Изобретение относится к области радиационной техники, а именно к средствам охранной сигнализации и автоматизации контрольно-пропускных пунктов (КПП), и предназначено для использования на контрольно-пропускных пунктах, например, режимных объектов, пограничной и таможенной служб и т.п. для обнаружения несанкционированного проноса радиоактивных веществ.
В настоящее время для решения задачи обнаружения несанкционированного проноса радиоактивных веществ, например, на атомных электростанциях, на их КПП применяются пешеходные портальные мониторы гамма-излучения, которые выпускаются многими зарубежными и отечественными фирмами. Например, РМ 700HS и IPM-21A (США), PSM R11 (Франция), КПРМ-П1, ППМ-01, СРМ-1 (Россия), РМ 5000-06 (Беларусь) и т.д. Принцип их действия основан на сборе информации об ионизации, вызванной гамма-излучением в рабочих объемах чувствительных элементов детекторов при размещении последних в пространстве, подлежащем контролю.
Традиционно такие мониторы выполнены в виде рамки-портала, через которую и осуществляется проход. В боковых стенках портала размещается, как правило, четыре сцинтилляционных детектора (по два с каждой стороны друг над другом), а также необходимое оборудование для преобразования, обработки сигналов и принятия решения, с конечным его отображением на информационном табло, снабженным звуковым извещателем. Практически все мониторы данного класса в своем составе содержат «датчик присутствия», формирующий зону контроля в плоскости «рамки» для прохода, по сигналу с которого производится переключение режимов работы устройства: «Режим измерения естественного фона» (при отсутствии человека в контролируемом пространстве) и «Режим обнаружения» (при совершении прохода через «рамку» устройства).
Существенным недостатком таких устройств является невозможность получения информации о местонахождении источника ионизирующего излучения, размещенного на теле или в одежде человека, осуществляющего его несанкционированный пронос, что требует (после формирования сигнала тревоги) применения дополнительных процедур с использованием ручных детекторов ионизирующего излучения.
Наиболее близким к предложенному изобретению является устройство охранной сигнализации для обнаружения несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах, позволяющее в процессе проверки обнаруживать в автоматическом режиме не только факты наличия источников ионизирующих излучений, но определять их места расположения (по высоте) на теле или в одежде человека (RU 2007143603, опубл. 10.08.2008).
В указанном выше устройстве используется подвижная сканирующая платформа с установленным на ней детектором (детекторами) ионизирующего излучения, которая перемещается электроприводом по высоте (по механическим направляющим) в пространстве за стоящим в зоне контроля человеком. Для обеспечения стабильного перемещения платформы в заданном диапазоне высот с определенной скоростью данное устройство включает в себя также датчик-энкондер, определяющий истинное положение подвижной сканирующей платформы в пространстве, специальный источник электропитания двигателя, опоры для фиксации платформы в ее нижнем положении, датчик, сигнализирующий о факте нахождения платформы в нижнем (исходном) положении, и датчик фиксации верхней точки подъема подвижной сканирующей платформы. Для осуществления управления процессом функционирования устройства и отображения результатов проверок в нем применяется датчик присутствия человека в зоне контроля, блок обработки информации и управления, а также информационное табло со звуковым извещателем.
Существенным недостатком указанных выше устройств является практическая невозможность обнаружения несанкционированного проноса источников ионизирующего излучения, при их размещении в специальных контейнерах, экранирующих излучение, выполненных, например, из свинца, толстостенной стали или других материалов, предназначенных для этой цели. Из специальной литературы известно, что для уменьшения уровня излучения урана-235 в 10 раз необходим слой железа толщиной 18 мм или кадмия толщиной 8 мм. Для снижения излучения плутония-239 также в 10 раз требуется слой свинца толщиной 6 мм или кадмия толщиной 12 мм. При решении вопросов биологической защиты от проникающей радиации обычно учитывается разница в механизмах взаимодействия альфа- и бета-излучений, гамма-квантов и нейтронов, что и предопределяет выбор соответствующих защитных материалов. В промышленности при изготовлении защитных контейнеров, ослабляющих интенсивность ионизирующих излучений, чаще всего применяются:
а) для радиоактивных веществ - гамма-излучателей - свинец, чугун и другие тяжелые металлы;
б) для радиоактивных веществ, излучающих нейтроны, - парафин, полиэтилен или иные водородсодержащие вещества с добавлением бора или кадмия;
в) для радиоактивных веществ - альфа- и бета-излучателей - алюминий, пластмассы, картон и другие материалы малой плотности.
