Изобретение относится, в общем, к системам измерения зазора, более конкретно к системе измерения зазора для измерения зазора между стационарной компонентой и непрерывно вращающейся компонентой вращающейся машины.
Были использованы различные типы датчиков для измерения расстояния между двумя объектами. Кроме того, эти датчики использовались в различных приложениях. Например, паровая турбина имеет вращающуюся лопасть, которая размещена смежно держателю. Зазор между вращающейся лопастью и держателем изменяется из-за различных рабочих условий, таких как изменения в температуре, окисление наконечника лопасти и т.д. Будет целесообразным, чтобы промежуток или зазор между вращающейся лопастью и держателем сохранялся во время эксплуатации паровой турбины.
Одним известным датчиком является емкостной зонд, который измеряет емкость для оценки зазора между двумя компонентами. К сожалению, известные, основанные на емкости технические средства измерения ограничены тем, что они обеспечивают измерения, основанные на напряжении постоянного тока, для измерения зазоров между стационарной и вращающейся конструкциями, которые являются непрерывными в направлении вращения. Измерения обеспечивают статический выходной сигнал во времени, такой как уровень напряжения постоянного тока, пропорциональный зазору. В результате, изменения не учитывают изменений в зазоре из-за изменений в температуре компонент, электронных дрейфов в схеме усиления, смещения параметров электроники, окисления на наконечниках лопасти и других факторов.
Более того, эти системы измерения зазора обычно используются для измерения зазоров между компонентами во время проектирования и заводского испытания. К сожалению, эти известные системы являются неэффективными, среди других факторов, для измерений при эксплуатации из-за шума и дрейфа, сгенерированных изменениями в геометрии компонентов. Вместо этого управление зазором при эксплуатации основано на измерениях зазора, предварительно проводимых во время проектирования и заводского испытания компонент. Так как компоненты изнашиваются при эксплуатации, заводские измерения становятся неэффективными для управления зазором при эксплуатации.
Следовательно, существует потребность в разработке системы измерения зазора, которая обеспечивает точное измерение зазора между двумя компонентами посредством минимизирования влияния дрейфа калибровки, а также шума в системе. Будет также предпочтительным разработать самокалибрующуюся систему измерения зазора, которая могла быть использована для точного измерения зазора между деталями при их эксплуатации.
Краткое описание
В соответствии с некоторыми вариантами осуществления изобретения настоящие технические средства включают в себя систему измерения зазора. Система измерения зазора содержит опорный геометрический элемент, размещенный на первом объекте, имеющем в остальных случаях непрерывную геометрию поверхности, и датчик, размещенный на втором объекте, причем датчик выполнен с возможностью генерирования первого сигнала, представляющего первый измеренный параметр от первого объекта, и второго сигнала, представляющего второй измеренный параметр от опорного геометрического элемента. Система измерения зазора также содержит блок обработки, выполненный с возможностью для обработки первого и второго сигналов, чтобы оценить зазор между первым и вторым объектами на основании разности измерения между первым и вторым измеренными параметрами.
В соответствии с некоторыми вариантами осуществления изобретения настоящие технические средства имеют вращающуюся машину. Вращающаяся машина содержит вращающуюся компоненту, расположенную на расстоянии от стационарной компоненты, причем вращающаяся компонента содержит непрерывную поверхность в направлении вращения вращающейся компоненты, и опорный геометрический элемент, размещенный на непрерывной поверхности вращающейся компоненты. Вращающаяся машина также содержит датчик, выполненный с возможностью генерирования первого и второго сигналов, представляющих первый и второй измененные параметры, соответствующие вращающейся компоненте и опорному геометрическому элементу соответственно, и блок обработки, выполненный с возможностью обработки первого и второго сигналов, чтобы оценить зазор между вращающейся и стационарной компонентами на основании разности измерения между первым и вторым измеренными параметрами.
В соответствии с некоторыми вариантами осуществления изобретения настоящие технические средства обеспечивают способ измерения зазора между первым объектом и вторым объектом. Способ содержит генерирование первого сигнала, указывающего первый измененный параметр, соответствующий первому объекту, через датчик, размещенный на втором объекте, и генерирование второго сигнала, указывающего второй измеренный параметр, соответствующий опорному геометрическому элементу, размещенному на геометрии непрерывной поверхности первого объекта, через датчик, размещенный на втором объекте. Способ также содержит обработку первого и второго сигналов, чтобы оценить зазор между первым и вторым объектами на основании разности измерения между первым и вторым измененными параметрами.
Чертежи
Эти и другие признаки, аспекты и преимущества настоящего изобретения будут более понятными, если прочитать нижеприведенное подробное описание со ссылкой на сопроводительные чертежи, в которых аналогичные ссылочные позиции представляют аналогичные детали по всем чертежам, в которых
Фиг.1 - схематичная иллюстрация в перспективе паровой турбины, имеющей систему измерения зазора в соответствии с вариантами осуществления настоящих технических средств,
Фиг.2 - частичная схематичная иллюстрация в перспективе вращающихся лопастей паровой турбины по фиг.1 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.3 - схематичная иллюстрация в перспективе генератора, имеющего систему измерения зазора, в соответствии с вариантами осуществления настоящих технических средств,
Фиг.4 иллюстрирует вид в перспективе паровой турбины по фиг.1, имеющей систему измерения зазора для измерения зазора между вращающимися лопастями и держателем в соответствии с вариантами осуществления настоящих технических средств,
Фиг.5 - вид в поперечном сечении участка паровой турбины по фиг.4, в котором настоящие технические средства управления зазором могут быть использованы в соответствии с вариантами осуществления настоящих технических средств,
Фиг.6 - подробный вид в поперечном сечении по фиг.5 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.7 иллюстрирует вращающуюся компоненту с выемкой для паровой турбины по фиг.4 и 5 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.8 - графическое представление емкости, измеренной системой измерения зазора по фиг.4, от ротора по фиг.7 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.9 иллюстрирует вращающуюся компоненту с многоуровневой выемкой для паровой турбины по фиг.4 и 5 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.10 - графическое представление емкости, измеренной системой измерения зазора по фиг.3, от ротора по фиг.9 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.11 иллюстрирует вращающуюся компоненту со множеством выемок для паровой турбины по фиг.4 и 5 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.12 иллюстрирует приведенную в качестве примера конфигурацию датчиков, используемых для системы измерения зазора по фиг.1 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.13 - схематичная иллюстрация системы измерения зазора по фиг.1 и 4 в соответствии с вариантами осуществления настоящих технических средств,
Фиг.14 - графическое представление зазора, измеренного системой измерения зазора по фиг.13 в соответствии с вариантами осуществления настоящих технических средств.
