могут не предполагаться. При калибровке решетки антенн 100, понимание величины вариаций, в терминах воздействий на фазу и/или амплитуду сигналов, распространяющихся в трактах передатчика и приемника и их влияние на точность допущения об обратимости может использоваться, чтобы облегчить процесс калибровки. Кроме того, в случае антенной решетки, в общем каждая антенна 100 имеет отличающийся тракт 104 передатчика и тракт 102 приемника, относительно каждой другой антенны. Следовательно, каждый отличающийся тракт 104 передатчика может иметь различные эффекты, в терминах фазы и/или амплитуды, по сравнению с соответственно каким-либо иным трактом 104 передатчика. То же самое может быть истинным для трактов 102 приемника каждой антенны 100.
Рассогласования в эффектах могут быть обусловлены физической структурой антенны 100, различиями компонентов или рядом иных факторов. Подобные рассогласования могут включать в себя, например, эффекты взаимной связи, эффекты антенной мачты, неточное знание расположения элементов, неидентичности амплитуды и/или фазы из-за прокладки кабелей антенн и тому подобного. Кроме того, неидентичности могут быть обусловлены элементами аппаратного обеспечения в тракте 104 передатчика и/или тракте 102 приемника каждой антенны 100. Например, подобные неидентичности могут ассоциироваться с аналоговыми фильтрами, разбалансом I и Q, несоответствием фазы и/или усиления малошумящего усилителя или импульсного усилителя в трактах, различными эффектами нелинейности и т.д.
Для того чтобы калибровать каждый тракт передатчика для точки доступа для ее соответствующего тракта приема (т.е. тракта приемника, соответствующего той же самой антенне) независимо, потребуется сложная и потенциально объемная обработка. Кроме того, любая конкретная обратная связь для передачи по прямой линии связи или пилот-сигналы, используемые для передачи по обратной линии связи для любого заданного терминала доступа, подвергается действию шума для этого пользователя. Следовательно, для любого заданного отношения калибровки, оцениваемого на основе как прямой, так и обратной линии связи, существует некоторая ошибка, вносимая изменением канала и шумом. Следовательно, в некоторых аспектах одно или более отношений калибровки, оцениваемых для множества различных терминалов доступа, комбинируются для того, чтобы получить единственное отношение калибровки, которое необходимо использовать точкой доступа для передачи в один или все из терминалов доступа. В определенных аспектах комбинация может составлять среднее из всех отношений калибровки для каждого терминала доступа, взаимодействующего с точкой доступа или каким-либо заранее определенным пользователем. В другом аспекте комбинация может быть выполнена способом объединенной оптимизации, где измерения канала от и для каждого терминала доступа комбинируются для оценки единственного отношения калибровки, которое является комбинацией рассогласований усиления для каждого терминала доступа без вычисления отдельного отношения калибровки для каждого терминала доступа.
Для любого заданного терминала доступа точка доступа использует свои оценки обратной линии связи для этого терминала доступа, а также оценки прямой линии связи, которые выполняются в терминале доступа и передаются обратно в точку доступа для того, чтобы оценить или вычислить отношение калибровки на основе этого терминала доступа.
Оценка канала прямой линии связи  может оцениваться в терминале доступа для передачи от i-й передающей антенны точки доступа. Однако оценка канала имеет компоненты, связанные с шумом канала, наряду с любым коэффициентом усиления или коэффициентом искажения, вызываемого трактом передачи точек доступа и трактом приема терминалов доступа. Оценка канала прямой линии связи может быть затем записана как:
может оцениваться в терминале доступа для передачи от i-й передающей антенны точки доступа. Однако оценка канала имеет компоненты, связанные с шумом канала, наряду с любым коэффициентом усиления или коэффициентом искажения, вызываемого трактом передачи точек доступа и трактом приема терминалов доступа. Оценка канала прямой линии связи может быть затем записана как:
В уравнении 1 оценка канала является функцией рассогласования βAT усиления тракта приемника терминала доступа, рассогласования  усиления тракта передатчика точки доступа, физического канала hi между двумя измеряемыми антеннами и шум ni канала, который является частью оценки канала.
усиления тракта передатчика точки доступа, физического канала hi между двумя измеряемыми антеннами и шум ni канала, который является частью оценки канала.
В случае передач по обратной линии связи оценка канала в i-й приемной антенне точки доступа из-за передачи от терминала  доступа является, по существу, обратной уравнению 1. Это можно видеть в уравнении 2 ниже:
доступа является, по существу, обратной уравнению 1. Это можно видеть в уравнении 2 ниже:
В уравнении 2 эта оценка канала является функцией рассогласования αAT коэффициента усиления тракта передатчика терминала доступа, рассогласования  усиления тракта приемника точки доступа hi, являющегося физическим каналом между двумя измеряемыми антеннами, и шума vi канала, который является частью оценки канала.
усиления тракта приемника точки доступа hi, являющегося физическим каналом между двумя измеряемыми антеннами, и шума vi канала, который является частью оценки канала.
Для того чтобы калибровать антенную решетку, ошибки рассогласования между трактами 102 приемников и трактами 104 передатчиков антенн 100 в ней показаны ниже в уравнении 3. Следует заметить, что другие алгоритмы и математические зависимости могут использоваться для реализации калибровки решетки в сочетании или вместо алгоритмов и математических зависимостей, описанных в данном документе.