Также для этих целей может достаточно эффективно использоваться целый ряд специальных полимерных материалов и растворов. Таким образом, является очевидным тот факт, что указанный выше способ незаметного проноса через места контроля источников ионизирующего излучения (с использованием защитных контейнеров или оболочек из экранирующих материалов) вполне реализуем нарушителями для практического осуществления злых умыслов.
Задача, на решение которой направлено предложенное изобретение, заключается в создании такого устройства охранной сигнализации для обнаружения несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах, которое исключало бы указанные выше недостатки.
Технический результат, достигаемый при реализации данного изобретения, заключается в повышении надежности и расширении функциональных возможностей обнаружителей несанкционированного проноса радиоактивных материалов и веществ с подвижной сканирующей платформой за счет применения в них решений, позволяющих выявлять в процессе проведения контрольных мероприятий любые попытки прохода нарушителей с источниками ионизирующих излучений, в том числе при их размещении в защитных контейнерах или экранах, снижающих уровень излучения.
Указанный технический результат достигается в устройстве охранной сигнализации для обнаружения фактов несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах, содержащем каркас с N-детекторами ионизирующих излучений, где N - целое число, большее или равное единице,
блок обработки информации и управления, датчик присутствия человека в зоне контроля устройства, информационное табло со звуковым извещателем,
подвижную сканирующую платформу, выполненную с возможностью ее перемещения в пространстве по высоте по механическим направляющим электроприводом, на которой размещается детектор ионизирующих излучений,
датчик-энкондер, определяющий положение подвижной сканирующей платформы в пространстве,
опоры для фиксации платформы в нижнем (исходном) положении, датчик фиксации нижнего положения подвижной сканирующей платформы и датчик фиксации верхней точки подъема подвижной сканирующей платформы,
по меньшей мере, два блока передающих и приемных рупорных экранированных антенн радиолокатора, работающего на принципах георадиолокации, размещенных в одной горизонтальной плоскости на определенном (заданном) расстоянии друг от друга на подвижной платформе совместно с, по меньшей мере, одним детектором ионизирующего излучения,
кнопку управления запуском устройства в работу и
блок коммутации и накопления сигналов георадара, к первому входу которого подключена приемная антенна первого блока антенн, ко второму входу - приемная антенна второго блока антенн, к третьему входу - выход датчика фиксации нижнего положения подвижной платформы в пространстве, к четвертому входу - выход датчика фиксации ее в верхней позиции подъема, к пятому входу - выход датчика-энкондера, определяющего местоположение подвижной платформы по высоте,
при этом к первому выходу блока коммутации и накопления сигналов георадара подключена антенна передатчика первого блока антенн, ко второму выходу - антенна передатчика второго блока антенн, а третий выход - к шестому входу блока обработки информации и управления устройства, к седьмому входу которого подключен выход кнопки управления запуска устройства,
причем каркас устройства, подвижная сканирующая платформа, панель с антеннами передатчика и приемника, направляющие, по которым перемещается подвижная сканирующая платформа в пространстве, опоры для фиксации платформы в ее нижнем положении, тянущие ленты, редуктор электродвигателя, подшипник рабочего вала, непосредственно рабочий вал и все облицовочные панели устройства выполнены из диэлектрических материалов, а перегородка, отделяющая зону контроля устройства от пространства, в которой перемещается подвижная платформа, из радиопрозрачного материала.
