Область техники
Настоящее изобретение относится к устройству управления силой торможения/движения транспортного средства, и в частности к устройству управления силой торможения/движения транспортного средства, которое управляет силой торможения/движения каждого колеса.
Уровень техники
Одно из устройств управления силой торможения/движения для транспортного средства, такого как автомобиль, известно из, например, непрошедшей экспертизу заявке на патент Японии №HEI9-309357 и предназначено для управления распределением силой движения, прикладываемой к правым и левым колесам для сообщения требуемого момента, вызывающего вращение вокруг вертикальной оси, транспортному средству (далее - момента вращения). Кроме того, известно устройство управления силой торможения, которое управляет силой торможения/движения и моментом вращения транспортного средства путем управления силами торможения колес, чтобы обеспечить устойчивость движения транспортного средства. Это устройство управления силой торможения/движения может повысить устойчивость движения транспортного средства.
В общем случае силой торможения/движения и моментом вращения транспортного средства можно управлять посредством управления силами торможения/движения колес. Однако существует ограничение в силе торможения/движения, которое может быть создано каждым колесом. Таким образом, может возникнуть ситуация, когда сила торможения/движения или момент вращения, необходимый транспортному средству, превышает значение, достижимое при управлении силами торможения/движения колес. Такая ситуация не учитывается упомянутым выше обычным устройством управления силой торможения/движения, и с этой точки зрения необходимо внести усовершенствования.
Когда целевая сила торможения/движения и/или целевой момент вращения, необходимые транспортному средству, превышают значения, достижимые при управлении силами торможения/движения колес, эти целевая сила торможения/движения и/или целевой момент вращения могут быть модифицированы таким образом, что после модификации они принимают значения, которые могут быть достигнуты силами торможения/движения колес, и имеют как можно большую величину. В этом случае при резком изменении целевой силы торможения/движения целевой момент вращения после упомянутой модификации резко увеличивается или уменьшается, а при резком изменении целевого момента вращения целевая сила торможения/движения после упомянутой модификации резко изменяется, что приводит к ухудшению устойчивости движения транспортного средства, и пассажир или пассажиры ощущают дискомфорт.
Краткое описание изобретения
Настоящее изобретение создано с учетом описанной выше характеристики обычного устройства управления силой торможения/движения транспортного средства, которое предназначено для управления силой торможения/движения и моментом вращения транспортного средства путем управления силами торможения/движения колес, и основной задачей настоящего изобретения является достижение максимально возможных силы торможения/движения и момента вращения, необходимых транспортному средству, даже когда эти сила и/или момент превышают значения, достижимые при управлении силами торможения/движения колес, а также предотвращение резких изменений силы торможения/движения и момента вращения, даже если целевая сила торможения/движения и/или целевой момент вращения, необходимые транспортному средству, резко изменяются.
Упомянутая выше основная задача может быть достигнута при использовании устройства управления силой торможения/движения транспортного средства, которое содержит средство приложения силы торможения/движения, которое выполнено с возможностью приложения силы торможения/движения к колесам; средство измерения характеристики движения, задаваемой водителем; средство вычисления целевой силы торможения/движения транспортного средства и целевого момента вращения транспортного средства, которые должны быть созданы силами торможения/движения колес, на основе, по меньшей мере, характеристики движения, задаваемой водителем; средство модификации целевой силы торможения/движения и/или целевого момента вращения таким образом, чтобы целевая сила торможения/движения после модификации и целевой момент вращения после модификации принимали значение, достижимое силами торможения/движения колес, когда целевая сила торможения/движения и целевой момент вращения не могут быть достигнуты силами торможения/движения колес; и средство управления силой торможения/движения, прикладываемой к каждому колесу средством приложения силы торможения/движения, таким образом, чтобы сила торможения/движения и момент вращения транспортного средства, создаваемые силами торможения/движения колес, становились целевой силой торможения/движения после модификации и целевым моментом вращения после модификации, при этом средство модификации подавляет изменение целевого момента вращения после модификации, происходящее, по меньшей мере, при изменении целевой силы торможения/движения в условиях, когда целевая сила торможения/движения и/или целевой момент вращения не могут быть достигнуты силами торможения/движения колес.
В соответствии с упомянутой выше конструкцией, даже когда целевая сила торможения/движения и/или целевой момент вращения не могут быть достигнуты силами торможения/движения колес, можно обеспечить силу торможения/движения и момент вращения, близкие к целевой силе торможения/движения и целевому моменту вращения. Кроме того, даже при резком изменении целевой силы торможения/движения можно предотвратить резкое изменение момента вращения транспортного средства, в результате чего может быть эффективным образом уменьшена вероятность ухудшения устойчивости движения транспортного средства или возникновения дискомфорта у пассажира или пассажиров этого транспортного средства.
В описанной выше конструкции, если скорость изменения целевой силы торможения/движения является высокой, степень подавления изменения целевого момента вращения после модификации может быть выше, чем в случае, когда скорость изменения целевой силы торможения/движения является небольшой.
В описанной выше конструкции степень подавления изменения целевого момента вращения после модификации может быть выше, когда скорость изменения целевой силы торможения/движения является высокой.
При использовании таких конструкций можно предотвратить чрезмерное подавление изменения целевого момента вращения после модификации, если скорость изменения целевой силы торможения/движения является небольшой, и можно эффективным образом предотвратить резкое изменение целевого момента вращения после модификации, если скорость изменения целевой силы торможения/движения является высокой.
В описанной выше конструкции средство модификации может подавлять изменение целевого момента вращения после модификации путем ограничения величины этого момента после модификации.
Такая конструкция гарантированно предотвращает чрезмерное увеличение величины целевого момента вращения после модификации, если скорость изменения целевой силы торможения/движения является высокой, в результате чего можно гарантированно предотвратить чрезмерное увеличение и последующее уменьшение величины целевого момента вращения после модификации.
В описанной выше конструкции средство модификации может подавлять изменение целевого момента вращения после модификации путем ограничения скорости изменения этого момента после модификации.
Эта конструкция может гарантированно предотвратить значительные изменения величины целевого момента вращения после модификации, даже когда скорость изменения целевой силы торможения/движения является высокой.
В описанной выше конструкции средство модификации может подавлять изменение целевого момента вращения после модификации, когда скорость изменения целевой силы торможения/движения не меньше эталонного значения для подавления.
В соответствии с этой конструкцией, когда скорость изменения целевой силы торможения/движения является небольшой и, следовательно, отсутствует вероятность значительного изменения целевого момента вращения после модификации даже при изменении целевой силы торможения/движения, можно гарантированно предотвратить не являющееся необходимым подавление изменения целевого момента вращения после модификации.
В описанной выше конструкции средство модификации может подавлять изменение целевого момента вращения после модификации путем ограничения величины этого момента после модификации до предельного значения, которое может быть меньше, когда величина скорости изменения целевой силы торможения/движения является высокой, по сравнению со случаем, когда величина скорости изменения целевой силы торможения/движения является небольшой.
В описанной выше конструкции средство модификации может подавлять изменение целевого момента вращения после модификации путем ограничения величины скорости изменения этого момента после модификации до предельной скорости изменения, которая может быть меньше, когда величина скорости изменения целевой силы торможения/движения является высокой, по сравнению со случаем, когда величина скорости изменения целевой силы торможения/движения является небольшой.
Согласно настоящему изобретению также создано устройство управления силой торможения/движения транспортного средства, содержащее средство приложения силы торможения/движения, которое выполнено с возможностью приложения силы торможения/движения к колесам; средство измерения характеристики движения, задаваемой водителем; средство вычисления целевой силы торможения/движения транспортного средства и целевого момента вращения транспортного средства, которые должны быть созданы силами торможения/движения колес, на основе, по меньшей мере, характеристики движения, задаваемой водителем; средство модификации целевой силы торможения/движения и/или целевого момента вращения таким образом, чтобы целевая сила торможения/движения после модификации и целевой момент вращения после модификации принимали значение, достижимое силами торможения/движения колес, когда целевая сила торможения/движения и целевой момент вращения не могут быть достигнуты силами торможения/движения колес; и средство управления силой торможения/движения, прикладываемой к каждому колесу средством приложения силы торможения/движения, таким образом, чтобы сила торможения/движения и момент вращения транспортного средства, создаваемые силами торможения/движения колес, становились целевой силой торможения/движения после модификации и целевым моментом вращения после модификации, где упомянутое средство модификации подавляет изменение целевого силы торможения/движения после модификации, происходящее, по меньшей мере, при изменении целевого момента вращения в условиях, когда целевая сила торможения/движения и/или целевой момент вращения не могут быть достигнуты силами торможения/движения колес.
В соответствии с описанной выше конструкцией, даже когда целевая сила торможения/движения и/или целевой момент вращения не могут быть достигнуты силами торможения/движения колес, можно обеспечить силу торможения/движения и момент вращения, близкие к целевой силе торможения/движения и целевому моменту вращения. Кроме того, даже при резком изменении целевого момента вращения можно предотвратить резкое изменение силы торможения/движения транспортного средства, в результате чего может быть эффективным образом уменьшена вероятность ухудшения устойчивости движения транспортного средства или возникновения дискомфорта у пассажира или пассажиров этого транспортного средства.
В описанной выше конструкции, если скорость изменения целевого момента вращения является высокой, степень подавления изменения целевой силы торможения/движения после модификации может быть выше, чем в случае, когда скорость изменения целевого момента вращения является небольшой.
В описанной выше конструкции степень подавления изменения целевой силы торможения/движения после модификации может быть выше, когда скорость изменения целевого момента вращения является высокой.
При использовании таких конструкций можно предотвратить чрезмерное подавление изменения целевой силы торможения/движения после модификации, если скорость изменения целевого момента вращения является небольшой, и можно эффективным образом предотвратить резкое изменение целевой силы торможения/движения после модификации, если скорость изменения целевого момента вращения является высокой.
В описанной выше конструкции средство модификации может подавлять изменение целевой силы торможения/движения после модификации путем ограничения величины этой силы после модификации.
Такая конструкция гарантированно предотвращает чрезмерное увеличение величины целевой силы торможения/движения после модификации, если скорость изменения целевого момента вращения является высокой, в результате чего можно гарантированно предотвратить чрезмерное увеличение и последующее уменьшение величины целевой силы торможения/движения после модификации.
В описанной выше конструкции средство модификации может подавлять изменение целевой силы торможения/движения после модификации путем ограничения скорости изменения этой силы торможения/движения после модификации.
Эта конструкция может гарантированно предотвратить значительные изменения величины целевой силы торможения/движения после модификации, даже когда скорость изменения целевого момента вращения является высокой.
В описанной выше конструкции средство модификации может подавлять изменения целевой силы торможения/движения после модификации, когда скорость изменения целевого момента вращения не меньше эталонного значения для подавления.
В соответствии с этой конструкцией, когда скорость изменения целевого момента вращения является небольшой и, следовательно, отсутствует вероятность значительного изменения целевой силы торможения/движения после модификации даже при изменении целевого момента вращения, можно гарантированно предотвратить не являющееся необходимым подавление изменения целевой силы торможения/движения после модификации.
В описанной выше конструкции средство модификации может подавлять изменение целевой силы торможения/движения после модификации путем ограничения величины этой силы торможения/движения после модификации до предельного значения, которое может быть меньше, когда величина скорости изменения целевого момента вращения является высокой, по сравнению со случаем, когда величина скорости изменения целевого момента вращения является небольшой.
В описанной выше конструкции средство модификации может подавлять изменение целевой силы торможения/движения после модификации путем ограничения величины скорости изменения этой силы торможения/движения после модификации до предельной скорости изменения, которая может быть меньше, когда величина скорости изменения целевого момента вращения является высокой, по сравнению со случаем, когда величина скорости изменения целевого момента вращения является небольшой.
В указанной выше конструкции, используя точку пересечения прямой линии, соединяющей точку, которая указывает целевую силу торможения/движения и целевой момент вращения, и точку начала координат, и линии, указывающей наибольшее значение силы торможения/движения и момента вращения транспортного средства, создаваемых силами торможения/движения колес, в качестве целевой точки прямоугольной системы координат, в которой координатными осями являются сила торможения/движения и момент вращения транспортного средства, средство модификации может присваивать целевой силе торможения/движения и целевому моменту вращения значения в упомянутой целевой точке.
При такой конструкции отношение силы торможения/движения и момента вращения транспортного средства гарантированно совпадает с отношением целевой силы торможения/движения и целевого момента вращения, и сила торможения/движения и момент вращения транспортного средства, создаваемые силами торможения/движения колес, принимают наибольшее значение, в результате чего могут быть достигнуты максимально возможные сила торможения/движения и момент вращения, необходимые транспортному средству, которые не выходят за пределы диапазонов силы торможения/движения, которая может быть создана колесами.
В описанной выше конструкции средство вычисления целевой силы торможения/движения и целевого момента вращения транспортного средства может вычислять целевую силу торможения/движения и целевой итоговый момент вращения, обеспечивающие устойчивое движение транспортного средства, на основе, по меньшей мере, характеристики движения, задаваемой водителем, оценивать момент вращения при повороте транспортного средства, обусловленный поперечной силой каждого колеса, на основе, по меньшей мере, характеристики движения, задаваемой водителем, и вычислять целевой момент вращения, вычитая момент вращения при повороте из целевого итогового момента вращения.
