Область техники
Настоящее изобретение относится к устройству управления торможением, которое управляет тормозным усилием, или к тормозному устройству, которое замедляет транспортное средство, и, в частности, относится к устройству управления торможением, которое управляет тормозным усилием колес, которые соединяются друг с другом через дифференциальный механизм.
Уровень техники
Источник приводного усилия, такой как двигатель, установленный в транспортном средстве, выводит крутящий момент посредством преобразования мощности, а также генерирует отрицательный крутящий момент, который сопровождает преобразование внешнего усилия в давление, тепло и/или электрическую мощность, когда источник приводного усилия вращается посредством внешнего усилия. Состояние, когда транспортное средство тормозит с помощью отрицательного крутящего момента, является состоянием торможения двигателем (торможения источником мощности) или состоянием рекуперативного торможения. Гибридное транспортное средство включает в себя двигатель внутреннего сгорания, такой как бензиновый двигатель, и электромотор с функцией генерации мощности (мотор-генератора) в качестве источника приводной мощности, который может функционировать, как описано выше. Следовательно, в гибридном транспортном средстве, двигатель внутреннего сгорания и электромотор могут использоваться для торможения транспортного средства. В этом случае, чувствительность управления крутящим моментом электромотора является превосходящей по отношению к чувствительности управления крутящим моментом двигателя внутреннего сгорания. Следовательно, является полезным управлять тормозным усилием посредством управления рекуперативным крутящим моментом электромотора.
В публикация не прошедшей экспертизы заявки на патент Японии № 2014-079099 (JP 2014-079099 A) описано тормозное устройство, которое одновременно использует рекуперативный тормоз и фрикционный тормоз. Рекуперативный тормоз использует, в качестве тормозного усилия, рекуперативный крутящий момент, получающийся в результате генерации мощности электромотора. Фрикционный тормоз предусматривается для каждого колеса. Тормозное устройство, описанное в JP 2014-079099 A, является устройством, которое применяется к транспортному средству, в котором мотор и тормозное устройство фрикционного типа предусматриваются для каждого колеса. Когда запрос торможения выполняется посредством нажатия педали тормоза или возврата педали акселератора из нажатого состояния, вышеупомянутое устройство вычисляет командное значение тормоза на основе запроса торможения и управляет рекуперативным тормозным усилием посредством электромотора и фрикционным тормозным усилием посредством тормозного устройства на основе вычисленного командного значения торможения. Как описано выше, тормозное устройство обнаруживает коэффициент проскальзывания, когда тормозное усилие прикладывается к колесу, и определяет тенденцию блокировки колеса на основе коэффициента проскальзывания. Тормозное устройство затем управляет рекуперативным тормозным усилием, которое должно быть приложено к колесу, имеющему тенденцию блокировки, которое должно быть тормозным усилием, которое меньше тормозного усилия, определенного на основе командного значения торможения, и которое не блокирует колесо. Следовательно, в изобретении, описанном в JP 2014-079099 A, поскольку чувствительность управления для рекуперативного тормозного усилия является высокой, является возможным предпочтительно устранять или пресекать тенденцию блокировки колеса.
Сущность изобретения
Коэффициент проскальзывания и тенденция блокировки колес транспортного средства изменяются время от времени в зависимости от состояния поверхности дороги, по которой транспортное средство движется. Следовательно, когда определяется тенденция блокировки колеса, тормозное устройство, описанное в JP 2014-079090 A, регулирует, из рекуперативного тормозного усилия и фрикционного тормозного усилия, которые действуют на колесо, рекуперативное тормозное усилие, имеющее высокую чувствительность к регулированию, чтобы избегать или пресекать наличие у колеса тенденции блокировки. Тормозное усилие может поддерживаться посредством изменения вышеупомянутого рекуперативного тормозного усилия, поскольку тормозное усилие, которое должно прикладываться к другим колесам, не изменяется, даже когда рекуперативное тормозное усилие, которое должно прикладываться к некоторому колесу, изменяется. Это описывается в JP 2014-079099 A. В транспортном средстве, в котором мотор соединяется с правым и левом колесами через дифференциальный механизм, приводное усилие или тормозное усилие, генерируемое мотором, делится и распределяется к правому и левому колесам посредством дифференциального механизма. Следовательно, когда тормозное усилие или коэффициент проскальзывания одного из правого и левого колес изменяется, тормозное усилие или коэффициент проскальзывания другого колеса также изменяется в соответствии с изменением. Следовательно, тормозное устройство, описанное в JP 2014-079099 A, не может быть использовано для транспортного средства, сконфигурированного так, что рекуперативное торможение выполняется через дифференциальный механизм. Другими словами, для транспортного средства, в котором рекуперативный крутящий момент передается правому и левому колесам через дифференциальный механизм, и колеса тормозятся посредством рекуперативного торможения и фрикционного торможения, существует необходимость в разработке новой технологии, которая не включена в предшествующий уровень техники, чтобы регулировать коэффициент проскальзывания или тенденцию блокировки колеса с помощью рекуперативного тормозного усилия.
Настоящее изобретение предоставляет тормозное устройство, которое, для транспортного средства, в котором генератор тормозного усилия, который генерирует отрицательный крутящий момент для торможения, соединяется, по меньшей мере, с двумя колесами через дифференциальный механизм, тормозит колеса с помощью отрицательного крутящего момента, создаваемого генератором тормозного усилия, и может предпочтительно регулировать коэффициент проскальзывания колес, в то же время изменяя отрицательный крутящий момент, который может добиваться уменьшения тормозного расстояния.
Аспект настоящего изобретения предоставляет устройство управления торможением транспортного средства, в котором генератор тормозного усилия, который генерирует тормозное усилие, которое действует в направлении уменьшения вращения множества колес, соединяется с дифференциальным механизмом, с которым множество колес соединяется, и фрикционный тормоз, который генерирует тормозное усилие, которое действует в направлении остановки вращения колес посредством трения, предусматривается для каждого из колес. Устройство управления торможением включает в себя контроллер, выполненный с возможностью регулировать тормозное усилие, которое генерируется посредством генератора тормозного усилия, и тормозное усилие, которое генерируется посредством фрикционного тормоза. Контроллер выполнен с возможностью обнаруживать колесо, имеющее тенденцию блокировки, в котором коэффициент проскальзывания больше заданного значения определения в состоянии, когда тормозное усилие передается каждому из колес от генератора тормозного усилия через дифференциальный механизм, и уменьшать тенденцию блокировки посредством изменения тормозного усилия фрикционного тормоза, который предусматривается для другого колеса, соединенного с дифференциальным механизмом, с которым колесо, имеющее тенденцию блокировки, соединяется.
В вышеупомянутом аспекте контроллер может быть выполнен с возможностью получать целевую скорость вращения колеса для другого колеса, и регулировать тормозное усилие, прикладываемое к другому колесу посредством фрикционного тормоза, который предусматривается для другого колеса, так что скорость вращения другого колеса соответствует целевой скорости вращения колеса.
В вышеописанном аспекте, когда транспортное средство выполняет поворот, целевая скорость вращения колеса может быть скоростью вращения, включающей в себя значение, которое равно половине разности скоростей правого и левого колес, полученной на основе угла поворота управляемых колес и скорости транспортного средства для транспортного средства.
В вышеупомянутом аспекте целевая скорость вращения колеса для другого колеса может быть скоростью вращения, при которой коэффициент проскальзывания другого колеса принимает значение в заданном диапазоне.
В вышеупомянутом аспекте генератор тормозного усилия может быть регенератором энергии, который генерирует отрицательный крутящий момент посредством рекуперации энергии в качестве тормозного усилия.
В вышеупомянутом аспекте контроллер может быть выполнен с возможностью получать, когда выполняется запрос замедления, базовое фрикционное тормозное усилие, которое требуется сгенерировать посредством фрикционного тормоза, вычитая заданное базовое тормозное усилие, которое должно быть сгенерировано посредством генератора тормозного усилия, из требуемого замедления из запроса замедления, получать целевую скорость вращения генератора тормозного усилия, которая соответствует целевой скорости колеса во время торможения на основе запроса замедления, и корректировать базовое тормозное усилие так, что скорость вращения генератора тормозного усилия соответствует целевой скорости вращения.
В вышеупомянутом аспекте контроллер может быть выполнен с возможностью регулировать, когда скорость одного из колес, соединенных с дифференциальным механизмом, увеличивается излишне на заданное значение или более от скорости колеса, которая соответствует целевой скорости вращения в соответствии с корректировкой базового тормозного усилия, тормозное усилие фрикционного тормоза, который предусматривается для одного из колес, так что скорость колеса одного из колес соответствует скорости колеса, которая соответствует целевой скорости вращения колеса.
Согласно вышеописанному аспекту, когда выполняется запрос торможения, генератор тормозного усилия, который соединяется с колесами через дифференциальный механизм, генерирует тормозное усилие, или в дополнение к этому, фрикционный тормоз, который предусматривается для каждого колеса, генерирует тормозное усилие. Тормозное усилие, как и все транспортное средство в вышеописанном случае, регулируется посредством изменения тормозного усилия, генерируемого посредством генератора тормозного усилия, в соответствии со скоростью вращения и коэффициентом проскальзывания колес. Когда скорость вращения (скорость колеса) какого-либо одного из колес уменьшается вследствие уменьшения коэффициента трения поверхности дороги, т.е., когда колесо имеет тенденцию блокироваться, тормозное усилие, генерируемое механизмом генератора тормозного усилия, не действует на другое колесо, которое соединяется с дифференциальным механизмом, с которым колесо, имеющее тенденцию блокировки, соединяется, вследствие дифференциального действия дифференциального механизма. Когда тенденция блокировки обнаруживается, тормозное усилие фрикционного тормоза, предусмотренного для другого колеса, изменяется (более конкретно, тормозное усилие увеличивается). В результате, тормозное усилие, которое генерируется генератором тормозного усилия и действует на колесо, имеющее коэффициент проскальзывания, который увеличивается, уменьшает или устраняет тенденцию блокировки. Тормозное усилие фрикционного тормоза может регулироваться так, что скорость вращения другого колеса соответствует целевой скорости вращения колеса. То есть, когда какое-либо из колес имеет тенденцию блокировки, устройство управления торможением настоящего изобретения применяет торможение к колесу, отличному от колеса, имеющего тенденцию блокировки, с помощью фрикционного тормоза. В результате, состояние, аналогичное состоянию, когда ограничение дифференциала накладывается на дифференциальный механизм, возникает, и тормозное усилие, которое генерируется генератором тормозного усилия и прикладывается к колесу, тенденция блокировки которого определяется, уменьшается, что увеличивает скорость вращения колеса. То есть, тенденция блокировки корректируется. Кроме того, все тормозное усилие другого колеса увеличивается, скорость вращения другого колеса регулируется, чтобы соответствовать целевой скорости вращения колеса, и коэффициент трения другого колеса приближается к максимальному значению. В результате, скорость колеса или коэффициент проскальзывания каждого колеса, соединенного с дифференциальным механизмом, регулируется так, что коэффициент трения увеличивается. Следовательно, характеристика торможения всего транспортного средства улучшается. Другими словами, тормозное расстояние может быть сокращено.