Блоки передающих и приемных рупорных экранированных антенн радиолокатора размещены относительно друг друга с параллельно идущими осями диаграмм направленности и векторами излучения.
Устранение существующего недостатка (принципиальная возможность проноса через зону контроля монитора радиоактивных веществ с использованием специальных транспортных контейнеров или защитных экранов, поглощающих излучение) достигается за счет того, что в состав дополнительно вводится специальный радиолокатор, использующий георадарный метод выявления аномалий в контролируемой среде, основанный на явлении отличия отражений плоской электромагнитной волны от различных поверхностей, которые обладают определенными электрическими свойствами, а именно электропроводностью и диэлектрической проницаемостью.
Устройства, с помощью которых производят такие измерения, носят название георадаров. Для их работы (в зависимости от конкретно решаемых задач) используется интервал рабочих частот от 50 до 2000 МГц (центральная частота генерируемых сигналов).
Принцип действия георадара основан на излучении передающей антенной сверхширокополосных нанасекундных импульсов в направлении, подлежащем исследованию. При этом отраженный от среды сигнал, принимаемый приемной антенной, усиливается, преобразуется в цифровой вид и запоминается. После чего производится стробоскопическая обработка принятых сигналов с привязкой к местности, их фильтрация и последующее измерение временных интервалов между отраженными импульсами.