В уравнении 3 ci является общим отношением рассогласований между передачами обратной линии связи и передачей прямой линии связи, γ является отношением рассогласований усиления между трактами передатчиков и приемников терминала доступа и ηi является отношением рассогласований трактов приема и передачи для i-й антенны в точке доступа. Следует заметить, что γ является в основном константой для каждой пары антенн в точке доступа. Также в некоторых отношениях уравнение 3 идеализировано, так как оценка шума не включена в него.
Отношения ci, i=1, …, M калибровки, где М является числом антенн в антенной решетке точки доступа, могут быть сгруппированы в один вектор  для каждого терминала доступа, который может называться "вектор калибровки".
для каждого терминала доступа, который может называться "вектор калибровки".

В уравнении 4 входы вектора  соответствуют оценкам для каждой антенны точки доступа в отношении единственного терминала доступа. Следует заметить, что элементы вектора
соответствуют оценкам для каждой антенны точки доступа в отношении единственного терминала доступа. Следует заметить, что элементы вектора  могут быть комплексными числами, включающими рассогласование (неидентичности) как по амплитуде, так и по фазе для каждого тракта передачи и приема антенной решетки точки доступа, а также общего рассогласования, соответствующего рассогласованиям передачи и приема трактов передатчиков и приемников терминала доступа. Следует заметить, что хотя уравнение 4 описывает вектор, который имеет входы для антенн одного терминала доступа, он может включать входы для множества терминалов доступа.
могут быть комплексными числами, включающими рассогласование (неидентичности) как по амплитуде, так и по фазе для каждого тракта передачи и приема антенной решетки точки доступа, а также общего рассогласования, соответствующего рассогласованиям передачи и приема трактов передатчиков и приемников терминала доступа. Следует заметить, что хотя уравнение 4 описывает вектор, который имеет входы для антенн одного терминала доступа, он может включать входы для множества терминалов доступа.
Вектор n включает в себя эффекты ошибок измерений канала (MSE) и также эффекты декорреляции измерений канала, так как измерения усилений выполняются в различные моменты времени, таким образом, разрешая изменение канала в течение времени, а также температуры и другие изменения для воздействия на измерение.
Оцениваемый вектор  калибровки, соответствующий терминалам доступа, может определяться, как показано ниже в уравнении 5.
калибровки, соответствующий терминалам доступа, может определяться, как показано ниже в уравнении 5.

где γu является рассогласованием усиления, соответствующего тракту передачи и приема терминала доступа и η является вектором рассогласования, соответствующим трактам передачи и приема антенной решетки точки доступа. Вектор  определен для всех антенн антенной решетки точки доступа.
определен для всех антенн антенной решетки точки доступа.
В вышеизложенном следует заметить, что существует несколько способов для комбинирования различных оценок вектора калибровки (соответствующих измерениям от различных терминалов доступа) для формирования общего или комбинированного вектора калибровки. Одним способом выполнить эту комбинацию является усреднение всех оценок вектора калибровки для получения единственной оценки.
В этом подходе каждая оценка вектора калибровки включает в себя мультипликативный множитель γu, который различен для различных терминалов доступа. В случае, где один или более терминалов доступа имеет очень большое рассогласование γu усиления, простое усреднение может привести к s результатам, смещающим среднее к терминалам доступа, которые имеют самое большое рассогласование γu усиления.
В другом аспекте каждая оценка вектора калибровки, соответствующая конкретному терминалу доступа, нормализуется согласно элементу вектора. Это может предоставлять минимизацию в тех случаях, где один или более терминалов доступа имеют высокое рассогласование γu усиления. Эта обработка отображена ниже в уравнении 6.
Следует заметить, что в определенных аспектах элемент нормализации может быть любым элементом вектора калибровки, пока он является тем же самым элементом для каждой оценки вектора калибровки, например первым элементом. Сумма нормализованных элементов затем делится на общее число элементов U вектора 
Другой подход, который может использоваться для комбинирования различных оценок вектора калибровки, может быть основан на комбинировании оцениваемых векторов в матрице. Например, в определенных аспектах, может быть так, что каждая оценка вектора калибровки является повернутой и масштабируемой версией того же самого вектора η, и поворот и масштабирование возникают из-за различных рассогласований γu терминала доступа. Одним способом избавиться от этого масштабирования и поворота является первоначальная нормализация каждого вектора калибровки, чтобы иметь единичную норму. Затем матрица Q, столбцы которой являются нормализованными оценками вектора калибровки, может формироваться из векторов калибровки. Единственная оценка для вектора калибровки получается с помощью выполнения декомпозиции матрицы, например, декомпозиция по сингулярным значениям матрицы Q. Собственный вектор, соответствующий максимальному сингулярному значению, может использоваться как общая оценка вектора калибровки, например, как показано в уравнении (7) ниже.

Как проиллюстрировано в трех подходах выше, отношение калибровки в общем оценивается в два этапа. Сначала значения, соответствующие элементам векторов калибровки, вычисляются для антенной решетки или антенн, представляющих интерес в отношении отдельных терминалов доступа. Затем векторы калибровки комбинируются согласно одному или более различным математическим процессам.