Подробное описание
Как обсуждено подробно ниже, варианты осуществления настоящих технических средств функционируют для обеспечения точного измерения зазора между двумя объектами в различных системах, таких как паровая турбина, генератор, газотурбинный двигатель (например, газотурбинный двигатель самолета), машина, имеющая вращающиеся компоненты, и т.д. Обращаясь к чертежам, можно видеть, что фиг.1 иллюстрирует паровую турбину 10, имеющую систему 12 измерения зазора для измерения зазора между двумя объектами в паровой турбине 10. В иллюстрируемом варианте осуществления система 12 измерения зазора имеет конфигурацию для измерения зазора между вращающейся компонентой 14 и стационарной компонентой 16 в паровой турбине 10, которая будет описана подробно ниже.
Фиг.2 - частичная схематичная иллюстрация в перспективе вращающейся компоненты, такой как вращающиеся лопасти 20 паровой турбины по фиг.1 в соответствии с вариантами осуществления настоящих технических средств. В иллюстрируемом варианте осуществления вращающиеся лопасти 20 установлены в конфигурации, имеющей различные ступени 22 внутри стационарной компоненты, то есть держателя 16. Следует заметить, что держатель 16, который размещен около ступеней 22, не показан для простоты иллюстрации. Ступени 22 внутри держателя 16 содержат множество вращающихся лопастей 24, отстоящих одна от другой в продольном направлении вдоль длины (и оси вращения) паровой турбины 10 по фиг.1. Кроме того, вращающиеся лопасти 24 отстоят от держателя 16 в радиальном направлении. Другими словами, наружный диаметр вращающихся лопастей 24 меньше внутреннего диаметра держателя 16, как показано со ссылкой на фиг.1 и 2. Поэтому существует сравнительно небольшой зазор между наружной периферией вращающихся лопастей 24 и внутренней поверхностью держателя 16. Более того, за исключением параметров управления зазором, обсуждаемых подробно ниже, вращающиеся лопасти 24 образуют непрерывную круглую конструкцию вокруг оси 26 вращения вращающихся лопастей 26. В этом варианте осуществления система 12 (см. фиг.1) измерения зазора имеет конфигурацию для измерения зазора между стационарной компонентой (то есть держателем) 16 и вращающейся компонентой (то есть вращающимися лопастями) 24, имеющей геометрию непрерывной поверхности (то есть непрерывную круглую геометрию). В определенных вариантах осуществления система 12 измерения зазора может быть использована для измерения зазора между стационарной и вращающейся компонентами в генераторе, как будет подробно описано ниже со ссылкой на фиг.3. Однако измерение зазора в другом вращающемся машинном оборудовании, имеющем вращающуюся компоненту с геометрией непрерывной поверхности, также не выходит за рамки этой заявки.
Фиг.3 - схематичная иллюстрация в перспективе электрической машины, такой как генератор 30, имеющей систему 12 измерения зазора в соответствии с вариантами осуществления настоящих технических средств. В иллюстрируемом варианте осуществления генератор 30 содержит узел 32 корпуса, который охватывает и несет различные компоненты генератора 30. Генератор также содержит узел 34 ротора, который содержит вал 36 ротора, простирающийся через сердечник 38 ротора. Более того, узел 34 ротора также содержит магнитные узлы 40, установленные на наружной периферийной поверхности сердечника 38 ротора и генерирующие магнитный поток. Узел 34 ротора вместе с валом 36 может вращаться внутри узла 42 статора в направлении по часовой стрелке или против часовой стрелки, как показано стрелкой 44 направления. Такое вращение может быть упрощено подшипниковыми узлами, которые охватывают вал 36 ротора. Специалистам в данной области техники будет понятно, что различные типы подшипниковых узлов могут быть использованы для установки вала 36 ротора.
В иллюстрируемом варианте осуществления узел 34 ротора размещен в камере узла 42 статора, который, в свою очередь, заключен внутри корпуса 32. Узел 42 статора содержит множество обмоток 46 статора, которые простираются по периферии вокруг и в осевом направлении вдоль вала 36 ротора через узел 42 статора. Во время работы вращение узла 34 ротора, имеющего магнитные узлы 40, обусловливает образование переменного магнитного поля внутри генератора 30. Это переменное магнитное поле возбуждает напряжение в обмотках 46 статора. Таким образом, кинетическая энергия узла 34 ротора превращается в электрическую энергию в виде электрического тока и напряжения в обмотках 46 статора. Следует заметить, что зазор между узлами 34 и 42 ротора и статора поддерживается внутри заранее заданного диапазона. В настоящем варианте осуществления система 12 измерения зазора связана с узлом 42 статора для измерения зазора между узлами 34 и 42 ротора и статора. В этом варианте осуществления система 12 измерения зазора содержит емкостной зонд, и зазор между узлами 34 и 42 ротора и статора оценивается на основании емкости, измеренной через емкостной зонд.
Система 12 измерения зазора, используемая для измерения зазора между стационарной и вращающейся компонентами в паровой турбине, и генератор по фиг.1 и 2 имеют конфигурацию для преобразования основанных на постоянном токе измерений емкости между стационарной и вращающейся компонентами в изменяющиеся во времени измерения емкости. Система 12 измерения зазора выполняет это преобразование на основании, по меньшей мере, одного опорного геометрического элемента (например, выемки, паза, канавки и т.д.), прерывающей целостность геометрии непрерывной поверхности (например, непрерывной круглой геометрии) вращающейся компоненты вокруг оси вращения 44. Такие изменяющиеся во времени измерения емкости используются для оценки зазора между узлами 34 и 42 ротора и статора, как будет более подробно описано ниже.
Фиг.4 иллюстрирует вращающуюся машину, такую как паровая турбина 50, показанную на фиг.1, в которой аспекты настоящих технических средств могут быть внедрены для измерения зазора между вращающейся и стационарной компонентами. Паровая турбина 50 содержит ротор 52, установленный на валу 54. Множество турбинных лопаток 56, которые могут быть также отнесены к лопастям, закреплено на роторе 52. При работе лопатки 56 подвергаются воздействию пара 58 при высокой температуре и давлении, которое заставляет лопатки 56 вращаться вокруг оси 60. Лопатки 56 вращаются внутри стационарного корпуса или кожуха 62, который размещен радиально и по периферии вокруг лопаток 56. Существует сравнительно небольшой зазор между лопатками 56 и кожухом 62 для упрощения вращения лопаток 56 внутри кожуха 62, при этом также предотвращая избыточную утечку рабочей текучей среды, то есть пара между лопатками и кожухом 62. В соответствии с настоящими техническими средствами установлены один или более датчиков 64 зазора внутри и по периферии вокруг стационарного кожуха 62. В иллюстрируемом варианте осуществления датчики 64 зазора содержат емкостные зонды. В определенных вариантах осуществления изобретения датчики 64 зазора могут содержать основанные на СВЧ-излучении детекторы или оптические датчики, датчики вихревых токов, а измеренные параметры могут содержать соответственно импеданс, или запаздывание по фазе, или наведенный ток. Как объясняется подробно ниже, каждый из датчиков 64 имеет конфигурацию для генерирования сигнала, указывающего на радиальное и осевое положение лопаток 56 по отношению к кожуху 62 в их соответствующих периферийных положениях.