Применение метода георадиолокации для поиска маскируемых на теле (или в одежде) человека запрещенных для проноса предметов (в данном случае использующихся для экранирования радиоактивного излучения контейнеров и упаковок) оказалось возможным потому, что контролируемая среда (тело человека и размещенные на нем предметы) имеют хорошо различаемые значения величин удельного электрического сопротивления и диэлектрической проницаемости. При этом под удельным электрическим сопротивлением понимается величина затухания электромагнитного поля в исследуемой среде (чем меньше затухание, тем на большую глубину проникает поле).
Комплекты малогабаритных рупорных антенн (излучающая и приемная) георадара в количестве 2-х штук размещаются в предлагаемом устройстве совместно с детектором ионизирующего излучения на подвижной платформе, которая перемещается в пространстве (в процессе процедуры контроля: вверх, а затем вниз) по механическим направляющим специальным электроприводом. Необходимость применения не менее двух комплектов таких антенн вызвано тем, что для решения поставленной задачи следует обнаруживать предметы относительно небольших геометрических размеров (от нескольких сантиметров до 2-х десятков сантиметров и, соответственно, использовать практически максимальную частоту георадара - 2000 МГц), а также работать на очень небольшом от объекта контроля (человека) расстоянии, который, в свою очередь, может иметь достаточно большие геометрические размеры по ширине (в данном случае его габарит в районе плеч).
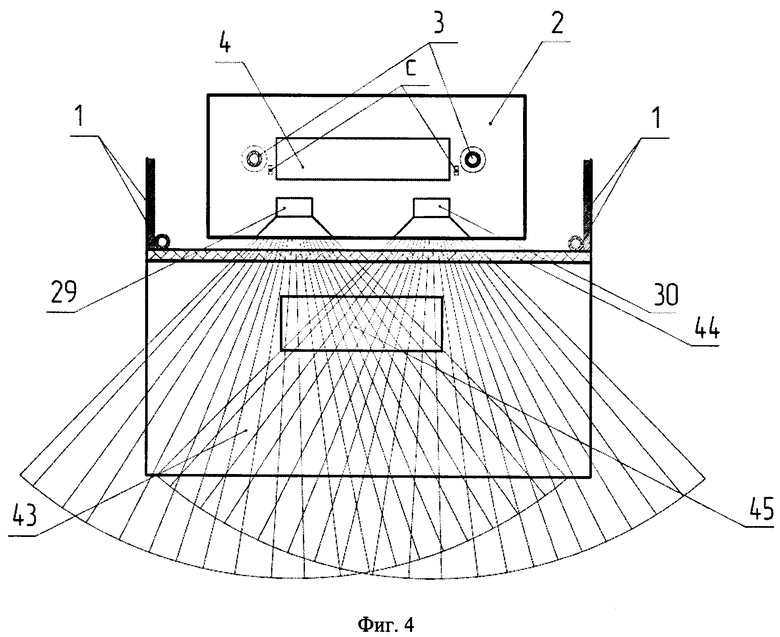
Для создания требуемых условий работы георадара с двумя комплектами антенн последние работают поочередно с использованием соответствующих сигналов синхронизации, позиционирования и управления движением подвижной платформы устройства, поступающих, соответственно, с датчика-энкондера, а также с датчиков фиксации нижнего и верхнего положений платформы в пространстве. При этом один блок антенн включается в работу при движении платформы вверх, а второй - при ее движении вниз. Формирование соответствующих сигналов управления антенными блоками осуществляется блоком коммутации и накопления сигналов георадара, выход которого подключен к цифровому входу блока обработки информации и управления устройства. При этом при работе любого из включенных в данный момент передатчиков (например, первого, он же левый из изображенных на фиг.4) в процессе перемещения подвижной платформы по высоте формируется высокочастотное электромагнитное поле (с относительно узкой диаграммой направленности в