Альтернативой вычислению множества векторов калибровки является использование процедуры совместной оптимизации, использующей множество точек доступа и измерений доступа следующим образом. В некоторых случаях терминал доступа и точка доступа могут формировать свои оценки канала для различных частотных тонов и в различные моменты времени. Дополнительно, может быть ошибка τk,u синхронизации между точкой доступа и u-м терминалом доступа в момент времени k. В таком случае оценка gi,k,u вектора канала прямой линии связи, измеряемая в терминале доступа, может быть связана с оценкой hi,k,u вектора канала обратной линии связи, измеряемой в точке доступа. Один подход, который использует вектор η калибровки и рассогласование γu для терминала доступа, отображен в уравнении 8 ниже.

В уравнении (8) Zi,k,u является диагональной матрицей, диагональные элементы которой являются элементами оценки hi,k,u вектора канала обратной линии связи и  Нижние индексы i, k, u являются индексами тона, времени и пользователя соответственно. В вышеупомянутом уравнении неизвестными являются вектор η калибровки и конкретное рассогласование γi,k,u терминала доступа. Особенностью уравнения 8 является то, что рассогласование терминала доступа включает в себя эффект рассогласования синхронизации между точкой доступа и терминалом доступа в дополнение к рассогласованию усилений, обусловленному трактами передачи и приема терминала доступа. Одним способом, чтобы получить решение для η и γi,k,u, является использование подхода минимальной среднеквадратической ошибки (MMSE), как показано в уравнении 9.
Нижние индексы i, k, u являются индексами тона, времени и пользователя соответственно. В вышеупомянутом уравнении неизвестными являются вектор η калибровки и конкретное рассогласование γi,k,u терминала доступа. Особенностью уравнения 8 является то, что рассогласование терминала доступа включает в себя эффект рассогласования синхронизации между точкой доступа и терминалом доступа в дополнение к рассогласованию усилений, обусловленному трактами передачи и приема терминала доступа. Одним способом, чтобы получить решение для η и γi,k,u, является использование подхода минимальной среднеквадратической ошибки (MMSE), как показано в уравнении 9.
Решения для η и γi,k,u могут быть заданы уравнением 10 ниже.
η = минимальный собственный вектор 
где для вектора x оператор  ортогональной проекции может быть определен как
ортогональной проекции может быть определен как

Для того чтобы скомпенсировать рассогласования, отношения калибровки могут использоваться для изменения усиления, в терминах либо фазы и/или амплитуды тракта передатчика точки доступа для его согласования с трактом приемника или, эквивалентно, для изменения усиления тракта приема точки доступа для согласования с трактом передачи.
В некоторых аспектах может быть также желательно калибровать усиление в отношении только фазы или как фазы, так и амплитуды. Это объясняется тем, что в некоторых случаях метод калибровки может ухудшить рассогласование по амплитуде. Это можно легко увидеть, рассматривая экстремальный случай, где нет рассогласования по фазе и присутствует только рассогласование по амплитуде в рассогласованиях усиления. В этом случае усиление за счет формирования диаграммы направленности с калибровкой хуже, чем усиление за счет формирования диаграммы направленности без калибровки, что означает, что рассогласование по амплитуде становится хуже. Способом для улучшения является использование калибровки только по фазе для формирования диаграммы направленности вместо калибровки, использующей амплитуду и фазу для вычисления весов калибровки. В этом случае калиброванные веса формирования диаграммы направленности вычисляются только для фазы. Аспект этого подхода для формирования диаграммы направленности MRC отображен в уравнении 12 ниже.

где diag(η⌀)=diag(ϕη).
Хотя фиг.2 отображает и описывает один вариант осуществления тракта 102 приемника и тракта 104 передатчика, могут использоваться другие компоновки и структуры. Например, может использоваться различное число компонентов как в тракте 102 приемника, так и в тракте 104 передатчика. Кроме того, различные устройства и структуры могут также замещаться.
Фиг.3 иллюстрирует временной цикл для калибровки от единственного терминала доступа, где используется система TDD, которая имеет единственный кадр или пакет прямой линии связи, смежный с единственным кадром или пакетом обратной линии связи. Как можно видеть, один или более пилот-сигналов, передаваемых по обратной линии связи, измеряется в точке доступа. Интервал времени измерения является функцией интервала декодирования точки доступа. Во время интервала декодирования один или более пилот-сигналов передаются по прямой линии связи в терминал доступа. Терминал доступа затем измеряет пилот-сигналы для оценки канала прямой линии связи. Как и с оценками обратной линии связи, существует некоторое запаздывание в декодировании. Декодированные оценки прямой линии связи необходимо передать обратно в точку доступа для того, чтобы сформировать отношение калибровки. Следовательно, можно видеть, что существует некоторая минимальная величина времени и, следовательно, максимальное быстродействие терминала доступа, для которого может поддерживаться калибровка без сдвига, который является сильным или в значительной степени мешающим фактором.
Как можно увидеть из фиг.3, если используются многочисленные оценки канала от многочисленных терминалов доступа, ассоциируемые шум и сдвиг могут снижаться или, по меньшей мере, дискретизироваться по интервалу промежутков времени и трактам приема.
Фиг.4 иллюстрирует аспекты логики, которая способствует калибровке антенной решетки для компенсации рассогласования усиления. Система 300 содержит компонент 302 калибровки, который включает в себя компонент 304 оценки рассогласования, который анализирует модели выходных сигналов трактов приемников и/или сравнения между выходными сигналами трактов приемников, и блок 306 вычисления калибровки и определения использует множество методов калибровки для формирования весов калибровки, например, используя вектор η для различных типов калибровки и затем выбирает один тип калибровки на основе степени рассогласования, которое является результатом использования различных типов калибровки. В определенных аспектах это может быть выполнено, используя только оценки фазы для вычисления весов калибровки или используя оценки фазы и амплитуды для вычисления весов калибровки.
Фиг.5 иллюстрирует аспекты системы, которая способствует калибровке антенной решетки для компенсации рассогласования усиления. Система 400 содержит процессор 402, который оперативно соединен с антенной решеткой 404. Процессор 402 может определять веса калибровки на основе множества методов калибровки. Процессор 402 дополнительно содержит компонент 406 калибровки, который выбирает один тип калибровки на основе степени рассогласования, которое является результатом использования различных типов калибровки.
Система 400 может дополнительно содержать память 408, которая оперативно соединена с процессором 402 и которая хранит информацию, связанную с калибровкой решетки, формированием отношения, различными типами методов калибровки, критериями для выбора различных типов методов калибровки и любой другой соответствующей информацией, связанной с калибровкой антенной решетки 404. Следует принимать во внимание, что процессор 402 может быть процессором, предназначенным для анализа и/или формирования информации, принятой процессором 402, процессором, который управляет одним или более компонентами системы 400 и/или процессором, который как анализирует, так и формирует информацию, принятую процессором 402 и управляет одним или более компонентами системы 400.
Память 408 может дополнительно хранить протоколы, ассоциируемые с формированием копий сигналов и моделями/представлениями, оценками рассогласований и т.д., так что система 400 может использовать сохраненные протоколы и/или алгоритмы для реализации калибровки антенны, выбора метода и/или компенсации рассогласования, как описано в данном документе. Понятно, что компоненты информационного хранилища (например, память), описанные в данном документе, могут быть либо энергозависимой памятью, либо энергонезависимой памятью или могут включать в себя как энергозависимую, так и энергонезависимую память. В качестве иллюстрации, а не ограничения, энергонезависимая память может включать в себя постоянное запоминающее устройство (ПЗУ, ROM), программируемое ПЗУ (ППЗУ, PROM), электрически стираемое ПЗУ (ЭСПЗУ, EPROM), электрически стираемое и программируемое ПЗУ (ЭСППЗУ, EEPROM), или флэш-память. Энергозависимая память может включать в себя оперативное запоминающее устройство (RAM), которое выступает в качестве внешнего кэша. В качестве иллюстрации, а не ограничения, ОЗУ имеется в распоряжении во многих видах, таких как синхронное ОЗУ (SRAM), динамическое ОЗУ (DRAM), синхронное DRAM (SDRAM), SDRAM с удвоенной скоростью (DDR SDRAM), усовершенствованное SDRAM (ESDRAM), DRAM с синхронным каналом (SLDRAM), и ОЗУ с шиной прямого резидентного доступа (DRRAM). Память 408 рассматриваемых систем и способов предназначена, чтобы содержать, без ограничения, эти и любые другие подходящие типы памяти.
На фиг.6 проиллюстрирован метод, связанный с формированием назначений дополнительных системных ресурсов. Например, методы могут относиться к калибровке антенной решетки в среде TDMA, среде OFDM, среде OFDMA, среде CDMA или какой-либо другой соответствующей беспроводной среде. Хотя в целях упрощения пояснения методы показаны и описаны как последовательность действий, необходимо понимать и принимать во внимание, что методы не ограничены порядком действий, поскольку некоторые действия могут, в соответствии с одним или более вариантами осуществления, осуществляться в различном порядке и/или параллельно с другими действиями, что показано и описано в данном документе. Например, специалистам в данной области техники должно быть понятно, что методология, в качестве альтернативы, могла бы быть представлена как последовательность взаимосвязанных состояний или событий, таких как на диаграмме состояний. Более того, не все проиллюстрированные действия могут быть необходимы, чтобы реализовать методологию в соответствии с одним или более вариантами осуществления.
В определенных аспектах память 408 может хранить векторы  калибровки для каждого режима, т.е. уровень усиления AGC. В таких аспектах для каждой передачи процессор 402 может получать доступ к вектору
калибровки для каждого режима, т.е. уровень усиления AGC. В таких аспектах для каждой передачи процессор 402 может получать доступ к вектору  калибровки для режима AGC без выполнения калибровки. Решение относительно того, выполнять ли дополнительную калибровку или получать доступ к вектору
калибровки для режима AGC без выполнения калибровки. Решение относительно того, выполнять ли дополнительную калибровку или получать доступ к вектору  калибровки для заданной передачи, может основываться на интервале времени или числе передач с момента получения вектора
калибровки для заданной передачи, может основываться на интервале времени или числе передач с момента получения вектора  калибровки для режима AGC. Это может быть системный параметр или может изменяться на основе условий канала, например загрузки канала.
калибровки для режима AGC. Это может быть системный параметр или может изменяться на основе условий канала, например загрузки канала.
Фиг.6 иллюстрирует аспекты методологии для калибровки решетки антенн для передачи. Оценки канала для прямой линии связи принимаются от терминалов доступа, блок 500. Как обсуждено выше, эти оценки канала могут быть сформированы точкой доступа из пилот-сигналов прямой линии связи. Кроме того, оценки канала для информации обратной линии связи, например пилот-сигналы канала обратной линии связи, формируются точкой доступа, блок 502.
После того, как получены оценки канала прямой и обратной линии связи, отношения калибровки для каждого терминала доступа и антенны точки доступа могут быть определены, блок 504. В некоторых аспектах самая последняя оценка канала прямой и обратной линии связи в отношении друг друга в момент времени проиллюстрирована для формирования отношения калибровки. В таких случаях множество оценок для заданного терминала доступа могут выполняться на основе последовательных пар оценок канала из оценок прямой и обратной линии связи.
Как обсуждено в отношении фиг.3, может существовать некоторое запаздывание во времени между различными вычислениями и передачами. Дополнительно функциональные возможности для блоков 500 и 502 могут иметь место в основном одновременно или в различные моменты времени для того же самого или различных терминалов доступа. Следовательно, отношение калибровки может определяться для заданного терминала доступа на основе оценок передач канала прямой и обратной линий связи, которые могут быть или могут не быть последовательными во времени.
Отношения калибровки затем комбинируются для создания оценки калибровки по множеству терминалов доступа, блок 506. Эти комбинированные отношения калибровки могут включать в себя отношения калибровки в некоторых или во всех терминалах доступа в заданном секторе или соте и иметь неравное или равное число отношений калибровки для каждого терминала доступа, для которого получены одно или более отношений калибровки.
Комбинированное отношение калибровки может быть получено простым усреднением отношений калибровки или использованием других подходов, обсуждаемых в отношении фиг.2, например подходов, обсуждаемых в отношении уравнений 5 или 7.
Каждая передача от каждого канала передачи точки доступа затем взвешивается с весами на основе комбинированного отношения калибровки для этого тракта передачи. Также комбинированный или совместный набор весов калибровки может использоваться для одного или более трактов передачи точки доступа. Альтернативно возможно передавать это комбинированное отношение калибровки или команду калибровки на основе комбинированного отношения калибровки в один или более терминалов доступа. Терминалы доступа затем используют веса на основе комбинированного отношения калибровки для декодирования передач, принятых в терминале доступа.
Также в некоторых аспектах веса калибровки используются для конкретного состояния AGC и не для других состояний AGC. Как таковой, блок 508 будет затем применяться только для состояния AGC в продолжение блока 500.
Фиг.7 иллюстрирует другую методологию для калибровки решетки антенн для передачи. Оценки канала для прямой линии связи принимаются от терминалов доступа, блок 600. Как обсуждено выше, эти оценки канала могут быть сформированы точкой доступа из пилот-сигналов прямой линии связи. Кроме того, оценки канала для информации обратной линии связи, например пилот-сигналов канала обратной линии связи, формируются точкой доступа, блок 602.
После того, как получены оценки канала прямой и обратной линий связи, отношение калибровки использует множество оценок канала для множества терминалов доступа, блок 504. В определенных аспектах используется самая последняя по времени оценка канала прямой и обратной линий связи в отношении друг друга. В таких случаях множество оценок для заданного терминала доступа могут выполняться на основе последовательных пар оценок канала для оценок прямой и обратной линий связи.
Как обсуждено в отношении фиг.3, может существовать некоторое запаздывание во времени между различными вычислениями и передачами. Дополнительно функциональные возможности для блоков 600 и 602 могут иметь место в основном одновременно или в различные моменты времени для того же самого или различных терминалов доступа. Следовательно, оценки калибровки могут определяться для заданного терминала доступа на основе оценок передач канала прямой и обратной линий связи, которые могут быть или могут не быть последовательными во времени.
Общее отношение калибровки может быть получено использованием общего процесса оптимизации, как обсуждено в отношении фиг.2, например, в уравнении 8.
Каждая передача от каждого тракта передачи точки доступа затем взвешивается с весами на основе комбинированного отношения калибровки для этого тракта передачи. Также комбинированный или общий набор весов калибровки может использоваться для одного или более трактов передачи точки доступа. Альтернативно возможно передавать это общее отношение калибровки или команду калибровки на основе общего отношения калибровки в один или более терминалов доступа. Терминалы доступа затем используют веса на основе комбинированного отношения калибровки для декодирования передач, принятых в терминале доступа.
Также в некоторых аспектах веса калибровки используются для конкретного состояния AGC и не для других состояний AGC. Как таковой, блок 608 будет затем применяться только для состояния AGC в продолжение блока 600.
Фиг.8 показывает примерную систему 1300 беспроводной связи. Система 1300 беспроводной связи отображает одну базовую станцию и один терминал для краткости. Однако следует принимать во внимание, что система может включать в себя более чем одну базовую станцию и/или более чем один терминал, при этом дополнительные базовые станции и/или терминалы могут быть в основном аналогичны или различны по отношению к примерной базовой станции и терминалу, описанным ниже. Кроме того, следует принимать во внимание, что базовая станция и/или терминал могут использовать системы (фиг.1-5) и/или способы (фиг.6-7 или 10), описанные в данном документе, чтобы облегчить беспроводную связь между ними.
Согласно фиг.8, при передаче по прямой линии связи, в точке 1305 доступа, процессор 1310 данных передачи (ТХ) принимает, форматирует, кодирует, перемежает и модулирует (или отображает на символы) данные графика и предоставляет символы модуляции ("символы данных"). Модулятор 1315 символов принимает и обрабатывает символы данных и пилотные символы и предоставляет поток символов. Модулятор 1315 символов мультиплексирует данные и пилотные символы по соответствующим поднесущим, обеспечивает значение сигнала, равное нулю, для каждой неиспользуемой поднесущей и получает набор из N символов передачи для N поднесущих для каждого интервала символов. Каждый символ передачи может быть символом данных, пилотным символом или сигнальным значением, равным нулю. Пилотные символы могут передаваться непрерывно в каждом интервале символов. Понятно, что пилотные символы могут быть мультиплексированы с временным разделением (ТОМ), мультиплексированы с частотным разделением (FDM), мультиплексированы с ортогональным частотным разделением (OFDM), мультиплексированы с кодовым разделением (CDM) и т.д. Модулятор 1315 символов может преобразовывать каждое множество N передаваемых символов во временную область, используя N-точечное обратное быстрое преобразование Фурье (IFFT) для получения "преобразованного" символа, который содержит N элементарных посылок временной области. Модулятор 1315 символов типично повторяет часть каждого преобразованного символа для получения соответствующего символа. Повторяемая часть известна как циклический префикс и используется для противодействия задержке, распространяемой в беспроводном канале.
Передающий блок 1320 (TMTR) принимает и преобразует поток символов в один или более аналоговых сигналов и дополнительно преобразует (например, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы для формирования сигнала прямой линии связи, подходящего для передачи по беспроводному каналу. Сигнал прямой линии связи затем передается через антенну 1325 в терминалы. В терминале 1330 антенна 1335 принимает сигнал прямой линии связи и предоставляет принятый сигнал в приемный блок 1340 (RCVR). Приемный блок 1340 преобразует (например, фильтрует, усиливает и преобразует с понижением частоты) принятого сигнала и преобразует в цифровой вид преобразованный сигнал для получения выборок. Демодулятор 1345 символов удаляет циклический префикс, присоединенный к каждому символу, преобразует каждый принятый преобразованный символ в частотную область, используя N-точечное FFT, получает N принятых символов для N поднесущих для каждого интервала символов и предоставляет принятые пилот-сигналы в процессор 1350 для оценки канала. Демодулятор 1345 символов дополнительно принимает оценку частотной характеристики для прямой линии связи от процессора 1350, выполняет демодуляцию данных по принятым символам данных для получения оценок символов данных (которые являются оценками переданных символов данных) и предоставляет оценки символов данных в процессор 1355 данных RX, который демодулирует (например, проводит обратное отображение символов), обратно перемежает и декодирует оценки символов данных для восстановления переданных данных графика. Обработка с помощью демодулятора 1345 символов и процессора 1355 данных RX является дополнительной к обработке с помощью модулятора 1315 символов и процессора 1310 данных ТХ, соответственно, в точке 1305 доступа.
По обратной линии связи процессор 1360 данных ТХ обрабатывает данные графика и предоставляет символы данных. Модулятор 1365 символов принимает и мультиплексирует символы данных с пилотными символами, выполняет модуляцию и предоставляет поток символов. Пилотные символы могут передаваться на поднесущих, которые назначены терминалу 1330 для передачи пилот-сигнала, где множество поднесущих пилот-сигнала для обратной линии связи может быть тем же самым или отличным от числа поднесущих пилот-сигнала для прямой линии связи. Передающий блок 1370 затем принимает и обрабатывает поток символов для формирования сигнала восходящей линии связи, который передается с помощью антенны 1335 в точку 1305 доступа.
В точке 1305 доступа сигнал обратной линии связи от терминала 1330 принимается с помощью антенны 1325 и обрабатывается приемным блоком 1375 для получения выборок. Демодулятор 1380 символов затем обрабатывает выборки и предоставляет принятые пилотные символы и оценки символов данных для обратной линии связи. Процессор 1385 данных RX обрабатывает оценки символов данных для восстановления данных графика, передаваемых терминалом 1330. Процессор 1390 выполняет оценку канала для каждого активного терминала, передающего по обратной линии связи.
Процессор 1390 может также конфигурироваться для использования множества методов калибровки для вычисления весов для калибровки и для выбора весов, вычисленных согласно одному из методов, как обсуждено в отношении фиг.2 и 10.
Процессоры 1390 и 1350 направляют (например, контролируют, координируют, управляют и т.д.) работой в точке 1305 доступа и, соответственно, терминале 1330. Соответствующие процессоры 1390 и 1350 могут ассоциироваться с блоками памяти (не показано), которые хранят программные коды и данные. Процессоры 1390 и 1350 могут также выполнять вычисления для получения оценок частотной и импульсной характеристик для обратной и, соответственно, прямой линии связи.