На фиг.5 приведен вид в поперечном сечении для донного или более низкого участка 70 паровой турбины 10 по фиг.4, иллюстрирующий в качестве примера радиальный и осевой зазор, который может быть измерен настоящими техническими средствами. В иллюстрируемом варианте осуществления наконечник лопатки 56 содержит уплотняющий зуб или герметизирующий зуб 72, который входит в зацепление с выемкой 74, образованной на внутренней периферии кожуха 62. В настоящем варианте осуществления система 12 измерения зазора (см. фиг.1) может быть связана с кожухом 62 для измерения радиального и осевого зазоров между наконечником лопатки 56 и кожухом 62.
Фиг.6 является подробным видом в поперечном сечении участка 76 кожуха и лопатки паровой турбины по фиг.5. Как показано, радиальный зазор между герметизирующим зубом 72 и кожухом 62 представлен ссылочной позицией 78, а осевой зазор между зубом 72 и кожухом 62 представлен ссылочной позицией 80. В настоящем варианте осуществления радиальный и осевой зазоры 78 и 80 представляют зазоры между центральным зубом и кожухом. Как будет понятно специалистам в данной области техники, зазоры между другими герметизирующими зубами и кожухом 62 могут быть аналогичным образом оценены с помощью настоящих технических средств.
В некоторых вариантах осуществления из-за различий в коэффициенте теплового расширения кожуха 62 и ротора 56 имеется вероятность того, что радиальный зазор 78 может быть сведен к нулю, приводя к взаимодействию между герметизирующим зубом 72 и пазом 74. Более того, из-за этого различия в коэффициенте расширения ротор 56 может увеличить свой размер в осевом направлении по отношению к кожуху 62, что приводит к истиранию зубов 72 внутри выемки 74 в осевом направлении, таким образом увеличивая степень износа на компонентах. Эти вредные взаимодействия также могут привести к повреждению компонентов. Настоящие технические средства обеспечивают централизованное измерение радиального и осевого зазоров 78 и 80, которое может быть внедрено в стратегию управления с обратной связью для поддержания этих зазоров на значениях внутри приемлемых пределов. Стратегия управления может содержать, например, тепловое воздействие на кожух 62, заставляя его расшириться соответствующим образом, когда зазор между кожухом 62 и уплотняющими зубами 72 уменьшается. В этом варианте осуществления тепловые исполнительные органы используют свойство теплового расширения для создания перемещения кожуха 62. В некоторых других вариантах осуществления могут быть использованы механические исполнительные органы для компенсации увеличения осевого размера лопатки 56 внутри кожуха 62.
Как будет понятно специалистам обычной квалификации в данной области техники, емкость между двумя объектами является функцией площади поверхности перекрытия и разноса между двумя объектами. В настоящем варианте осуществления емкость между ротором 56 и кожухом 62 является функцией радиального зазора 78 и площади перекрытия, которая, в свою очередь, прямо пропорциональна осевому зазору герметизирующих зубов 72 относительно кожуха 62. Когда ротор 56 расширяется в радиальном направлении, радиальный зазор между герметизирующими зубами 72 и кожухом 62 изменяется.
Аналогичным образом, когда герметизирующие зубы 72 перемещаются в осевом направлении через паз 74, площадь головки датчика, покрытая герметизирующими зубами 72, будет изменяться. Эти изменения, в результате, приводят к изменению в измеряемой емкости. В соответствии с аспектами настоящих технических средств, обсуждаемых ниже, изменение в емкости может быть скоррелировано с осевыми и радиальными смещениями, а поэтому может быть обеспечено измерение составного зазора. Измерение радиального и осевого зазоров 78 и 80 через систему измерения зазора будет дополнительно описано ниже со ссылкой на фиг.7-13.
Фиг.7 иллюстрирует вращающуюся компоненту 82 с выемкой для паровой турбины по фиг.4-5. В иллюстрируемом варианте осуществления вращающаяся компонента 82 содержит множество лопаток или лопастей 56, образующих непрерывную круглую конструкцию 84 вокруг оси вращения. Более того, вращающаяся компонента 82 также содержит опорный геометрический элемент 86, прерывающий целостность непрерывной круглой конструкции 84. Примеры такого опорного геометрического элемента 86 включают впадины, такие как зазубрины, выемки, пазы, канавки и т.д.
При работе датчик 64 (см. фиг.4), размещенный на стационарной компоненте 62, генерирует первый сигнал, представляющий первый измеренный параметр от вращающейся компоненты 82 (например, непрерывной круглой геометрии). Кроме того, датчик 64 генерирует второй сигнал, представляющий второй измеренный параметр от опорного геометрического элемента 86. В этом варианте осуществления датчик 64 содержит емкостной зонд, а первый и второй измеренные параметры включают емкость. Более того, первый и второй сигналы от датчика 64 обрабатываются на основании разности измерения между первым и вторым измеренными параметрами, чтобы оценить радиальный и осевой зазоры между стационарной и вращающейся компонентами 62 и 82. В определенных вариантах осуществления датчик 64 может содержать, по меньшей мере, два наконечника зонда для измерения осевого и радиального зазоров между стационарной и вращающейся компонентами 62 и 82.
В иллюстрируемом варианте осуществления основанные на постоянном токе измерения емкости между стационарной и вращающейся компонентами 62 и 82 преобразуются в изменяющиеся во времени измерения емкости, основанные на опорном геометрическом элементе 86, имеющем заранее заданную глубину. В определенных вариантах осуществления опорный геометрический элемент 86 может содержать материал, отличный от материала вращающейся компоненты 82. Например, опорный геометрический элемент 86 может содержать выемку на вращающейся компоненте 82, которая заполнена диэлектрическим материалом. Фиг.8 является графическим представлением емкости 88, измеренной системой измерения зазора по фиг.4, от ротора по фиг.7. Ось 90 ординат емкостных измерений 88 представляет величину емкости, измеренную датчиком 64 от вращающейся компоненты 82, а ось 92 абсцисс представляет временной период. В настоящем варианте осуществления первый сигнал, генерированный датчиком 64, представляет первую емкость, измеренную от вращающейся компоненты 82 и обозначенную ссылочной позицией 94. Первая емкость представляет зазор между датчиком 64 и вращающейся компонентой 82 (например, непрерывной круглой геометрией). Более того, датчик 64 также генерирует второй сигнал, представляющий вторую емкость, измеренную от опорного геометрического элемента 86 (например, выемки или разрыва в непрерывной круглой геометрии), которая обозначена ссылочной позицией 96. В этом варианте осуществления вторая емкость соответствует глубине 98 опорного геометрического элемента 86. Разность в первой и второй емкостях, измеренная датчиком 64, и заранее заданная глубина 98 опорного геометрического элемента 86 используются для определения зазора между стационарной и вращающейся компонентами 62 и 82.
Как будет понятно специалистам в данной области техники, когда увеличивается зазор, разница между измерениями от вращающейся компоненты 82 и опорного геометрического элемента 86 будет уменьшаться. Аналогичным образом, когда уменьшается зазор, такая разница между двумя измерениями будет увеличиваться. Обычно измеренные емкости обратно пропорциональны в зазоре между стационарной и вращающейся компонентами 62 и 82. Поэтому если в приведенном в качестве примера варианте осуществления зазор между стационарной и вращающейся компонентами 62 и 82 удваивается, разница между измеренными емкостями между стационарной и вращающейся компонентами 62 и 82 будет снижена в 0,5 раза. Нижеприведенный пример иллюстрирует влияние изменения в зазоре между стационарной и вращающейся компонентами 62 и 82 на измеренные разницы между измеренными емкостями.
Пример 1
В приведенном в качестве примера вращающемся машинном оборудовании выходной сигнал датчика от датчика 64, соответствующий вращающейся компоненте 83 на расстоянии "а" от датчика 64, представлен величиной "х". Более того, выходной сигнал датчика, соответствующий днищу опорного геометрического элемента 86 (имеющей глубину "b") на расстоянии "а+b", представлен величиной "у". Допуская, что зазор между стационарной и вращающейся компонентами 62 и 82 изменяется на "2а", то измерение от датчика 64, соответствующее такому зазору, будет равно "х/2". В этом варианте осуществления днище опорного геометрического элемента 86 будет находиться на расстоянии "2а+b" от датчика 64. Поэтому разность в сигнале, соответствующая вращающейся компоненте 82 и опорному геометрическому элементу 86 в первом случае (на расстоянии а), будет равной "х-у". Аналогичным образом разность в сигнале для второго случая (на расстоянии 2а) будет равной "х/2-у". Поэтому разность между двумя измерениями будет составлять приблизительно х/2, что соответствует изменению зазора от "а" до "2а".
Таким образом, в иллюстрируемом варианте осуществления зазор определяется использованием разницы измерения между измеренными величинами емкости поблизости от опорного геометрического элемента 86 и величинами, удаленными от опорного геометрического элемента 86.
Фиг.9 иллюстрирует другое приведенное в качестве примера варианта осуществление вращающейся компоненты 100 паровой турбины по фиг.4 и 5. В иллюстрируемом варианте осуществления вращающаяся компонента 100 содержит многоуровневый опорный геометрический элемент, такой как ступенчатая выемка 102, размещенный вдоль непрерывной круглой конструкции 84 и прерывающий ее целостность. При работе датчик 64 генерирует сигналы, представляющие измеренную емкость, соответствующую вращающейся компоненте 100 (например, непрерывной круглой геометрии), и различные уровни многоуровневого опорного геометрического элемента 102. Впоследствии такие измерения могут быть использованы для оценки зазора между стационарной и вращающейся компонентами 72 и 100 на основании разности измерения между измеренными емкостями.
Фиг.10 является графическим представлением емкости 104, измеренной с помощью системы измерения зазора по фиг.3, от ротора по фиг.9 в соответствии с вариантами осуществления настоящих технических средств. В иллюстрируемом варианте осуществления датчик 64 генерирует сигнал, представляющий емкость, соответствующую непрерывной круглой поверхности вращающейся компоненты 100 (удаленной от многоуровневой конструкции 102), как это представлено ссылочной позицией 106. Кроме этого, датчик 64 генерирует сигналы, представляющие емкости, соответствующие уровням многоуровневой конструкции 102, как это представлено ссылочными позициями 108 и 110. Опять-таки, измеренные величины емкостей соответствуют заранее заданным глубинам 112 и 114 опорного геометрического элемента 102. Разность в измеренных емкостях, соответствующая уровням многоуровневой конструкции 102, и поверхность вращающейся компоненты 100 используются для определения зазора между стационарной и вращающейся компонентами 62 и 100. В иллюстрируемом варианте осуществления множество разностей в измеренных емкостях между поверхностью вращающейся компоненты 100 и множество уровней многоуровневой конструкции 102 получают для каждого поворота вращающейся компоненты 100. Более того, такие измерения обрабатывают, и соответствующие просмотровые таблицы могут быть использованы для определения зазора между стационарной и вращающейся компонентами 62 и 100 на основании разностей измерения и заранее заданных глубин 112 и 114 опорного геометрического элемента 102. Такое множество измерений разности, полученных для каждого поворота вращающейся компоненты, предпочтительно, по существу, увеличивает быстродействие системы измерения зазора.
Более того, посредством использования множества измерений (например, соответствующих разным уровням ступенчатой выемки 102) любые компоненты шума в измерении благодаря таким факторам, как дрейфы в электронике, изменения в свойствах материала стационарной и вращающейся компонент 62 и 100 и т.д., могут проявляться в одинаковой степени среди всех измерений и будут впоследствии сведены к нулю при оценке разности в измерениях. Таким образом, использование опорного геометрического элемента, такого как многоуровневая конструкция 102, обеспечивает, по существу, возможность измерения, устойчивого к ошибкам и нечувствительного к дрейфу, через систему измерения зазора.
Фиг.11 иллюстрирует другую приведенную в качестве примера конфигурацию 120 вращающейся компоненты, имеющей множество выемок, расположенных на и прерывающих целостность геометрии 84 непрерывной поверхности для паровой турбины по фиг.1. В представленной сейчас и рассматриваемой конфигурации вращающаяся компонента 120 содержит множество опорных геометрических элементов или выемок, таких, как представлено ссылочными позициями 122, 124, 126, 128 и 130. Например, вращающаяся компонента 120 может содержать многоступенчатую выемку 122 наряду с полукруглыми выемками 124, 126, 128 и 130, имеющими различные глубины для прерывания целостности непрерывной круглой структуры 84.
В иллюстрируемом варианте осуществления датчик 64 генерирует сигналы, представляющие емкости, соответствующие каждой из этих выемок 122, 124, 126, 128 и 130. Быстродействие системы измерения преимущественно увеличивается при использовании множества выемок 122, 124, 126, 128 и 130 в качестве множества разностей между измеренными параметрами, полученными для каждого поворота вращающейся компоненты 120. В определенных вариантах осуществления такое множество разностей может быть использовано в качестве средства для самокалибровки системы измерения зазора.
Более того, такие измеренные параметры (то есть емкости) впоследствии обрабатываются для определения зазора между стационарной и вращающейся компонентами 62 и 120, основанного на разностях измерения и предварительно заданных глубинах множества выемок 122, 124, 126, 128 и 130. В иллюстрируемом варианте осуществления множество измерений, основанное на множестве выемок 122, 124, 126, 128 и 130, имеющих заранее заданную геометрию, по существу, снижает влияние любых компонент шума при измерении. Например, шум при измерении из-за таких факторов, как дрейфы в электронике, изменения в свойствах материала стационарной и вращающейся компонент 62 и 120 и т.д., может быть, по существу, снижен при использовании множества выемок 122, 124, 126, 128 и 130. В частности, компоненты шума могут проявляться в одинаковой степени среди всех измерений и будут впоследствии сведены к нулю при оценке разности в измерениях. Таким образом, использование множества выемок на вращающейся компоненте 120 дает возможность получения, по существу, устойчивого к ошибкам и нечувствительного к дрейфу измерения через систему измерения зазора.
Обычно размер каждой выемки 122, 124, 126, 128 и 130 этого множества имеет тот же самый порядок, что и размер наконечника зонда, чтобы облегчить получение сигналов от днища выемок 122, 124, 126, 128 и 130 без воздействия сигналов от боковых стенок соответствующих выемок. Кроме того, размер каждой из этих выемок 122, 124, 126, 128 и 130 выбирается так, что эти выемки не влияют на динамику или рабочую характеристику вращающегося машинного оборудования, такого как паровая турбина. В общем, размер наконечника зонда обычно имеет тот же самый порядок, что и зазор, который измеряется. Например, для приложения паровой турбины наконечник зонда может иметь диаметр около 200 мил, а выемка может представлять собой полукруг с радиусом около 125 мил. То есть выемка может иметь ширину около 250 мил и представлять собой полукруг глубиной около 125 мил. В определенных вариантах осуществления, где используется множество выемок или где используется многоступенчатая выемка, размер ступени выемки может быть выбран так, что сигналы, соответствующие различным уровням, могут быть точно дифференцированы. Например, если используемый рабочий диапазон датчика составляет около 150 мил, а ожидаемый диапазон зазоров составляет приблизительно 100 мил, то размер ступенек в выемке может быть выбран в пределах 50 мил друг от друга, что превышает, по существу, рабочий диапазон датчика, так что будут распознаны различные уровни выемки.
Как проиллюстрировано выше, датчик 64 может быть использован для измерения емкостей, соответствующих вращающейся компоненте 120 и множеству опорных геометрических элементов, таких как 122, 124, 126, 128 и 130. В иллюстрируемом варианте осуществления датчик 64 представляет собой емкостной зонд. В некоторых вариантах осуществления емкостной зонд 64 содержит, по меньшей мере, два наконечника зонда для измерения осевого и радиального зазора между стационарной и вращающейся компонентами вращающегося машинного оборудования. Как обсуждалось выше, емкость между вращающейся компонентой 120 и датчиком 64 является функцией двух переменных, а именно функцией радиального зазора и осевого зазора. Поэтому посредством измерения емкости двух зондов предоставляется возможность получить фактические величины для переменных радиального зазора и осевого зазора.
Фиг.12 показывает вид в плане приведенной в качестве примера конфигурации 132 датчика 64, используемой для измерения зазора между стационарной и вращающейся компонентами в паровой турбине по фиг.1 и 4. В иллюстрируемом варианте осуществления датчик 132 содержит множество наконечников 134, 136, 138 и 140 емкостного зонда, которые могут содержать, например, электропроводные валы. Иллюстрируемые геометрия и относительные положения зондов 134, 136, 138 и 140 облегчают измерение большого диапазона осевого смещения, например, превышающего 0,5 дюймов, в то же время обеспечивая требуемую разрешающую способность для радиальных измерений, например для измерения смещений порядка 0,01 дюйма. Вышеупомянутый параметр является предпочтительным в приложениях, где осевые смещения вращающейся компоненты 14 существенно превышают радиальные смещения относительно кожуха 16.
В иллюстрируемом варианте осуществления зонды 134, 136, 138 и 140 размещены в шахматном порядке, имея конфигурацию ромбической формы, на головке датчика, чтобы максимизировать чувствительность к изменению в площади перекрытия. Другие ступенчатые конфигурации могут быть реализованы в вариантах осуществления, имеющих большее или меньшее число зондов. Диаметры зондов 134, 136, 138 и 140 на участке головки или наконечника являются соответственно достаточно большими для обеспечения адекватной поверхности перекрытия между ними и наконечником лопатки 14. В иллюстрируемом варианте осуществления, то есть в приложении для паровой турбины, зонды 134, 136, 138 и 140 могут быть образованы из материала, включающего никель, алюминий, кобальт или их сочетания, такого как ковар. Однако в приложениях, предполагающих высокие температуры (например, температуры, превышающие 1000°С), может быть использован материал для зондов 134, 136, 138 и 140, содержащий платину, родий или их сочетания.
Фиг.13 иллюстрирует приведенную в качестве примера конфигурацию 142 системы измерения зазора по фиг.1-4 в соответствии с вариантом осуществления настоящих технических средств. Система 142 измерения зазора содержит датчик 144, имеющий четыре наконечника 146, 148, 150 и 152 зонда, установленные в конфигурации ромбической формы, как упомянуто выше со ссылкой на фиг 12. Более того, генератор 154 сигнала связан с наконечниками 146, 148, 150 и 152 зонда для подачи входных возбуждающих сигналов к датчикам 146, 148, 150 и 152. В иллюстрируемом варианте осуществления генератор 154 сигнала содержит генератор, управляемый напряжением (ГУН). Сигналы возбуждения от генератора 154 сигнала могут быть переключены между наконечниками 146, 148, 150 и 152 зонда через переключатели 156, 158, 160 и 162. В некоторых вариантах осуществления наконечники 146, 148, 150 и 152 зонда одновременно возбуждаются через генератор 154 сигнала. Как вариант, наконечники 146, 148, 150 и 152 зонда могут возбуждаться в различные моменты времени для снижения перекрестных искажений между наконечниками 146, 148, 150 и 152 зонда.
Более того, усилители 164, 166, 168 и 170 могут быть связаны с генератором 154 сигнала для усиления входных сигналов, принимаемых соответственно наконечниками 146, 148, 150 и 152 зонда для измерения емкости через каждый из этих наконечников зонда. Более того, направленные ответвители 190, 192, 194 и 196 могут быть связаны с наконечниками 146, 148, 150 и 152 зонда для разделения поступающих и отраженных сигналов от соответствующих наконечников зонда.
При работе наконечники 146, 148, 150 и 152 зонда возбуждаются генератором 154 сигнала на частоте возбуждения. Частота возбуждения может быть выбрана на основании длины провода, емкости, геометрии наконечников 146, 148, 150 и 152 зонда, емкости статического измерения и других факторов. В настоящем варианте осуществления фазовые детекторы 174, 182, 184 и 186 имеют конфигурацию для обнаружений отраженных сигналов от наконечников 146, 148, 150 и 152 зонда на основании частоты возбуждения, чтобы генерировать первый сигнал, представляющий первый измеренный параметр, то есть емкость, от первого объекта, такого как поверхность вращающейся компоненты 14. Емкость на наконечниках 146, 148, 150 и 152 зонда измеряется посредством измерения разности фаз между сигналами возбуждения и соответствующими отраженными сигналами с помощью емкостей 172, 176, 178, 180 и фазовых детекторов 174, 182, 184 и 186. Аналогичным образом второй сигнал, представляющий второй измеренный параметр, то есть емкость, генерируется от опорного геометрического элемента, размещенного на вращающейся компоненте 14 посредством измерения разности фаз между сигналом возбуждения и соответствующим отраженным сигналом от опорного геометрического элемента. В некоторых вариантах осуществления может быть генерировано множество сигналов, соответствующих множеству уровней опорного геометрического элемента, размещенного на вращающейся компоненте 14, как иллюстрировано выше со ссылкой на фиг.9 и 10. В некоторых других вариантах осуществления может быть генерировано от датчика 144 множество сигналов, соответствующее множеству опорных геометрических элементов, размещенных на поверхности вращающейся компоненты 14, как было обсуждено выше со ссылкой на фиг.11.
Первый и второй сигналы, сгенерированные от датчика 144, могут быть затем обработаны через блок 198 обработки. Более того, частота сигналов возбуждения от генератора сигнала может быть отслежена и подвергнута управлению через блок 200 слежения за частотой. При работе блок 198 обработки принимает сигналы, представляющие измеренные емкости, соответствующие вращающейся компоненте 14 и опорным геометрическим элементам, размещенным на вращающейся компоненте 14. Более того, блок 198 обработки оценивает зазор между вращающейся и стационарной компонентами 14 и 16 на основании разности измерения между измеренными емкостями от вращающейся компоненты 14 и опорных геометрических элементов. Более конкретно, такие измеренные емкости обрабатывают для определения зазора между стационарной и вращающейся компонентами 14 и 16 на основании разностей измерения и заранее заданных размеров опорных геометрических элементов.
Измерения, основанные на взятых за опорные геометрические элементы, имеющие заранее заданный размер, существенно снижают влияние каких-либо компонент шума при измерении из-за таких факторов, как дрейфы в электронике, изменения в свойствах материала стационарной и вращающейся компонент 14 и 16 и т.д. В иллюстрируемом варианте осуществления компоненты шума могут проявляться в одинаковой степени среди всех измерений, и они будут впоследствии сведены к нулю во время оценки разности в измерениях. Таким образом, в этом варианте осуществления изменяющиеся во времени сигналы, принятые блоком 198 обработки, подвергаются обработке, и извлекаются параметры сигнала. В этом варианте осуществления параметры сигнала содержат уровень опорной линии и высоту выемки. Более того, извлеченная высота выемки сравнивается с заранее заданным размером выемки. Когда измеренная высота выемки будет промасштабирована в зависимости от зазора, зазор может быть определен с использованием одного из нескольких методов. Методы включают просмотровую таблицу, аналитическую/основанную на физике модель, или функцию вычерчивания кривой по точкам. Как описано выше, множество таких опорных геометрических элементов может быть использовано, и через заранее заданный размер таких опорных геометрических элементов блок 198 обработки определяет зазор, необходимый для получения измеренного масштабирования упомянутого опорного геометрического элемента. Поэтому любая ошибка измерения, которая, например, вносит фиксированное смещение на протяжении сравнительно длительного времени (не изменяющаяся во времени, или медленно изменяющаяся ошибка) будет исключена, так как обработку проводят с использованием разности в измерениях, а не абсолютной величины измерений. Аналогичным образом любая ошибка усиления может быть также исключена, когда используется многоуровневая геометрия, так как обработку проводят над множеством разностей параметра глубин. В общем, ошибки смещения (медленно изменяющиеся ошибки) могут быть исключены при использовании простой выемки, а ошибки усиления/масштабирования могут быть исключены при использовании многоуровневой геометрии.
Таким образом, посредством прерывания целостности геометрии непрерывной поверхности вращающейся компоненты 14 опорного геометрического элемента, система 142 измерения зазора преобразует основанные на постоянном токе измерения емкости между вращающейся и стационарной компонентами 14 и 16 в изменяющиеся во времени измерения емкости. Более конкретно, прерывание целостности геометрии непрерывной поверхности через опорный геометрический элемент вносит выброс в сигнал, образованный емкостными зондами, который может быть использован для самокалибровки системы измерения и обеспечения того, чтобы измерения не подвергались воздействия дрейфов сигнала.
Как обсуждалось выше, такие изменяющиеся во времени измерения емкости используются для оценки зазора между вращающейся и стационарной компонентами 14 и 16. В некоторых вариантах осуществления блок 198 обработки может использовать просмотровую таблицу или калибровочную кривую, или другие технические средства для оценки зазора на основании разности измерения между измеренными емкостями и заранее заданными размерами опорных геометрических элементов, размещенных на вращающейся компоненте 14. Более того, блок 202 управления зазором может быть связан с блоком 198 обработки для управления зазором между вращающейся и стационарной компонентами на основании зазора, оцененного блоком 198 обработки.
Фиг.14 является графическим представлением выходного сигнала 204 датчика, измеренного системой измерения зазора по фиг.13 в соответствии с вариантами осуществления настоящих технических средств. Ось ординат выходного сигнала 204 представляет измеренную высоту 206 выемки от наконечников зонда, а ось абсцисс представляет осевой зазор 208, измеренный в милах между вращающейся и стационарной компонентами 14 и 16. В иллюстрируемом варианте осуществления кривые 210 и 212 представляют высоту выемки, измеренную от двух наконечников 136 и 140 зонда, которые размещены в том же самом радиальном положении, как показано на фиг.12. Более того, кривые 214 и 216 представляют высоту выемки, измеренную от наконечников 138 и 134 зонда, которые размещены с левой и с правой стороны наконечников 136 и 140 зонда. В настоящем варианте осуществления измеренная высота 206 выемки является мерой зазора между стационарным и вращающимся объектами.
Как это проиллюстрировано, электрическая характеристика опорного геометрического элемента, такого как выемка, которая представлена высотой 206 выемки, изменяется согласно высоте выемки, которая, в свою очередь, является функцией осевого и радиального смещения. Например, когда наконечник 136 зонда, по существу, приближается к выемке, сигнал, принятый от наконечника зонда, будет представлен кривой 218. Более того, когда наконечник 136 зонда удаляется от выемки, сигналы будут представлены кривыми 220 и 224. Таким образом, сигнал, принятый от выемки, изменяется согласно высоте выемки и расстоянию выемки от наконечников 134, 136, 138 и 140 зонда. Когда увеличивается радиальный зазор между вращающейся и стационарной компонентами, измеренный выходной сигнал от наконечников 134, 136, 138 и 140 зонда будет снижаться. Например, увеличение в радиальном смещении, представленном ссылочной позицией 226, отражается в сигналах 218, 220, 222 и 224 от наконечника 136 зонда. Аналогичным образом сигналы от наконечников 134, 138 и 140 зонда изменяются в ответ на высоту выемки и расстояние от наконечников зонда, как представлено кривыми 210, 212 и 216.
Различные аспекты способа, описанные выше, находят применение в различных приложениях. Например, технические средства, проиллюстрированные выше, могут быть использованы для измерения зазора между вращающейся и статической компонентами в паровой турбине. Технические средства могут быть также использованы в некоторых других приложениях, например, для измерения зазора между стационарной и вращающейся компонентами в генераторах. Как упомянуто выше, в даже более широком смысле, описанный здесь способ может быть предпочтительно использован для обеспечения точного измерения зазора между объектами через датчики посредством преобразования основанных на постоянном токе измерений емкости между стационарной и вращающейся компонентами, в изменяющиеся во времени измерения емкости на основании, по меньшей мере, одного опорного геометрического элемента, прерывающей геометрию непрерывной поверхности вращающейся компоненты. Более того, эти технические средства оказываются более предпочтительными для обеспечения системы самокалибрующегося датчика для точного измерения зазора деталей даже при эксплуатации, и в течение длительных периодов времени, обеспечивая возможность более надежного управления зазором в деталях во время эксплуатации.
Хотя были проиллюстрированы и описаны лишь некоторые признаки изобретения, для специалистов в данной области техники будут очевидны многие модификации и изменения изобретения. Поэтому следует считать, что прилагаемая формула изобретения предназначена для охвата всех таких модификаций и изменений в истинных рамках изобретения.
Перечень деталей
10 - паровая турбина,
12 - система измерения зазора,
14 - вращающаяся компонента,
16 - стационарная компонента,
20 - паровая турбина без держателя,
22 - ступени паровой турбины,
24 - вращающиеся лопасти,
26 - направление вращения,
30 - генератор,
32 - узел корпуса,
34 - узел ротора,
36 - вал ротора,
38 - сердечник ротора,
40 - пластины ротора,
42 - узел статора,
44 - направление вращения,
46 - обмотки статора,
50 - паровая турбина,
52 - ротор,
54 - вал,
56 - вращающиеся лопасти,
58 - пар,
60 - ось вращения,
62 - корпус/держатель,
64 - датчики,
70 - паровая турбина - конфигурация статора/ротора,
72 - герметизирующий зуб,
74 - паз статора,
76 - подробный вид,
78 - радиальный зазор,
80 - осевой зазор,
82 - ротор, имеющий выемку,
84 - непрерывная поверхность ротора,
86 - выемка,
88 - измерение емкости/зазора в зависимости от времени,
90 - емкость/зазор,
92 - время,
94 - сигнал от поверхности,
96 - сигнал от выемки,
98 - глубина выемки,
100 - ротор, имеющий многоступенчатую выемку,
102 - многоступенчатая выемка,
104 - измерение емкости/зазора в зависимости от времени,
106 - сигнал от поверхности,
108 - сигнал от выемки,
110 - сигнал от выемки,
112 - первая глубина выемки,
114 - вторая глубина выемки,
120 - ротор, имеющий множество выемок,
(122-130) - выемки,
132 - датчик,
(134-140) - наконечники зонда,
142 - система измерения зазора,
(146-152) - наконечники зонда,
154 - ГУН,
(156-162) - переключатель,
(164-170) - усилитель,
(172-180) - конденсатор,
(190-196) - ответвитель направления,
(174-186) - фазовый детектор,
198 - цепь обработки,
200 - слежение за частотой,
202 - блок управления зазором,
204 - выходной сигнал датчика в зависимости от осевого зазора,
206 - выходной сигнал датчика,
208 - осевой зазор,
210 - выходной сигнал от наконечника 1,
212 - выходной сигнал от наконечника 3,