вертикальной плоскости), которым «зондируется» левая часть пространства зоны контроля устройства, ответные сигналы из которой (эхо-сигналы), принимаемые антенной приемника, работающего «в паре» с первым передатчиком, поступают на соответствующий вход блока коммутации и накопления сигналов георадара для их последующего усиления, предварительной обработки и накопления. После завершения фазы подъема платформы вверх происходит переключение режима ее движения вниз. При этом отключается первый блок антенн и включается в работу второй блок, который работает вплоть до момента остановки платформы в ее нижнем положении. При этом в процессе движения платформы к своей исходной позиции «зондируется» уже правая часть пространства зоны контроля. После полной остановки платформы завершается процесс предварительного преобразования полученных сигналов и накопленные данные в цифровом виде передаются в основной блок обработки информации и управления устройства, где (с использованием специального программного обеспечения) производится их окончательное декодирование с целью последующего отображения границ объектов в исследуемой среде. При этом на информационном табло устройства отображается соответствующая картинка, позволяющая идентифицировать ситуацию, а также индицируются сопутствующие данные, в том числе результаты радиационного контроля.
Предлагаемое изобретение поясняется чертежами:
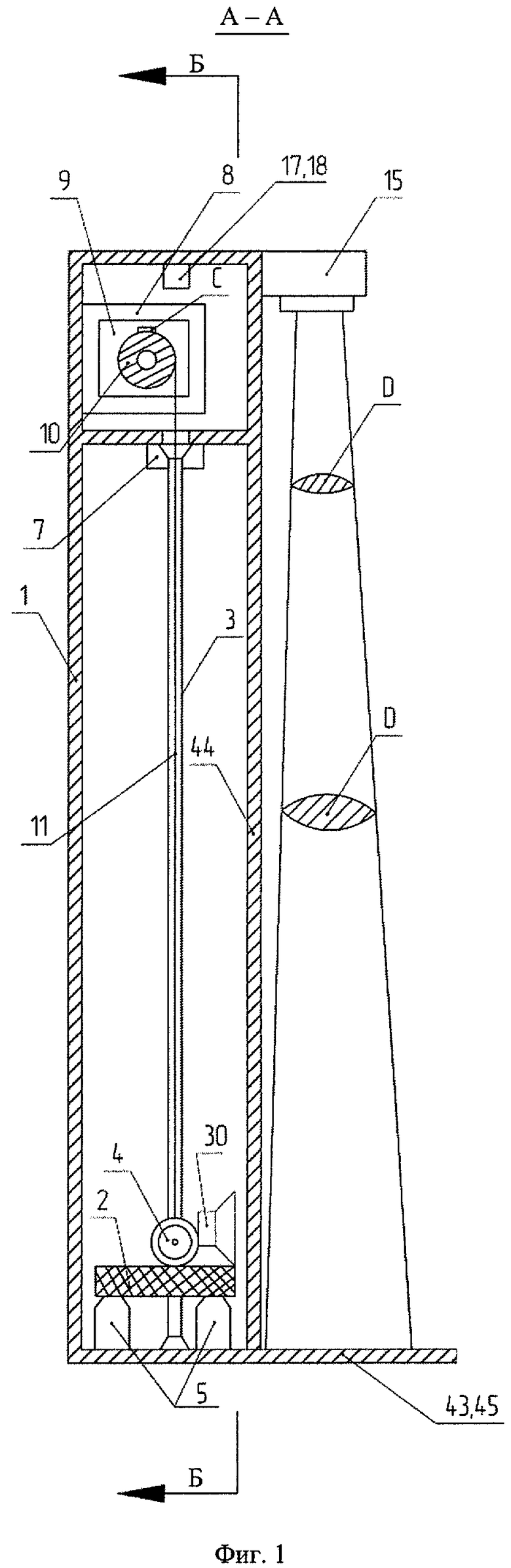
фиг.1 - конструктивная схема устройства, вид по разрезу А-А;
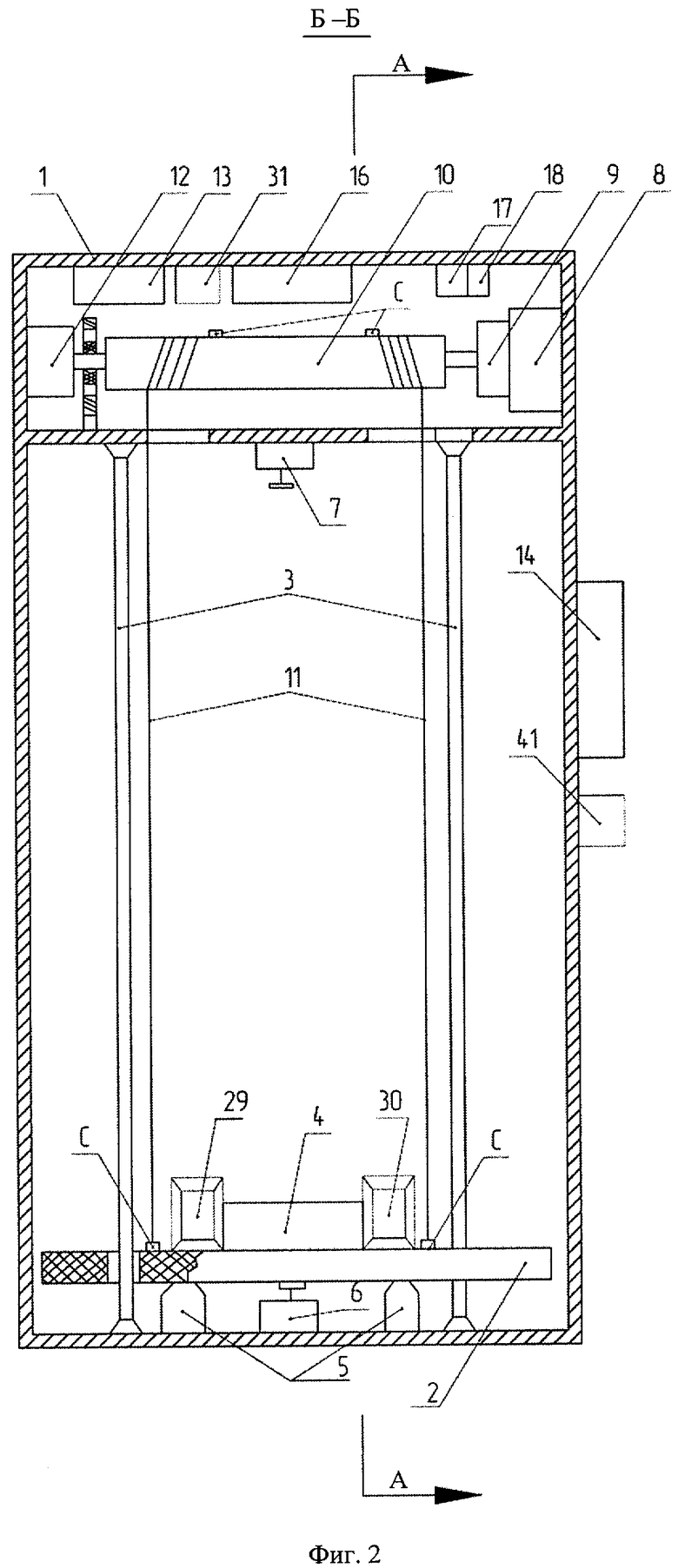
фиг.2 - конструктивная схема устройства, вид по разрезу Б-Б;
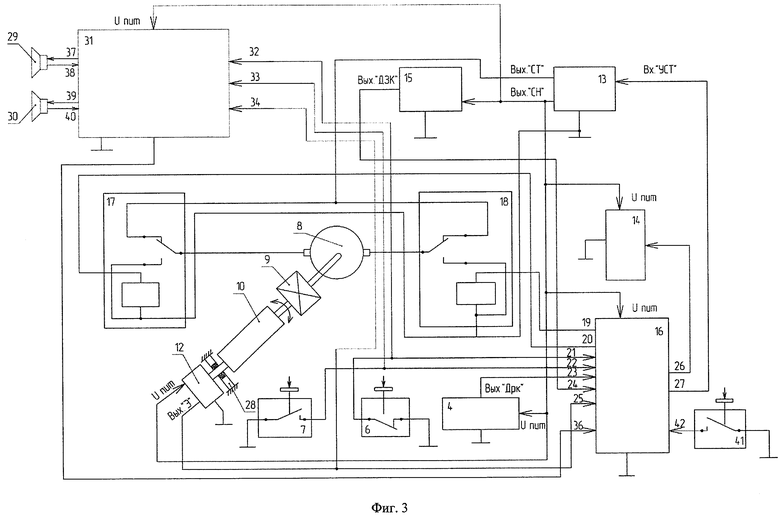
фиг.3 - структурно-функциональная схема устройства;
фиг.4 - основные позиции зоны контроля и узлов устройства, размещенных на подвижной платформе (вид сверху) - схематично изображены диаграммы направленности антенных блоков георадара в горизонтальной плоскости;
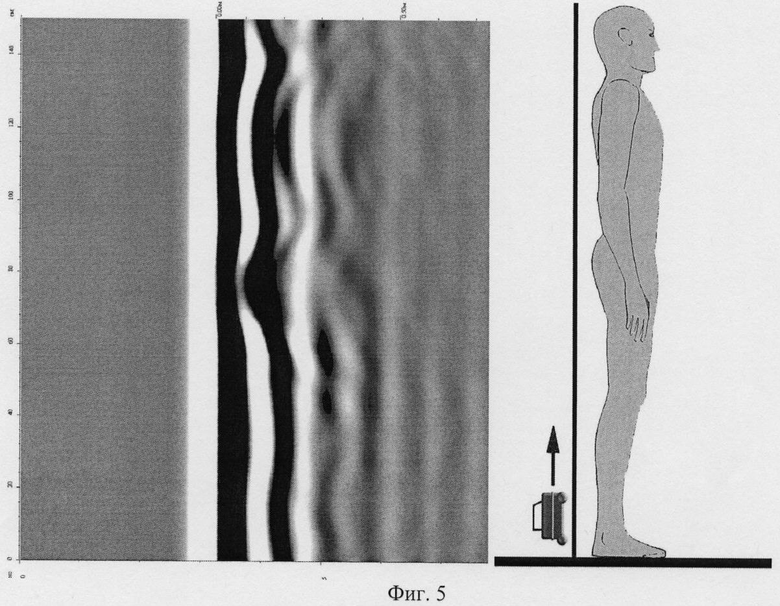
фиг.5 - принцип отображения георадарного профиля обследуемого человека;
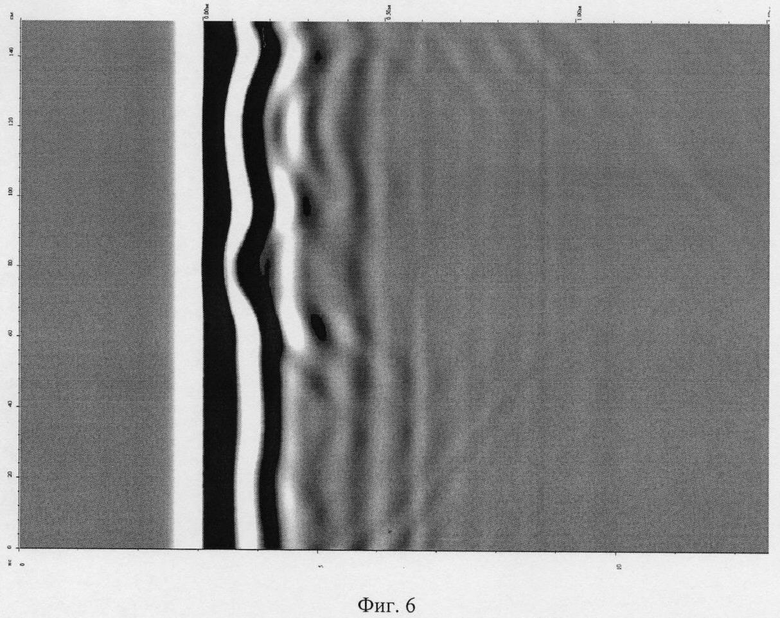
фиг.6 - георадарные профили конкретного человека без размещения на нем предметов поиска;
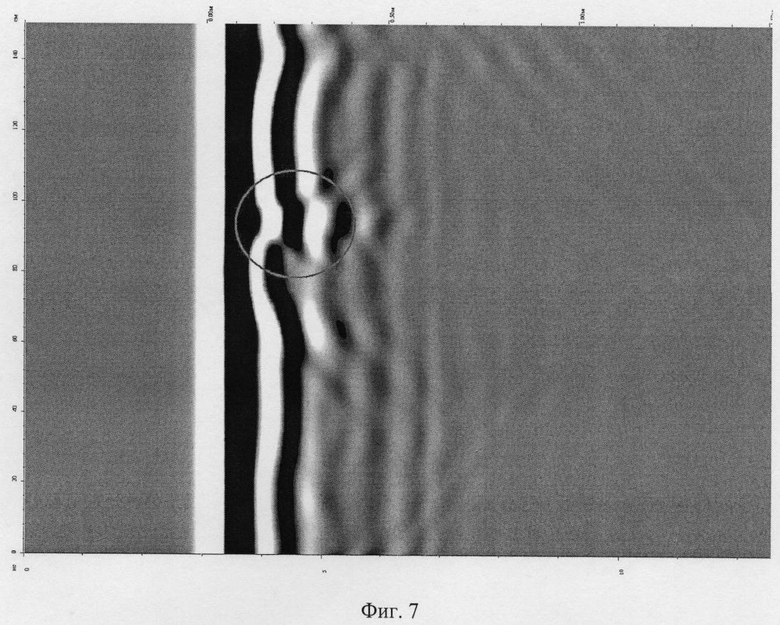
фиг.7 - георадарные профили конкретного человека с размещенным в районе его поясницы конкретным предметом.
Представленное устройство охранной сигнализации для обнаружения несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах (см. фиг.1 и фиг.2) содержит неметаллический несущий каркас 1, выполненный, например, из однотипных полипропиленовых труб, с размещенной в нем подвижной сканирующей диэлектрической платформой 2, перемещающейся по нетокопроводящим направляющим 3 из нижней части каркаса в верхнею и обратно. