Предлагаемое изобретение относится к средствам охранной сигнализации и автоматизации контрольно-пропускных пунктов режимных объектов.
В настоящее время для решения задачи обнаружения несанкционированного проноса радиоактивных веществ, например на атомных электростанциях, на их контрольно-пропускных пунктах применяются пешеходные портальные мониторы гамма-излучения, которые выпускаются многими зарубежными и отечественными фирмами. Например, РМ 700HS и IPM-21A (США), PSM R11 (Франция), КПРМ-П1 (Россия), ППМ-01 (Россия), СРМ-1 (Россия), РМ 5000-06 (Беларусь) и т.д. Принцип их действия основан на сборе информации об ионизации, вызванной гамма-излучением в рабочих объемах чувствительных элементов детекторов при размещении последних в пространстве, подлежащем контролю. Наибольшее распространение в таких мониторах получили органические сцинтилляционные детекторы на основе пластмасс и неорганические на основе йодистого натрия NaI(Tl) и йодистого цезия CsI(Na), CsI(Tl), которые формируют в применяемом веществе фотовспышки, регистрируемые фотоэлектронным усилителем.
Традиционно все известные портальные мониторы гамма-излучения выполнены в виде рамки-портала, через которую и осуществляется проход. В боковых стенках портала размещается, как правило, четыре сцинтилляционных детектора (по два с каждой стороны друг над другом), а также необходимое оборудование для преобразования, обработки сигналов и принятия решения с конечным его отображением на информационном табло, снабженном звуковым извещателем. Практически все мониторы данного класса в своем составе содержат «датчик присутствия», формирующий зону контроля в плоскости рамки для прохода, по сигналу с которого производится переключение режимов работы устройства: «Режим измерения естественного фона» (при отсутствии человека в контролируемом пространстве) и «Режим обнаружения» (при совершении прохода через «рамку» устройства).
Решение о факте обнаружения радиоактивного источника в простейшем случае принимается, если:
Nc-Nф≥Мпо,
где Nф - интенсивность импульсов счета фона;
Nc - интенсивность импульсов счета при проходе;
Мпо - порог обнаружения.
Для повышения точности измерений вычисление уровня фона производится с большой постоянной времени, минимум на порядок большей времени непосредственного прохода (~0,6-0,8 с). На практике для получения уровня ложной тревоги примерно 0,6/10000 (ориентировочно 4 значения «σ» - среднеквадратичного отклонения измеренного уровня естественного фона) должно выполняться соотношение:
Тф/Ти=60,
где Тф - время накопления при измерении фона;
Ти - время непосредственного измерения при проходе.
В некоторых случаях (при значительном времени Ти) минимально допустимым значением Тф считается величина, реализующая следующее неравенство: Тф>10 Ти.
Таким образом, традиционно известные устройства-аналоги содержат корпус, в боковых стенках которого размещаются детекторы ионизирующего излучения, датчик присутствия человека в зоне контроля, блок обработки информации и информационное табло, снабженное необходимыми индикаторами и звуковым извещателем тревожного состояния. Недостатком подобных устройств является невозможность получения информации о местонахождении источника ионизирующего излучения у человека, осуществляющего его несанкционированный пронос.
Попытка решения подобной проблемы предпринята в портальном радиационном мониторе, описанном в патенте на полезную модель RU 9318, выбранном в качестве ближайшего аналога, в котором для решения задачи определения места расположения источника ионизирующего излучения в движущемся объекте детектирующие модули расположены в мониторе неравномерно. Модули расположены с частичным перекрытием в средней части колонн и большим количеством детектирующих модулей в нижней части колонн по сравнению с верхней. Такое расположение детекторов позволит обеспечить лучшую вероятность обнаружения радиоактивных материалов в обуви и фактическом экранировании излучения телом человека. Данное техническое решение практически никак не устраняет известный недостаток портальных мониторов и, кроме того, не сможет быть использовано в специальных портальных мониторах, предназначенных для контроля транспорта, в том числе малогабаритного, и крупногабаритных предметов, перемещающихся через монитор по ленте транспортера.
Технический результат, ожидаемый от использования предлагаемого изобретения, заключается в повышении надежности и расширении функциональных возможностей стационарных гамма-мониторов, в первую очередь стационарных гамма-мониторов, используемых в пешеходных контрольно-пропускных пунктах, за счет применения решений, позволяющих обнаруживать не только факты несанкционированного проноса радиоактивных веществ или предметов, но и определять их месторасположение в конкретном месте по высоте на теле или в одежде человека.
Технический результат достигается за счет использования в конструкции портального монитора подвижной сканирующей платформы с установленным на ней детектором ионизирующего излучения, которая перемещается в пространстве по высоте за стоящим в зоне контроля человеком.
Предлагаемое устройство охранной сигнализации для обнаружения фактов несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах режимных объектов содержит каркас с N детекторами ионизирующих излучений, где N - целое число, большее или равное единице, блок обработки информации и управления, датчик присутствия человека в зоне контроля устройства и информационное табло со звуковым извещателем.
В отличие от известных технических решений устройство включает подвижную сканирующую платформу, выполненную с возможностью ее автоматического перемещения в пространстве по высоте по механическим направляющим, на которой размещается детектор ионизирующих излучений. Для обеспечения перемещения платформы устройство включает датчик-энкондер, определяющий положение подвижной сканирующей платформы в пространстве, опоры для фиксации платформы в ее нижнем (исходном) положении и датчик, сигнализирующий о факте нахождения платформы в нижнем положении и датчик фиксации верхней точки подъема подвижной сканирующей платформы.
При этом к первому входу блока обработки информации и управления устройства подключены выходы N-детекторов ионизирующих излучений. Ко второму входу блока обработки информации и управления подключен выход датчика присутствия человека в зоне контроля устройства. К третьему входу блока обработки информации и управления подключен информационный выход датчика-энкондера. К четвертому входу блока обработки информации и управления подключен выход датчика фиксации нижнего положения подвижной сканирующей платформы. К пятому входу блока обработки информации и управления подключен выход датчика фиксации верхней точки подъема подвижной сканирующей платформы. Первый выход блока обработки информации и управления подключен к выходу информационного табло со звуковым извещателем. Второй и третий выходы блока обработки информации и управления подключены к входам коммутационных элементов управления электродвигателем привода. Четвертый выход блока обработки информации и управления подключен к управляющему входу стабилизатора тока блока питания электродвигателя.
Предложенное изобретение поясняется чертежами:
на фиг.1 приведена конструктивная схема предлагаемого устройства;
на фиг.2 приведена структурно-функциональная схема предлагаемого устройства.
Устройство охранной сигнализации содержит несущий каркас 1 с размещенной в нем подвижной сканирующей платформой 2, перемещающейся по направляющим 3 из нижней части каркаса в верхнюю и обратно. Детектор ионизирующих излучений 4 устанавливается на подвижной сканирующей платформе 2. Опоры 5 предназначены для фиксации платформы 2 в ее нижнем исходном положении. Датчик 6 обеспечивает выдачу информации о фиксации нижнего положения платформы 2. Датчик 7 обеспечивает выдачу информации о фиксации верхней точки подъема платформы 2. Для привода платформы 2 используется электродвигатель постоянного тока 8 с редуктором 9 и рабочим валом 10, на который наматываются гибкие тросы или ленты 11, закрепленные одними концами на валу 10, а другими концами на платформе 2 в точках «С». Опорный подшипник 28 фиксирует рабочий вал 10 электродвигателя 8. Датчик-энкондер (преобразователь «угол-код») 12 с выходом ВЫХ. «Э» обеспечивает формирование дискретных сигналов, например кода Грея, пропорциональных высоте подъема подвижной сканирующей платформы 2. Питание электродвигателя 8 обеспечивает блок питания 13, имеющий управляемый стабилизатор тока (выход «СТ») - для питания двигателя 8 и стабилизатор напряжения (выход «СН») - для питания необходимыми напряжениями остального оборудования данного устройства.