При такой конструкции целевая сила торможения/движения и целевой момент вращения транспортного средства, которые должны создаваться силами торможения/движения колес, могут быть гарантированы и правильно вычислены в точной пропорции на основе, по меньшей мере, характеристики движения, задаваемой водителем.
В описанных выше конструкциях средство приложения силы торможения/движения может независимо прикладывать силу торможения/движения к каждому колесу.
В описанных выше конструкциях средство приложения силы торможения/движения может независимо прикладывать силу торможения к каждому колесу, а также прикладывать силу движения от средства привода, являющегося общим для правых и левых колес, к правым и левым колесам таким образом, что распределение сил движения на правые и левые колеса является переменным.
В описанных выше конструкциях средство измерения характеристики движения, задаваемой водителем, может измерять величину ускорения или замедления либо величину поворота рулевой колонки, задаваемые водителем.
В описанных выше конструкциях линия, указывающая наибольшие значения силы торможения/движения и момента вращения транспортного средства, может быть определена наибольшим значением силы движения транспортного средства, наибольшим значением силы торможения транспортного средства, наибольшим значением момента вращения транспортного средства в направлении поворота влево и наибольшим значением момента вращения транспортного средства в направлении поворота вправо.
В описанных выше конструкциях линия, указывающая наибольшие значения силы торможения/движения и момента вращения транспортного средства может задаваться переменной в соответствии с коэффициентом трения дорожного покрытия.
В описанных выше конструкциях средства приложения силы торможения/движения может содержать средство приложения силы движения к каждому колесу независимо и средство приложения силы торможения к каждому колесу независимо.
В описанных выше конструкциях средство приложения силы торможения/движения может содержать средство приложения общей силы движения к правым и левым колесам, средство управления распределением силы движения на правые и левые колеса и средства приложения силы торможения к каждому колесу независимо.
В описанных выше конструкциях средство приложения силы движения может содержать средство приложения общей силы движения к правому и левому передним колесам и средство приложения общей силы движения к правому и левому задним колесам.
В описанных выше конструкциях средство приложения силы движения может содержать средство приложения общей силы движения к правому и левому передним колесам и правому и левому задним колесам, средство управления распределением силы движения на передние и задние колеса, средство управления распределением силы движения на правое и левое передние колеса и средство управления распределением силы движения на правое и левое задние колеса.
В описанных выше конструкциях средство приложения силы движения может содержать электродвигатель-генератор.
В описанных выше конструкциях электродвигатель-генератор может выполнять регенеративное торможение.
В описанных выше конструкциях средство вычисления целевой силы торможения/движения транспортного средства и целевого момента вращения транспортного средства может вычислять целевое продольное ускорение и целевую скорость вращения для устойчивого движения транспортного средства на основе, по меньшей мере, характеристики движения, задаваемой водителем, а также вычислять целевую силу торможения/движения транспортного средства и целевой итоговый момент вращения транспортного средства на основе целевого продольного ускорения и целевой скорости вращения.
В описанных выше конструкциях средство управления может вычислять целевую силу торможения/движения каждого колеса на основе целевой силы торможения/движения транспортного средства, целевого момента вращения транспортного средства и распределения силы торможения/движения на передние и задние колеса, а также управлять силой торможения/движения, прикладываемой к каждому колесу, на основе целевой силы торможения/движения каждого колеса.
Краткое описание чертежей
Фиг.1 - структурная схема устройства управления силой торможения/движения, предназначенного для четырехколесного полноприводного транспортного средства, относящегося к типу с электродвигателем в каждом колесе согласно первому варианту реализации настоящего изобретения.
Фиг.2 - вид для пояснения различных вариантов соотношения между силой торможения/движения каждого колеса и силой торможения/движения транспортного средства, а также соотношения между силой торможения/движения каждого колеса и моментом вращения транспортного средства.
Фиг.3 - блок-схема подпрограммы управления силой торможения/движения, исполняемой электронным контроллером для управления силой движения в первом варианте реализации настоящего изобретения.
Фиг.4 - блок-схема подпрограммы вычисления целевой силы Fvt торможения/движения после модификации и момента Mvt вращения после модификации на Этапе 100, в блок-схеме, показанной на Фиг.3.
Фиг.5А - график, иллюстрирующий диапазон, достигаемый за счет сил торможения/движения колес, для силы торможения/движения транспортного средства и момента вращения транспортного средства в первом варианте реализации настоящего изобретения.
Фиг.5В - вид, иллюстрирующий диапазон, достигаемый при управлении силами торможения/движения колес, для целевой силы Fvn торможения/движения транспортного средства и целевого момента Mvn вращения транспортного средства в транспортном средстве со средством привода только для правого и левого передних колес или для правого и левого задних колес в первом варианте реализации настоящего изобретения.
Фиг.6А и 6В - виды, иллюстрирующие порядок вычисления целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации в случае, когда целевая сила Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства выходит за пределы диапазона, достигаемого при управлении силами торможения/движения колес в первом варианте реализации настоящего изобретения.
Фиг.6С - вид, иллюстрирующий работу устройства в первом варианте реализации настоящего изобретения, когда происходит смена точки, указывающей целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, с точки Р1 на точку Р2 при изменении целевой силы Fvn торможения/движения транспортного средства.
Фиг.7А и 7В - виды, иллюстрирующие порядок вычисления целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации в случае, когда целевая сила Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства выходит за пределы диапазона, достигаемого при управлении силами торможения/движения колес в первом варианте реализации настоящего изобретения.
Фиг.7С - вид, иллюстрирующий работу устройства в первом варианте реализации настоящего изобретения, когда происходит смена точки, указывающей целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, с точки Р1 на точку Р2 при изменении целевого момента Mvn вращения транспортного средства.
Фиг.8 - график, иллюстрирующий взаимосвязь между абсолютным значением скорости Fvnd изменения целевой силы Fvn торможения/движения и предельным значением Mlim целевого момента Mvt вращения транспортного средства.
Фиг.9 - график, иллюстрирующий взаимосвязь между абсолютным значением скорости Mvnd изменения целевого момента Mvn вращения и предельным значением Flim целевой силы Fvt торможения/движения транспортного средства.
Фиг.10 - структурная схема устройства управления силой торможения/движения, примененного для четырехколесного полноприводного транспортного средства, в котором силой движения и силой регенеративного торможения, создаваемой одним электродвигателем-генератором, общим для четырех колес, управляют таким образом, чтобы они распределялись на четыре колеса согласно второму варианту реализации настоящего изобретения.
Фиг.11 - вид для пояснения различных вариантов соотношения между силой торможения/движения каждого колеса и силой торможения/движения транспортного средства, а также соотношения между силой торможения/движения каждого колеса и моментом вращения транспортного средства во втором варианте реализации настоящего изобретения.
Фиг.12 - вид для пояснения других различных вариантов соотношения между силой торможения/движения каждого колеса и силой торможения/движения транспортного средства, а также соотношения между силой торможения/движения каждого колеса и моментом вращения транспортного средства во втором варианте реализации настоящего изобретения.
Фиг.13 - блок-схема подпрограммы вычисления целевой силы Fvt торможения/движения после модификации и момента Mvt вращения после модификации, обеспечиваемых электронным контроллером для управления силой движения во втором варианте реализации настоящего изобретения.
Фиг.14 - график, иллюстрирующий взаимосвязь между абсолютным значением скорости Mvnd изменения целевого момента Mvn вращения и предельными значениями Fdlim и Fblim целевой силы Fvt торможения/движения транспортного средства.
Фиг.15А - график, иллюстрирующий диапазон, достигаемый за счет сил торможения/движения колес, для силы торможения/движения транспортного средства и момента вращения транспортного средства во втором варианте реализации настоящего изобретения.
Фиг.15В - вид, иллюстрирующий диапазон, достигаемый при управлении силами торможения/движения колес, для целевой силы Fvn торможения/движения транспортного средства и целевого момента Mvn вращения транспортного средства в транспортном средстве со средством привода только для правого и левого передних колес или для правого и левого задних колес во втором варианте реализации настоящего изобретения.
Фиг.16А и 16В - виды, иллюстрирующие порядок вычисления целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации в случае, когда целевая сила Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства выходит за пределы диапазона, достигаемого при управлении силами торможения/движения колес во втором варианте реализации настоящего изобретения.
Фиг.16С - вид, иллюстрирующий работу устройства во втором варианте реализации настоящего изобретения, когда происходит смена точки, указывающей целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, с точки Р1 на точку Р2 при изменении целевой силы Fvn торможения/движения транспортного средства.
Фиг.17А и 17В - виды, иллюстрирующие порядок вычисления целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации в случае, когда целевая сила Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства выходит за диапазон, достигаемый при управлении силами торможения/движения колес во втором варианте реализации настоящего изобретения.
Фиг.17С - вид, иллюстрирующий работу устройства во втором варианте реализации настоящего изобретения, когда происходит смена точки, указывающей целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, с точки Р1 на точку Р2 при изменении целевого момента Mvn вращения транспортного средства.
Фиг.18 - блок-схема подпрограммы вычисления целевой силы Fvt торможения/движения после модификации и момента Mvt вращения после модификации, обеспечиваемых электронным контроллером для управления силой движения в третьем варианте реализации настоящего изобретения.
Фиг.19 - график, иллюстрирующий взаимосвязь между абсолютным значением скорости Fvnd изменения целевой силы Fvn торможения/движения и предельного значения ΔMlim изменения целевого момента Mvt вращения транспортного средства. и
Фиг.20 - график, иллюстрирующий взаимосвязь между абсолютным значением скорости Mvnd изменения целевого момента Mvn вращения и предельного значения ΔFlim изменения целевой силы Fvt торможения/движения транспортного средства.
Наилучшие способы реализации изобретения
Далее со ссылкой на прилагаемые чертежи будут подробно рассмотрены некоторые предпочтительные варианты реализации настоящего изобретения.
Первый вариант
Фиг.1 представляет собой структурную схему устройства управления силой торможения/движения, предназначенного для четырехколесного полноприводного транспортного средства, относящегося к типу с электродвигателем в каждом колесе, согласно первому варианту реализации настоящего изобретения.
На Фиг.1 ссылочными позициями 10FL и 10FR соответственно обозначены левое и правое передние колеса, являющиеся поворачивающими, а позициями 10RL и 10RR соответственно обозначены левое и правое задние колеса, не являющиеся поворачивающими. Электродвигатели-генераторы 12FL и 12FR, являющиеся внутриколесными электродвигателями, встроены соответственно в левое и правое передние колеса 10FL и 10FR, в результате чего левое и правое передние колеса 10FL и 10FR приводятся в действие электродвигателями-генераторами 12FL и 12FR. Электродвигатели-генераторы 12FL и 12FR также работают как регенеративные генераторы индивидуально для левого и правого передних колес при торможении, таким образом создавая силу регенеративного торможения.
Аналогичным образом электродвигатели-генераторы 12RL и 12RR являются внутриколесными электродвигателями, встроенными соответственно в левое и правое передние колеса 10RL и 10RR, в результате чего левое и правое передние колеса 10RL и 10RR приводятся в действие электродвигателями-генераторами 12RL и 12RR. Электродвигатели-генераторы 12RL и 12RR также работают как регенеративные генераторы индивидуально для левого и правого задних колес при торможении, таким образом, создавая силу регенеративного торможения.
Силой движения от каждого электродвигателя-генератора 12FL-12RR управляет электронный контроллер 16 для управления силой движения исходя из степени φ открытия акселератора, представляющей собой уровень нажатия на педаль акселератора, не показанную на Фиг.1, которая измеряется датчиком 14 открытия акселератора. Электронный контроллер 16 для управления силой движения также управляет силой регенеративного торможения от каждого из электродвигателей-генераторов 12FL-12RR.
Хотя это подробно и не показано на Фиг.1, электронный контроллер 16 для управления силой движения состоит из микрокомпьютера и схемы управления, при этом микрокомпьютер может иметь обычную архитектуру и включать в себя, например, центральный процессор (ЦП), ПЗУ, ОЗУ и устройство ввода-вывода, которые соединены друг с другом посредством двунаправленной общей шины. При нормальной езде электроэнергия от аккумулятора, который на Фиг.1 не показан, поступает в каждый из электродвигателей-генераторов 12FL-12RR, а при замедлении и торможении транспортного средства электроэнергия, созданная при регенеративном торможении каждым из электродвигателей-генераторов 12FL-12RR, поступает в аккумулятор через схему управления.
Силами торможения за счет трения левого и правого передних колес 10FL и 10FR, а также левого и правого задних колес 10RL и 10RR путем управления давлениями торможения в соответствующих колесных цилиндрах 22FL, 22FR, 22RL и 22RR управляет гидравлическая схема 20, расположенная в устройстве 18 торможения за счет трения. Хотя это и не показано на чертеже, гидравлическая схема 20 включает в себя резервуар, масляный насос и различные клапанные устройства. В нормальной ситуации давлением торможения в каждом колесном цилиндре управляют в соответствии с величиной нажатия на педаль 24 тормоза водителем и давлением в основном цилиндре 26, который приводится в действие в соответствии с нажатием на педаль 24 тормоза. Управление осуществляется, как это необходимо, электронным контроллером 28 для управления силой торможения посредством управления масляным насосом или различными клапанными устройствами, вне зависимости от величины нажатия на педаль 24 тормоза водителем.
Хотя это подробно и не показано на Фиг.1, электронный контроллер 28 для управления силой торможения также состоит из микрокомпьютера и схемы управления, при этом микрокомпьютер может иметь обычную архитектуру и включать в себя, например, центральный процессор, ПЗУ, ОЗУ и устройство ввода-вывода, которые соединены друг с другом посредством двунаправленной общей шины.
В электронный контроллер 16 для управления силой движения вводится сигнал, указывающий коэффициент µ трения дорожного покрытия, от датчика 30 коэффициента µ трения; сигнал, указывающий угол θ поворота руля, от датчика 32 угла поворота руля; и сигнал, указывающий скорость V транспортного средства от датчика 34 скорости транспортного средства, в дополнение к сигналу, указывающему степень φ открытия акселератора, от датчика 14 открытия акселератора. В электронный контроллер 28 для управления силой торможения вводится сигнал, указывающий давление Pm в основном цилиндре от датчика 36 давления и сигналы, указывающие давления Pbi торможения (давления в колесных цилиндрах; i=fl, fr, rl, rr) соответствующих колес, от датчиков давления 38FL-38RR. Электронный контроллер 16 для управления силой движения и электронный контроллер 28 для управления силой торможения обмениваются друг с другом сигналами в соответствии с необходимостью. Отметим что датчик 32 угла поворота руля определяет угол θ поворота руля при повороте транспортного средства влево как положительный.
Электронный контроллер 16 для управления силой движения вычисляет целевое продольное ускорение Gxt транспортного средства на основе степени φ открытия акселератора и давления Pm в основном цилиндре, которые показывают величину ускорения/замедления, выполняемых водителем, и вычисляет целевую скорость γt вращения транспортного средства на основе угла θ поворота руля, который представляет собой величину рулевого управления, осуществляемого водителем, и скорости V транспортного средства с использованием способа, хорошо известного в данной области техники. Затем электронный контроллер 16 для управления силой движения вычисляет целевую силу Fvn торможения/движения, необходимую транспортному средству на основе целевого продольного ускорения Gxt транспортного средства, а также вычисляет целевой итоговый момент Mvnt вращения, необходимый транспортному средству, на основе целевой скорости γt вращения транспортного средства.
Электронный контроллер 16 для управления силой движения вычисляет угол β буксования транспортного средства с использованием способа, хорошо известного в данной области техники, вычисляет угол α буксования левого и правого передних колес на основе угла β буксования транспортного средства и угла θ поворота руля и вычисляет момент Ms вращения при повороте транспортного средства, обусловленный поперечной силой каждого колеса, на основе угла α буксования. Затем электронный контроллер 16 для управления силой движения вычисляет величину целевого момента Mvn вращения, необходимого транспортному средству и достигаемого посредством управления силой торможения/движения каждого колеса, путем вычитания момента вращения Ms при повороте из целевого итогового момента Mvnt вращения транспортного средства.
Электронный контроллер 16 для управления силой движения далее вычисляет максимальную силу Fvdmax движения и максимальную силу Fvbmax торможения транспортного средства, обеспечиваемые силами торможения/движения колес, на основе коэффициента µ трения дорожного покрытия, а также вычисляет максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево и максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо, обеспечиваемые силами торможения/движения колес, на основе коэффициента µ трения дорожного покрытия.
Как показано на Фиг.2А, если предположить, что вертикальная нагрузка и коэффициенты трения дорожного покрытия для колес являются одинаковыми, и размеры окружностей трения колес являются одинаковыми, то максимальная сила Fvdmax движения транспортного средства при условии, что момент вращения, создаваемый силами торможения/движения колес не влияет на транспортное средство, обеспечивается, когда силы Fwxfl и Fwxfr торможения/движения левого и правого передних колес 10FL и 10FR являются максимальными силами Fwdflmax и Fwdfrmax движения, а силы Fwxrl и Fwxrr торможения/движения левого и правого задних колес 10RL и 10RR являются максимальными силами Fwdrlmax и Fwdrrmax движения. Аналогичным образом, как показано на Фиг.2В, максимальная сила Fvbmax торможения транспортного средства при условии, что момент вращения, создаваемый силами торможения/движения колес не влияет на транспортное средство, обеспечивается, когда силы Fwxfl и Fwxfr торможения/движения левого и правого передних колес 10FL и 10FR являются максимальными силами Fwbflmax и Fwbfrmax торможения, а силы Fwxrl и Fwxrr торможения/движения левого и правого задних колес 10RL и 10RR являются максимальными силами Fwbrlmax и Fwbrrmax торможения.
Как показано на Фиг.2С, максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево при условии, что продольная сила, создаваемая силами торможения/движения колес не влияет на транспортное средство, обеспечивается, когда силы Fwxfl и Fwxrl торможения/движения переднего левого и заднего левого колес 10FL и 10RL являются максимальными силами Fwbflmax и Fwbrlmax торможения, а силы Fwxfr и Fwxrr торможения/движения переднего правого и заднего правого колес 10FR и 10RR являются максимальными силами Fwdfrmax и Fwdrrmax движения. Аналогичным образом, как показано на Фиг.2D, максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо при условии, что продольная сила, создаваемая силами торможения/движения колес не влияет на транспортное средство, обеспечивается, когда силы Fwxfl и Fwxrl торможения/движения переднего левого и заднего левого колес 10FL и 10RL являются максимальными силами Fwdflmax и Fwdrlmax движения, а силы Fwxfr и Fwxrr торможения/движения переднего правого и заднего правого колес 10FR и 10RR являются максимальными силами Fwbfrmax и Fwbrrmax торможения.
В случае, когда выходной крутящий момент каждого из электродвигателей-генераторов 12FL-12RR является достаточно высоким, максимальная сила движения и максимальная сила торможения каждого колеса определяются коэффициентом µ трения дорожного покрытия, в результате чего, если направление ускорения и направление поворота влево транспортного средства задать как положительное, устанавливаются следующие соотношения между максимальной силой движения и максимальной силой торможения каждого колеса, максимальной силой движения и максимальной силой торможения транспортного средства, а также максимальным моментом вращения в направлении поворота влево и максимальным моментом вращения в направлении поворота вправо.
Fwdflmax=Fwdfrmax=-Fwbflmax=-Fwbfrmax
Fwdrlmax=Fwdrrmax=-Fwbrlmax=-Fwbrrmax
Fvdmax=-Fvbmax
Mvlmax=-Mvrmax
Так как максимальная сила Fwdimax движения и максимальная сила Fwbimax торможения (i=fl, fr, rl, rr) каждого колеса определяется коэффициентом µ трения дорожного покрытия, то максимальная сила Fvdmax движения транспортного средства, максимальная сила Fvbmax торможения транспортного средства, максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево и максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо также определяются упомянутым коэффициентом трения. Соответственно, если найден коэффициент μ трения дорожного покрытия, то можно оценить максимальную силу Fvdmax движения транспортного средства и другие упомянутые выше величины.
Как показано на Фиг.5А в прямоугольной системе координат, в которой абсциссой является сила Fvx торможения/движения транспортного средства, а ординатой является момент Mv вращения транспортного средства, эти сила и момент, которые могут достигаться путем управления силой торможения/движения каждого колеса, принимают значения в пределах четырехугольника 100 в виде ромба, образуемого максимальной силой Fvdmax движения, максимальной силой Fvbmax торможения, максимальным моментом Mvlmax вращения в направлении поворота влево и максимальным моментом Mvrmax в направлении поворота вправо.
Отметим, что на Фиг.5 точки А-D соответствуют случаям A-D на Фиг.2, где координаты в точках A-D соответственно (Fvdmax, 0), (Fvbmax, 0), (0, Mvlmax) и (0, Mvrmax). Как показано пунктирной линией на Фиг.5А, четырехугольник 100 уменьшается при снижении коэффициента µ трения дорожного покрытия. Кроме того, при увеличении угла θ поворота руля поперечная сила переднего левого и переднего правого колес, которые являются поворачивающими, увеличивается, в результате чего норма продольной силы становится небольшой. Таким образом, четырехугольник 100 уменьшается при возрастании величины угла θ поворота руля.
Если предположить, что коэффициент продольного распределения силы Fv торможения/движения на задние колеса задается как Kr (константа, 0<Kr<1), а ширина колеи транспортного средства задается как Tr, выполняются приведенные ниже уравнения 1-3. Соответственно электронный контроллер 16 для управления силой движения задает целевую силу Fvt торможения/движения и целевой момент Mvt вращения транспортного средства, обеспечиваемые за счет управления силами торможения/движения каждого колеса, равными целевой силе Fvn торможения/движения и целевому моменту Mvn вращения транспортного средства, когда целевая сила Fvn торможения/движения и целевой момент Mvn вращения находятся в пределах упомянутого выше четырехугольника 100. Например, он вычисляет значения, удовлетворяющие приведенным ниже уравнениями 1-3, как целевые силы Fwxti торможения/движения (i=fl, fr, rl, rr) колес методом наименьших квадратов.
Fwxfl+Fwxfr+Fwxrl+Fwxrr=Fvt (1)
{Fwxfr+Fwxrr-(Fwxfl+Fwxrl)}Tr/2=Mvt (2)
(Fwxfl+Fwxfr)Kr=(Fwxrl+Fwxrr)(1-Kr) (3)
Когда целевая сила Fvn торможения/движения и целевой момент Mvn вращения транспортного средства выходят за пределы диапазона упомянутого выше четырехугольника 100, электронный контроллер 16 для управления силой движения вычисляет целевую силу Fvt торможения/движения и целевой момент Mvt вращения транспортного средства таким образом, чтобы величина силы Fv торможения/движения и величина момента Mv вращения, обеспечиваемых целевыми силами Fwxti торможения/движения колес, становились соответственно максимальными в пределах диапазона, в котором соотношение целевой силы Fvt торможения/движения и момента Mvt вращения, обеспечиваемых силами торможения/движения колес, становится соотношением целевой силы Fvm торможения/движения и целевого момента Mvn вращения, необходимых транспортному средству и обеспечиваемых силами торможения/движения колес. Затем электронный контроллер 16 для управления силой движения вычисляет значения, удовлетворяющие приведенным выше уравнениям 1-3 в качестве целевых сил Fwxti торможения/вращения колес, например, при помощи метода наименьших квадратов.
В частности, электронный контроллер 16 для управления силой движения вычисляет предельное значение Mlim целевого момента Mvt вращения на основе величины скорости изменения целевой силы Fvn торможения/движения таким образом, чтобы когда эта величина является высокой, предельное значение Mlim целевого момента Mvt вращения становилось небольшим, а также вычисляет предельные значения Flim целевой силы Fvt торможения/движения на основе величины скорости изменения целевого момента Mvn вращения таким образом, чтобы когда эта величина является высокой, предельное значение Flim целевой силы Fvt торможения/движения становилось небольшим.
Когда величина целевого момента Mvt вращения после модификации превышает предельное значение Mlim, электронный контроллер 16 для управления силой движения корректирует величину целевого момента Mvt вращения до предельного значения Mlim. Когда величина целевой силы Fvt торможения/движения после модификации превышает предельное значение Flim, электронный контроллер 16 для управления силой движения корректирует величину целевой силы Fvt торможения/движения до предельного значения Flim. Таким образом, эта схема предотвращает резкое изменение в увеличении или уменьшении целевой силы Fvt торможения/движения или целевого момента Mvt вращения при резком изменении целевой силы Fvn торможения/движения или целевого момента Mvn вращения.
Когда целевая сила Fwxti торможения/движения каждого колеса принимает положительное значение, означающее, что она является силой движения, электронный контроллер 16 для управления силой движения задает целевую силу торможения за счет сил Fwbti трения и целевую силу Fwrti регенеративного торможения (i=fl, fr, rl, rr) каждого колеса, равную нулю, выводит сигналы, указывающие целевые силы торможения за счет сил Fwbti трения в электронный контроллер 28 для управления силой торможения, задает целевую силу Fwdti движения (i=fl, fr, rl, rr) каждого колеса, равной соответствующей целевой силе Fwxti торможения/движения, вычисляет целевые токи Iti движения (i=fl, fr, rl, rr) для электродвигателей-генераторов 12FL-12RR с использованием не показанных таблиц или функций на основе целевых сил Fwdti движения и управляет токами движения, подаваемыми на электродвигатели-генераторы 12FL-12RR на основе целевых токов Iti движения, в результате управляя силой движения каждого колеса таким образом, что сила Fwxi торможения/движения каждого колеса становится соответствующей целевой силой Fwxti торможения/движения.
С другой стороны, когда целевые силы Fwxti торможения/движения каждого колеса принимают отрицательное значение, означающее, что целевая сила Fwxti торможения/движения является силой торможения, а целевая сила Fwxti торможения/движения не является более максимальной силой регенеративного торможения каждого колеса, электронный контроллер 16 для управления силой движения задает целевую силу Fwdti движения и целевую силу торможения за счет сил Fwbti трения каждого колеса, равной нулю, задает целевую силу Fwrti регенеративного торможения, равной целевой силе Fwxti торможения/движения, и управляет электродвигателями-генераторами 12FL-12RR таким образом, что сила регенеративного торможения становится целевой силой Fwrti регенеративного торможения.
Когда целевая сила Fwxti торможения/движения каждого колеса принимает отрицательное значение, означающее, что целевая сила Fwxti торможения/движения является силой торможения, а целевая сила Fwxti торможения/движения превышает максимальную силу регенеративного торможения каждого колеса, электронный контроллер 16 для управления силой движения задает целевую силу Fwdti движения каждого колеса, равную нулю, задает целевую силу Fwrti регенеративного торможения каждого колеса, равной максимальной силе Fwxrimax регенеративного торможения (i=fl, fr, rl, rr), и управляет электродвигателями-генераторами 12FL-12RR таким образом, что сила регенеративного торможения становится максимальной силой Fwxrimax регенеративного торможения. Далее он вычисляет силу торможения, которая соответствует разнице между целевой силой Fwxti торможения/движения и максимальной силой Fwxrimax регенеративного торможения как целевую силу торможения за счет сил Fwbti трения (i=fl, fr, rl, rr), и выводит сигналы, указывающие целевые силы торможения за счет сил Fwbti трения колес, в электронный контроллер 28 для управления силой торможения.
Электронный контроллер 28 для управления силой торможения вычисляет целевое давление Pbti торможения (i=fl, fr, rl, rr) каждого колеса на основе целевой силы торможения за счет сил Fwbti трения каждого колеса, поступившей от электронного контроллера 16 для управления силой движения, и управляет гидравлической схемой 20 таким образом, что давление Pbi торможения каждого колеса становится соответствующим целевым давлением Pbti торможения, а сила торможения за счет сил Fwbi трения (i=fl, fr, rl, rr) каждого колеса таким образом становится соответствующей целевой силой торможения за счет сил Fwbti трения каждого колеса.
Далее со ссылкой на блок-схему, показанную на Фиг.3, будет рассмотрено управление силой торможения/движения, обеспечиваемое электронным контроллером 16 для управления силой движения в первом варианте реализации настоящего изобретения. Процесс управления в блок-схеме, показанной на Фиг.3, начинается с включения электронного контроллера 16 для управления силой движения и многократно выполняется через заданный промежуток времени, до тех пор, пока не будет выключено зажигание при помощи замка зажигания, который не показан.
На Этапе 10 сначала считываются сигналы, указывающие степень φ открытия акселератора, измеренную датчиком 14 открытия акселератора и т.п. На Этапе 20 упомянутым выше способом на основе степени φ открытия акселератора и т.п. вычисляются целевая сила Fvn торможения/движения и целевой момент Mvn вращения, необходимые транспортному средству и создаваемые путем управления силой торможения/движения каждого колеса.
На Этапе 30 при помощи непоказанных таблиц или функций на основе коэффициента µ трения дорожного покрытия вычисляются максимальная сила Fvdmax движения транспортного средства, максимальная сила Fvbmax торможения транспортного средства, максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево и максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо, достижимые силой торможения/движения каждого колеса. А именно, задаются точки А-D, показанные на Фиг.5.
На Этапе 40 определяется, находятся ли целевая сила Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства в пределах диапазона четырехугольника 100 и целевой силы Fvn торможения/движения, т.е. может ли быть достигнут целевой момент Mvn вращения путем управления силами торможения/движения колес. В случае отрицательного результата происходит переход на Этап 100. В случае положительного результата на Этапе 50 целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации задаются равными целевой силе Fvn торможения/движения и целевому моменту Mvn вращения соответственно, после чего происходит переход на Этап 200.
На Этапе 100 на основе целевой силы Fvn торможения/движения и целевого момента Mvn вращения в соответствии с блок-схемой, показанной на Фиг.4, вычисляются целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации. После чего происходит переход на Этап 200.
На Этапе 200 на основе целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации упомянутым выше способом вычисляется целевая сила Fwxti торможения/движения (i=fl, fr, rl, rr) каждого колеса для достижения целевой силы Fvt торможения/движения и целевого момента Mvt вращения.
На Этапе 210 упомянутым выше способом вычисляется целевая сила торможения за счет сил Fwbti трения, и сигналы, указывающие эту силу, выводятся в электронный контроллер 28 для управления силой торможения, в результате чего электронный контроллер 28 для управления силой торможения осуществляет управление таким образом, что сила торможения за счет сил Fwbi трения каждого колеса становится соответствующей целевой силой торможения за счет сил Fwbti трения.
На Этапе 220 каждым из электродвигателей-генераторов 12FL-12RR управляют таким образом, чтобы сила движения Fwdi или сила регенеративного торможения Fwri каждого колеса соответственно становилась целевой силой Fwdti движения или целевой силой Fwrti регенеративного торможения.
Далее со ссылкой на блок-схему, показанную на Фиг.4, рассмотрена подпрограмма вычисления целевой силы Fvt торможения/движения и момента Mvt вращения после модификации на описанном выше Этапе 100, т.е. подпрограмма вычисления целевой силы Fvt торможения/движения и момента Mvt вращения после модификации при условии, что целевая сила Fvn торможения/движения и целевой момент Mvn вращения не могут быть достигнуты силами торможения/движения колес.
На Этапе 105 в качестве целевой точки, как показано на Фиг.6А и 7А, получают точку пересечения Q отрезка L, соединяющего точку Р, которая показывает целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, и начало координат О с контуром четырехугольника 100, и если координата целевой точки Q задана как (Fvq, Mvq), целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации задаются равными Fvq и Mvq соответственно. Затем происходит переход на Этап 200.
На Этапе 110 как дифференцированное по времени значение целевой силы Fvn торможения/движения транспортного средства вычисляется скорость Fvnd изменения целевой силы Fvn торможения/движения, и на основе абсолютного значения скорости Fvnd изменения целевой силы Fvn торможения/движения из таблицы, соответствующей графику, показанному на Фиг.8, вычисляется предельное значение Mlim целевого момента Mvt вращения транспортного средства. Следует отметить, что на Фиг.8, если абсолютное значение скорости Fvnd изменения целевой силы Fvn торможения/движения не превышает эталонного значения для подавления Fvndo, предельное значение Mlimo является постоянной величиной, превышающей величины наибольших моментов Mvlmax и Mvrmax вращения.
На Этапе 115 как дифференцированное по времени значение целевого момента Mvn вращения транспортного средства вычисляется скорость Mvnd изменения целевого момента Mvn вращения, и на основе абсолютного значения скорости Mvnd изменения целевого момента Mvn вращения из таблицы, соответствующей графику, показанному на Фиг.9, вычисляется предельное значение Flim целевой силы Fvt торможения/движения транспортного средства. Следует отметить, что согласно Фиг.9, если абсолютное значение скорости Mvnd изменения целевого момента Mvn вращения не превышает эталонного значения Mvndo для подавления, предельное значение Flimo является постоянной величиной, превышающей величины наибольших сил Fvdmax и Fvbmax торможения/движения.
На Этапе 120 определяется, превышает ли абсолютное значение целевого момента Mvt вращения транспортного средства после модификации предельное значение Mlim. В случае отрицательного результата происходит переход на Этап 130, а в случае положительного результата на Этапе 125 целевой момент Mvt вращения транспортного средства после модификации корректируется до signMvt·Mlim, где signMvt задается как знак целевого момента Mvt вращения транспортного средства. После чего происходит переход на Этап 130.
Например, в ситуации, показанной на Фиг.6. В целевая сила Fvt торможения/движения транспортного средства после модификации поддерживается на таком уровне, чтобы иметь величину Fvq в координате целевой точки Q, но целевой момент Mvt вращения транспортного средства после модификации корректируется до Mlim. Таким образом, целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации задаются равными значениям координат в точке Q' пересечения перпендикуляра, опущенного на прямую линию предельного значения Mlim из целевой точки Q.
На Этапе 130 определяется, превышает ли абсолютное значение целевой силы Fvt торможения/движения транспортного средства после модификации предельное значение Flim. В случае отрицательного результата происходит переход на Этап 200, а в случае положительного результата на Этапе 135 целевая сила Fvt торможения/движения транспортного средства после модификации корректируется до signFvt·Flim, где signFvt задается как знак целевой силы Fvt торможения/движения транспортного средства. Затем происходит переход на Этап 200.
Например, в ситуации, показанной на Фиг.7В, целевой момент Mvt вращения транспортного средства после модификации поддерживается на таком уровне, чтобы иметь величину Mvq в координате целевой точки Q, хотя целевая сила Fvt торможения/движения транспортного средства после модификации корректируется до Flim. Таким образом, целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации задаются равными значениям координат в точке Q' пересечения перпендикуляра, опущенного на прямую линию предельного значения Flim из целевой точки Q.
Согласно приведенному первому варианту реализации настоящего изобретения целевая сила Fvn торможения/движения и целевой момент Mvn вращения, необходимые транспортному средству и достигаемые путем управления силами торможения/движения колес, вычисляются на Этапе 20, максимальная сила Fvdmax движения транспортного средства, максимальная сила Fvbmax торможения транспортного средства, максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево и максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо, которые достижимы силами торможения/движения колес, вычисляются на Этапе 30, а на Этапе 40 определяется, могут ли быть достигнуты целевая сила Fvn торможения/движения и целевой момент Mvn вращения за счет управления силами торможения/движения колес.
Если на Этапе 40 определено, что целевая сила Fvn торможения/движения и целевой момент Mvn вращения не могут быть достигнуты за счет управления силами торможения/движения колес, выполняется этап 100, т.е. этапы 105-135, в результате чего целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации вычисляются как значения, достижимые силами торможения/движения колес.
На этапе 105 в качестве целевой точки получают точку пересечения Q отрезка L, соединяющего точку Р, которая показывает целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, и начало координат О с контуром четырехугольника 100, и целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации задаются равными Fvq и Mvq соответственно, которые являются значениями в точке Q. На Этапе 110 на основе абсолютного значения скорости Fvnd изменения целевой силы Fvt торможения/движения транспортного средства вычисляется предельное значение Mlim целевого момента Mvt вращения транспортного средства. На Этапе 115 на основе абсолютного значения скорости Mvnd изменения целевого момента Mvt вращения транспортного средства вычисляется предельное значение Flim целевой силы Fvt торможения/движения транспортного средства. Если величины целевой силы Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации превышают соответственно предельные значения Flim и Mlim, эти величины ограничиваются до предельных значений на Этапах 120-135.
Следовательно, согласно приведенному первому варианту реализации настоящего изобретения, если транспортное средство находится в ситуации, когда целевая сила Fvn торможения/движения и целевой момент Mvn вращения не могут быть достигнуты за счет управления силой торможения/движения каждого колеса, вычисляются целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации таким образом, чтобы в пределах диапазона, в котором отношение целевой силы Fvt торможения/движения и целевого момента после модификации, достигаемых за счет управления силами торможения/движения колес, совпадает с отношением целевой силы Fvn торможения/движения и целевого момента Mvn вращения, достигаемых за счет управления силами торможения/движения колес и необходимых транспортному средству, сила Fv торможения/движения и момент Mv вращения, обеспечиваемые целевыми силами Fwxti торможения/движения колес, принимают наибольшие значения. Следовательно, силами торможения/движения колес управляют таким образом, чтобы отношение силы торможения/движения и момента вращения гарантированно совпадало с отношением целевой силы торможения/движения и целевого момента вращения, в результате чего могут быть достигнуты сила торможения/движения и момент вращения, необходимые транспортному средству, которые максимально возможны в пределах диапазона сил торможения/движения, которые могут быть созданы колесами.
Кроме того, предотвращается ситуация, когда целевой момент Mvt вращения транспортного средства после модификации и/или целевая сила Fvt торможения/движения транспортного средства после модификации резко изменяются при увеличении или уменьшении, даже если целевая сила Fvn торможения/движения и/или целевой момент Mvn вращения резко изменяются из-за резкого ускорения или замедления и/или резкого поворота руля, выполняемых водителем. Таким образом, может быть эффективным образом уменьшена вероятность ухудшения устойчивости при движении транспортного средства или появления дискомфорта у пассажиров, которые обусловлены резким изменением при увеличении и уменьшении момента вращения и/или силы торможения/движения транспортного средства.
Рассмотрим, например, случай, когда целевая сила Fvn торможения/движения резко изменяется с постоянной скоростью из-за резкого ускорения или замедления, выполняемых водителем, и происходит смена точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения, с P1 на Р2, как показано на Фиг.6С. Когда изменения целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации не ограничиваются, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q1→C→Q2 вдоль контура четырехугольника 100. При таком перемещении момент вращения транспортного средства резко увеличивается или уменьшается.
С другой стороны, согласно приведенному первому варианту реализации настоящего изобретения целевой момент Mvt вращения транспортного средства после модификации ограничивается таким образом, чтобы не превышать предельное значение Mlim. Следовательно, даже при резком изменении целевой силы Fvn торможения/движения из-за резкого ускорения или замедления, выполняемого водителем, и когда происходит смена точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения, с Р1 на Р2, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q1→R1→Q2, в результате чего можно гарантированно обеспечить резкое увеличение или уменьшение момента вращения транспортного средства.
Аналогичным образом, рассмотрим, например, случай, когда целевой момент Mvn вращения резко изменяется из-за резкого поворота руля водителем, и происходит смена точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения, с P1 на Р2, как показано на Фиг.7С. Когда изменения целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации не ограничиваются, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q1→А→Q2 вдоль контура четырехугольника 100. При таком перемещении момент вращения транспортного средства резко увеличивается или уменьшается.
С другой стороны, согласно приведенному первому варианту реализации настоящего изобретения целевая сила Fvt торможения/движения транспортного средства после модификации ограничивается таким образом, чтобы не превышать предельное значение Flim. Следовательно, даже при резком изменении целевого момента Mvn вращения из-за резкого поворота руля водителем, и когда происходит смена точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения, с Р1 на Р2, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q1→R1→R2, в результате чего можно гарантированно предотвратить резкое увеличение или уменьшение силы торможения/движения транспортного средства.
В частности, согласно приведенному первому варианту реализации настоящего изобретения предельное значение Mlim задается переменным, в соответствии с абсолютным значением скорости Fvnd изменения целевой силы Fvn торможения/движения, так чтобы оно понижалось при увеличении абсолютного значения скорости Fvnd изменения целевой силы Fvn торможения/движения, как показано на Фиг.8. Предельное значение Flim задается переменным, в соответствии с абсолютным значением скорости Mvnd изменения целевого момента Mvn вращения, так чтобы оно понижалось при увеличении абсолютного значения скорости Mvnd изменения целевого момента Mvn вращения, как показано на Фиг.9. Следовательно, когда вероятность резкого увеличения или уменьшения момента вращения или силы торможения/движения транспортного средства является высокой, накладывается более строгое ограничение на целевой момент Mvt вращения транспортного средства после модификации и целевую скорость Fvt торможения/движения транспортного средства после модификации. Соответственно, когда ускорение или замедление и/или поворот руля водителем выполняется медленно, могут быть гарантированно приложены момент вращения и/или сила торможения/движения, необходимые транспортному средству, а когда ускорение или замедление и/или поворот руля водителем выполняется резко, может быть гарантированно предотвращено резкое изменение момента вращения и/или силы торможения/движения транспортного средства. Кроме того, по сравнению со случаем, когда предельные значения Mlim и Flim являются постоянными, можно гарантированно снизить степень изменения момента вращения и/или силы торможения/движения транспортного средства во время резкого изменения в скорости выполнения ускорения или замедления и/или рулевого управления водителем.
В приведенном первом варианте реализации настоящего изобретения средствами привода колес являются электродвигатели-генераторы 12FL-12RR, установленные на каждом колесе. В случае, когда целевые силы Fwxti торможения/движения колес принимают отрицательные значения, означающем, что эти силы являются силами торможения, используются силы регенеративного торможения, создаваемые электродвигателями-генераторами 12FL-12RR. Соответственно энергия движения транспортного средства может быть эффективным образом возвращена в виде электрической энергии при торможении для замедления, при одновременном достижении силы торможения/движения и момента вращения, необходимых транспортному средству, которые максимально возможны в пределах диапазона сил торможения/движения, которые могут быть созданы колесами.
Хотя, в приведенном первом варианте реализации настоящего изобретения электродвигатели-генераторы 12FL-12RR встроены в колеса, они могут быть установлены на кузове транспортного средства. Кроме того, электродвигатели-генераторы как средства привода колес могут и не выполнять регенеративное торможение. Средство привода может отличаться от электродвигателя-генератора, пока оно может независимо увеличивать или уменьшать силу движения каждого колеса. Это же справедливо и для описанного ниже третьего варианта реализации настоящего изобретения.
Хотя электродвигатели-генераторы 12FL-12RR установлены таким образом, чтобы соответствовать четырем колесам в приведенном первом варианте реализации настоящего изобретения, этот вариант может быть применен к транспортному средству, имеющему средства привода, установленные только на левом и правом передних колесах или на левом и правом задних колесах. В этом случае четырехугольник 100 принимает форму, обозначенную позицией 100' на Фиг.5В, и когда момент вращения транспортного средства в направлении поворота влево и момент вращения транспортного средства в направлении поворота вправо являются максимальными значениями Mvlmax и Mvrmax соответственно, сила торможения/движения транспортного средства принимает отрицательное значение, означающее, что она является силой торможения. Указанные выше эффекты также могут быть достигнуты в таком транспортном средстве. Это также справедливо для описанного ниже третьего варианта реализации настоящего изобретения.
Второй вариант
Фиг.10 представляет собой структурную схему устройства управления силой торможения/движения, примененного для четырехколесного полноприводного транспортного средства, в котором силой движения и силой регенеративного торможения, создаваемой одним электродвигателем-генератором, общим для четырех колес, управляют таким образом, чтобы они распределялись на передние и задние колеса, а также правые и левые колеса согласно второму варианту реализации настоящего изобретения. Элементы на Фиг.10, идентичные элементам на Фиг.1, обозначены теми же ссылочными позициями.
Во втором варианте реализации настоящего изобретения установлен электродвигатель-генератор 40, который служит средством привода, общим для переднего левого колеса 10FL, переднего правого колеса 10FR, заднего левого колеса 10RL и заднего правого колеса 10RR. Сила движения или сила регенеративного торможения от электродвигателя-генератора 40 передается на карданный вал 44 передних колес и карданный вал 46 задних колес через центральный дифференциал 42, который может управлять распределением на передние и задние колеса.
Сила движения или сила регенеративного торможения от карданного вала 44 передних колес передается на ось 50L переднего левого колеса и ось 50R переднего правого колеса при помощи дифференциала 48 передних колес, который может управлять распределением на переднее левое колесо и переднее правое колесо, в результате чего эти колеса приводятся во вращение. Аналогичным образом, сила движения или сила регенеративного торможения от карданного вала 46 задних колес передается на ось 54L заднего левого колеса и ось 54R заднего правого колеса при помощи дифференциала 52 задних колес, который может управлять распределением на заднее левое колесо и заднее правое колесо, в результате чего эти колеса приводятся во вращение.
Силой движения электродвигателя-генератора 40 управляет электронный контроллер 16 для управления силой движения на основе степени φ открытия акселератора, измеренной датчиком 14 открытия акселератора. Силой регенеративного торможения электродвигателя-генератора 40 также управляет электронный контроллер 16 для управления силой движения. Электронный контроллер 16 для управления силой движения управляет распределением силы движения и силы регенеративного торможения на передние колеса и задние колеса при помощи центрального дифференциала 42, управляет распределением силы движения и силы регенеративного торможения на левое колесо и правое колесо при помощи дифференциала 48 передних колес и управляет распределением силы движения и силы регенеративного торможения на левое колесо и правое колесо при помощи дифференциала 52 задних колес.
Во втором варианте реализации настоящего изобретения электронный контроллер 16 для управления силой движения вычисляет, как и в первом варианте реализации настоящего изобретения, целевую силу Fvn торможения/движения, необходимую транспортному средству и обеспечиваемую посредством управления силой торможения/движения каждого колеса, целевой момент Mvn вращения, необходимый транспортному средству и обеспечиваемый посредством управления силой торможения/движения каждого колеса, максимальную силу Fvdmax движения, максимальную силу Fvbmax торможения, максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево и максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо, создаваемые силой торможения/движения каждого колеса.
В приведенном втором варианте реализации настоящего изобретения предполагается, что сила Fwdi движения колес при равномерном распределении максимальной силы движения электродвигателя-генератора 40 на переднее левое колесо 10FL, переднее правое колесо 10FR, заднее левое колесо 10RL и заднее правое колесо 10RR меньше возможной максимальной продольной силы, которая определяется коэффициентом µ трения обычного дорожного покрытия.
Как показано на Фиг.11А, максимальная сила Fvdmax движения транспортного средства в ситуации, когда момент вращения, создаваемый силами торможения/движения колес не действует на транспортное средство, достигается, если силы Fwxfl и Fwxfr торможения/движения переднего левого колеса 10FL и переднего правого колеса 10FR являются максимальными силами Fwdflmax и Fwdfrmax движения при условии, что распределение силы движения на правое и левое колеса равномерно, и если силы Fwxrl и Fwxrr торможения/движения заднего левого колеса 10RL и заднего правого колеса 10RR являются максимальными силами Fwdrlmax и Fwdrrmax движения при условии, что распределение силы движения на правое и левое колеса равномерно.
Аналогичным образом, как показано на Фиг.11В, максимальная сила Fvbmax торможения транспортного средства в ситуации, когда момент вращения, создаваемый силами торможения/движения колес не действует на транспортное средство, достигается, если силы Fwxfl и Fwxfr торможения/движения переднего левого колеса 10FL и переднего правого колеса 10FR являются максимальными силами Fwbflmax и Fwbfrmax торможения при условии, что распределение силы торможения на правое и левое колеса равномерно, и если силы Fwxrl и Fwxrr торможения/движения заднего левого колеса 10RL и заднего правого колеса 10RR являются максимальными силами Fwbrlmax и Fwbrrmax торможения при условии, что распределение силы торможения на правое и левое колеса равномерно.
Как показано на Фиг.11С, максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево в ситуации, когда продольная сила, создаваемая силами торможения/движения колес, не действует на транспортное средство, достигается, если сила движения распределяется на правые колеса, силы Fwxfr и Fwxrr торможения/движения переднего правого колеса 10FR и заднего правого колеса 10RR являются максимальными силами Fwdfrmax' и Fwdrrmax' движения, и их величины равны величинам максимальных сил Fwbflmax и Fwbrlmax торможения переднего левого колеса 10FL и заднего левого колеса 10RL соответственно.
Как показано на Фиг.11D, максимальный момент вращения Mvlmax' транспортного средства в направлении поворота влево в ситуации, когда сила торможения/движения транспортного средства является максимальной силой Fvdmax движения, достигается, если силы Fwxfl и Fwxrl торможения/движения переднего левого колеса 10FL и заднего левого колеса 10RL равны 0, и силы Fwxfr и Fwxrr торможения/движения переднего правого колеса 10FR и заднего правого колеса 10RR являются максимальными силами Fwdflmax' и Fwdrrmax' движения.
Как показано на Фиг.12Е, максимальный момент Mvlmax" вращения транспортного средства в направлении поворота влево в ситуации, когда сила торможения/движения транспортного средства не действует на колеса, достигается, если силы Fwxfr и Fwxrr торможения/движения переднего правого колеса 10FR и заднего правого колеса 10RR равны 0, и силы Fwxfl и Fwxrl торможения/движения переднего левого колеса 10FL и заднего левого колеса 10RL являются максимальными силами Fwbflmax и Fwbrlmax торможения.
Как показано на Фиг.12F, максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо в ситуации, когда продольная сила, создаваемая силами торможения/движения колес не действует на транспортное средство, достигается, если сила движения распределяется на левые колеса, силы Fwxfl и Fwxrl торможения/движения переднего левого колеса 10FL и заднего левого колеса 10RL являются максимальными силами Fwdflmax' и Fwdrlmax' движения, и их величины равны величинам максимальных сил Fwbfrmax и Fwbrrmax торможения переднего правого колеса 10FR и заднего правого колеса 10RR соответственно.
Как показано на Фиг.12G, максимальный момент Mvrmax' вращения транспортного средства в направлении поворота вправо в ситуации, когда сила торможения/движения транспортного средства является максимальной силой Fvdmax движения, достигается, если силы Fwxfr и Fwxrr торможения/движения переднего правого колеса 10FR и заднего правого колеса 10RR равны 0, и силы Fwxfl и Fwxrl торможения/движения переднего левого колеса 10FL и заднего левого колеса 10RL являются максимальными силами Fwdflmax' и Fwdrlmax' движения.
Как показано на Фиг.12H, максимальный момент Mvrmax" вращения транспортного средства в направлении поворота вправо в ситуации, когда сила движения транспортного средства не действует на колеса, достигается, если силы Fwxfl и Fwxrl торможения/движения переднего левого колеса 10FL и заднего левого колеса 10RL равны 0, и силы Fwxfr и Fwxrr торможения/движения переднего правого колеса 10FR и заднего правого колеса 10RR являются максимальными силами Fwbfrmax и Fwbrrmax торможения.
Максимальные силы Fwdimax движения колес определяются максимальным выходным крутящим моментом электродвигателя-генератора 40, коэффициентом µ трения дорожного покрытия и каждым из распределений на колеса, а максимальные силы Fwbimax колес определяются коэффициентом µ трения дорожного покрытия. Следовательно, максимальная сила Fvdmax движения транспортного средства, максимальная сила Fvbmax торможения транспортного средства, максимальный момент Mvlmax вращения транспортного средства в направлении поворота влево и максимальный момент Mvrmax вращения транспортного средства в направлении поворота вправо также определяются максимальным выходным крутящим моментом электродвигателя-генератора 40 и коэффициентом µ трения дорожного покрытия. Соответственно, если максимальный выходной крутящий момент электродвигателя-генератора 40 и коэффициент µ трения дорожного покрытия известны, можно оценить максимальную силу Fvdmax движения транспортного средства и другие величины.
Как показано на Фиг.15А, в прямоугольной системе координат, в которой абсциссой является сила Fvx торможения/движения транспортного средства, а ординатой является момент Mv вращения транспортного средства, эти сила и момент, которые могут достигаться путем управления силой торможения/движения каждого колеса, принимают значения в пределах шестиугольника 102, образуемого максимальной силой Fvdmax движения, максимальной силой Fvbmax торможения, максимальным моментом Mvlmax вращения в направлении поворота влево, максимальным моментом Mvrmax в направлении поворота вправо и максимальной силой Fvdmax' движения.