Согласно фиг.9, точка доступа может содержать основной модуль 1400 (MU) и радиомодуль 1475 (RU). MU 1450 включает в себя цифровые компоненты базовой полосы точки доступа 1400. Например, MU 1450 может включать в себя компонент 1405 базовой полосы и цифровой обрабатывающий модуль 1410 промежуточной частоты (IF). Цифровой обрабатывающий модуль 1410 IF обрабатывает данные радиоканала на промежуточной частоте с помощью выполнения таких функций, как фильтрование, канализация, модуляции и так далее. RU 1475 включает в себя аналоговые радиокомпоненты точки доступа 1400. Как используется в данном документе, радиомодуль является аналоговыми радиокомпонентами точки доступа или приемопередаточной станцией другого типа с прямым или непрямым соединением с центром коммутации мобильной связи или соответствующим устройством. Радиомодуль типично служит конкретным сектором в системе связи. Например, RU 1475 может включать в себя один или более приемников 1430, соединенных с одной или более антеннами 1435a-t для приема радиопередачи от мобильных абонентских узлов. В одном аспекте один или более усилителей 1482 a-t соединены с одной или более антеннами 1435 a-t. Аналогово-цифровой (A/D) преобразователь 1425 соединен с приемником 1430. Преобразователь 1425 A/D преобразует аналоговую радиопередачу, принятую приемником 1430 в цифровой входной сигнал для передачи компоненту 1405 базовой полосы через цифровой IF-обрабатывающий узел 1410. RU 1475 может также включать в себя один или более передатчиков 1420, соединенных либо с той же самой или другой антенной 1435 для передачи радиопередач в терминалы доступа. Цифроаналоговый (D/A) преобразователь 1420 соединен с передатчиком 1415. Преобразователь 1415 D/A преобразует цифровые передачи, принятые от компонента 1405 базовой полосы через узел 1410 цифровой IF-обработки в аналоговый выходной сигнал для передачи в мобильные пользовательские узлы. В некоторых аспектах мультиплексор 1484 для мультиплексирования сигналов множества каналов и мультиплексирования множества сигналов, включающих в себя речевой сигнал и сигнал данных. Центральный процессор 1480 соединен с основным модулем 1450 и радиомодулем 1475 для управления различной обработкой, которая включает в себя обработку речевого сигнала или сигнала данных.
Фиг.10 иллюстрирует аспекты методологии для определения типа калибровки для применения. Веса калибровки определяются для подходов, которые выполняются, используя только информацию о рассогласовании фазы, блок 1500, и используя информацию о рассогласовании фазы и амплитуды, блок 1502. Только фазовая информация может включать в себя только фазу векторов калибровки, оценки канала или тому подобное для вычисления весов калибровки. Фазовая и амплитудная информация может включать в себя фазовую и амплитудную информацию векторов калибровки, оценки канала или тому подобное для вычисления весов калибровки. Веса калибровки могут вычисляться на основе информации от множества терминалов доступа, как описано в отношении фиг.6 и 7. Альтернативно они могут вычисляться из информация для единственного терминала доступа.
Затем делается выбор, какой набор весов использовать, блок 1504. Определение может быть сделано на основе того, хуже ли рассогласование по амплитуде после использования весов калибровки, которые могут быть вычислены в точке доступа, чем без калибровки. В некоторых аспектах это может основываться на следующем уравнении 13:

В уравнении 13 σα представляет разницу по амплитуде между некалиброванными и калиброванными весами для тракта передачи антенны точки доступа и σβ представляет разницу по амплитуде между некалиброванными и калиброванными весами для тракта приема антенны точки доступа. Затем может быть определено, превышают ли они некоторое пороговое значение для их взаимосвязи. Например, больше ли минимум, чем максимум на некоторый заранее определенный или системный вычисленный коэффициент, например, 3. В других случаях определение, одно ли или оба из σα и σβ превышают некоторое заранее определенное пороговое значение. В других случаях могут использоваться различные измерения рассогласования калибровки, пороговые значения или взаимосвязи. Затем используются выбранные веса, блок 1506.
Для системы множественного доступа (например, системы множественного доступа с частотным разделением (FDMA), системы множественного доступа с ортогональным частотным разделением (OFDMA), системы множественного доступа с кодовым разделением (CDMA), системы множественного доступа с временным разделением (TDMA) и т.д.) множество терминалов могут передавать одновременно по обратной линии связи. Для подобной системы поднесущие пилот-сигналов могут совместно использоваться среди различных терминалов. Методы оценки канала могут использоваться в случаях, где поднесущие пилот-сигналов для каждого терминала охватывают всю рабочую полосу (возможно, исключая края полосы). Подобная структура поднесущих пилот-сигналов является желательной для получения частотного разнесения для каждого терминала. Методы, описанные в этом документе, могут реализовываться различными средствами. Например, эти методы могут реализовываться аппаратными средствами, программным обеспечением, либо их сочетанием. Для аппаратной реализации обрабатывающие блоки, используемые для оценки канала, могут быть реализованы в одной или более специализированных интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), цифровых сигнальных обрабатывающих устройствах (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, спроектированных для выполнения функций, описанных в данном документе, или их сочетании. С помощью программного обеспечения реализация может быть обеспечена посредством модулей (например, процедур, функций и так далее), которые выполняют функции, описанные в данном документе. Коды программного обеспечения могут сохраняться в блоке памяти и выполняться процессорами 1390 и 1350.
То, что было описано выше, включает в себя примеры одного или более вариантов осуществления. Естественно, невозможно описать каждую возможную комбинацию компонентов или принципов для целей описания вышеупомянутых вариантов осуществления, но специалисту в данной области техники должно быть понятно, что возможны многие дополнительные комбинации и преобразования различных вариантов осуществления. Соответственно, подразумевается, что описанные варианты осуществления охватывают все подобные изменения, модификации и вариации, которые попадают в пределы сущности и объема прилагаемой формулы изобретения. Более того, в той степени, в которой термин "включает в себя", используется либо в подробном описании или формуле изобретения, подразумевается, что подобный термин является инклюзивным, аналогично термину "содержащий", как последний интерпретируется, когда используется в качестве переходного слова в формуле изобретения.


Изобретение относится к технике связи и может быть использовано в системах беспроводной связи. Калибровка для тракта передачи устройства, передающего информацию множеству устройств по беспроводным линиям связи, включает в себя выбор из двух или более методов определения калибровки, отличающихся друг от друга методами калибровки. Указанные методы включают в себя калибровку только по фазе и калибровку по фазе и амплитуде. Технический результат - компенсация рассогласований. 4 н. и 23 з.п. ф-лы, 10 ил.
1. Способ калибровки антенной решетки, содержащий этапы, на которых
определяют веса калибровки для антенной решетки на основе первого метода калибровки;
определяют веса калибровки для антенной решетки на основе второго метода калибровки, который является отличающимся методом калибровки; и
определяют, применять ли веса калибровки из первого метода или второго метода.
2. Способ по п.1, в котором определение на основе первого метода калибровки содержит определение на основе информации только фазы.
3. Способ по п.2, в котором определение на основе второго метода калибровки содержит определение на основе информации фазы и амплитуды.
4. Способ по п.2, в котором информация только фазы содержит информацию оценки канала.
5. Способ по п.2, в котором информация только фазы содержит компоненты вектора калибровки.
6. Способ по п.1, в котором определение, применять ли веса калибровки из первого метода или второго метода, содержит определение на основе отношения выхода, предоставляемого первым методом калибровки, выходу, предоставляемому вторым методом калибровки.
7. Способ по п.1, в котором определение, применять ли веса калибровки из первого метода или второго метода, содержит определение разницы между рассогласованием по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки.
8. Способ по п.1, в котором определение, применять ли веса калибровки из первого метода или второго метода, содержит определение разницы между отношением разницы между минимумом рассогласования по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки, и максимумом рассогласования по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки.
9. Способ по п.1, в котором определение на основе первого метода калибровки и определение на основе второго метода калибровки содержит определение на основе только информации от единственного терминала доступа.
10. Способ по п.1, в котором определение на основе первого метода калибровки и определение на основе второго метода калибровки содержит определение на основе только информации от множества терминалов доступа.
11. Способ по п.1, в котором определение на основе первого метода калибровки содержит определение на основе информации фазы и амплитуды.
12. Устройство беспроводной связи, содержащее по меньшей мере, две антенны и процессор, соединенный с, по меньшей мере, двумя антеннами, причем процессор сконфигурирован для определения типа калибровки, чтобы применять для осуществления связи с помощью двух антенн, из, по меньшей мере, двух типов калибровки, при этом, по меньшей мере, один тип калибровки является отличающимся типом калибровки.
13. Устройство беспроводной связи по п.12, в котором один тип калибровки является типом калибровки на основе информации только фазы.
14. Устройство беспроводной связи по п.13, в котором другой тип калибровки является типом калибровки на основе информации фазы и амплитуды.
15. Устройство беспроводной связи по п.12, в котором процессор конфигурирован для определения типа калибровки на основе отношения выхода, предоставляемого первым методом калибровки, по отношению к выходу, предоставляемому вторым методом калибровки.
16. Устройство беспроводной связи по п.12, в котором процессор конфигурирован для определения типа калибровки на основе разницы между рассогласованием по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки.
17. Устройство беспроводной связи по п.12, в котором процессор конфигурирован для определения типа калибровки на основе разницы между отношением разницы между минимумом рассогласования по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки, и максимумом рассогласования по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки.
18. Устройство беспроводной связи по п.12, в котором процессор конфигурирован для определения типа калибровки на основе информации только от единственного терминала доступа.
19. Устройство беспроводной связи по п.12, в котором процессор конфигурирован для определения типа калибровки на основе информации только от множества терминалов доступа.
20. Устройство для калибровки антенной решетки, содержащее
средство для определения весов калибровки для антенной решетки на основе первого метода калибровки;
средство для определения весов калибровки для антенной решетки на основе второго метода калибровки, который является отличающимся методом калибровки; и
средство для определения, применять ли веса калибровки из первого метода или второго метода.
21. Устройство по п.20, в котором средство для определения на основе первого метода калибровки содержит средство для определения на основе информации только фазы.
22. Устройство по п.21, в котором средство для определения на основе второго метода калибровки содержит определение на основе информации фазы и амплитуды.
23. Устройство по п.20, в котором средство для определения, применять ли веса калибровки из первого или второго метода, содержит средство для определения на основе отношения выхода, предоставляемого первым методом калибровки, к выходу, предоставляемому вторым методом калибровки.
24. Устройство по п.20, в котором упомянутое средство для определения, применять ли веса калибровки из первого или второго метода, содержит средство для определения разницы между рассогласованием по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки.
25. Устройство по п.20, в котором упомянутое средство для определения, применять ли веса калибровки из первого или второго метода, содержит средство для определения разницы между отношением разницы между минимумом рассогласования по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки, и максимумом рассогласования по амплитуде между некалиброванной передачей и выходом первого метода калибровки и некалиброванной передачей и выходом второго метода калибровки.
26. Устройство по п.20, при этом упомянутое средство для определения на основе первого метода калибровки содержит средство для определения на основе информации фазы и амплитуды.
27. Носитель, читаемый процессором, хранящий команды, читаемые процессором, для предписывания процессору определять веса калибровки для антенной решетки на основе первого метода калибровки; определять веса калибровки для антенной решетки на основе второго метода калибровки, который является отличающимся методом калибровки; и определять, применять ли веса калибровки первого метода или второго метода.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU 2002106105 A1, 10.09.2003 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ соединения эластичных труб | 1977 |
|
SU642191A1 |