Краткое описание чертежей
Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
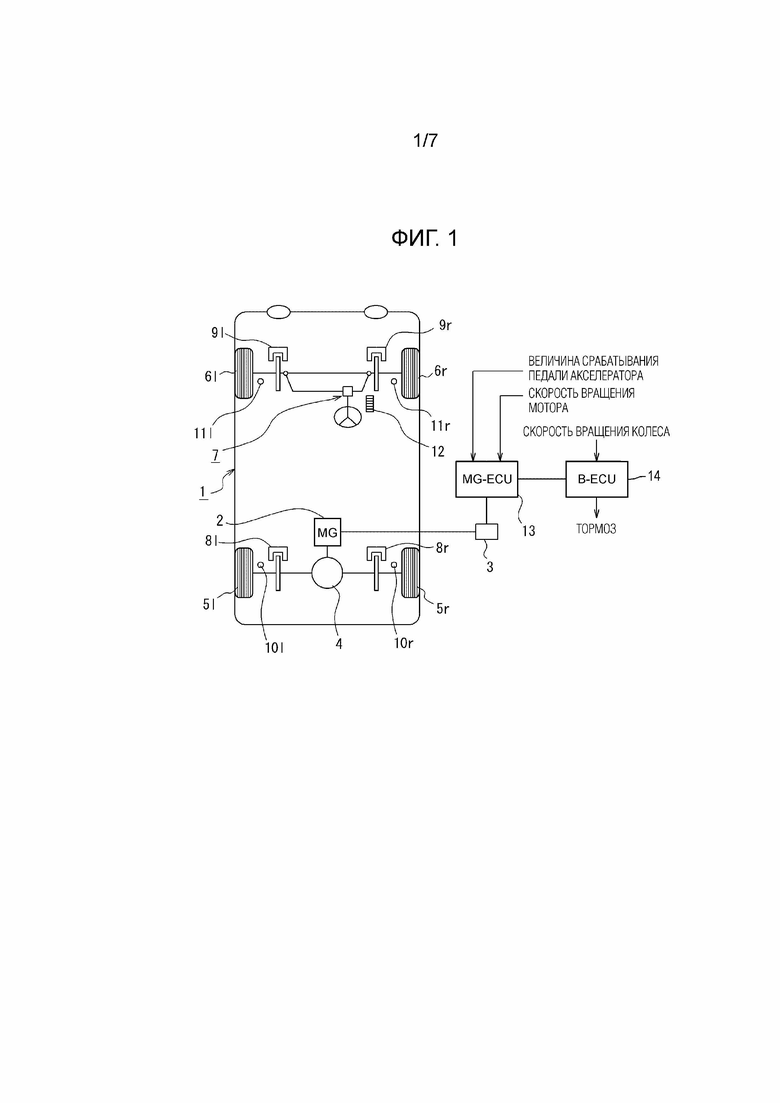
Фиг. 1 - схема, схематично показывающая транспортное средство, к которому устройство управления торможением настоящего изобретения может быть применено;
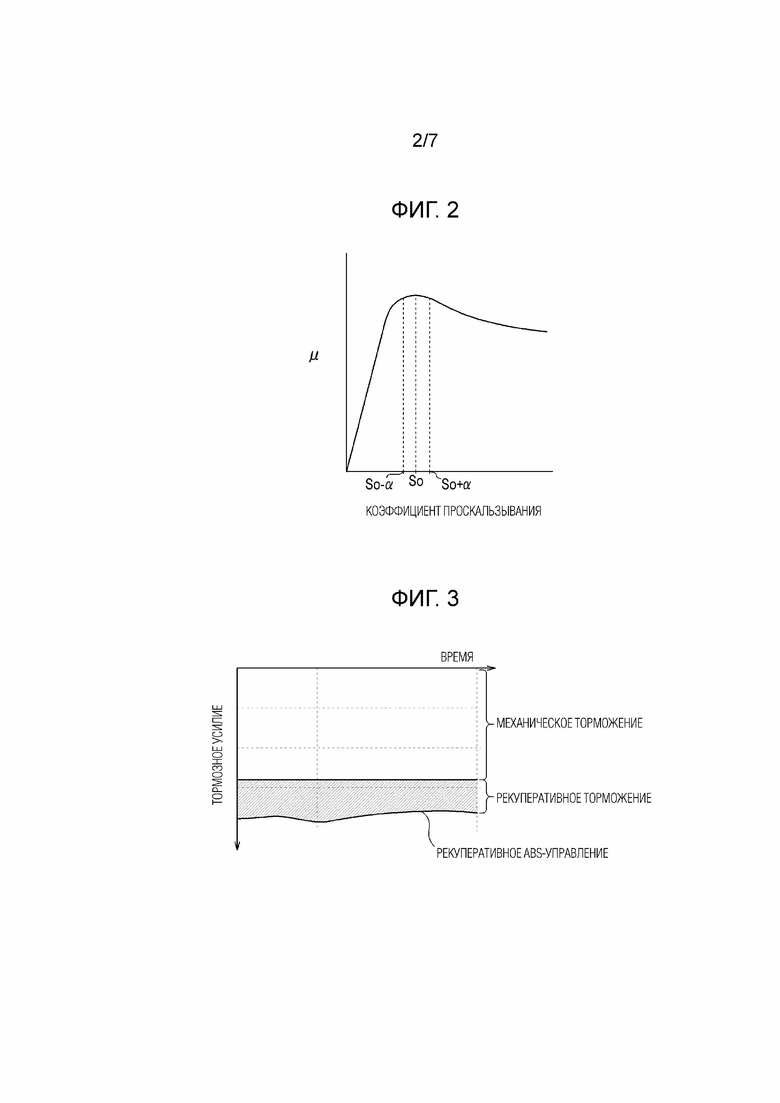
Фиг. 2 - линейный график, показывающий соотношение между коэффициентом проскальзывания и коэффициентом трения;
Фиг. 3 - схематичное соотношение между механическим (фрикционным) торможением посредством фрикционных тормозов и рекуперативным торможением;
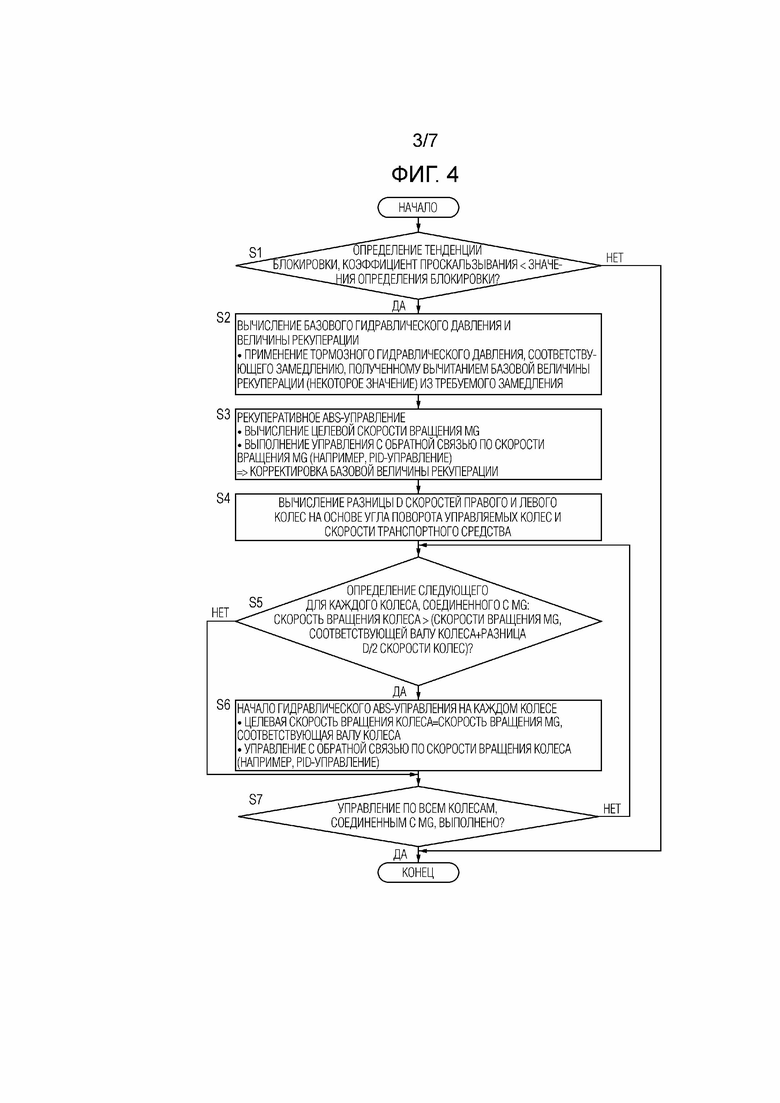
Фиг. 4 - блок-схема последовательности операций для иллюстрирования примера управления, выполняемого в варианте осуществления настоящего изобретения;
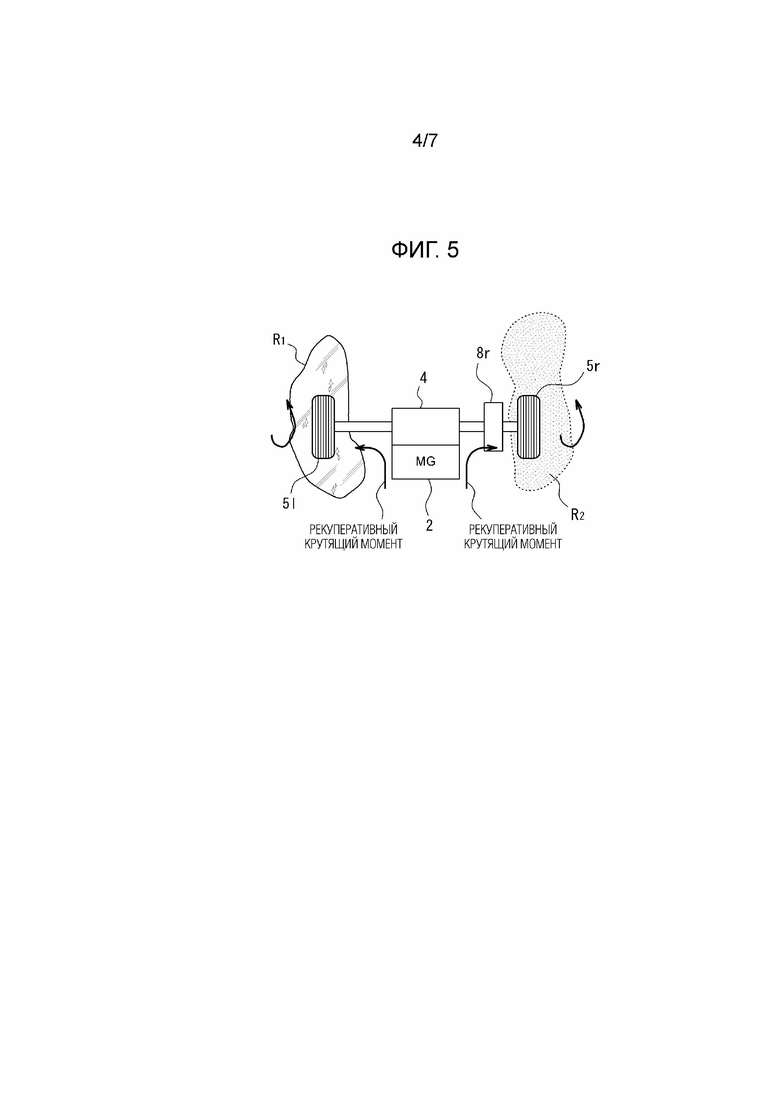
Фиг. 5 - схема, схематично показывающая состояние передачи рекуперативного крутящего момента и состояние торможения посредством фрикционных тормозов, когда торможение выполняется в состоянии, когда коэффициенты трения правого и левого колес отличаются друг от друга;
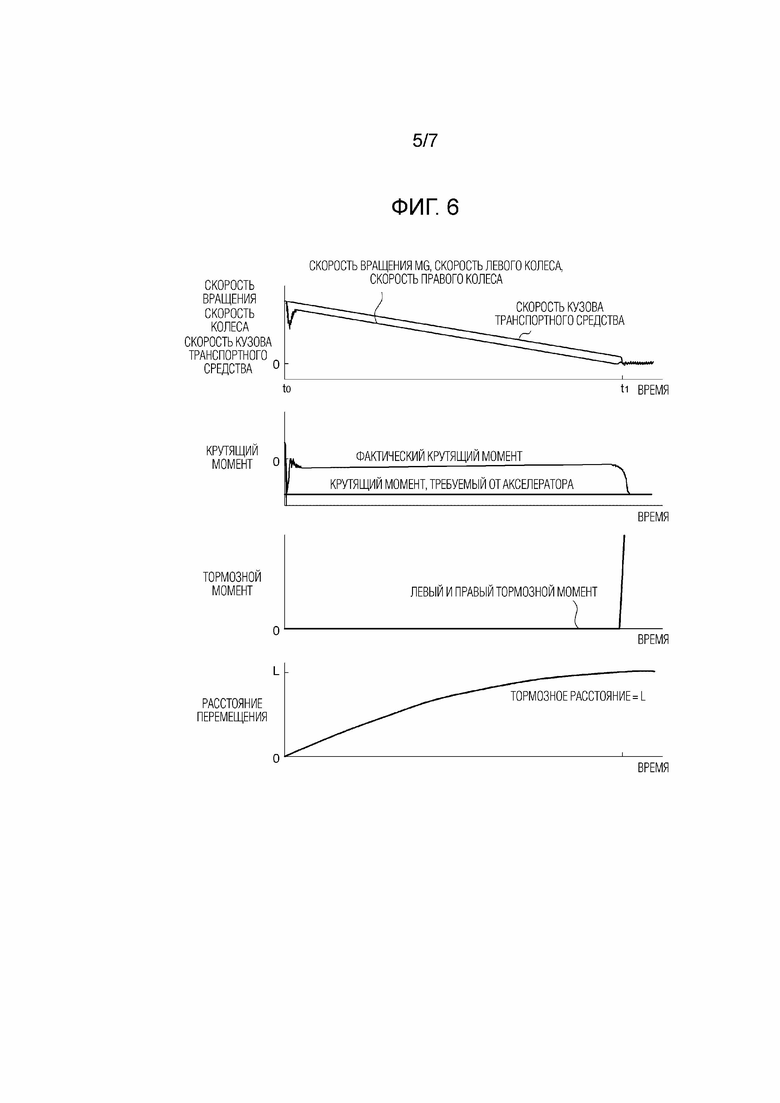
Фиг. 6 - линейный график, показывающий пример изменений в скорости вращения электромотора, скорости колеса, скорости кузова транспортного средства, тормозном моменте, моменте торможения посредством фрикционных тормозов, и расстоянии перемещения (тормозном расстоянии) от начала торможения до остановки транспортного средства, когда торможение выполняется на так называемой дороге с низким коэффициентом трения, на которой коэффициенты трения правого и левого колеса являются одинаковыми;
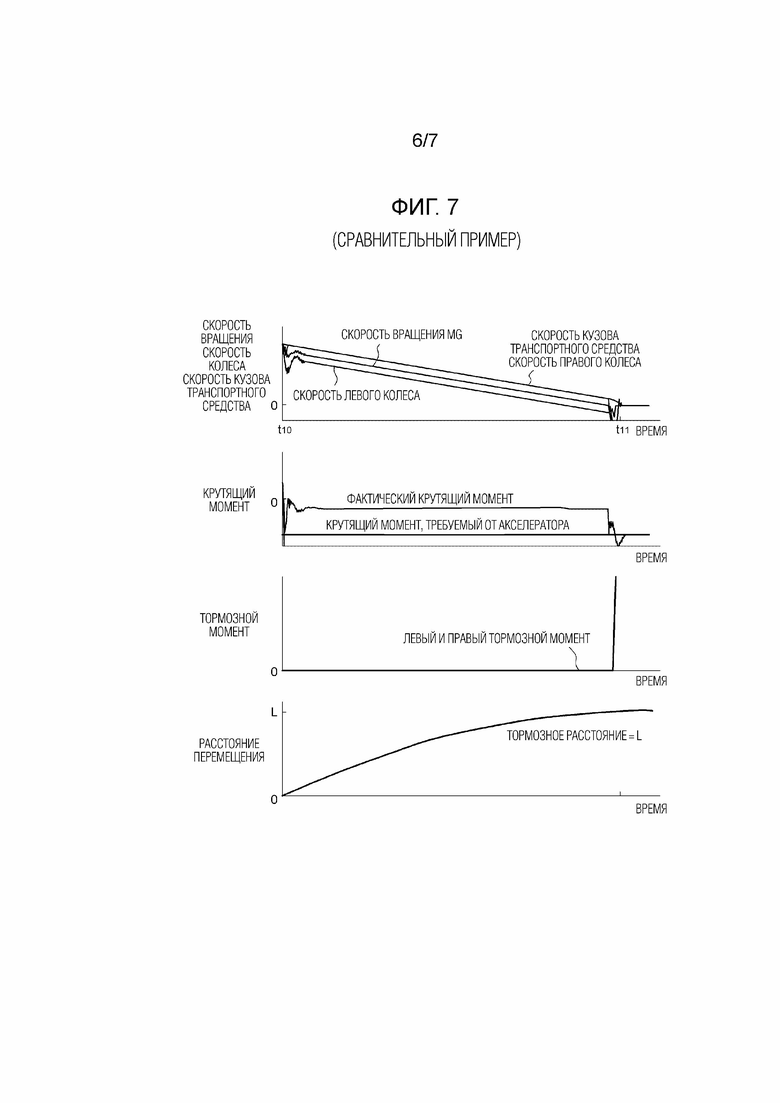
Фиг. 7 - линейный график, показывающий пример изменений в скорости вращения электромотора, скорости колеса, скорости кузова транспортного средства, тормозном моменте, моменте торможения посредством фрикционных тормозов и расстоянии перемещения (тормозном расстоянии) от начала торможения до остановки транспортного средства, когда торможение выполняется в состоянии, когда левое колесо движется по обледенелой дороге, а правое колесо движется по укатанной заснеженной дороге (сравнительный пример); и
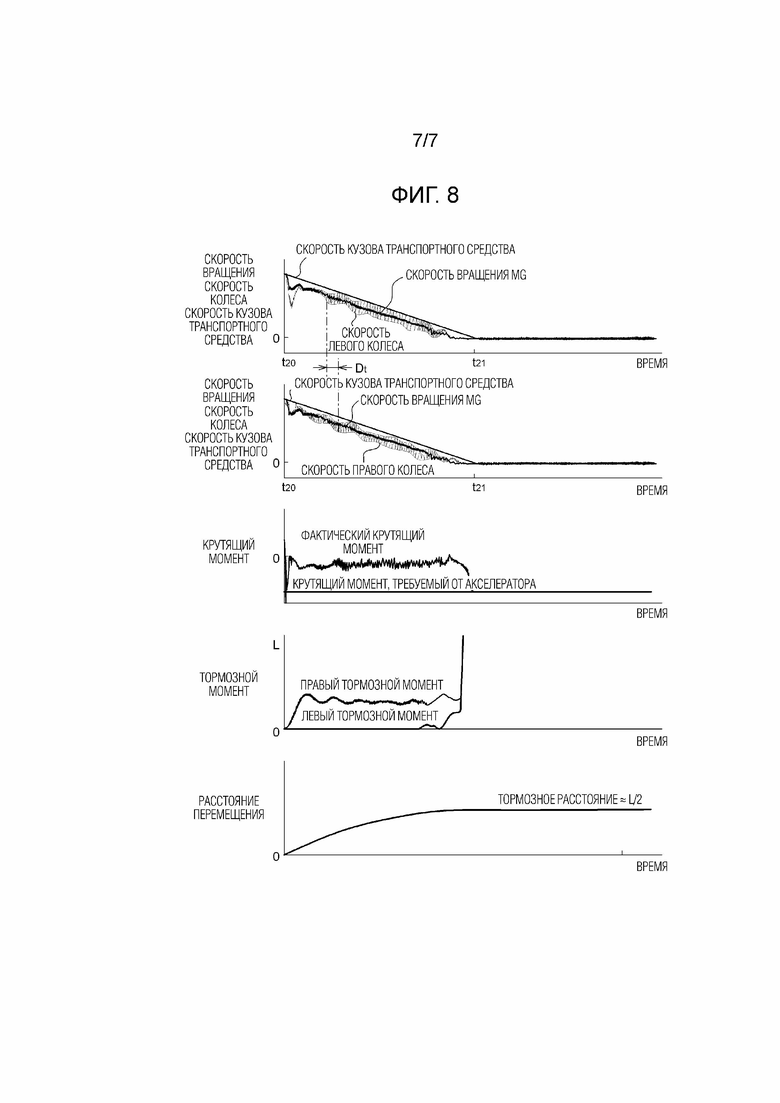
Фиг. 8 - линейный график, показывающий пример изменений в скорости вращения электромотора, скорости колеса, скорости кузова транспортного средства, тормозном моменте, моменте торможения посредством фрикционных тормозов и расстоянии перемещения (тормозном расстоянии) от начала торможения до остановки транспортного средства, когда управление согласно настоящему изобретению выполняется во время торможения в состоянии, когда левое колесо движется по обледенелой дороге, а правое колесо движется по укатанной заснеженной дороге.
Подробное описание вариантов осуществления изобретения
Транспортное средство согласно варианту осуществления настоящего изобретения может восстанавливать (рекуперировать) кинетическую энергию посредством преобразования кинетической энергии в электрическую мощность, и т.д., и может вынуждать крутящий момент при рекуперации энергии действовать на колеса в качестве тормозного усилия. В частности, в транспортном средстве, мотор или мотор-генератор (далее в данном документе совокупно называемый "мотором") соединяется с дифференциальной передачей (дифференциальным механизмом), и правое и левое колеса соединяются с дифференциальной передачей. Дополнительно, каждое колесо может быть снабжено тормозным механизмом, таким как фрикционный тормозной механизм, который выполняет торможение, отличное от рекуперативного торможения, и может быть выполнен с возможностью выполнения торможения транспортного средства с помощью как рекуперативного торможения, так и фрикционного торможения.
Фиг. 1 схематично показывает транспортное средство этого типа. Транспортное средство 1, показанное на фиг. 1, является электрическим транспортным средством, которое использует мотор (MG) 2 в качестве источника приводного усилия. Мотор 2 является, например, синхронным мотором с постоянным типом магнита. Мотор 2 выполнен с возможностью генерировать приводной крутящий момент, когда электрическая мощность подается к мотору 2, и генерировать электрическую мощность, когда мотор 2 принудительно вращается посредством силы инерции движения транспортного средства 1, например. Отрицательный крутящий момент, получающийся в результате вышеупомянутой генерации мощности, является тормозным усилием (тормозным крутящим моментом) транспортного средства 1.
Мотор 2 соединяется с устройством 3 подачи мощности. Устройство 3 подачи мощности включает в себя устройство хранения мощности, которое подает электрическую мощность к мотору 2 и хранит электрическую мощность, генерируемую мотором 2, и инвертор, который преобразует напряжение или частоту, и т.д.
Выходной вал (вал ротора) мотора 2 соединяется с дифференциальной передачей (дифференциальным механизмом) 4, которая является конечной понижающей передачей. Правое и левое парные колеса (ведущие колеса) 5r, 5l соединяются с дифференциальной передачей 4, и дифференциальная передача 4 поглощает различие в скоростях вращения правого и левого колес 5r, 5l. В примере, показанном на фиг. 1, правое и левое колеса 5r, 5l являются задними колесами. Правое и левое передние колеса 6r, 6l являются управляемыми колесами, и механизм 7 рулевого управления соединяется с ними. Следовательно, мотор 2 соответствует генератору тормозного усилия или регенератору энергии в варианте осуществления настоящего изобретения.
Тормоза 8r, 8l, 9r, 9l предусматриваются на передних и задних колесах 5r, 5l, 6r, 6l, соответственно. Тормоза 8r-9l являются такими же, что и тормозной механизм предшествующего уровня техники, и являются фрикционными тормозами, такими как дисковые тормоза, барабанные тормоза и порошковые тормоза. Тормоза 8r-9l выполнены с возможностью генерировать тормозное усилие, которое действует в направлении прекращения вращений колес 5r-6l, генерируя фрикционное усилие с помощью гидравлического давления и электромагнитной силы. Тормоза 8r-9l соответствуют фрикционным тормозам в варианте осуществления настоящего изобретения. Кроме того, переднее и заднее колеса 5r-6l снабжаются датчиками 10r, 10l, 11r, 11l, соответственно, для обнаружения скоростей вращения (скоростей колес) соответствующих колес.
Транспортное средство 1 включает в себя педаль 12 для выполнения операций ускорения и замедления. Педаль 12 может состоять из двух педалей, а именно, педали акселератора и педали тормоза. Однако, в примере, показанном на фиг. 1, педаль 12 является так называемым устройством ускорения и замедления однопедального типа, которое выполнено с возможностью выполнения ускорения и торможения посредством педали акселератора. Этот тип устройства ускорения и замедления однопедального типа может быть устройством, имеющим конфигурацию, аналогичную конфигурации устройства предшествующего уровня техники. Устройство ускорения и замедления выполнено с возможностью, в то время как транспортное средство движется, вычислять опорный угол нажатия на основе скорости транспортного средства и угла нажатия или продолжительности заданного угла нажатия, и определять, что запрос ускорения выполняется, на основе вычисленного угла, когда педаль 12 нажимается, и управлять ускорением или приводным усилием, и, напротив, определять, что запрос замедления выполняется, когда педаль 12 возвращается из вышеупомянутого угла нажатия, и управлять тормозным усилием.
Электронный блок управления (MG-ECU) 13, который управляет тормозным усилием и рекуперативным тормозным усилием (рекуперативным тормозом) посредством вышеупомянутого мотора 2, предусматривается. MG-ECU 13 конфигурируется из микрокомпьютера в качестве главного блока. MG-ECU 13 выполнен с возможностью выполнять вычисление в соответствии с входными данными и данными и программой, которые сохраняются заранее, и выводить результат вычисления (например, крутящий момент) в устройство 3 подачи мощности в качестве управляющего командного сигнала. Данные (сигнал обнаружения), вводимые в MG-ECU 13, включают в себя угол нажатия (величину срабатывания педали акселератора) педали 12, описанной выше, и скорость вращения, обнаруженную посредством датчика скорости вращения (например, резольвера (не иллюстрирован)), предусмотренного для мотора 2, и т.д.
Дополнительно, предусматривается электронный блок управления (B-ECU) 14, который управляет тормозным усилием, генерируемым посредством тормозов 8r-9l. Аналогично MG-ECU 13, как описано выше, B-ECU 14 конфигурируется из микрокомпьютера в качестве главного блока. B-ECU 14 выполнен с возможностью выполнять вычисление в соответствии с входными данными и данными и программой, которые сохраняются заранее, и выводить результат вычисления (например, гидравлическое давление для торможения) к тормозам 8r-9l в качестве управляющего командного сигнала. Дополнительно, B-ECU 14 включает в себя функционирование в качестве антиблокировочной тормозной системы (ABS). Следовательно, сигналы обнаружения от датчиков 10r, 10l, 11r, 11l, которые обнаруживают скорости колес, как описано выше, вводятся в B-ECU 14. ABS вычисляет скорость кузова транспортного средства на основе скоростей колес для колес 5r-6l и вычисляет коэффициенты проскальзывания колес 5r-6l на основе отклонения между скоростью кузова транспортного средства и соответствующими скоростями колес, определяет тенденцию блокировки колеса, имеющего коэффициент проскальзывания, который увеличивается, когда коэффициент проскальзывания увеличивается, и уменьшает тормозное усилие, чтобы устранять тенденцию блокировки колеса, т.е., инструктирует, чтобы скорость вращения колеса становилась целевой скоростью вращения колеса, полученной на основе скорости кузова транспортного средства. B-ECU 14 и MG-ECU 13 соединяются друг с другом таким образом, что имеется возможность обмена данными между ними, чтобы передавать целевую скорость вращения колеса.
Когда выполняется запрос торможения, например, посредством возврата педали 12 из нажатого состояния, в то время как транспортное средство 1 движется, рекуперативное торможение посредством мотора 2 выполняется. Это должно улучшать характеристику торможения в дополнение к улучшению энергоэффективности посредством рекуперации энергии. Характеристика торможения улучшается, когда коэффициент μ трения между колесами и поверхностью дороги является более значительным, что уменьшает тормозное расстояние. Коэффициент μ трения изменяется в соответствии с коэффициентом проскальзывания колеса, и соотношение между коэффициентом μ трения и коэффициентом проскальзывания типично является таким, как показано на фиг. 2. Здесь, коэффициент проскальзывания является значением, указывающим степень проскальзывания колеса относительно поверхности дороги, и формула является следующей: коэффициент проскальзывания = {1- (скорость колеса/скорость кузова транспортного средства)} × 100 (%). Как показано на фиг. 2, коэффициент μ трения увеличивается быстро, когда коэффициент проскальзывания увеличивается от нуля, достигает максимума при заданном значении S0 и затем постепенно уменьшается, когда коэффициент проскальзывания увеличивается. Следовательно, обычно, тормозное усилие (или скорость колеса) регулируется так, что коэффициент проскальзывания попадает в заданный диапазон (диапазон между S0 - α и S0+α на фиг. 2) с заданным значением S0, при котором коэффициент μ трения становится максимальным, в качестве центра. Мотор 2, который генерирует рекуперативное тормозное усилие, может электрически управлять крутящим моментом, и, таким образом, чувствительность управления для мотора 2 является высокой. Следовательно, в варианте осуществления настоящего изобретения, чтобы изменять тормозное усилие, чтобы следовать коэффициенту μ трения, который изменяется время от времени, рекуперативное торможение посредством мотора 2 выполняется, когда выполняется запрос торможения, и тормозное усилие гибко изменяется на основе коэффициента проскальзывания (скорости колеса).
Следует отметить, что рекуперативное тормозное усилие (рекуперативный крутящий момент), которое может быть сгенерировано посредством мотора 2, имеет свой предел, и величина рекуперативного тормозного усилия должна изменяться в соответствии с изменением в коэффициенте проскальзывания (скорости колеса). Максимальное рекуперативное усилие, таким образом, не может сохраняться сгенерированным. Соответственно, когда требуемое тормозное усилие является большим, генерирование требуемого тормозного усилия делится, чтобы вынуждать тормоза 8r, 8l, 9r, 9l фрикционного типа генерировать большую часть требуемого тормозного усилия, а мотор 2 должен генерировать оставшееся тормозное усилие. Доля тормозного усилия, которое генерируется посредством тормозов фрикционного типа, как описано выше, соответствует основному усилию фрикционного торможения в варианте осуществления настоящего изобретения. Напротив, когда требуемое тормозное усилие является небольшим, торможение посредством тормозов 8r, 8l, 9r, 9l, в основном, не выполняется, а только рекуперативное торможение посредством мотора 2 выполняется. Фиг. 3 схематично показывает соотношение между механическим (фрикционным) торможением посредством фрикционных тормозов и рекуперативным торможением.
В транспортном средстве 1, описанном выше, рекуперативное торможение посредством мотора 2 выполнятся путем инструктирования действия отрицательного крутящего момента (крутящего момента в направлении остановки вращений колес 5r, 5l), получающегося в результате функционирования мотора 2 в качестве генератора мощности, на правое и левое колеса 5r, 5l через дифференциальную передачу 4. Следовательно, когда коэффициент μ трения отличается между правым и левым колесами 5r, 5l, действие дифференциала генерируется посредством дифференциальной передачи 4, и рекуперативное тормозное усилие действует на колесо 5r (или 5l), имеющее меньший коэффициент μ трения, но не действует на колесо 5l (или 5r), имеющее больший коэффициент μ трения. Когда такое состояние возникает, функционирование в качестве антиблокировочного тормоза с помощью рекуперативного тормозного усилия, имеющего превосходную чувствительность, не может производиться. Следовательно, в варианте осуществления настоящего изобретения, транспортное средство 1 выполнено с возможностью осуществления управления, описанного ниже, чтобы устранять или пресекать влияние, вызванное дифференциальным действием дифференциальной передачи 4, чтобы улучшать характеристику торможения.
Фиг. 4 является блок-схемой последовательности операций для описания примера управления, и блок-схема последовательности операций выполняется посредством MG-ECU 13 или B-ECU 14, описанных выше. Следовательно, ECU 13 и 14 соответствуют контроллеру в варианте осуществления настоящего изобретения. Программа, показанная на фиг. 4, начинается в состоянии, когда транспортное средство 1 движется, и прежде всего, определяется тенденция блокировки колес (этап S1). Другими словами, ECU 13 или 14 обнаруживает колесо, имеющее тенденцию блокировки.
Управление, выполняемое в данном документе, является регулированием рекуперативного тормозного усилия. Колеса, подвергаемые определению тенденции блокировки, таким образом, являются правым и левым парными колесами 5r, 5l, которые соединяются с мотором 2 через дифференциальную передачу 4. То есть, колеса, подвергаемые определению тенденции блокировки, являются ведущими колесами. В частности, определение тенденции блокировки может быть выполнено посредством определения того, меньше ли коэффициент проскальзывания по сравнению со значением определения блокировки. Коэффициент проскальзывания может быть получен на основе скорости колеса и скорости кузова транспортного средства, как описано выше. Значение определения блокировки может быть указано заранее в соответствии с конструкцией. Например, среди значений, которые определяют диапазон коэффициента проскальзывания, как показано на фиг. 2, верхнее предельное значение S0+α может быть применено. Альтернативно, значение, которое слегка меньше или слегка больше верхнего предельного значения S0+α, может быть применено. Дополнительно, определение тенденции блокировки может быть выполнено одновременно параллельно для всех колес, или тенденция блокировки колес 5r, 5l, 6r, 6l может быть определена по порядку в соответствии с заданной последовательностью.
Когда отрицательное определение выполняется на этапе S1 на основе того, что какое-либо колесо не обнаруживается как имеющее тенденцию блокировки, программа, показанная на фиг. 4, завершается без выполнения регулировки. Напротив, когда положительное определение выполняется на этапе S1 на основе того, что существует колесо, имеющее тенденцию блокировки, базовое гидравлическое давление и величина рекуперации вычисляются (этап S2). Рекуперативное тормозное усилие генерируется посредством рекуперации энергии мотором 2. Величина рекуперативного тормозного усилия изменяется так, что скорость колеса вследствие изменения в коэффициенте μ трения соответствует целевой скорости колеса (скорости вращения). Следовательно, значение, имеющее допуск изменения, задается в качестве основного рекуперативного тормозного усилия. "Основное рекуперативное тормозное усилие" соответствует базовому тормозному усилию в варианте осуществления настоящего изобретения.
С другой стороны, замедление, которое требуется в это время, вычисляется на основе угла возврата педали 12 и скорости возврата, или угла нажатия и усилия наступления на педаль тормоза, когда педаль тормоза предусматривается. Тормозное усилие, сгенерированное тормозами 8r-9l (базовое фрикционное тормозное усилие), и его соответствующее гидравлическое давление могут быть получены вычитанием рекуперативного тормозного усилия (базового тормозного усилия) из тормозного усилия, которое соответствует требуемому замедлению. Соответственно, когда требуемое замедление является небольшим, может быть случай, когда замедление, которое является достаточным и необходимым, может быть выполнено только посредством рекуперативного тормозного усилия посредством мотора 2. Базовое гидравлическое давление, полученное, как описано выше, т.е., тормозное гидравлическое давление, которое генерирует замедление, полученное вычитанием доли замедления, достигнутого посредством рекуперативного торможения, из требуемого замедления, прикладывается к тормозам 8r-9l.
Регулирование тормозного гидравлического давления на этапе S2 может быть аналогично или таким же, что и обычное управление тормозом. Следовательно, регулирование на этапе S2 может быть выполнено посредством тормозной системы, которая предусматривается отдельно, и тормозное гидравлическое давление, полученное посредством отдельной тормозной системы, может быть считано на этапе S2.
Далее, выполняется рекуперативное ABS-управление (этап S3). Суммарное тормозное усилие транспортного средства 1 является суммой рекуперативного тормозного усилия посредством мотора 2 и тормозного усилия посредством тормозов 8r, 8l, 9r, 9l, и рекуперативное тормозное усилие регулируется так, чтобы изменять суммарное тормозное усилие в соответствии с коэффициентом проскальзывания. Причиной для вышесказанного является то, что чувствительность регулирования для мотора 2 является превосходящей. То есть, вышеописанное управление является управлением для регулирования рекуперативного тормозного усилия для того, чтобы управлять суммарным тормозным усилием, чтобы избегать блокировки колес. Как описано выше, является предпочтительным, что коэффициент μ трения попадает в диапазон, указанный знаками S0-α и S0+α на фиг. 2. Следовательно, коэффициент проскальзывания управляется так, что коэффициент μ трения попадает в диапазон. Соответственно, целевая скорость вращения колеса устанавливается в скорость вращения, при которой коэффициент проскальзывания соответствующего колеса попадает в вышеописанный диапазон, и скорость вращения колеса и тормозное усилие управляются, чтобы достигать целевой скорости вращения колеса.
Коэффициент проскальзывания вычисляется на основе скорости колеса и скорости кузова транспортного средства, как описано выше, и скорость колеса изменяется в соответствии с тормозным усилием. Тормозное усилие, таким образом, управляется так, что коэффициент проскальзывания попадает в вышеуказанный диапазон. В рекуперативном ABS-управлении управление тормозным усилием, как описано выше, выполняется посредством управления рекуперативным тормозным усилием посредством мотора 2, т.е., отрицательным крутящим моментом посредством мотора 2. Целевая скорость колеса на основе запроса торможения вычисляется на основе скорости кузова транспортного средства во время, когда запрос торможения выполняется, и целевого коэффициента проскальзывания. Скорость вращения мотора, соответствующая целевой скорости колеса (целевой скорости вращения MG), вычисляется на основе скорости колеса и коэффициента редукции между мотором 2 и колесами 5r, 5l. На этапе S3 целевая скорость вращения MG вычисляется, как описано выше. Управление с обратной связью (FB-управление), такое как PID-управление, выполняется на моторе 2, так что фактическая скорость вращения соответствует целевой скорости вращения MG. Вышеописанное управление изменяет крутящий момент и скорость вращения мотора 2, и базовая величина рекуперации, заданная на этапе S2 выше, корректируется в управлении с обратной связью (FB).
Далее, рассчитывается значение разницы D скорости колес между правым и левым колесами (этап S4). Отклонение скорости колес между правым и левым колесами 5r, 5l генерируется посредством различия между внутренним колесом и внешним колесом, когда транспортное средство 1 выполняет поворот, в дополнение к различию в коэффициенте проскальзывания между правым и левым колесами 5r, 5l. Разница D скорости коле между правым и левым колесами вычисляется на этапе S4, чтобы избегать влияния разницы D скорости колес, вызванной различием между внутренним и внешним колесами. Разница D скорости колес между правым и левым колесами вызывается вследствие того, что радиус поворота каждого из колес 5r, 5l, когда транспортное средство 1 выполняет поворот, отличается друг от друга. Разница D скорости колес между правым и левым колесами может, таким образом, быть получена на основе угла поворота управляемых колес и скорости транспортного средства в это время. В этом случае, в транспортном средстве с четырьмя управляемыми колесами, в котором угол поворота управляемых колес может изменяться между передними колесами и задними колесами, радиус поворота каждого колеса получается с помощью угла поворота управляемых передних колес и угла поворота управляемых задних колес, и разница D скоростей колес рассчитывается (вычисляется) на основе полученного радиуса поворота и скорости транспортного средства. Следовательно, когда операция рулевого управления не выполняется, разница D скорости колес равна "0". Отметим, что вычисление расчетного значения разницы D скорости колес между правым и левым колесами может необязательно выполняться непрерывно после вышеупомянутого этапа S3. Данные, вычисленные посредством другой системы управления, такой как система рулевого управления и антиблокировочная система, могут быть считаны, и такое считывание данных может выполняться последовательно, чтобы использовать считанные данные на основе необходимости.
То, увеличивается ли скорость вращения какого-либо из колес в соответствии с выполнением рекуперативного ABS-управления на этапе S3, определяется (этап S5). В транспортном средстве 1, показанном на фиг. 1, правое и левое колеса 5r, 5l, которые получают крутящий момент от мотора 2, соединяются через дифференциальную передачу 4, которая является дифференциальным механизмом. Следовательно, когда скорость вращения одного колеса 5r (или 5l) уменьшается, в то время как транспортное средство 1 движется, скорость вращения другого колеса 5l (или 5r) увеличивается. Причиной для вышесказанного является то, что дифференциальная передача 4 является механизмом, в котором среднее значение правой и левой выходных скоростей вращения используется в качестве входной скорости вращения. Следовательно, на этапе S5, выполняется определение, действительно ли скорость вращения колеса для каждого из колес 5r, 5l, которые соединяются с мотором 2, выше скорости вращения, полученной сложением половины (D/2) разницы D скоростей колес, описанной выше, со скоростью вращения вала колеса для мотора (MG) 2. Скорость вращения вала колеса является скоростью вращения вала колеса MG, которая определяется на основе скорости вращения мотора 2 и коэффициента редукции между мотором 2 и колесами 5r, 5l. Соответственно, на этапе S5, выполняется определение, действительно ли скорость вращения вала колеса выше скорости вращения вала колеса для мотора (MG) 2, поскольку разница D скоростей колес между правым и левым колесами равна "0", когда транспортное средство 1 движется прямо.
Например, когда коэффициент μ трения уменьшается на стороне левого колеса 5l, крутящий момент, который вращает колесо посредством силы инерции, создаваемой движением транспортного средства 1, уменьшается для левого колеса 5l. Скорость вращения левого колеса 5l уменьшается вследствие рекуперативного тормозного усилия и тормозного усилия (фрикционного тормозного усилия). В этом случае, сторона левого колеса 5l генерирует большее рекуперативное тормозное усилие, когда скорость вращения левого колеса 5l уменьшается, и, таким образом, рекуперативное тормозное усилие на стороне правого колеса 5r уменьшается, поскольку рекуперативное тормозное усилие делится и передается правому и левому колесам 5r, 5l через дифференциальную передачу 4. В результате, поскольку все тормозное усилие для правого колеса 5r уменьшается, правое колесо 5r дополнительно вращается посредством силы инерции транспортного средства 1, и скорость вращения правого колеса 5r увеличивается. Состояние, аналогичное вышеописанному, также возникает, когда скорость вращения правого колеса 5r уменьшается. В этом случае, скорость вращения левого колеса 5l увеличивается. На этапе S5 определяется, возникает ли состояние, которое описано выше. Вышеописанное определение может быть выполнено, вместо определения того, больше ли скорость вращения колеса по сравнению со скоростью вращения вала колеса MG, посредством определения того, является ли разница между скоростью вращения колеса и скоростью вращения вала колеса MG большей по сравнению с контрольным значением.
Когда положительное определение выполняется на этапе S5, гидравлическое ABS-управление для каждого колеса начинается (этап S6). Гидравлическое ABS-управление является управлением антиблокировочным торможением посредством тормозов 8r-9l фрикционного типа и управляет тормозным усилием тормозов 8r-9l, т.е., гидравлическим давлением, так что скорость вращения целевого колеса совпадает с целевой скоростью вращения колеса. Целевое колесо в данном документе является колесом, имеющим рекуперативное тормозное усилие, которое уменьшается вследствие дифференциального действия посредством дифференциальной передачи 4 (или, к которому рекуперативное тормозное усилие не распределяется), и является каким-либо одним из парных колес 5r, 5l, которые соединяются друг с другом через дифференциальную передачу 4. Другими словами, целевое колесо является колесом, на которое рекуперативное тормозное усилие не действует вследствие влияния дифференциального действия дифференциальной передачи 4, и соответствует "другому колесу" в варианте осуществления настоящего изобретения. Фиг. 5 схематично показывает вышесказанное. Во время торможения левое колесо 5l движется по поверхности R1 дороги, имеющей небольшой коэффициент μ трения, такой как укатанная заснеженная дорога, а правое колесо 5r движется по поверхности R2 дороги, имеющей больший коэффициент μ трения по сравнению с коэффициентом трения для левого колеса 5l. В результате, когда скорость вращения левого колеса 5l снижается, и, таким образом, левое колесо 5l имеет так называемую тенденцию блокировки, гидравлическое ABS-управление, описанное выше, выполняется на тормозе 8r правого колеса 5r, которое генерирует пару с левым колесом 5l.
Целевая скорость вращения колеса для каждого из колес 5r, 5l в состоянии, когда торможение выполняется с помощью мотора 2 и тормозов 8r-9l, определяется на основе скорости кузова транспортного средства и целевого коэффициента μ трения. Целевая скорость вращения колеса может быть скоростью вращения вала колеса MG, описанной выше. Следовательно, на этапе S5, гидравлическое давление тормоза, предусмотренного для колеса, имеющего скорость вращения, указанную выше, большее по сравнению со скоростью вращения вала колеса MG, управляется посредством управления с обратной связью (FB-управление; PID-управление, например), так что скорость вращения колеса совпадает со скоростью вращения вала колеса MG. В результате, когда коэффициент проскальзывания увеличивается, и определяется, что существует тенденцию блокировки, тормозное усилие тормоза, предусмотренного для другого колеса, которое генерирует через дифференциальную передачу 4 пару с колесом, тенденция блокировки которого определяется, изменяется так, чтобы уменьшать или устранять тенденцию блокировки.
Определяется, выполняются ли рекуперативное ABS-управление и гидравлическое ABS-управление, описанные выше, для всех колес 5r, 5l, которые соединяются с мотором 2 через дифференциальную передачу 4 (этап S7). Этап S7 является этапом управления, который предполагает случай, когда существует множество колес, имеющих тенденцию блокировки. Множество колес может иметь тенденцию блокировки в зависимости от конфигурации транспортного средства 1. Когда отрицательное определение выполняется на этапе S7, программа возвращается к этапу S5, описанному выше, и управления на этапе S5 и этапе S6 выполняются. Когда положительное определение выполняется на этапе S7, напротив, программа заканчивается. Когда отрицательное определение выполняется на этапе S5, описанном выше, программа переходит к этапу S7, чтобы выполнять определение о скорости вращения другого колеса. В этом случае, когда колесо, скорость вращения которого определяется на этапе S4, является последним колесом для определения скорости вращения, положительное определение выполняется на этапе S7. Следовательно, программа, показанная на фиг. 4, завершается.
Результат моделирования, выполненного, чтобы подтверждать действия и результаты варианта осуществления настоящего изобретения, будет описан. Скорость вращения мотора (скорость вращения MG), скорость колеса, скорость кузова транспортного средства, тормозной момент, крутящий момент при торможении посредством фрикционных тормозов и расстояние перемещения (тормозное расстояние) от начала торможения до остановки транспортного средства 1 измеряются для случая, когда правая и левая поверхности дороги имеют одинаковый коэффициент μ трения, и случая, когда правая и левая поверхности дороги имеют отличающиеся друг от друга коэффициенты μ трения. На фиг. 6, 7 и 8 ниже базовый крутящий момент фрикционного тормоза пропускается и устанавливается в "0".
Фиг. 6 показывает пример случая, когда торможение выполняется на поверхности дороги, имеющей коэффициент μ трения, который является небольшим и однообразным, аналогично коэффициенту трения на обледеневшей дороге, и показывает только рекуперативное торможение, поскольку требуемое замедление не является очень большим. На фиг. 6 запрос торможения выполняется в момент t0 времени посредством возврата педали 12 из нажатого состояния, и т.д., и скорость вращения мотора 2 (скорость вращения MG) уменьшается в соответствии с запросом торможения. Другими словами, рекуперативное тормозное усилие генерируется посредством мотора 2, и скорости вращения правого и левого колес 5r, 5l временно уменьшаются. Скорости вращения затем поддерживаются, чтобы избегать блокировки. Следовательно, скорость вращения MG и скорости колес для правого и левого колес 5r, 5l поддерживаются ниже скорости кузова транспортного средства до некоторой степени и постепенно уменьшаются способом, аналогичным скорости кузова транспортного средства.
Фактический крутящий момент (тормозной момент) в этом процессе не является настолько малым (не является большим в отрицательном направлении), насколько крутящий момент, запрашиваемый посредством приведения в действие педали (требуемый крутящий момент акселератора), поскольку коэффициент μ трения поверхности дороги является небольшим, и поддерживается небольшим крутящим моментом до такой степени, что блокировка колес не происходит (небольшим крутящим моментом в отрицательном направлении). Дополнительно, коэффициент μ трения является одинаковым между правой и левой сторонами транспортного средства 1, и коэффициент μ трения является небольшим. Следовательно, тормозной момент (крутящий момент при торможении) для тормозов 8r, 8l равен нулю. То есть, торможение посредством тормозов 8r, 8l не выполняется. Как описано выше, рекуперативное ABS-управление посредством мотора 2 выполняется, и скорость кузова транспортного средства становится нулевой в момент t1 времени, что останавливает транспортное средство 1. Крутящий момент при торможении увеличивается до заданного верхнего предельного значения, чтобы поддерживать состояние, когда транспортное средство 1 является остановленным. Расстояние от начала торможения до остановки транспортного средства 1 (тормозное расстояние) равно L метров.
Фиг. 7 показывает пример случая, когда одно из правого и левого парных колес 5r, 5l (например, правое колесо 5r) движется по укатанной заснеженной дороге, другое колесо (например, левое колесо 5l) движется по обледенелой дороге, имеющей меньший коэффициент μ трения по сравнению с коэффициентом трения укатанной заснеженной дороги, и торможение выполняется в состоянии, когда правый и левый коэффициенты μ трения отличаются друг от друга, и управление тормозом, чтобы устранять или пресекать влияние дифференциального действия дифференциальной передачи 4, не выполняется во время торможения. Следовательно, фиг. 7 показывает сравнительный пример.
На фиг. 7 запрос торможения выполняется посредством возврата педали 12 из нажатого состояния, и т.д., в момент t10 времени, в то время как транспортное средство движется, мотор 2 функционирует как генератор и генерирует рекуперативное торможение. То есть, аналогично примеру, показанному на фиг. 6, описанному выше, скорости вращения мотора 2 и правого и левого колес 5r, 5l поддерживаются более низкими по сравнению со скоростью кузова транспортного средства после временного значительного уменьшения, а затем постепенно уменьшаются вместе со скоростью кузова транспортного средства. В этом случае, крутящий момент, который вращается посредством силы инерции транспортного средства 1, становится меньше для левого колеса 5l, имеющего небольшой коэффициент μ трения. Следовательно, скорость вращения левого колеса 5l становится меньше скорости вращения правого колеса 5r. То есть, левое колесо 5l имеет тенденцию блокировки. Рекуперативное тормозное усилие посредством мотора 2 не действует на правое колесо 5r вследствие дифференциального действия дифференциальной передачи 4, и скорость вращения правого колеса 5r изменяется синхронно со скоростью кузова транспортного средства. Скорость вращения мотора 2 (скорость вращения вала колеса) постепенно уменьшается в соответствии с уменьшением в скорости кузова транспортного средства, в то же время поддерживая значение скорости вращения между скоростями колес для правого и левого колес. Следовательно, тенденция уменьшения является аналогичной тенденции для обычного состояния, показанного на фиг. 6.
Когда скорость кузова транспортного средства приближается к нулю, скорость колеса для левого колеса 5l становится нулевой перед этим. Поскольку скорость кузова транспортного средства все еще генерируется в это время, мотор 2 управляется в направлении увеличения рекуперативного тормозного усилия. В результате, левое колесо 5l вращается в обратном направлении, и скорость колеса для правого колеса 5r увеличивается в соответствии с обратным вращением левого колеса 5l. Так называемое временное нарушение скорости колеса возникает, и затем скорость кузова транспортного средства уменьшается до нуля (в момент t11 времени), что останавливает транспортное средство 1. Крутящий момент при торможении увеличивается до заданного верхнего предельного значения, чтобы поддерживать состояние, когда транспортное средство 1 является остановленным. Расстояние от начала торможения до остановки транспортного средства 1 (т.е. тормозное расстояние) равно L метров. Требуемый для акселератора крутящий момент, фактический крутящий момент и крутящий момент при торможении для тормозов 8r, 8l, предусмотренных для колес 5r, 5l, соответственно, являются аналогичными показанным в примере на фиг. 6. В результате, в сравнительном примере, показанном на фиг. 7, даже если рекуперативное ABS-управление выполняется, рекуперативное тормозное усилие посредством мотора 2 не действует на колесо 5r, имеющее больший коэффициент μ трения, вследствие дифференциального действия дифференциальной передачи 4. Следовательно, тормозное расстояние не уменьшается.
Фиг. 8 показывает пример варианта осуществления настоящего изобретения. Отметим, что, на фиг. 8, линия, указывающая скорость колеса для правого колеса 5r, и линия, указывающая скорость колеса для левого колеса 5l, начерчены отдельно друг от друга, чтобы избегать перекрывания линиями друг друга, делая линии трудно видимыми. Коэффициент μ трения поверхности дороги в примере на фиг. 8 является аналогичным коэффициенту трения в примере, показанном на фиг. 7. Одно из правого и левого парных колес 5r, 5l (например, правое колесо 5r) движется по укатанной заснеженной дороге, а другое колесо (например, левое колесо 5l) движется по ледяной дороге, например, имеющей меньший коэффициент μ трения по сравнению с коэффициентом трения укатанной заснеженной дороги. Коэффициенты μ трения правого и левого колес отличаются друг от друга. Когда запрос торможения выполняется, в то время как транспортное средство 1 движется по поверхности дороги, описанной выше, мотор 2 входит в рекуперативное состояние и генерирует тормозной момент (в момент t20 времени). В результате, скорости правого и левого колес уменьшаются. Однако, поскольку коэффициент μ трения является небольшим на стороне левого колеса 5l, скорость колеса для левого колеса 5l значительно уменьшается. То есть, левое колесо 5l имеет тенденцию блокировки. Вместе с вышесказанным, скорость колеса для правого колеса 5r, имеющего больший коэффициент μ трения по сравнению с коэффициентом трения левого колеса 5l, становится больше скорости колеса для левого колеса 5l вследствие дифференциального действия дифференциальной передачи 4. То есть, рекуперативное тормозное усилие не действует на правое колесо 5r, или рекуперативное тормозное усилие правого колеса 5r становится небольшим.
Устройство управления в варианте осуществления настоящего изобретения выполняет гидравлическое ABS-управление на каждом из колес 5r, 5l, как описано со ссылкой на фиг. 4. Следовательно, когда скорость колеса для правого колеса 5r увеличивается, как описано выше, гидравлическое ABS-управление выполняется на правом колесе 5r. Гидравлическое ABS-управление является управлением, чтобы изменять тормозное усилие, так что скорость вращения колеса соответствует целевой скорости вращения колеса. Как описано выше, когда левое колесо 5l имеет тенденцию блокировки, и скорость вращения (скорость колеса) правого колеса 5r становится больше целевой скорости вращения колеса, тормозное усилие (гидравлическое давление) тормоза 8r увеличивается, чтобы уменьшать скорость вращения правого колеса 5r. Как показано на фиг. 8, тормозной момент правого колеса 5r увеличивается, в то время как тормозной момент левого колеса 51 поддерживается равным нулю. Управление, описанное выше, является управлением с обратной связью (FB-управлением) для тормозного гидравлического давления с разницей между фактической скоростью вращения и целевой скоростью вращения колеса для правого колеса 5r в качестве отклонения регулирования.
Гидравлическое ABS-управление для колеса, имеющего больший коэффициент μ трения (правого колеса 5r), выполняется, когда определяется, что колесо, имеющее меньший коэффициент μ трения (левое колесо 5l), имеет тенденцию блокировки, и, дополнительно, гидравлическое ABS-управление является гидравлическим управлением. Следовательно, скорость вращения правого колеса 5r уменьшается с задержкой от уменьшения в скорости колеса для левого колеса 5l (определение о тенденции блокировки). Рекуперативное тормозное усилие затем начинает прикладываться к правому колесу 5r, скорость вращения которого уменьшается, а рекуперативное тормозное усилие, прикладываемое к левому колесу 5l, уменьшается в соответствии с вышесказанным. Следовательно, скорость вращения левого колеса 5l увеличивается, что устраняет тенденцию блокировки.
Как описано выше, когда гидравлическое ABS-управление выполняется на колесе, к которому рекуперативное тормозное усилие не прикладывается вследствие влияния дифференциального действия дифференциальной передачи 4, тормозной момент от гидравлического ABS-управления влияет на скорости колес и рекуперативное тормозное усилие для правого и левого колес 5r, 5l, и скорости вращения колес 5r, 5l слегка и многократно изменяются. Следовательно, на фиг. 8, линия, указывающая каждую из скоростей колес, показана как широкая волнистая линия, и скорость колеса пульсирует в диапазоне ширины широкой линии. Отметим, что, на фиг. 8, состояние пульсации показано линиями с более широким шагом для того, чтобы избегать сокрытия линии, указывающей скорость вращения MG. Как может быть видно из фиг. 8, скорость колеса для правого колеса 5r изменяется с задержкой около половины интервала Dt относительно изменения скорости колеса для левого колеса 5l, имеющего меньший коэффициент μ трения.
Как описано выше, гидравлическое ABS-управление является управлением с обратной связью с вращательным отклонением в качестве отклонения регулирования. Следовательно, гидравлическое давление многократно изменяется вверх и вниз. Соответственно, фактический крутящий момент (тормозной момент) всего транспортного средства 1, включающий в себя тормозное усилие посредством тормоза 8r, который гидравлически управляется, слегка и многократно изменяется, как показано широкой и волнистой линией на фиг. 8.
Тенденция блокировки колеса, имеющего меньший коэффициент μ трения (левое колесо 5l) уменьшается или устраняется посредством выполнения гидравлического ABS-управления на колесе (правом колесе 5r), скорость вращения которого (скорость колеса) увеличивается вследствие дифференциального действия дифференциальной передачи 4, как описано выше. В результате, коэффициент μ трения правого колеса 5r увеличивается, когда коэффициент проскальзывания уменьшается. В то же время, коэффициент проскальзывания правого колеса 5r, который был уменьшен, когда скорость вращения увеличивается, увеличивается посредством уменьшения скорости вращения (скорости колеса) в сторону целевой скорости вращения колеса, и коэффициент μ трения увеличивается в сторону максимального значения в соответствии с увеличением в коэффициенте проскальзывания. Как описано выше, тормозное усилие управляется так, что коэффициент μ трения между поверхностью дороги и правым и левым колесами 5r, 5l увеличивается, насколько возможно. Следовательно, расстояние перемещения (тормозное расстояние) со времени, когда скорость транспортного средства становится нулевой, до времени, когда транспортное средство 1 останавливается (в момент t21 времени), значительно уменьшается, т.е., уменьшается приблизительно наполовину (L/2), по сравнению с тормозным расстоянием L при обычной работе, показанной на фиг. 6, или тормозным расстоянием L в случае, когда управление в варианте осуществления настоящего изобретения не выполняется.
Настоящее изобретение не ограничивается вариантом осуществления, описанным выше, и транспортное средство настоящего изобретения может быть гибридным транспортным средством, включающим в себя двигатель внутреннего сгорания и мотор (мотор-генератор) в качестве источника приводного усилия, или может быть транспортным средством, включающим в себя двигатель внутреннего сгорания в качестве источника приводного усилия. Дополнительно, генератор тормозного усилия, соединенный с правым и левым колесами через дифференциальный механизм, может быть генератором мощности, который предусматривается только с целью рекуперации энергии, или может быть устройством, которое генерирует тормозное усилие без рекуперации энергии, в дополнение к мотор-генератору, который генерирует приводное усилие, чтобы вынуждать транспортное средство двигаться. Дополнительно, дифференциальный механизм может быть любым другим передаточным механизмом, имеющим другие конфигурации, таким как планетарный зубчатый механизм, в дополнение к передаточному механизму, в котором ведущая шестерня вставляется между правой и левой парой полуосевых шестерен и сцепляется с полуосевыми шестернями. Кроме того, транспортное средство, к которому настоящее изобретение применяется, может быть транспортным средством с приводом на четыре колеса (полноприводным), в котором источник приводного усилия, имеющий функцию рекуперации энергии, соединяется с дифференциальными передачами на правой и левой сторонах, в передней и задней части транспортного средства посредством раздаточных коробок, имеющих дифференциальное действие. Устройство управления согласно настоящему изобретению может быть выполнено так, чтобы управлять тормозным усилием или скоростью вращения одного из передних или задних колес с помощью фрикционных тормозов, чтобы пресекать влияние дифференциального действия раздаточной коробки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ СИЛОЙ | 2016 |
|
RU2703822C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕКУПЕРАТИВНЫМ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2671429C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2667117C2 |
| УСТРОЙСТВО РЕКУПЕРАТИВНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2658614C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2555382C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2557103C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2663257C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ/ТЯГОВЫМ УСИЛИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2372227C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2448006C2 |
Предложено устройство управления торможением транспортного средства, содержащее систему рекуперативного торможения и систему фрикционного торможения, контроллер. Контроллер выполнен с возможностью обнаружения колеса, имеющего тенденцию блокировки, в которой коэффициент проскальзывания превышает заданное значение в состоянии, когда тормозное усилие передается каждому из колес от генератора тормозного усилия через дифференциальный механизм, и уменьшения тенденции блокировки посредством изменения тормозного усилия фрикционного тормоза, который предусмотрен для другого колеса, соединенного с дифференциальным механизмом, с которым соединено колесо, имеющее тенденцию блокировки. Достигается регулирование коэффициента проскальзывания колес. 6 з.п. ф-лы, 8 ил.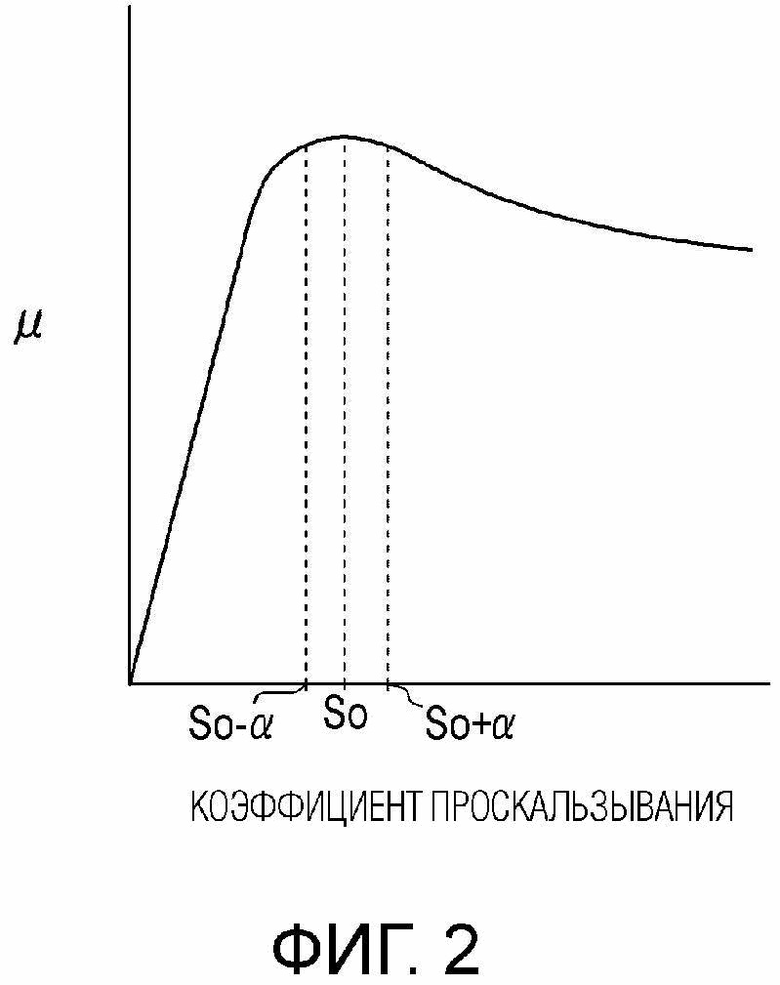
1. Устройство управления торможением транспортного средства, в котором генератор тормозного усилия, который генерирует тормозное усилие, действующее в направлении уменьшения вращения множества колес, соединен с дифференциальным механизмом, с которым соединено множество колес, причем для каждого из колес предусмотрен фрикционный тормоз, который генерирует тормозное усилие, действующее в направлении остановки вращения колес, посредством трения, при этом устройство управления торможением содержит
контроллер, выполненный с возможностью управления тормозным усилием, которое генерируется посредством генератора тормозного усилия, и тормозным усилием, которое генерируется посредством фрикционного тормоза,
причем контроллер выполнен с возможностью:
обнаружения колеса, имеющего тенденцию блокировки, в которой коэффициент проскальзывания превышает заданное значение в состоянии, когда тормозное усилие передается каждому из колес от генератора тормозного усилия через дифференциальный механизм; и
уменьшения тенденции блокировки посредством изменения тормозного усилия фрикционного тормоза, который предусмотрен для другого колеса, соединенного с дифференциальным механизмом, с которым соединено колесо, имеющее тенденцию блокировки.
2. Устройство управления торможением по п. 1, в котором контроллер выполнен с возможностью:
получения целевой скорости вращения указанного другого колеса; и
управления тормозным усилием, прикладываемым к этому другому колесу фрикционным тормозом, который предусмотрен для указанного другого колеса, так что скорость вращения указанного другого колеса соответствует целевой скорости вращения колеса.
3. Устройство управления торможением по п. 2, в котором, когда транспортное средство выполняет поворот, целевая скорость вращения колеса является скоростью вращения, включающей в себя значение, которое равно половине разности скоростей правого и левого колес, полученной на основе угла поворота управляемых колес и скорости транспортного средства.
4. Устройство управления торможением по п. 2 или 3, в котором целевая скорость вращения указанного другого колеса является скоростью вращения, при которой коэффициент проскальзывания указанного другого колеса принимает значение в заданном диапазоне.
5. Устройство управления торможением по любому из пп. 1-3, в котором генератор тормозного усилия является регенератором энергии, который генерирует отрицательный крутящий момент посредством рекуперации энергии в качестве тормозного усилия.
6. Устройство управления торможением по любому из пп. 1-3, в котором контроллер выполнен с возможностью:
получения, при выполнении запроса замедления, базового фрикционного тормозного усилия, которое требуется сгенерировать посредством фрикционного тормоза, вычитая заданное базовое тормозное усилие, которое должно быть сгенерировано генератором тормозного усилия, из требуемого замедления из запроса замедления;
получения целевой скорости вращения для генератора тормозного усилия, которая соответствует целевой скорости колеса во время торможения на основе запроса замедления; и
коррекции базового тормозного усилия, так что скорость вращения генератора тормозного усилия соответствует целевой скорости вращения.
7. Устройство управления торможением по п. 6, в котором контроллер выполнен с возможностью регулирования, когда скорость одного из колес, соединенных с дифференциальным механизмом, излишне увеличивается на заданное значение или более от скорости колеса, которая соответствует целевой скорости вращения колеса в соответствии с корректировкой базового тормозного усилия, тормозного усилия фрикционного тормоза, который предусмотрен для одного из колес, так что скорость указанного одного из колес соответствует скорости колеса, которая соответствует целевой скорости вращения колеса.
| EP 0361708 A2, 04.04.1990 | |||
| DE 10297132 B4, 15.09.2016 | |||
| DE 102004042028 A1, 02.03.2006. |