214 - выходной сигнал от наконечника 4,
216 - выходной сигнал от наконечника 2,
(218-224) - выходной сигнал от наконечника 1 датчика,
216 - увеличение радиального зазора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕНСОРНАЯ СИСТЕМА И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 2005 |
|
RU2392651C2 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ МНОЖЕСТВЕННЫХ ПАРАМЕТРОВ ТУРБОМАШИННОЙ СИСТЕМЫ | 2009 |
|
RU2513646C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СЕТЕЙ КОМПОНЕНТОВ ТУРБИНЫ | 2008 |
|
RU2482307C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗАЗОРА ДО ВЕРШИН ЛОПАТОК ТУРБИНЫ | 2002 |
|
RU2237866C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОПЕРЕЧНОЙ ВИБРАЦИИ И УГЛОВОЙ ВИБРАЦИИ, СПОСОБ ИЗМЕРЕНИЯ КРУТИЛЬНОЙ ВИБРАЦИИ И РОТОДИНАМИЧЕСКАЯ МАШИНА | 2010 |
|
RU2539719C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ДЕФОРМАЦИЙ КОМПОНЕНТА ТУРБИНЫ | 2013 |
|
RU2562327C2 |
| РАБОЧЕЕ КОЛЕСО ТУРБИНЫ | 2021 |
|
RU2754882C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТЕКУЩЕГО КОНТРОЛЯ ВРАЩАЮЩИХСЯ МАШИН | 2007 |
|
RU2449454C2 |
| ПЛАВАЮЩИЙ ЗОНД ДЛЯ УЛЬТРАЗВУКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2004 |
|
RU2375004C2 |
| УСТАНОВКА, СОДЕРЖАЩАЯ ВРАЩАТЕЛЬНЫЙ МЕХАНИЗМ, И УСТАНОВКА, СОДЕРЖАЩАЯ РОТОР | 2010 |
|
RU2535589C2 |
Изобретение относится к измерительной технике и может быть использовано для измерения зазора между стационарной и вращающейся компонентами машины (турбины, генератора и т.п.). Сущность: система содержит опорный геометрический элемент, размещенный на первом объекте, имеющем в остальном непрерывную геометрию поверхности. Непрерывная геометрия поверхности представляет собой круглую структуру. Опорный геометрический элемент содержит многоуровневую структуру, имеющую множество различных уровней. На втором объекте размещен датчик, выполненный с возможностью генерирования первого сигнала, представляющего первый измеренный параметр от первого объекта, и второго сигнала, представляющего второй измеренный параметр от опорного геометрического элемента. Блок обработки выполнен с возможностью обработки первого и второго сигналов, чтобы оценить зазор между первым и вторым объектами на основании разности измерения между первым и вторым измеренными параметрами. Система измерения зазора выполнена с возможностью измерения зазора по мере того, как первый объект совершает движение относительно второго объекта. Технический результат: повышение точности. 7 з.п. ф-лы, 14 ил.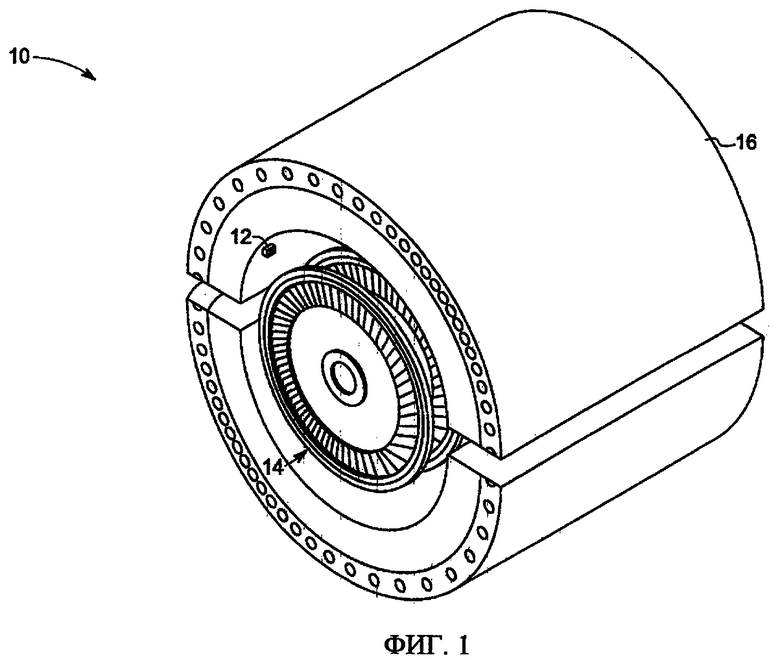
1. Система измерения зазора, содержащая:
опорный геометрический элемент, размещенный на первом объекте, имеющем в остальных случаях непрерывную геометрию поверхности, причем в остальных случаях непрерывная геометрия поверхности содержит круглую структуру, причем опорный геометрический элемент содержит многоуровневую структуру, имеющую множество различных уровней относительно в остальных случаях непрерывной геометрии поверхности, или их комбинацию;
датчик, размещенный на втором объекте, причем датчик выполнен с возможностью генерирования первого сигнала, представляющего первый измеренный параметр от первого объекта, и второго сигнала, представляющего второй измеренный параметр от опорного геометрического элемента, и
блок обработки, выполненный с возможностью обработки первого и второго сигналов, чтобы оценить зазор между первым и вторым объектами на основании разности измерения между первым и вторым измеренными параметрами, причем система измерения зазора выполнена с возможностью измерения зазора по мере того, как первый объект совершает движение относительно второго объекта.
2. Система по п.1, в которой первый объект содержит вращающуюся деталь, а второй объект содержит стационарную деталь, расположенную вокруг вращающейся детали в турбине.
3. Система по п.1, дополнительно содержащая:
источник возбуждения, выполненный с возможностью подачи сигналов возбуждения к датчику,
фазовый детектор, выполненный с возможностью обнаружения множества отраженных сигналов из соответствующих сигналов первого объекта и опорного геометрического элемента, и выполнения множества измерений фазы, чтобы определить фазу между каждым из отраженных сигналов и соответствующих сигналов возбуждения.
4. Система по п.1, в которой датчик является емкостным зондом, а первый и второй измеренные параметры являются емкостями.
5. Система по п.4, в которой емкостной зонд содержит по меньшей мере два наконечника зонда для измерения осевого и радиального зазоров.
6. Система по п.1, в которой каждый из множества опорных геометрических элементов содержит разные глубины, утопленные ниже в остальных случаях непрерывной геометрии поверхности.
7. Система по п.1, в которой блок обработки содержит просмотровую таблицу или калибровочную кривую, или аналитическую модель, или вычисление, или комбинацию вышеперечисленного для оценки зазора между первым и вторым объектами на основании разности измерения между первым и вторым измеренными параметрами.
8. Система по п.1, дополнительно содержащая блок управления зазором, связанный с блоком обработки для управления зазором между первым и вторым объектами на основании зазора, оцененного блоком обработки.
| US 4987555 А, 22.11.1991 | |||
| US 6848193 В1, 01.02.2005 | |||
| US 4181948 В1, 04.04.1989 | |||
| Устройство для измерения радиального зазора турбомашины | 1977 |
|
SU667800A1 |
| Емкостный преобразователь радиальных зазоров турбомашины | 1984 |
|
SU1193451A1 |
| Способ измерения радиальных зазоров в турбомашинах | 1990 |
|
SU1779908A1 |

