Изобретение относится к летающим средствам легче воздуха, а именно к дирижаблям.
Известен дирижабль Л-72 «Цеппелин» (см. Моделист-конструктор, 1975 г., стр.59, прототип).
Недостатками прототипа являются:
1. Водородная оболочка подвержена взрывам от внутренних причин, от статического электричества и от грозовых разрядов.
2. При наличии сильного встречного ветра невозможно идти курсом против ветра, невозможно осуществить безаварийную посадку. Дирижабль попадает в катастрофическую ситуацию без специальных мачт и якорей.
3. Устройство недостаточно маневренно при подъемах и спусках.
4. Устройство не может формировать авиапоезда.
5. Транспортная система зависима от погодных условий.
6. Устройство неэкономично, ибо использует силу отталкивания от воздуха, что требует больших затрат энергии.
7. Устройство не снабжено автоматическими средствами авиаконтроля и управления.
Эти и другие недостатки устраняются предлагаемым изобретением.
Технический результат заключается в расширении функциональных возможностей и области применения летательных кораблей легче воздуха.
Технический результат реализуется тем, что воздушно-тросовая транспортная система, содержащая корабль легче воздуха с подвешенным к нему грузопассажирским отсеком, двигателем с пропеллерами, рулем поворота, согласно изобретению корабль имеет аэрообтекаемую форму, создающую подъемную силу, внутри корабля находится главный движитель с двумя вращающими пропеллерами и восемью каналами (4 спереди, 4 сзади), главный двигатель находится в шахте, верхняя и нижняя часть ее, а также 8 каналов закрыты управляемыми жалюзями, по бокам корабля находятся гондолы, имеющие аэрообтекаемую форму и обеспечивающие подъемную силу при движении, внутри гондолы находятся боковые двигатели, между гондолами и основным телом корабля размещается парусная система, на поверхности корабля находится парашютная система, силовая конструкция корабля выполнена в виде тросов, силовых сегментов, натяжителей и соединителей, низ корабля состоит из элементов грузовой части, выполненных в виде замкнутых поверхностей определенной формы и соединенных тросами и силовыми сегментами, имеющих крепления для строп, удерживающих вместимости, для, например: гелия и горячего воздуха, корабль снабжен системой циклического подогрева носителя, системой подачи гелия и его откачки, системой подогрева носителя теплом выходящих газов, системой разворачивания и сворачивания вместимостей, аэродинамически закрывающих их оболочкой, корабль имеет возможность объединяться в авиапоезда путем соединения тросами и силовыми сегментами, надетыми на эти троса, каждый из кораблей активный или пассивный может быть соединен с тянущей тележкой тросом и коммуникациями, тянущая тележка с помощью колесных движителей, соединена с тросом, протянутым от станции к станции и лежащим на поверхности, движитель тяговой тележки состоит из ряда верхних и нижних подпружиненных колес, объединенных приводом с коробкой передач и двигателем тяговой тележки, получаемое топливо, например, из автономного бака тяговой тележки, газообразное топливо из соответствующего корабля по коммуникациям или электрическое напряжение (через трос), двигатель подключен к редуктору, который через барабан может изменять расстояние между тележкой и кораблем, корабль снабжен регулируемым крылом, обеспечивающим дополнительную подъемную силу при движении, корабль снабжен бурами и зацепами для укрепления при стоянке, каждая станция снабжена поворотным и сдвигающим столом, по которому отделяемая верхняя часть тележки переходит к другой транспортной тележке в транспортном узле, станция снабжен краном для перемещения тяговых тележек и погрузочно-разгрузочными стойками, корабль снабжен компьютерной, радиолокационной и другими системами управления.
Изобретение поясняется чертежами фиг.1 - фиг.10. На фиг.1 изображен корабль (вид сверху); на фиг.2 - корабль (морской вариант), вид сбоку; фиг.3 - корабль (сухопутный вариант), вид сбоку; фиг.4 - вид корабля спереди (в разрезе); фиг.5 - схема авиапоезда кораблей; фиг.6 - схема тяговой тележки; фиг.7 - блок управления оболочками; фиг.8 и 9 - элементы транспортной системы; фиг.10 - структурная схема управления кораблем.
Воздушно-тросовая транспортная система состоит из корабля, тяговой тележки, тросовой системы. Корабль (фиг.1) состоит из оболочки 1, обтягивающей вместимости 2 для рабочего газа (горячий воздух, гелий). Форму корабля задает система тросов 3 и набранных на них силовых сегментов (СС) 4. В одном сегменте (СС) 4 может проходить один или несколько тросов 3. При натяжении троса достигается необходимая упругость конструкции и вместе с тем остается гибкость. Тросы между собой крепятся специальным креплением (СК) 5. Оболочка 1 имеет специальную форму обеспечивающую подъемную силу при движении. Корабль имеет хвостовой сегмент 6, с рулем высоты 7 и рулем поворота 8. Форма моторных гондол 9 также определена СК 5, тросами 3, вместимостями 2 и покрывающей их оболочкой 1.
Каждая вместимость 2 имеет силовой элемент 10 (фиг.4), который удерживает ее в напряженном состоянии.