Информационное табло 14 со звуковым извещателем обеспечивает индикацию состояния устройства с отображением необходимых данных. Датчик 15 присутствия человека в зоне контроля «D» обеспечивает контроль нахождения человека при проведении проверок. Блок обработки информации и управления 16 формирует на выходах 19 и 20 сигналы управления коммутационными элементами (реле) 17 и 18, подключающими источник тока блока питания 13 к двигателю 8 и переключающими полярность источника тока двигателя 8 для обеспечения движения платформы 2 соответственно в верхнее положение и обратно. Сигналы о результатах контроля поступают с выхода 26 на вход информационного табло 14. Блок обработки информации и управления 16 имеет вход 21 для подключения датчика 6 фиксации исходного нижнего положения подвижной платформы 2, вход 22 - для подключения датчика 7 фиксации верхней точки подъема платформы 2, вход 23 - для подключения выхода «ВЫХ «ДРК» детектора ионизирующих излучений 4, формирующего импульсы счета, вход 24 - для подключения выхода «ВЫХ «ДЗК» датчика 15 присутствия человека в зоне контроля устройства, вход 25 - для подключения выхода «ВЫХ «Э» датчика-энкондера 12 и выход 27 для его подключения к входу «ВХ «УСТ» блока питания 13, предназначенного для обеспечения управления током двигателя 8 в разные фазы движения подвижной платформы 2.
Устройство работает следующим образом.
В исходном состоянии, после подачи на устройство питающего напряжения на выходе стабилизатора напряжения «ВЫХ«СН» блока питания 13, появляется рабочее напряжение, которое поступает на цепи питания «Uпит.» детектора ионизирующих излучений 4, датчика-энкондера 12, информационного табло 14, датчика 15 присутствия человека в зоне контроля устройства и блока обработки информации и управления 16. При этом на вход «ВХ «УСТ» блока питания 13 с выхода 27 блока обработки информации и управления 16 поступает управляющий сигнал логической единицы, по которому блок 16 переходит в режим готовности. На выходе блока 16 «ВЫХ «СТ» формируется некоторое начальное напряжение, определяемое характеристиками стабилизатора тока при его работе на холостом ходу. Это объясняется тем, что ток в нагрузке из-за нахождения контактов коммутационных элементов 17, 18 в исходном состоянии в этот момент полностью отсутствует (фиг.2).
В это же время с детектора ионизирующих излучений 4 на вход 23 блока обработки информации и управления 16 начинают непрерывно поступать импульсы счета с частотой, пропорциональной уровню естественного радиационного фона, которая определяется характеристикой чувствительности примененного детектора 4. При условии, что человек в зоне чувствительности «D» датчика 15 отсутствует (фиг.1), с выбранным временем накопления Тф происходит подсчет количества импульсов и вычисление конкретного значения фона.
Если контроль прохода не осуществляется, то процесс измерения фона повторяется и каждое последующее полученное значение сравнивается с предыдущим значением и допустимым порогом девиаций. В результате уточняется его абсолютная величина. Такой принцип позволяет улучшить статистику и уменьшить вероятность осуществления «обмана» монитора посредством незаметного приближения к зоне контроля нарушителем внешнего источника перед проходом, позволяющего «переобучить» устройство на более высокое значение фона и, таким образом, осуществить впоследствии несанкционированный пронос радиоактивного вещества или материала. Указанные измерения и уточнения осуществляются постоянно при отсутствии проходов.
Если при вычислении значений естественного фона наблюдается устойчивая тенденция к его увеличению или превышен допустимый предел, то на выходе 26 блока обработки информации и управления 16 формируется сигнал, поступающий на информационное табло 14, который отображается в виде сообщения «Превышен фон». При этом будет также включен и звуковой сигнал определенной тональности.
Если процесс начального измерения фона завершился успешно, то на информационном табло 14 появляется разрешающий сигнал и можно осуществлять контроль проходящих лиц на предмет обнаружения несанкционированного проноса источников излучений. При появлении человека в зоне чувствительности «D» датчика 15 на его выходе «ВЫХ «ДЗК» появляется сигнал, который поступает на вход 24 блока обработки информации и управления 16. При этом на выходе 20 блока 16 формируется сигнал включения коммутационного элемента 17. До этого момента якорь двигателя 8 через перекидные и далее нормально замкнутые контакты коммутационных элементов 17 и 18 был замкнут накоротко и его вращение в ту или иную сторону было исключено.
В момент переключения перекидного контакта коммутационного элемента 17 и его замыкания с нормально разомкнутым контактом, подключенным к общей шине устройства (⊥) образуется цепь питания и стабилизации тока двигателя 8: выход стабилизатора тока «ВЫХ«СТ» источника питания 13 - нормально замкнутые контакты коммутационного элемента 18 - якорь двигателя 8 и общая шина. При этом ось двигателя 8 начинает вращаться, приводя в движения и выходной вал редуктора 9 (с передаточным коэффициентом, свойственным конкретному типу редуктора 9), рабочий вал 10 также приходит в движение, наматывая на себя тросы 11. Вращение вала 10 заставляет подвижную платформу 2 с закрепленным на ней детектором ионизирующего изучения 4 перемещаться по направляющим 3 вверх до момента срабатывания датчика 7 фиксации верхней точки подъема подвижной сканирующей платформы 2. При этом стабильность и плавность ее движения определяются стабильностью тока в цепи питания двигателя 8, формируемого стабилизатором тока блока питания 13, а скорость движения платформы 2 (в данном случае вверх) - конкретным значением тока на выходе «ВЫХ«СТ», задаваемого первоначальной (исходной) уставкой, определяемой параметрами электродвигателя, редуктора и диаметром рабочего вала 10.
В момент начала движения подвижной сканирующей платформы 2 нормально замкнутый контакт датчика 6 фиксации исходного состояния платформы размыкается, на вход 21 блока обработки информации и управления 16 прекращает поступать сигнал, который ранее использовался для блокировки управления работой привода и создания условий для измерения естественного радиационного фона. В это же время начинает вращаться ось датчика-энкодера 12, механически соединенная с рабочим валом 10, и с выхода датчика «Вых. «Э» на вход 25 блока обработки информации и управления 16 начинают поступать данные (кодовые комбинации) о местонахождении подвижной сканирующей платформы 2 в пространстве (на высоте).
Диапазон перемещения платформы 2 из нижнего положения в верхнее разбивается на N зон. Для каждой такой зоны, определенной конкретными величинами значений «угол-код», записанными предварительно в память блока обработки информации и управления 16, в процессе движения подвижной платформы 2 производится подсчет импульсов, поступающих с детектора ионизирующих излучений 4, вычисляется разность Nc-Nф и результат сравнивается с пороговым значением Мпо. Все полученные данные записываются в оперативную память блока обработки информации и управления 16 для дальнейшего их использования по определенным правилам в процессе обратного хода платформы 2.
При подъеме подвижной платформы 2 на максимальную заданную высоту срабатывает датчик 7 фиксации факта достижения верхней точки подъема подвижной платформы 2 и на вход 22 блока обработки информации и управления 16 поступает на короткое время логический уровень нуля («общая шина»). Это вызывает отключение сигнала управления коммутационным элементом 17 на выходе 19 блока 16, включение сигнала управления коммутационным элементом 18 на выходе 20, а также формирование соответствующего сигнала на выходе 27 для управления стабилизатором тока блока питания 13 для осуществления движения платформы 2 вниз. В результате перекидной контакт коммутационного элемента 17 занимает исходное начальное положение, а перекидной контакт коммутационного элемента 18 переходит в позицию замыкания с ранее разомкнутым контактом. Такое состояние контактов коммутационных элементов 17 и 18 переключает направление протекающего через двигатель рабочего тока на обратное и платформа 2 начинает движение вниз. В этот же момент устанавливается другой режим работы стабилизатора тока блока питания 1 (режим формирования тока меньшего значения для осуществления движения платформы 2 вниз), т.к. вес платформы 2 будет помогать ее движению обратно к изначальной позиции. Величины токов при начальных уставках выбирают таким образом, чтобы время движения подвижной платформы 2 вверх было строго равно времени ее движения вниз.
В процессе перемещения платформы 2 к исходному положению также производятся подсчет импульсов, поступающих с детектора ионизирующих излучений 4 для каждой из зон, и соответствующие значения записываются в оперативную память блока обработки информации и управления 16, где осуществляются вычисления и/или уточняются значения полученных приращений к естественному радиационному фону для принятия окончательного решения. Такой принцип позволяет существенно снизить вероятность ложного обнаружения источника радиации и/или повысить чувствительность устройства за счет использования фактически двойного времени накопления сигналов в каждой из зон (возможен подсчет общего количества импульсов в каждой зоне при движении платформы 2 сначала вверх, а затем вниз). При достижении платформой 2 своего исходного положения на вход 21 блока обработки информации и управления 16 поступает сигнал логического нуля. При этом на выходе 19 блока 16 отключается сигнал управления коммутационным элементом 18 и его перекидной контакт возвращается в исходное состояние. В этом положении контактов ток в цепи: «Вых«СТ» блока питания 13 - двигатель 8 прекращается и последний переходит в режим «короткозамкнутого якоря», что обеспечивает его эффективное торможение и плавное опускание платформы 2 на опоры 5.
После завершения полного цикла перемещений подвижной платформы 2 «вверх-вниз» осуществляется процесс уточнения данных и формирования окончательного решения. При этом, если источник ионизирующего излучения обнаружен, то на выходе 26 блока обработки информации и управления 16 формируется сообщение о номере зоны, в которой обнаружен источник излучения, и о значимости (активности) источника, которое поступает на вход информационного табло 14. В такой ситуации отображается соответствующая информация на индикаторах информационного табло 14 и при необходимости (при тревоге) включается звуковой извещатель. Если источник излучения не обнаружен, то на табло выводится соответствующая информация и контролируемое лицо может выйти из зоны контроля «D» датчика 15 для своего дальнейшего следования.
В момент освобождения зоны контроля осуществляется переключение устройства в режим накопления и вычисления значения естественного фона. При этом возможны две ситуации. Если необходимо незамедлительно произвести следующий цикл измерения (в течение времени, меньшего чем время накопления фона Тф), то все расчеты устройством выполняются с использованием последнего измеренного значения фона. Если же следующий цикл измерения осуществляется с паузой, большей чем время накопления фона Тф, то при дальнейших расчетах используется уже обновленное значение естественного радиационного фона.
Таким образом, предложенное изобретение позволит не только обнаружить факты несанкционированного проноса нарушителями источников ионизирующего излучения через контрольно-пропускные пункты режимных объектов, но и индицировать места нахождения источников радиации на теле и/или в одежде человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПРОНОСА РАДИОАКТИВНЫХ ВЕЩЕСТВ НА КОНТРОЛЬНО-ПРОПУСКНЫХ ПУНКТАХ | 2009 |
|
RU2399094C1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПРОНОСА РАДИОАКТИВНЫХ ВЕЩЕСТВ НА КОНТРОЛЬНО-ПРОПУСКНЫХ ПУНКТАХ | 2008 |
|
RU2397547C2 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ФАКТОВ НЕСАНКЦИОНИРОВАННОГО ПРОНОСА РАДИОАКТИВНЫХ ВЕЩЕСТВ НА КОНТРОЛЬНО-ПРОПУСКНЫХ ПУНКТАХ | 2010 |
|
RU2435224C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЯДЕРНЫХ МАТЕРИАЛОВ И РАДИОАКТИВНЫХ ВЕЩЕСТВ | 2008 |
|
RU2364890C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2009 |
|
RU2407568C2 |
| Способ обнаружения и локализации подвижных источников ионизирующих излучений | 2018 |
|
RU2680671C1 |
| Комплекс системы контроля защитной оболочки энергоблока атомной электростанции | 2019 |
|
RU2733057C1 |
| Способ защиты электронной аппаратуры от радиоактивных излучений и устройство для реализации способа защиты электронных устройств от радиоактивных излучений | 2019 |
|
RU2733645C1 |
| Устройство для радиационной интроскопии | 1988 |
|
SU1679311A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2021 |
|
RU2761960C1 |
Устройство охранной сигнализации для обнаружения фактов несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах режимных объектов, содержащее каркас с детекторами ионизирующих излучений, блок обработки информации и управления, датчик присутствия человека в зоне контроля устройства и информационное табло со звуковым извещателем. В состав устройства дополнительно включена подвижная сканирующая платформа с детекторами ионизирующих излучений, перемещаемая по высоте по механическим направляющим электроприводом, датчик-энкондер, определяющий место нахождения платформы в пространстве, опоры и датчики фиксации подвижной сканирующей платформы в верхнем и нижнем ее положении. Технический результат - повышение вероятности обнаружения источников ионизирующих излучений и определение места их размещения на теле или в одежде человека. 2 ил.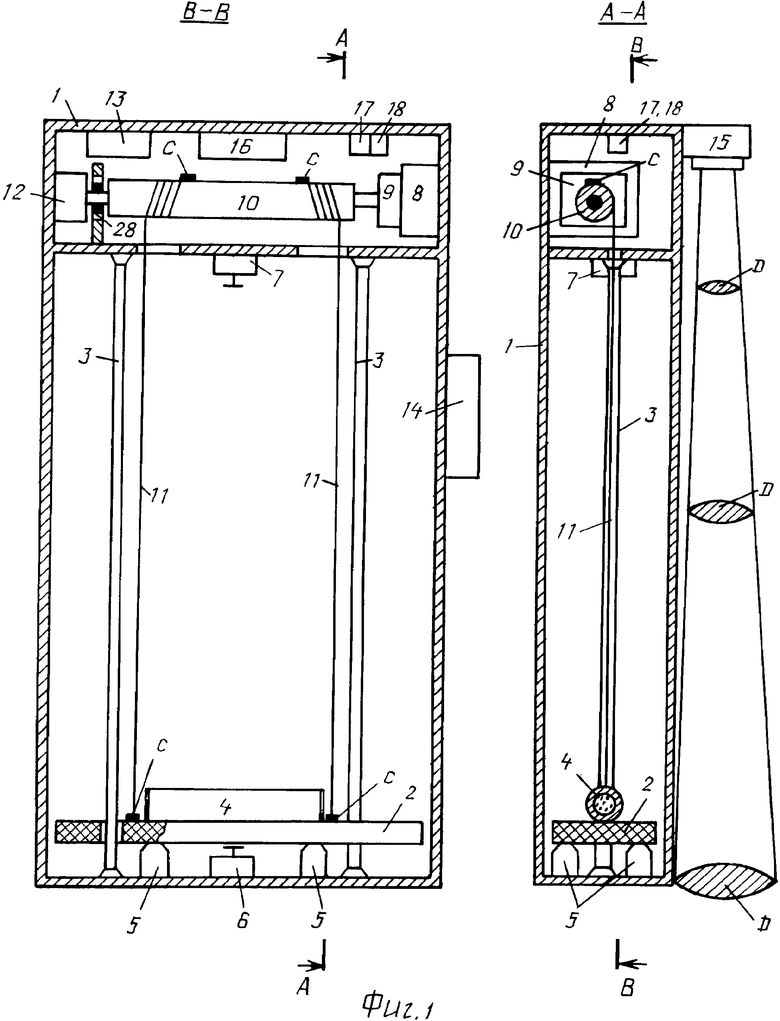
Устройство охранной сигнализации для обнаружения фактов несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах режимных объектов,
содержащее каркас с N детекторами ионизирующих излучений, где N - целое число большее или равное единице,
блок обработки информации и управления, датчик присутствия человека в зоне контроля устройства и информационное табло со звуковым извещателем,
отличающееся тем, что
устройство включает подвижную сканирующую платформу, выполненную с возможностью ее перемещения в пространстве по высоте по механическим направляющим, на которой размещается детектор ионизирующих излучений,
и датчик-энкондер, определяющий положение подвижной сканирующей платформы в пространстве,
опоры для фиксации платформы в нижнем (исходном) положении, датчик фиксации нижнего положения подвижной сканирующей платформы,
датчик фиксации верхней точки подъема подвижной сканирующей платформы,
причем блок обработки информации и управления выполнен с возможностью подсчета приращений к естественному радиационному фону, соответствующих величинам значений «угол-код»,
к первому входу блока обработки информации и управления подключены выходы детекторов ионизирующих излучений,
ко второму входу блока обработки информации и управления подключен выход датчика присутствия человека в зоне контроля устройства,
к третьему входу блока обработки информации и управления подключен информационный выход датчика-энкондера,
к четвертому входу блока обработки информации и управления подключен выход датчика фиксации нижнего положения подвижной сканирующей платформы,
к пятому входу блока обработки информации и управления подключен выход датчика фиксации верхней точки подъема подвижной сканирующей платформы,
первый выход блока обработки информации и управления подключен ко входу информационного табло со звуковым извещателем,
второй и третий выходы блока обработки информации и управления подключены к входам коммутационных элементов управления электродвигателем привода,
четвертый выход блока обработки информации и управления подключен к управляющему входу стабилизатора тока блока питания электродвигателя.
| Пневматический упорный каучуковый валок для шкуро- и коже-обрабатывающих машин | 1925 |
|
SU9318A1 |
| СПОСОБ КОНТРОЛЯ ГРУЗА В ЗАКРЫТЫХ КРУПНОГАБАРИТНЫХ ОБЪЕМАХ И УСТРОЙТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2239821C2 |
| US 6094472 A, 25.07.2000 | |||
| JP 2004069576 A, 04.03.2004 | |||
| US 7032011 B1, 12.06.2006. | |||