Следует отметить, что на Фиг.15 точки А-Н соответствуют случаям А-Н на Фиг.11 и 12. Как показано пунктирной линией на Фиг.15А, шестиугольник 102 становится небольшим при уменьшении коэффициента µ трения дорожного покрытия. Кроме того, при возрастании величины угла θ поворота руля поперечная сила переднего левого и переднего правого колес, являющихся поворачивающими колесами, увеличивается, в результате чего норма продольной силы становится небольшой. Таким образом, шестиугольник 102 становится небольшим при возрастании величины угла θ поворота руля.
Когда выходной крутящий момент электродвигателя-генератора 40 достаточно высок, максимальная сила движения и максимальная сила торможения каждого колеса определяются коэффициентом µ трения дорожного покрытия. Следовательно, если направление ускорения и направление поворота влево транспортного средства задать как положительное, соотношения между максимальной силой движения и максимальной силой торможения каждого колеса, максимальной силой движения и максимальной силой торможения транспортного средства, а также максимальным моментом вращения в направлении поворота влево и максимальным моментом вращения в направлении поворота вправо идентичны указанным в рассмотренном выше первом варианте реализации настоящего изобретения. Соответственно диапазон силы движения и момента вращения транспортного средства, которые могут быть обеспечены силами торможения/движения колес, как и в первом варианте, становится диапазоном ромба, как показано на Фиг.15 штрихпунктирной линией.
Кроме того, когда выходной крутящий момент электродвигателя-генератора 40 и максимальная сила торможения каждого колеса меньше данных параметров в этом варианте реализации настоящего изобретения, сила движения транспортного средства становится максимальной, даже если вся максимальная сила движения распределяется на левые колеса или правые колеса, а максимальная сила торможения транспортного средства становится максимальной, даже если все силы торможения распределяются на левые колеса или правые колеса. Таким образом, как показано штрихпунктирной линией на Фиг.15А, диапазон силы движения и момента вращения транспортного средства, которые могут быть достигнуты силами торможения/движения колес, становится диапазоном прямоугольника.
Координаты в точках А-Н, показанных на Фиг.15 соответственно (Fvdmax, 0), (Fvbmax, 0), (0, Mvlmax), (Fvdmax, KmMvlmax), (Fvbmax, KmMvlmax) (0, Mvrmax), (Fvdmax, -KmMvlmax) и (Fvbmax, -KmMvlmax), если предположить, что коэффициент Km задан не менее 0 и не более 1.
Предположив, что продольное распределение силы Fwxi торможения/движения на задние колеса задается как Kr (константа, 0<Kr<1), поперечное распределение силы Fwxi на правые колеса задается как Ky (0≤Ky≤1) для передних колес и задних колес, и ширина колеи транспортного средства задается как Tr, выполняются приведенные ниже уравнения 4-7. Соответственно электронный контроллер 16 для управления силой движения задает целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации путем управления силой торможения/движения каждого колеса, равными целевой силе Fvn торможения/движения транспортного средства и целевому моменту Mvn вращения транспортного средства, если эти сила и момент находятся в пределах упомянутого выше шестиугольника 102. Например, он вычисляет значения, удовлетворяющие приведенным ниже уравнениям 4-7 как целевую силу Fwxti торможения/движения (i=fl, fr, rl и rr) и поперечное распределение Ky на правые колеса методом наименьших квадратов.
Fwxfl+Fwxfr+Fwxrl+Fwxrr=Fvt (4)
{Fwxfr+Fwxrr-(Fwxfl+Fwxrl)}Tr/2=Mvt (5)
(Fwxfl+Fwxfr)Kr=(Fwxrl+Fwxrr)(1-Kr) (6)
(Fwxfl+Fwxrl)Ky=(Fwxfr+Fwxrr)(1-Ky) (7)
Когда целевая сила Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства выходят за пределы упомянутого выше шестиугольника 102, электронный контроллер 16 для управления силой движения вычисляет целевую силу Fvt торможения/движения транспортного средства и целевой момент Mvt вращения транспортного средства таким образом, что величина силы Fv торможения/движения транспортного средства и величина момента Mv вращения, создаваемых целевыми силами Fwxti торможения/движения колес, становились максимальными в пределах диапазона, в котором отношение целевой силы Fvt торможения/движения транспортного средства и момента Mvt вращения, создаваемых силами торможения/движения колес, становилось отношение целевой силы торможения/движения Fvn и целевого момента вращения Mvn, необходимых транспортному средству и создаваемых силами торможения/движения колес, как и в рассмотренном выше первом варианте реализации настоящего изобретения. Затем электронный контроллер 16 для управления силой движения вычисляет значения, удовлетворяющие приведенным выше уравнениям 4-7, как целевые силы Fwxti торможения/движения колес, например, методом наименьших квадратов.
Электронный контроллер 16 для управления силой движения вычисляет предельное значение Mlim целевого момента Mvt вращения транспортного средства на основе величины скорости изменения целевой силы Fvn торможения/движения таким образом, чтобы при высокой величине скорости изменения целевой силы Fvn торможения/движения предельное значение Mlim целевого момента Mvt вращения транспортного средства становилось небольшим, а также вычисляет предельные значения Fdlim и Fblim целевой силы Fvt торможения/движения транспортного средства на основе величины скорости изменения целевого момента Mvn вращения таким образом, чтобы при высокой величине скорости изменения целевого момента Mvn вращения предельные значения Fdlim и Fblim целевой силы Fvt торможения/вращения транспортного средства становились небольшими.
Когда величина целевого момента Mvt вращения транспортного средства после модификации превышает предельное значение Mlim, электронный контроллер 16 для управления силой движения корректирует эту величину до предельного значения Mlim. Когда величина целевой силы Fvt торможения/движения транспортного средства после модификации превышает предельное значение Fdlim, электронный контроллер 16 для управления силой движения корректирует эту величину до предельного значения Fdlim. Когда величина целевой силы Fvt торможения/движения транспортного средства после модификации меньше предельного значения Fblim, электронный контроллер 16 для управления силой движения корректирует эту величину до предельного значения Fblim. Соответственно такая схема предотвращает резкое изменение в увеличении или уменьшении целевой силы Fvt торможения/движения транспортного средства и/или целевого момента Mvt вращения транспортного средства, обусловленные резким изменением целевой силы Fvn торможения/движения и/или целевого момента Mvn вращения.
Когда сила Fv торможения/движения транспортного средства принимает положительное значение, означающее, что она является силой движения, а целевые силы Fwxti торможения/движения колес имеют положительные значения, означающие, что они являются силами движения, электронный контроллер 16 для управления силой движения задает целевые силы торможения за счет сил Fwbti трения и целевые силы Fwrti регенеративного торможения (i=fl, fr, rl, rr) колес, равными нулю, выводит сигналы, указывающие целевые силы торможения за счет сил Fwbti трения, в электронный контроллер 28 для управления силой торможения и задает целевые силы Fwdti движения (i=fl, fr, rl, rr) колес, равными целевым силам Fwxti торможения/движения.
Затем электронный контроллер 16 для управления силой движения вычисляет целевой ток It движения для электродвигателя-генератора 40 и поперечное распределение Ky для правых колес при помощи не показанных таблиц или функций на основе целевых сил Fwdti движения и управляет током движения, подаваемым на электродвигатель-генератор 40, на основе целевого тока It движения, а также управляет дифференциалом 48 передних колес и дифференциалом 52 задних колес на основе поперечного распределения Ky для правых колес, в результате управляя силой движения каждого колеса таким образом, что силы Fwxi торможения/движения становятся целевыми силами Fwxti торможения/движения.
С другой стороны, когда сила Fv торможения/движения транспортного средства принимает положительное значение, означающее, что она является силой движения, но целевая сила Fwxti торможения/движения любого одного из колес принимает отрицательное значение, означающее, что она является силой торможения, и когда сила Fv торможения/движения транспортного средства принимает отрицательное значение, означающее, что она является силой торможения, но целевая сила Fwxti торможения/движения любого одного из колес принимает положительное значение, означающее, что она является силой движения, электронный контроллер 16 для управления силой движения определяет поперечное распределение Ky для правых колес таким образом, что сила движения распределяется только на сторону, где целевые силы Fwxti торможения/движения принимают положительные значения, вычисляет целевой ток It движения для электродвигателя-генератора 40 на основе суммы положительных целевых сил Fwxti движения и выводит сигналы, указывающие целевые силы Fwxti торможения/движения, в электронный контроллер 28 для управления силой торможения таким образом, чтобы сила торможения за счет трения, создаваемая устройством 18 торможения за счет трения, подавалась на колесо, имеющее отрицательную целевую силу Fwxti торможения/движения.
Затем электронный контроллер 16 для управления силой движения управляет током движения, подаваемым на электродвигатель-генератор 40, на основе целевого тока It движения, а также управляет дифференциалом 48 передних колес и дифференциалом 52 задних колес на основе поперечного распределения Ky для правых колес. Электронный контроллер 28 для управления силой торможения подает силу торможения за счет трения, соответствующую целевой силе Fwxti торможения/движения, на колесо, имеющее отрицательную целевую силу Fwxti торможения/движения. Соответственно силами Fwxi торможения/движения колес управляют таким образом, чтобы они совпадали с целевыми силами Fwxti торможения/движения.
Когда сумма целевых сил Fwxti торможения/движения не больше максимальной силы регенеративного торможения, создаваемой электродвигателем-генератором 40 в ситуации, когда сила Fv торможения/движения транспортного средства принимает отрицательное значение, означающее, что она является силой торможения, и целевые силы Fwxti торможения/движения колес принимают отрицательные значения, означающие, что они являются силами торможения, электронный контроллер 16 для управления силой движения задает целевые силы Fwdti движения и целевые силы торможения за счет сил Fwbti трения колес, равными 0, а также задает целевую силу Frt регенеративного торможения, равной сумме целевых сил Fwxti торможения/движения, в результате управляя поперечным распределением Ky на правые колеса и электродвигателем-генератором 40 таким образом, что сила регенеративного торможения становится целевой силой Frt регенеративного торможения.
Когда величина целевой силы Fwxti торможения/движения любого одного из колес превышает максимальную силу регенеративного торможения, создаваемую электродвигателем-генератором 40 в ситуации, когда сила Fv торможения/движения транспортного средства принимает отрицательное значение, означающее, что она является силой торможения, и целевые силы Fwxti торможения/движения колес принимают отрицательные значения, означающие, что они являются силами торможения, электронный контроллер 16 для управления силой движения задает целевые силы Fwdti движения, равными 0, задает целевую силу регенеративного торможения, создаваемую электродвигателем-генератором 40, равной максимальной силе регенеративного торможения, а также задает поперечное распределение Ky на правые колеса таким образом, что распределение силы регенеративного торможения на колесо, имеющее более высокую целевую силу Fwxti торможения/движения, увеличивается.
Затем электронный контроллер 16 для управления силой движения вычисляет в качестве целевых сил торможения за счет сил Fwbti трения, значения, полученные вычитанием из целевых сил Fwxti торможения/движения колес соответствующие силы регенеративного торможения колес, и выводит сигналы, указывающие целевые силы торможения за счет сил Fwbti трения, в электронный контроллер 28 для управления силой торможения. Далее электронный контроллер 16 для управления силой движения управляет электродвигателем-генератором 40 таким образом, что сила регенеративного торможения становится максимальной силой регенеративного торможения, и управляет дифференциалом 48 передних колес и дифференциалом 52 задних колес на основе поперечного распределения Ky на правые колеса.
В данном втором варианте реализации настоящего изобретения тоже электронный контроллер 28 для управления силой торможения вычисляет целевые давления Pbti торможения (i=fl, fr, rl, rr) колес на основе целевых сил торможения за счет сил Fwbti трения колес, поступивших от электронного контроллера 16 для управления силой движения, и управляет гидравлической схемой 20 таким образом, что давления Pbi торможения колес становятся соответствующими целевыми давлениями Pbti торможения, в результате управляя таким образом, что силы торможения за счет сил Fwbi трения (i=fl, fr, rl, rr) колес становятся соответствующими целевыми силами торможения за счет сил Fwbti трения колес.
Далее со ссылкой на блок-схему, показанную на Фиг.13, рассмотрена подпрограмма вычисления целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации в ситуации, когда целевая сила Fvn торможения/движения и целевой момент Mvn вращения не могут быть достигнуты силами торможения/движения колес согласно второму варианту реализации настоящего изобретения.
На Фиг.13 Этапы, идентичные Этапам, показанным на Фиг.4, обозначены теми же ссылочными позициями. Хотя это и не показано на чертеже, в данном втором варианте реализации настоящего изобретения Этапы 10-50 и Этапы 200-220 выполняются таким же образом, что и в первом варианте, и Этапы 105, 110, 120 и 125 выполняются таким же образом, что и в первом варианте. В частности, на Этапе 105 в качестве целевой точки получают точку пересечения Q отрезка L, соединяющего точку Р, которая показывает целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, и точку начала координат О, с контуром шестиугольника 102, и целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации задают соответственно равными Fvq и Mvq, которые являются значениями в целевой точке Q.
На Этапе 115 из таблицы, соответствующей графику, показанному на Фиг.14, на основе абсолютного значения скорости изменения Mvnd целевого момента Mvt вращения транспортного средства вычисляют предельные значения Fdlim и Fblim целевой силы Fvt торможения/движения транспортного средства.
На Этапе 130 определяется, превышает ли целевая сила Fvt торможения/движения транспортного средства после модификации предельное значение Fdlimo. В случае отрицательного результата происходит переход на Этап 200, а в случае положительного результата целевая сила Fvt торможения/движения транспортного средства после модификации корректируется до Fdlim на Этапе 135. Затем происходит переход на Этап 140.
На Этапе 140 определяется, меньше ли целевая сила Fvt торможения/движения транспортного средства после модификации предельного значения Fblimo. В случае отрицательного результата происходит переход на Этап 200, а в случае положительного результата целевая сила Fvt торможения/движения транспортного средства после модификации корректируется до Fblim на Этапе 145. Затем происходит переход на Этап 200.
На Этапе 210 в данном втором варианте реализации настоящего изобретения выполняется такое же управление, что и в рассмотренном выше первом варианте, за исключением того, что целевая сила Frt регенеративного торможения и целевые силы торможения за счет сил Fwbti трения колес вычисляются, как описано выше.
Следовательно, согласно приведенному второму варианту реализации настоящего изобретения, когда целевая сила Fvn торможения/движения и целевой момент Mvn вращения не могут быть достигнуты путем управления силами торможения/движения колес, выполняются Этапы 105-145. Когда величины целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации превышают предельное значение Flim и предельные значения Mdlim и Mblim соответственно, эти величины ограничиваются упомянутыми предельными значениями. Таким образом, как и в рассмотренном выше первом варианте реализации настоящего изобретения, могут быть достигнуты сила торможения/движения и момент вращения, необходимые транспортному средству, которые максимально возможны в пределах диапазона сил торможения/движения, создаваемых колесами, и кроме того, может быть эффективным образом уменьшена вероятность ухудшения устойчивости движения транспортного средства или появления чувства дискомфорта, обусловленные резким изменением в увеличении и/или уменьшении момента вращения или силы торможения/движения транспортного средства.
Рассмотрим, например, ситуацию, когда целевая сила Fvn торможения/движения резко изменяется с постоянной скоростью из-за резкого ускорения или замедления, выполняемых водителем, и происходит перемещение точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения из Р1 в Р2, как показано на Фиг.16С. Когда изменения в целевой силе Fvt торможения/движения транспортного средства после модификации и целевом моменте Mvt вращения транспортного средства после модификации не ограничиваются, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q1→С→Q2 вдоль контура шестиугольника 102. При таком перемещении момент вращения транспортного средства сначала резко увеличивается, а затем уменьшается.
С другой стороны, согласно приведенному второму варианту реализации настоящего изобретения целевой момент Mvt вращения транспортного средства после модификации ограничивается таким образом, чтобы не превышать предельного значения Mlim. Следовательно, даже когда целевая сила Fvn торможения/движения резко изменяется из-за резкого ускорения или замедления, выполняемого водителем, происходит смена точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения, с Р1 на Р2, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q'→R2 вдоль линии, указывающей предельное значение Mlim, в результате чего можно гарантированно предотвратить резкое увеличение или уменьшение момента вращения транспортного средства.
Аналогичным образом рассмотрим, например, ситуацию, когда целевой момент Mvn вращения резко изменяется из-за резкого поворота руля водителем, и происходит смена точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения, с Р1 на Р2, как показано на Фиг.17С. Если изменения целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации не ограничиваются, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q1→D→A→G→Q2 вдоль контура шестиугольника 102. При таком перемещении сила торможения/движения транспортного средства резко увеличивается или уменьшается.
С другой стороны, согласно приведенному второму варианту реализации настоящего изобретения, целевая сила Fvt торможения/движения транспортного средства после модификации ограничивается таким образом, чтобы не превышать предельного значения Flim. Следовательно, даже когда целевой момент Mvn вращения резко изменяется из-за резкого поворота рулевой колонки водителем, и происходит смена точки, указывающей целевую силу Fvn торможения/движения и целевой момент Mvn вращения, с Р1 на Р2, точка, указывающая целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации, перемещается как Q1→R1→R2 вдоль линии, указывающей предельное значение Flim, в результате чего можно гарантированно предотвратить резкое увеличение или уменьшение силы торможения/движения транспортного средства.
Согласно приведенному второму варианту реализации настоящего изобретения, в частности, электродвигатель-генератор 40, который является общим для всех колес и служит средством привода, создает силу регенеративного торможения в случае, когда целевая сила Fvt торможения/движения транспортного средства принимает отрицательное значение, означающее, что она является силой торможения. Следовательно, как и в рассмотренном выше первом варианте реализации настоящего изобретения, энергия движения транспортного средства может быть эффективно возвращена как электрическая энергия при торможении для замедления, при этом достигаются сила торможения/движения и момент вращения, необходимые транспортному средству, которые максимально возможны в пределах диапазона силы торможения/движения, которая может быть создана каждым колесом. То же справедливо для описанного ниже третьего варианта реализации настоящего изобретения.
Хотя средством привода является электродвигатель-генератор 40, общий для четырех колес в приведенном втором варианте реализации настоящего изобретения, средством привода колес, выполняющим управление распределением силы движения между правыми и левыми колесами, может быть такое известное специалисту в данной области техники средство, как двигатель внутреннего сгорания, гибридная система или тому подобное.
Хотя в приведенном втором варианте реализации настоящего изобретения в качестве общего средства привода для четырех колес используется один электродвигатель-генератор 40, можно использовать средство привода, общее для переднего левого колеса и переднего правого колеса, и средство привода, общее для заднего левого колеса и заднего правого колеса. Кроме того, можно использовать средство привода, общее только для переднего левого колеса и переднего правого колеса, или средство привода, общее только для заднего левого колеса и заднего правого колеса. В этом случае шестиугольник 102 принимает форму 102', показанную на Фиг.15В. А именно, когда момент вращения транспортного средства в направлении поворота влево и момент вращения транспортного средства в направлении поворота вправо являются максимальными значениями Mvlmax и Mvrmax соответственно, сила торможения/движения транспортного средства принимает отрицательное значение, означающее, что она является силой торможения. Этим транспортным средством также могут быть достигнуты рассмотренные выше эффекты. Это также справедливо для описанного ниже третьего варианта реализации настоящего изобретения.
Третий вариант
Фиг.18 представляет собой блок-схему основной части подпрограммы управления силой торможения/движения в третьем варианте устройства управления силой торможения/движения транспортного средства.
Хотя это и не показано на чертеже, в данном третьем варианте реализации настоящего изобретения Этапы 10-50 и Этапы 200-220 выполняются таким же образом, что и в первом или втором вариантах, а этап 115 выполняется таким же образом, что и этап 105 в первом или втором вариантах.
Транспортное средство, к которому применяется третий вариант реализации настоящего изобретения, может представлять собой, например, четырехколесное полноприводное транспортное средство с двигателями, встроенными в колеса, описанное в первом варианте реализации настоящего изобретения, в котором сила торможения/движения прикладывается независимо к каждому колесу, или может представлять собой четырехколесное полноприводное транспортное средство, в котором силой движения и силой регенеративного торможения от одного электродвигателя-генератора, общего для четырех колес, управляют таким образом, чтобы они распределялись на передние и задние колеса, а также правые и левые колеса, как описано во втором варианте, в котором сила торможения прикладывается независимо к каждому колесу, а сила движения от средства привода, общего для правого и левого колес, прикладывается к этим колесам таким образом, чтобы ее распределение было переменным.
В данном третьем варианте реализации настоящего изобретения после завершения на Этапе 155 вычисления целевой силы Fvt торможения/движения транспортного средства после модификации и целевого момента Mvt вращения транспортного средства после модификации вычисляется скорость Fvnd изменения целевой силы Fvn торможения/движения как дифференцированное по времени значение этой силы, и на Этапе 160 из таблицы, соответствующей графику, показанному на Фиг.19, на основе абсолютного значения скорости Fvnd изменения целевой силы Fvn торможения/движения вычисляется предельное значение ΔMlim увеличения/уменьшения целевого момента Mvt вращения транспортного средства.
На Этапе 165 вычисляется скорость Mvnd изменения целевого момента Mvn вращения как дифференцированное по времени значение целевого момента Mvn вращения транспортного средства, и из таблицы, соответствующей графику, показанному на Фиг.20, на основе абсолютного значения скорости Mvnd изменения целевого момента Mvn вращения вычисляется предельное значение ΔFlim увеличения/уменьшения целевой силы Fvt торможения/движения транспортного средства.
На Этапе 170 вычисляется разница между целевым моментом Mvt вращения транспортного средства после модификации и его последним по времени значением Mvtf, т.е. увеличение/уменьшение ΔMvt целевого момента Mvt вращения транспортного средства после модификации, и определяется, превышает ли абсолютное значение ΔMvt увеличения/уменьшения предельное значение ΔMlim увеличения/уменьшения. В случае отрицательного результата происходит переход на Этап 180. В случае положительного результата на Этапе 175 целевой момент Mvt вращения транспортного средства после модификации корректируется до Mvtf+signMvt·ΔMlim, где signMvt задается как знак целевого момента Mvt вращения транспортного средства. Затем происходит переход на этап 180.
На Этапе 180 вычисляется разница между целевой силой Fvt торможения/движения транспортного средства после модификации и ее последним по времени значением Fvtf, т.е. увеличение/уменьшение ΔFvt целевой силы Fvt торможения/движения транспортного средства после модификации, и определяется, превышает ли абсолютное значение ΔFvt увеличения/уменьшения предельное значение ΔFlim увеличения/уменьшения. В случае отрицательного результата происходит переход на Этап 200. В случае положительного результата на Этапе 185 целевая сила Fvt торможения/движения транспортного средства после модификации корректируется до Fvtf+signFvt·ΔFlim, где signFvt задается как знак целевой силы Fvt торможения/движения транспортного средства. Затем происходит переход на Этап 200.
Согласно приведенному третьему варианту реализации настоящего изобретения силами торможения/движения колес управляют таким образом, чтобы отношение силы торможения/движения и момента вращения гарантированно совпадало с отношением целевой силы торможения/движения и целевого момента вращения, в результате чего могут быть достигнуты сила торможения/движения и момент вращения, необходимые транспортному средству, которые максимально возможны в пределах диапазонов сил торможения/движения, которые могут быть созданы колесами, как и в рассмотренных выше первом и втором вариантах реализации настоящего изобретения. В дополнение к этому, согласно третьему варианту реализации настоящего изобретения величины изменений целевого момента Mvt вращения транспортного средства после модификации и целевой силы Fvt торможения/движения транспортного средства после модификации ограничиваются таким образом, чтобы они не превышали предельных значений ΔMlim и ΔFlim увеличения/уменьшения соответственно, на время одного цикла в блок-схемах, показанных на Фиг.4 и 18. В результате в ситуации, когда скорость изменения величины целевой силы Fvn торможения/движения транспортного средства или скорость изменения величины целевого момента Mvn вращения транспортного средства является высокой, можно гарантированно предотвратить резкое изменение при увеличении или уменьшении целевого момента Mvt вращения транспортного средства после модификации и/или целевой силы Fvt торможения/движения транспортного средства после модификации.
Согласно каждому из рассмотренных выше вариантов реализации настоящего изобретения целевое продольное ускорение Gxt транспортного средства вычисляется на основе степени φ открытия акселератора и давления Pm в основном цилиндре, которые указывают величину ускорения или замедления, выполняемых водителем, целевая скорость γt вращения вычисляется на основе угла θ поворота руля, которая характеризует рулевое управление, выполняемое водителем, и скорости V транспортного средства, целевая скорость Fvn торможения/движения, необходимая транспортному средству вычисляется на основе целевого продольного ускорения Gxt транспортного средства, и целевой итоговый момент Mvnt вращения, необходимый транспортному средству, вычисляется на основе целевой скорости γt вращения транспортного средства.
Вычисляется момент Ms вращения при повороте транспортного средства, создаваемый поперечной силой каждого колеса, и в качестве целевого момента Mvn вращения транспортного средства вычисляется значение, получаемое путем вычитания момента Ms вращения при повороте из целевого итогового момента Mvnt вращения транспортного средства, которое необходимо транспортному средству, и может быть достигнуто путем управления силой торможения/движения каждого колеса. Таким образом может быть гарантированно и правильно вычислен в точной пропорции целевой момент вращения, необходимый транспортному средству, который должен быть достигнут путем управления силой торможения/движения каждого колеса, по сравнению с ситуацией, когда момент Ms вращения при повороте транспортного средства, обеспечиваемый поперечными силами колес, не учитывается.
Настоящее изобретение подробно рассмотрено с использованием конкретных вариантов его реализации, хотя не ограничивается этими вариантами. Специалисту в данной области техники должно быть очевидно, что в пределах объема настоящего изобретения возможны различные другие модификации.
Например, хотя сила регенеративного торможения в соответствии с необходимостью в упомянутых выше вариантах создается электродвигателями-генераторами 12FL-12RR и электродвигателем-генератором 40, может быть внесено изменение, при котором регенеративное торможение не выполняется, даже если средством привода является электродвигатель-генератор, и сила торможения создается только за счет трения.
В упомянутых выше вариантах реализации настоящего изобретения продольное распределение Kr силы торможения/движения на задние колеса является постоянным. Однако оно может задаваться переменным в соответствии с величиной угла поворота руля, в результате чего это распределение постепенно увеличивается при увеличении упомянутого угла, так как в общем случае поперечная сила поворачиваемого колеса увеличивается и допустимая продольная сила поворачиваемого колеса уменьшается при увеличении угла поворота руля.
В общем случае по мере увеличения сил торможения задних колес при торможении транспортного средства для замедления поперечная сила задних колес уменьшается, ухудшая устойчивость движения транспортного средства. Поэтому продольное распределение Kr на задние колеса можно задавать переменным в соответствии с целевой силой торможения/движения транспортного средства таким образом, чтобы оно уменьшалось, когда эта сила принимает отрицательное значение и ее величина возрастает.
В рассмотренных выше вариантах реализации настоящего изобретения, когда целевая сила Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства выходят за пределы диапазона четырехугольника 100 или шестиугольника 102, указывающего целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, которые могут быть достигнуты путем управления силами торможения/движения колес, в качестве целевой точки получают точку пересечения Q отрезка L, соединяющего точку Р, которая показывает целевую силу Fvn торможения/движения транспортного средства и целевой момент Mvn вращения транспортного средства, и точку начала координат О, с контуром четырехугольника 100 или шестиугольника 102, и целевую силу Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации задают равными соответственно Fvq и Mvq, которые являются значениями в целевой точке Q. Однако целевая сила Fvt торможения/движения транспортного средства после модификации и целевой момент Mvt вращения транспортного средства после модификации могут быть получены другим образом, пока они принимают значения, максимально близкие к целевой силе Fvn торможения/движения транспортного средства и целевому моменту Mvn вращения транспортного средства, и находятся на контуре четырехугольника 100 или шестиугольника 102.
В упомянутых выше вариантах реализации настоящего изобретения целевая сила Fvn торможения/движения и целевой момент Mvn вращения, необходимые транспортному средству и достигаемые путем управления силой торможения/движения каждого колеса, вычисляются на основе величины ускорения или замедления и величины поворота руля, выполняемых водителем. Однако в случае, когда поведение транспортного средства не устойчиво, целевая сила Fvn торможения/движения и целевой момент Mvn вращения могут быть скорректированы таким образом, чтобы вычисляться с учетом целевого продольного ускорения или целевой скорости вращения, которые необходимы для стабилизации поведения транспортного средства, в дополнение к величине ускорения или замедления и величине поворота руля, выполняемых водителем.
Упомянутые выше первый и второй варианты реализации настоящего изобретения могут быть изменены таким образом, чтобы Этапы, идентичные Этапам 160-185 в третьем варианте, выполнялись после завершения Этапа 135 в первом варианте или после завершения Этапа 145 во втором варианте, чтобы величина целевого момента Mvt вращения транспортного средства после модификации или величина целевой силы Fvt торможения/движения транспортного средства после модификации не изменялись резко, даже когда резко изменяется скорость изменения целевой силы Fvn торможения/движения или скорость изменения целевого момента Mvn вращения.
Изобретение относится к устройству управления силой торможения. Устройство содержит средство приложения силы торможения/движения, средство измерения характеристики движения, задаваемой водителем, средство вычисления целевой силы торможения/движения и целевого момента вращения транспортного средства, средство модификации целевой силы торможения/движения и/или целевого момента вращения, средство управления силой торможения/движения. Средство модификации подавляет изменение целевой силы торможения/движения после модификации, происходящее при изменении целевого момента вращения в условиях, когда целевая сила торможения/движения и/или целевой момент вращения не могут быть достигнуты силами торможения/движения колес. Технический результат заключается в достижении максимально возможной силы торможения/движения и момента вращения, при сохранении устойчивости движения транспортного средства. 2 н. и 16 з.п. ф-лы, 39 ил.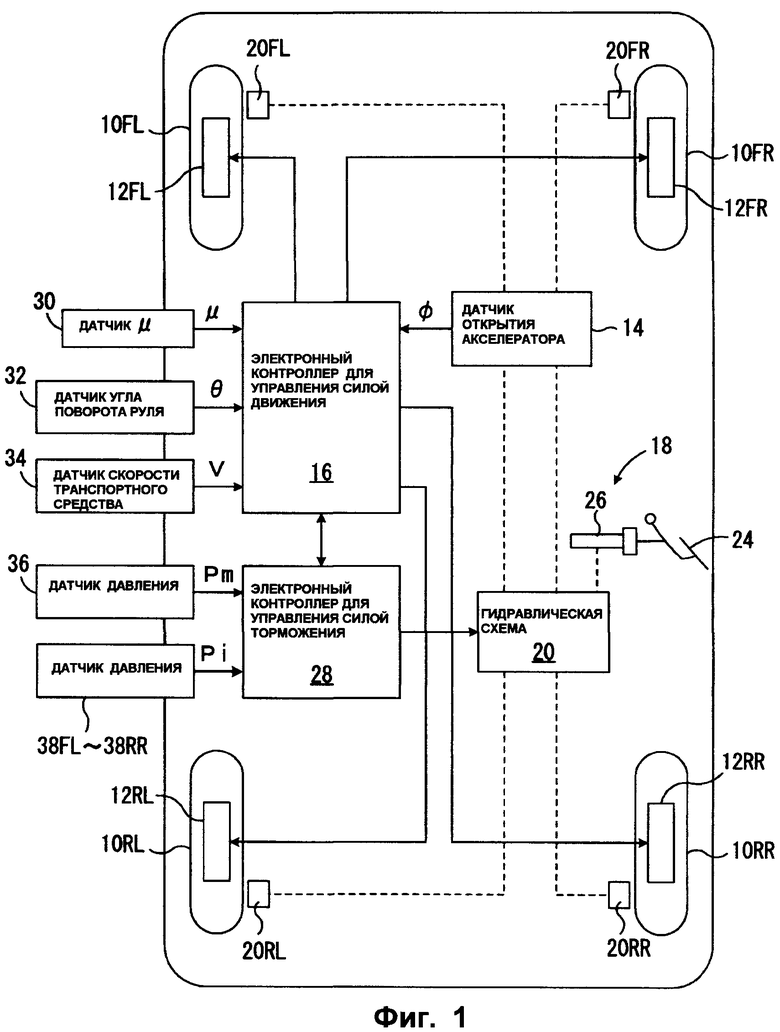
1. Устройство управления силой торможения/движения транспортного средства, содержащее
средство приложения силы торможения/движения, которое выполнено с возможностью приложения силы торможения/движения к колесам; средство измерения характеристики движения, задаваемой водителем; средство вычисления целевой силы торможения/движения и целевого момента вращения транспортного средства, которые должны быть созданы силами торможения/движения колес, на основе, по меньшей мере, характеристики движения, задаваемой водителем;
средство модификации целевой силы торможения/движения и/или целевого момента вращения таким образом, чтобы целевая сила торможения/движения после модификации и целевой момент вращения после модификации принимали значения, достижимые силами торможения/движения колес, когда целевая сила торможения/движения и целевой момент вращения не могут быть достигнуты силами торможения/движения колес; и
средство управления силой торможения/движения, прикладываемой к каждому колесу средством приложения силы торможения/движения, таким образом, чтобы сила торможения/движения и момент вращения транспортного средства, создаваемые силами торможения/движения колес, становились целевой силой торможения/движения после модификации и целевым моментом вращения после модификации,
при этом средство модификации подавляет изменение целевого момента вращения после модификации, происходящее при, по меньшей мере, изменении целевой силы торможения/движения в условиях, когда целевая сила торможения/движения и/или целевой момент вращения не могут быть достигнуты силами торможения/движения колес.
2. Устройство по п.1, в котором, если скорость изменения целевой силы торможения/движения является высокой, степень подавления изменения целевого момента вращения после модификации выше, чем в случае, когда скорость изменения целевой силы торможения/движения является небольшой.
3. Устройство по п.2, в котором степень подавления изменения целевого момента вращения после модификации выше, когда скорость изменения целевой силы торможения/движения является высокой.
4. Устройство по п.1, в котором средство модификации подавляет изменение целевого момента вращения после модификации путем ограничения величины этого момента после модификации.
5. Устройство по п.4, в котором средство модификации подавляет изменение целевого момента вращения после модификации путем ограничения величины этого момента после модификации до предельного значения, которое может быть меньше, когда величина скорости изменения целевой силы торможения/движения является высокой, по сравнению со случаем, когда величина скорости изменения целевой силы торможения/движения является небольшой.
6. Устройство по п.1, в котором средство модификации подавляет изменение целевого момента вращения после модификации путем ограничения скорости изменения этого момента после модификации.
7. Устройство по п.6, в котором средство модификации подавляет изменение целевого момента вращения после модификации путем ограничения величины скорости изменения этого момента после модификации до предельной скорости изменения, которая меньше, когда величина скорости изменения целевой силы торможения/движения является высокой, по сравнению со случаем, когда величина скорости изменения целевой силы торможения/движения является небольшой.
8. Устройство по п.1, в котором средство модификации подавляет изменение целевого момента вращения после модификации, когда скорость изменения целевой силы торможения/движения не меньше эталонного значения для подавления.
9. Устройство по п.1, в котором, используя точку пересечения прямой линии, соединяющей точку, которая указывает целевую силу торможения/движения и целевой момент вращения, и точку начала координат, и линии, указывающей наибольшее значение силы торможения/движения транспортного средства и момента вращения транспортного средства, создаваемых силами торможения/движения колес, в качестве целевой точки прямоугольной системы координат, в которой координатными осями являются сила торможения/движения транспортного средства и момент вращения транспортного средства, средство модификации присваивает целевой силе торможения/движения и целевому моменту вращения значение в целевой точке.
10. Устройство по п.1, в котором средство вычисления целевой силы торможения/движения транспортного средства и целевого момента вращения транспортного средства вычисляет целевую силу торможения/движения и целевой итоговый момент вращения, обеспечивающие устойчивое движение транспортного средства, на основе, по меньшей мере, характеристики движения, задаваемой водителем, оценивает момент вращения при повороте транспортного средства, обусловленный поперечной силой каждого колеса, на основе, по меньшей мере, характеристики движения, задаваемой водителем, и вычисляет целевой момент вращения транспортного средства, вычитая момент вращения при повороте из целевого итогового момента вращения.
11. Устройство управления силой торможения/движения, содержащее средство приложения силы торможения/движения, которое выполнено с возможностью приложения силы торможения/движения к колесам;
средство измерения характеристики движения, задаваемой водителем;
средство вычисления целевой силы торможения/движения и целевого момента вращения транспортного средства, которые должны быть созданы силами торможения/движения колес, на основе, по меньшей мере, характеристики движения, задаваемой водителем;
средство модификации целевой силы торможения/движения и/или целевого момента вращения таким образом, чтобы целевая сила торможения/движения после модификации и целевой момент вращения после модификации принимали значения, достижимые силами торможения/движения колес, когда целевая сила торможения/движения и целевой момент вращения не могут быть достигнуты силами торможения/движения колес; и
средство управления силой торможения/движения, прикладываемой к каждому колесу средством приложения силы торможения/движения, таким образом, чтобы сила торможения/движения и момент вращения транспортного средства, создаваемые силами торможения/движения колес, становились целевой силой торможения/движения после модификации и целевым моментом вращения после модификации,
при этом средство модификации подавляет изменение целевой силы торможения/движения после модификации, происходящее при, по меньшей мере, изменении целевого момента вращения в условиях, когда целевая сила торможения/движения и/или целевой момент вращения не могут быть достигнуты силами торможения/движения колес.
12. Устройство по п.11, в котором, если скорость изменения целевого момента вращения является высокой, степень подавления изменения целевой силы торможения/движения после модификации выше, чем в случае, когда скорость изменения целевого момента вращения является небольшой.
13. Устройство по п.12, в котором степень подавления изменения целевой силы торможения/движения после модификации выше, когда скорость изменения целевого момента вращения является высокой.
14. Устройство по п.11, в котором средство модификации подавляет изменение целевой силы торможения/движения после модификации путем ограничения величины этой силы после модификации.
15. Устройство по п.14, в котором средство модификации подавляет изменение целевой силы торможения/движения после модификации путем ограничения величины этой силы торможения/движения после модификации до предельного значения, которое меньше, когда величина скорости изменения целевого момента вращения является высокой, по сравнению со случаем, когда величина скорости изменения целевого момента вращения является небольшой.
16. Устройство по п.11, в котором средство модификации подавляет изменение целевой силы торможения/движения после модификации путем ограничения скорости изменения этой силы торможения/движения после модификации.
17. Устройство по п.16, в котором средство модификации подавляет изменение целевой силы торможения/движения после модификации путем ограничения величины скорости изменения этой силы торможения/движения после модификации до предельной скорости изменения, которая меньше, когда величина скорости изменения целевого момента вращения является высокой, по сравнению со случаем, когда величина скорости изменения целевого момента вращения является небольшой.
18. Устройство по п.11, в котором средство модификации подавляет изменения целевой силы торможения/движения после модификации, когда скорость изменения целевого момента вращения не меньше эталонного значения для подавления.
| JP 8310366 А, 26.11.1996 | |||
| WO 0021774 А1, 20.04.2000 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ ПРИ ТОРМОЖЕНИИ НА ПОВОРОТЕ | 2000 |
|
RU2212348C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108247C1 |