Корабль имеет несколько движителей. Один или несколько главных ГД 11, содержащих не менее двух пропеллеров 12, вращающих в разные стороны (как показано стрелками на фиг.1). ГД 11 содержит двигатель, вертикальную круглую шахту 13, закрывающиеся верхние и нижние жалюзи 14, имеет не менее 8 каналов 15. Причем каждая сторона (фиг.1) имеет по 4 канала, одни каналы входят в шахту 13 выше, а другие ниже пропеллера. Каждый из 8 каналов 15 снабжен жалюзями 16, имеющими систему управления. ГД 11 предназначен для организации горизонтальной и вертикальной тяги. В каждой из двух гондол 9 находятся боковые движители БД 17, предназначенные для создания горизонтальной тяги. Они содержат двигатель, подключенный к соответствующему пропеллеру 18. Буквой В показан выход горячих выхлопных газов. Буквой П показан поток воздуха, буквой ВУ - ветровые усилия (для попутного ветра). Гондолы 9 имеют пропускной канал 19 для воздуха, прогоняемого пропеллерами 18. Между основным корпусом корабля и гондолами крепятся паруса 20. Длина корабля обозначается буквой D, длина гондолы d, ширина наибольшей части корабля  , хвостовой части
, хвостовой части  .
.
На фиг.2 изображен вид корабля в разрезе, здесь буквой Н обозначена высота корабля, буквой hk - высота грузовой части (остова) корабля, который состоит из герметичных элементов грузовой части ЭГЧ 21, набранных шпангоутами 22, стрингерами, кницами и панелями 23. Через ЭГЧ 21 проходят тросы 3, на которые надеты силовые сегменты 4. Секции (ЭГЧ-21) для осуществления прохода персонала соединены гофрами 24. В ЭГЧ 21 размещаются груз, системы управления, жизнеобеспечения. К ним (с помощью креплений 25 (колец)) крепится оболочка 1 и силовые элементы 10 вместимостей 2. Все тросы-стропы находятся в натянутом состоянии.
На фиг.2 изображен морской вариант корабля, на фиг.3 - сухопутный. В морском варианте гондолы 9 крепятся выше (с учетом погружения корабля). Низ гондолы защищен от механических повреждений. Размеры ЭГЧ 21 определены их назначением: силовая установка, кабина экипажа, пассажирский отсек, топливо, система управления и т.д. На поверхности оболочки 1 находятся парашюты 26 для спасения всего корабля. Они же могут использоваться и в качестве мягкого крыла для увеличения скорости корабля при попутном ветре.
На фиг.4 изображен вид спереди корабля (в разрезе). Здесь показаны позиции, которые были обозначены ранее. Боковые крышки 27 для грузовых отсеков, пассажиры находятся в пространстве 28. Груз так же может крепиться к нижним кольцам 25.
На фиг.5 изображен авиапоезд кораблей, где показаны их силуэты 29.1. Позиция 30 - это упругие связи, набранные (как было выше описано) тросами 3 и силовыми сегментами 4.
Корабли могут быть активными 29.1 и пассивными 29.2. Активные содержат установки автономного перемещения и торможения, а пассивные несут топливо или груз, например газ (метан).
Корабль 29.1 или все корабли 29 посредством соответствующих каждому тросом 31 подключены к соответствующей тележке 32, которая зацеплена за трос 33, лежащий на поверхности 34.
На фиг.6 изображена схема тяговой тележки ТТ 32, к которой прикреплен трос 31, прикрепленный к кораблю 29. С тросом соединены идущие коммуникационная система 35 от корабля 29 топливо (газ (метан)), электроэнергия, информация (канал контроля и управления). ТТ 32 имеет две кабины 36 с пультами управления 37, местом для пилота (при ручном управлении) 38. Емкость 38.1 для топлива, двигательная установка 39 (двигатель внутреннего сгорания, электрический двигатель и т.д.), коробка переключения передач (КПП) 40, редуктор 41, барабаны для троса 42, карданный вал 43.
ТТ-32 имеет колесные движители КД 44, через которые проходит трос 33 КД 44 через механизмы (цепь 45, редуктор 46, вал 47) подключены к КПП 40, КД 44 объединены тягами 48. Верхняя часть ВЧ 49, ТТ 32 перемещается по направляющим 50 с помощью специального привода 51. КД 44 имеет несколько колес (верхних 52 и нижних 53) которые могут вращаться вокруг оси, крепящихся к средней 54, нижней 55 балке. Эти балки между собой стянуты штангой 56 и закреплены держателями 57. Верхняя балка 58 перемещается по штанге 56 и посредством пружин 59 прижимает колеса 52, 53 к тросу 33.
На фиг.7 изображены системы управления:
а) накачивания вместимостей 2 гелием и поддержания заданного давления;
б) поддержание заданной температуры воздуха в вместимостях 2;
в) разворачивания и сворачивания оболочек.
Вместимости 2 корабля 29 являются многослойными: силовой слой, защитный слой, термослой, слой для прокачки горячего теплоносителя (воздуха), слой, препятствующий проникновению носителя воздуха (гелия), и другие слои. Здесь два типа вместимостей: для содержания гелия и содержания горячего воздуха. Блок наполнения гелием БНГ 60 состоит из гелиевых баллонов ГБ 61, насосов 62, подключенных к индивидуальным клапанам 63, которые соединены с вместимостями 2, в которых находятся датчики давления 64, которые соединены с системой управления СУ 65, которая так же подключена к насосам 62, к клапанам 63, входящему клапану 66, выходящему клапану 67. Здесь может быть организован процесс последовательной подачи горячего теплоносителя или параллельная подача. В первом случае в клапаны 66 входит горячий теплоноситель, идет в соответствующую термооболочку, выходит по соответствующему каналу и попадает в термообменник 68 вместимости 2 и т.д. до выходного клапана 67. При параллельной подаче каждая вместимость 2 снабжена входящим 66 и выходящим 67 клапанами, выходы которых соответствующим образом объединены.
Блок нагревания носителя БНН 69 состоит из фильтра 70, подключенного к крану 71, подключенного к насосу 72, подключенного к крану 73, подключенного к теплообменнику 74, подключенного к клапанам 75, которые подключены к трубкам 76 вместимостей 2. Выходные трубки 77 вместимостей 2 подключены к выходным клапанам 78, выходы которых объединены и подключены к клапану 79, выход которого так же подключен к насосу 72, выход которого так же подключен к клапану 80, выход которого выходит вне системы. Топливо поступает через клапан 81 в нагреватель 82, который соединен с теплооболочками 74. Канал отработанных газов нагревателя 82 подходит к клапану 83 (который осуществляет выброс газов далее по системе) и к входу охладителя 84, который подключен к входам входных клапанов 85 всех термооболочек 68 вместимости 2, выходы которых подключены к выходному клапану 86, выход которых является выходом этой системы. Датчик давления 87 и температуры 88 каждой вместимости подключен к системе управления СУ 89, управляющие входы/выходы которого подключены к управляющим входам/выходам клапана 71, насоса 72, клапана 73, клапана 79, клапанов 75, 78, 81, 85, 86, охладителя 84 и нагревателя 82.
Блок разворачивания/сворачивания оболочек БРС-90 состоит из привода оболочек 91, подключенного к барабану 92, на который наматывается стропа 93, которая подсоединена к оболочке 1, привода 94, подключенного к барабану 95, подключенного к стропам 96, которые являются силовыми элементами вместимостей 2. Приводы 91, 94 подключены к системе управления блока СУ 96.1, подключенного к процессору. Блоки БНГ 60, БНН 69, БРС 90 образуют блок управления оболочки БУО 97.
На фиг.8а, 8б показаны элементы предлагаемой воздушно-транспортной системы. В позиции а) показана схема силовых сегментов 4, через отверстия которых проходят тросы (стропы) 3. В позиции б) показана общая схема авиапоезда, где 32 - это тяговая тележка, пассивная тележка 98. Впереди идет корабль сопровождения 29.2. В позиции в) изображены варианты расположения тягового троса 33. В 1-ом положении показан просто трос 33, лежащий на поверхности (земля, вода, болото, асфальт, бетон, песок и т.д.). Во 2-ом положении показан трос 33, охватываемый колесами 52, 53 и соединенный креплением 99 с контактными колесами (щетками) 100, которые вращаются (скользят) по токопроводам 101, которые находятся в трубах (пластмассовых оболочках) 102, закрытые верхней крышкой 103. В позиции 3 показаны трубные оболочки 102 с крышками 103. В средней трубе находится силовой трос 33, а в крайних трубах спаренные токопроводы 101а и 101б. Величина труб определяется характером местности. Трубы объединены скобой 104. На позиции 4 изображен монорельс трос 33. Здесь силовые тросы 105, по которым катятся колеса 52, 53. 101 - токопроводы, 106 - отверстие для прокачки жидкости (для других целей трубопровода). Высота (Нт) выбирается в зависимости, от местности, свойств материалов и напряжения между токопроводами. На позиции 5 изображена опора 106, которая крепится на грунте 107. На ней крепится трос 108, а на перекладинах крепятся другие тросы 109. Трос 110 прикреплен к кораблю.
В пункте Г позиции 1 изображен вариант корабля с крыльями 111, обеспечивающий подъемную силу. Вид крыла изображен в позиции 2. Здесь Р1 - сила натяжения поверхности поперек, Р2 - сила натяжения поверхности (покрывало, оболочка) вдоль, Р - подъемная сила. В позиции 3 изображен вариант складывающего крыла 111 в направлении А. Оно вдвигается в позицию 112. Здесь привод 113. Крыло разворачивается для обеспечения подъемной силы и разгрузки конструкции и убирается при посадке, шторме и т.д.
Пункт Д - изображен якорь в виде бура 114. При посадке он закапывается в грунт.
Пункт Е - показано размещение газообразного топлива, например метана (легче воздуха) и (или) жидкого топлива в ЭГЧ-21.
На фиг.9 изображены элементы транспортной системы. На позиции а) показаны станция 115, на которую натянуты тросы 33, находящиеся на определенном расстоянии друг от друга. Заданы места определенных аварийных посадок.
На позиции б) показан вариант преодоления водных преград (река-116), путем наезда тележки на речной буксир 117 до следующей станции 115.
На позиции в) показан вариант авиапоезда на сухопутном тягаче 117.
На позиции г) показана схема транспортного узла. Здесь: 1 - тяговая тележка 32 с верхней части 49; 2 - тяговая тележка 49 на сдвиговом (или поворотном столе) 118. Кран 119 осуществляет перемещение с 1-ой на другие линии на площадку отстоя 120.
На позиции д) показана схема варианта погрузки и разгрузки. 1. - Корабль 29 (с опущенной оболочкой 1) на эстакаде
2. Корабль 29 находится на поверхности 34. Идет загрузка из транспортных средств 121 в боковые люки корабля (или погрузка).
Программное обеспечение управления находится в процессоре 122. На фиг.10 приведена структурная схема управления корабля.
Устройство работает следующим образом.
Тросы 3 и силовые сегменты задают форму корабля 29. Тросы натянуты, например, гидравлическими цилиндрами. В качестве тросов могут быть использованы силовые стропы или нити, изготовленные из пластмассовых материалов. Использование строп тросов 3 и силовых сегментов позволяют кораблю 29 гибко реагировать на переменные нагрузки в процессе полета. Поскольку силовые сегменты так же изготавливаются из пластиковых материалов (резиновых, надувных), то они являются гибкими и уменьшается вероятность появления трещин. Сами стропы 3 крепятся элементами 25, как показано на фиг.4. Нижняя часть корабля в виде ЭГЧ 21 тоже является упругим и гибким и реагирует на возмущение среды. Процессор 122 через СУ 60 подает команды и насосы 62 начинают работать (все или необходимое их количество) для вместимости 2, которое необходимо заполнить. Соответственно краны 63 для соответствующих вместимостей 2 открыты. По команде от СУ 65 гелий заполняет соответствующие вместимости 2. При этом процессор через СУ 96.1 дает соответствующие команды для работы приводов 91, 94, которые освобождают стропы 93, 96, и вместимости 2, заполненные гелием, принимают заданную форму.
Процессор через СУ 89 открывает клапана 81, топливо (например, метан) поступает в нагреватель 82, СУ 89 открывает клапан 71, включает насос 72, закрывает клапан 80, открывает клапан 73 и через теплообменник 74 (получает тепло от нагревателя 82), наполнитель (например, воздуха) проходит через открытый клапан 75 и в входящую трубку, попадая в верхнюю часть вместимости 2, заполняет их. СУ 89 получает информацию от датчиков давления 87 и температуру 88 наполнителя вместимости 2. При достижении заданного давления СУ 89 (реагирует соответственно заданной программе). Процессор 122 закрывает клапан 71, открывает клапаны 78, 79, производит движение носителя по заданному контуру вместимости 2, клапан 78, клапан 79, насос 72, клапан 73, теплообменник 74, клапан 75 вместимости 2 и т.д. Выхлопные газы из нагревателя 82 поступают через охладитель 75 в термооболочку 68 и тем самым уменьшают теплоотдачу оболочек носителя, находящихся в вместимостях 2. Таким образом носитель нагревается, а датчик температуры 88 показывает СУ 89 код этой температуры. При достижении заданного давления и температуры носителя вместимости 2 СУ 89 включает нагреватель 82 или переводит его в дежурный режим поддержания температуры.
Через клапан 86 выхлопной газ выходит из системы. Если СУ 89 открывает клапан 83, то выходящий газ поступает в теплообменник БИТ 60 вместимости 2 при открытии клапанов 66, 67. Прогревая другой носитель, например, гелий. При поступлении соответствующей команды от СУ 89 клапан 80 открывается, а клапан 79 закрывается. Нагреватель 82 выключается (клапан 81 закрыт). Носитель из вместимости 2 выходит из системы. Так работает блок нагрева носителя БНН 69. Для обеспечения заданной формы корабля 29, при стандартном режиме, аварийном опускании, в штормовом положении на поверхности 34 служит БРС 90. По команде процессора 122, СУ 96.1 включают соответствующие привода 91, 94 и барабаны 92, 95, наматывает стропы 93, 96, уменьшая (или увеличивая) вместимость 2 и соответственно оболочку 1 (до заданных пределов).
В штормовых случаях оболочка сворачивается и корабль 29 находится в большей безопасности, чем в случае с развернутой оболочкой.
При аварийной ситуации в воздухе процессор (согласно заложенной программе) обеспечивает подачу команд (срабатывает система парашютов (мягкое крыло)), которая позволяет посадить корабль в заданном пункте и избежать катастрофы.
Элементы грузовой части 21 могут быть выполнены с высокой верхней частью для незатопления этой части водой при приводнении.
Движение корабля вверх/вниз возможно осуществить за счет:
1. изменения температуры и объема носителя в вместимостях 2;
2. изменения температуры и объема гелия в вместимостях 2;
3. путем запуска главного движетеля 11.
ГД 11 работает следующим образом: Процессор на своих И выходах вырабатывает соответствующие команды и ГД 11 начинает работать. ГД 11 может вращать с разной скоростью в разные стороны 2 пропеллера, изменять угол атаки пропеллеров. Благодаря тому, что винт вращается в разные стороны, реактивный и инертный момент работы ГД 11 равен нулю. Для того чтобы возникла подъемная сила вверх, угол наклона винта стоит в соответствующем положении так, чтоб воздух шел сверху вниз. При этом процессор вырабатывает команду на открывание верхних и нижних жалюзей 14. При нулевой плавучести корабль 29 (пустой или с грузом) может подняться вверх. При смене угла винта на обратный создается тяга вниз. Пара передних каналов 15, находящихся выше пропеллера 12. Другая пара каналов 15 (слева и справа) находится ниже пропеллеров 15. Каждый канал 15 закрыт снаружи управляемыми процессором жалюзями 16. При открытых передних верхних каналах и закрытых нижних ГД 11 будет создавать тягу и корабль 29 будет двигаться вперед. Другие каналы 15 с жалюзями 16 будут закрыты. При открытых верхних задних каналах 15 жалюзей 16 и нижних передних каналов 15 жалюзей 16 (остальные каналы закрыты) создается тяга и корабль 29 идет задним ходом. Если открыты верхние левые и нижние правые каналы 15 и соответствующие жалюзи 16, то корабль 29 идет боком в левую сторону.
Если открыты верхние правые и нижние левые каналы 15 и соответствующие жалюзи 16, то корабль 29 идет боком вправо.
Повороты корабля 29 ГД 11 осуществляются следующим образом. При режиме движения вперед и закрытом правом заднем канале 15 поворот будет осуществляться вправо, при закрытом левом заднем - поворот налево. Также при режиме движения назад.
Эти повороты осуществляются как на месте, так и в процессе движения. В процессе движения повороты могут осуществляться рулем поворота 8. При этом процессор вырабатывает соответствующий сигнал и привод руля 8 совершает движения, определяющие поворот корабля 29.
Повороты корабля 29 можно осуществлять с помощью боковых двигателей 17, которые располагаются в боковых гондолах 9 по одному (или нескольких) на каждом торце. Пропеллер 18 БД 17 так же может изменять шаг винта. Если правая сторона БД 17 работает на тягу вперед, а левая БД 17 на тягу назад, то осуществляется поворот налево, и наоборот, если БД 17 обеих создает тягу вперед, то корабль 29 движется вперед. Если БД 17 создает тягу назад, то корабль 29 движется назад.
БД 17 может создать силу торможения. При движении корабля 29 курсом, совпадающим с движением ветра (на определенной высоте). Корабль 29 имеет возможность экономить топливо и для этого развернуть систему парусов 20, 26 по команде, выданной процессором 122.
Для обеспечения большей скорости движения корабля 29 его лобовое сопротивление уменьшается за счет работы БРС 90. При этом происходит натяжение на поверхность крыла 111 (фиг.8) (1, 2, 3). Возникающая подъемная сила может позволить уменьшить объем корабля 29 (в связи с этим уменьшается лобовое сопротивление).
На фиг.10 приведена возможная структура, известных в настоящее время, блоков и аппаратных комплексов, входящих в систему управления кораблем 29.
1. Локатор курса вперед. Прибор позволяет получать карту местности или летящих объектов впереди корабля снизу и боковые поверхности по курсу.
2. Локатор курса назад.
3. Локатор верхнего сектора.
4. Локатор нижнего сектора.
5. Локатор бокового левого сектора.
6. Локатор бокового правого сектора.
7. Ультразвуковой эхолот, осуществляющий замер высоты с помощью ультразвуковых волн.
8. Локатор, позволяющий по существующим облакам определить на какой высоте и куда дует ветер.
9. Магнитный компас, который снабжен электронным блоком связи с процессором.
10. Гирокомпас так же снабжен каналом связи с процессором.
11. GPS-прибор для определения своих координат (с помощью спутниковых систем).
12. Барометр (с электронным блоком) позволяет получать давление в местностях нахождения корабля.
13. Высотомер.
14. Комплексный набор карт, позволяющий получать через процессор информацию о местности, на которой находится корабль.
15. Обычная картотека карт с электронным и электромеханическим блоком получения нужной информации.
16. Система радиосвязи (в KB, УКВ и в других диапазонах, радио и цифровая связь с базой спасения, авиадиспетчерами и т.д.).
17. Спутниковая связь - связь по радиоканалу со спутником.
18. Интернет-связь по спутниковому радиоканалу.
19. Сотовая связь в зоне действия оператора сотовой связи.
20. Проводная связь по токопроводам.
21. Телевизионная система приема информации от спутника или местной телестанции.
22. Автопилот - бортовая компьютерная система, позволяющая отслеживать автоматический полет по заданной траектории.
23. Черный ящик параметров - прибор, фиксирующий записи параметров во время аварии
24. Черный ящик - электронный прибор, позволяющий записать переговоры экипажа.
25. Система защиты от молнии. Металлизированные участки корабля с выводом на тяговый трос или заземление на стоянке.
26. Система защиты от статического электричества.
27. Система датчиков пожаротушения, автоматическая система информации экипажа о возгорании на корабле и эффективные средства тушения огня.
28. Система охраны и видеонаблюдения. Система позволяет с помощью видеокамер осуществлять видеонаблюдение всех точек корабля и местности вокруг него. Система охраны информирует экипаж о несанкционированных проникновениях, контролируемых помещений и приближение к контуру корабля на стоянках.
29. Система управления двигателем для горизонтального движения. Автоматическая электронная система, выполняющая команды по координации средств, обеспечивающих вертикальное движение, при этом она определяет какие двигатели будут работать, какие жалюзи будут закрыты и т.д.
30. Система управления двигателями для обеспечения вертикального движения. Электронный блок на базе процессора, осуществляющий подачу команд вверх/вниз, серию команд по управлению движением, жалюзи, пропеллерами и т.д.
31. Система управления рулями. Электронный блок, осуществляющий выполнение команд поворота, разворота, наклоны и т.д.
32. Система подачи топлива осуществляет контроль и управления насосами подачи топлива в двигатель корабля.
33. Система подачи и преобразования электроэнергии.
34. Система бортового электрооборудования. Набор двигателей и генераторов, аккумуляторов, источников освещения, проводников, приборов для обеспечения функций корабля, которым необходимо электрическое напряжение.
35. Оружейная система. Большие размеры корабля и системы кораблей авиапоезда требуют охраны.
36. Система погрузки/разгрузки, контроля груза, электронный блок управления люками, дверьми, трапами, механизмами для осуществления погрузки и разгрузки и контроля крепления грузов корабля.
37. Система управления крыльями. Электронный блок управления поверхностью крыльев.
38. Система управления парусами. Электронный блок, осуществляющий развертывание и свертывание парусов.
39. Система управления парашютами. Электронный блок управления выбросом парашютов и в необходимых случаях их сворачиванием.
40. Система станционной стабилизации. Электронный блок управления бурами, приводами, зацепами, контроля их натяжения, обеспечения устойчивости на земле.
41. Система управления наполнением носителя.
42. Система освещения. Система, обеспечивающая освещение опознавательных знаков, световой информации, освещение корабля в ночное время, освещение пути.
43. Система отопления. Система обеспечения заданной температуры параметров в кабине экипажа, в вагонах пассажиров и грузовых отсеках.
44. Система жизнеобеспечения экипажа и пассажиров: водопровод, водоснабжение, канализация, приготовление пищи, очистка воздуха и т.д.
45. Система утилизации выхлопных газов двигателя. Система позволяет направлять выхлопные газы двигателей на нагрев термооболочек корабля.
46. Система развертывания и свертывания оболочки.
47. Система датчиков силы скорости и направления ветра позволяет получать от приборов информацию о параметрах воздушной среды.
48. Система измерения скорости корабля.
49. Система оптического видео. Набор оптических приборов для наблюдения местности.
50. Система внутреннего телевидения. Электронный блок, позволяющий осуществить обмен видеоинформации в пределах корабля.
51. Система быстрого спасения пассажиров и груза. Состоит из парашютных систем индивидуальных и групповых для спасения экипажа, пассажиров и груза, и самого корабля.
52. Система управления тяговыми тележками движения по тросу. Электронный блок, задающий параметры движения по тросу.
53. Система экстренного спуска корабля. Электронный блок управления, обеспечивающий торможение и опускание на поверхность
54. Система экстренного спуска корабля.
55. Система ультра и инфракрасных лучей (ночное видение). Система обеспечения получения визуальной информации в ночное время суток и в тумане.
56. Система обеспечения движения на воде. Электронный блок управления обеспечения заданной поверхности корабля при определенном весе.
57. Система контроля тягового троса. Электронная система обеспечивает контроль целостности троса, по которому движется тяговая тележка.
58. Система датчиков оболочки температур за бортом. Электронная система, позволяющая информировать экипаж и системы управления температуры о режимах за бортом и поверхности оболочки корабля.
59. Автоматический блок служебных инструкций. Инструкторский блок на базе процессора позволяет принимать решения экипажу, сообщающая ему варианты решений в различных ситуациях.
Выше было рассмотрено движение корабля в автономном режиме. Корабль 29 может вести за собой авиапоезд (фиг.5), который связан с ним гибкими сцепками. Изготовлен он так же из тросов и сегментов, не позволяющий этим тросам складываться (работающие не только на растяжение, но и на сжатие). ТТ 32 взаимодействуя с тросом 33, создает тяговое усилие. Прокладку троса может осуществлять специальный корабль 29 - тросоукладчик. Затраты на прокладку троса намного меньше, чем затраты на изготовление подвесной дороги, железной дороги, автодороги или авиасистем. Трос легко располагается на сухой поверхности на скалистом, песчаном грунте, на поплавках и т.д. Толщина троса зависит от пропускной способности транспортных систем. Впереди главного корабля авиапоезда может следовать корабль 29 сопровождения для проверки целостности тягового троса.
Тяговая тележка 32 работает следующим образом. Двигательная установка 39 получает топливо из емкости 38 под управлением оператора через пульт управления 37. (Топливо так же может поступать по коммуникациям 35). Тяговое усилие передается с помощью редуктора 41, барабан 42 и затем на трос между ТТ 32 и кораблем 29. Посредством КПП 40 вращающий момент от ДУ 39 передается на редуктор 46 через вал 47, цепь 45 на верхнее колесо 52 и нижнее колесо 53. Система штанг 56 зажимает трос 33 между верхними колесами 52 и нижними колесами 53, которые входят в зацепление с тросом 33 и осуществляют перемещение корабля 29 в заданном направлении с заданной скоростью. Тормозная система ТТ 32 здесь не показана. (ТТ 32 снабжается дисковыми или тормозами колодочного типа стандартного образца.) Тросовая система может иметь просто вид троса (фиг.8а поз.1). Если ТТ 32 на электрической тяге, то токопроводы могут быть помещены в трубе. Чем длиннее перегон, тем выше необходимое напряжение и тем больше диаметр трубы.
В поз.2 показан вариант троса внутри трубы. В поз.5 показана опора для подвеса троса и токопроводов; фиг.8б поз.д показан бур для закрепления корабля на стоянке. Вместо бура может быть использована система зацепов и т.д.
Работа корабля 29 в воздушно-тросовой транспортной системе требует определенной организации и механизмов. На фиг.9а показаны варианты перемещения поездов по 2-колейному участку между тросами. Натяжение между тросами должно быть достаточное, чтобы не допустить столкновения кораблей (авиапоездов).
На фиг.9 поз.б показана переправа авиапоезда буксиром через водную преграду и поз.в транспортным средством 117.
Для осуществления движения в разных направлениях в воздушно-тросовой транспортной системе предусмотрены транспортные станции (фиг.9г). У каждого ТТ 32 верхняя часть ВЧ 49 специальным приводом 51 сдвигается и может перемещаться на сдвиговый стол 118 и далее на другую тяговую тележку 32. Для того чтобы тележка не упала, предусмотрены стояночные упоры (на фигурах не показаны). ТТ 32 краном 119 переносится на площадку 120. В других узлах осуществляется процедура схождения тросовых путей и их расхождение. Загрузка корабля 29 и его авиапоездов осуществляется либо со специальных платформ или на площадках, которые не требуют специального оборудования.
По сравнению с прототипом предлагаемое устройство обеспечивает следующие преимущества:
1. Наполнение гелием оболочки не позволяет осуществиться взрыву ни от статического электричества, ни от грозовых разрядов, ни от других причин.
2. Оболочка, наполненная горячим воздухом, позволяет уменьшить затраты на гелий.
3. Организация замкнутого цикла нагревания носителя (подогрев оболочки теплотой выходных газов) позволяет уменьшить затраты на нагрев носителя.
4. Корабль оборудован сворачиваемыми оболочками, что позволяет переждать сильный ветер. В морском варианте - уменьшить объем оболочек для обеспечения плавучести и дрейфа в сторону ветра с последующим выходом на сушу.
5. В случае попутного ветра корабль позволяет использовать силу ветра для движения.
6. Предлагаемый корабль легко осуществляет маневры, повороты на месте, на скорости, подъем, опускание.
7. Устройство не ограничено в размерах составных поездов и в связи с этим грузоподъемностью
8. Корабли, организованные в воздушно-тросовую транспортную систему, используют преимущество тяги троса, связанного с поверхностью и воздушных судов, с минимальным взаимодействием с поверхностью являются необходимым средством, позволяющим осваивать большие территории.
9. Система не требует больших капитальных вложений и может расти путем добавления новых участков.
10. Корабль снабжен компьютерными системами и средствами управления, что позволяет повысить безопасность его функционирования.
11. Использование подъемной силы крыла совместно с регулируемыми оболочками позволяет достигать больших скоростей передвижения.
12. Обеспечивает большую безопасность пассажиров и грузов по сравнению с любыми средствами передвижения.
13. Позволяет использовать топливо, которое легче воздуха, например метан, и транспортировать грузы на очень большое расстояние без заправки.
14. Позволяет организовывать гарантированную доставку грузов и пассажиров в ночное, зимнее, штормовое и т.д. время в районы, которые сегодня недоступны для серьезных экономических инвестиций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРУСНЫЙ НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ КУЩЕНКО В.А. | 2009 |
|
RU2403171C1 |
| Привязная территориально распределенная воздушная система технического наблюдения | 2024 |
|
RU2828468C1 |
| ПАРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА КУЩЕНКО В.А. | 2009 |
|
RU2403398C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУШНЫМИ ПОТОКАМИ ДЛЯ РЕГУЛИРОВАНИЯ АТМОСФЕРНЫХ ЯВЛЕНИЙ КУЩЕНКО В.А. | 2010 |
|
RU2457670C2 |
| ГИДРОЭЛЕКТРОСТАНЦИЯ МОРСКОГО ТЕЧЕНИЯ КУЩЕНКО В.А. | 2009 |
|
RU2405965C1 |
| АТМОСФЕРНАЯ ЭЛЕКТРИЧЕСКАЯ СТАНЦИЯ КУЩЕНКО В.А. | 2009 |
|
RU2403691C1 |
| ВОЗДУШНО-ЛЕТАТЕЛЬНЫЙ АППАРАТ КУЩЕНКО В.А. | 2010 |
|
RU2436710C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОГИДРОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ КУЩЕНКО В.А. | 2009 |
|
RU2411379C2 |
| АКТИВНЫЙ ПРОПАШНОЙ АГРЕГАТ | 2009 |
|
RU2400036C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2009 |
|
RU2402896C1 |
Изобретение относится к летательным аппаратам легче воздуха. Воздушно-тросовая транспортная система содержит корабль легче воздуха с грузопассажирским отсеком, двигателем с пропеллерами и рулем поворота. Корабль имеет главный двигатель с двумя вращающими пропеллерами, боковые двигатели, парусную систему и парашютную систему. Внизу корабля находятся элементы грузовой части, выполненные в виде замкнутых поверхностей, соединенных тросами и силовыми сегментами, имеющими крепления для строп, удерживающих вместимости для гелия и горячего воздуха. Корабль снабжен системами циклического подогрева теплоносителя, подачи гелия и его откачки, подогрева теплоносителя теплом выходящих газов, разворачивания и сворачивания вместимостей. Корабль может быть объединен с другими кораблями в авиапоезд путем соединения тросами и силовыми сегментами. Активный или пассивный из кораблей соединен с тяговой тележкой тросом и коммуникациями. Тяговая тележка с помощью двигателя соединена с тросом, протянутым от станции к станции. Двигатель тяговой тележки состоит из ряда верхних и нижних подпружиненных колес и привода с коробкой передач. Двигатель подключен к редуктору, который через барабан может изменять расстояние между тележкой и кораблем. Корабль снабжен регулируемым крылом, бурами и зацепами. Изобретение направлено на расширение функциональных возможностей. 10 ил.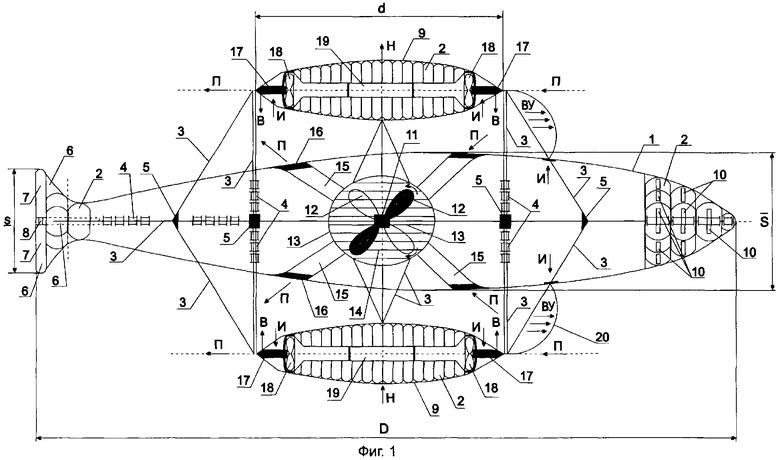
Воздушно-тросовая транспортная система, содержащая корабль легче воздуха с подвешенным к основному корпусу грузопассажирским отсеком, двигателем с пропеллерами, рулем поворота, отличающаяся тем, что корабль имеет аэрообтекаемую форму, создающую подъемную силу, внутри корабля в шахте расположен главный двигатель с двумя вращающимися пропеллерами и восемью каналами, четыре канала спереди и четыре канала сзади, каждый канал в верхней и нижней частях шахты закрыт управляемыми жалюзи, по бокам корабля расположены гондолы, имеющие аэрообтекаемую форму и обеспечивающие подъемную силу при движении, внутри гондолы расположены боковые двигатели, между гондолами и основным корпусом корабля размещена парусная система, на поверхности основного корпуса корабля расположена парашютная система, силовая конструкция корабля включает тросы, силовые сегменты, натяжители и соединители, низ корабля состоит из элементов грузовой части, выполненных в виде замкнутых поверхностей, соединенных тросами и силовыми сегментами, имеющими крепления для строп, удерживающих вместимости для теплоносителя, включающего гелий и горячий воздух, корабль снабжен системой циклического подогрева теплоносителя, системой подачи и откачки гелия, системой подогрева теплоносителя теплом выходящих газов, системой разворачивания и сворачивания вместимостей, аэродинамически закрывающей их оболочкой, корабль выполнен с возможностью объединения с другими кораблями в авиапоезда путем соединения тросами и силовыми сегментами, надетыми на тросы, каждый из кораблей, активный или пассивный, соединен с тяговой тележкой тросом и коммуникациями, каждая тяговая тележка с помощью колесных движителей соединена с тросом, протянутым от станции к станции и лежащим на поверхности, каждый движитель тяговой тележки состоит из ряда верхних и нижних подпружиненных колес, объединенных приводом с коробкой передач и двигателем тяговой тележки с возможностью получения газообразного топлива из автономного бака тяговой тележки или из соответствующего корабля по коммуникациям или получения электрического напряжения через трос, двигатель подключен к редуктору, который через барабан может изменять расстояние между тележкой и кораблем, корабль снабжен регулируемым крылом, обеспечивающим дополнительную подъемную силу при движении, корабль снабжен бурами и зацепами для укрепления при стоянке, каждая станция снабжена поворотным и сдвигающим столом, по которому отделяемая верхняя часть тележки переходит к другой транспортной тележке в транспортном узле, станция снабжен краном для перемещения тяговых тележек и погрузочно-разгрузочными стойками, корабль снабжен компьютерной и радиолокационной системами управления.
| US 6792872 А, 21.09.2004 | |||
| Воздушная транспортная система | 1978 |
|
SU885087A1 |
| Воздушная транспортная система инженера в.н.андрейченко | 1976 |
|
SU770890A1 |

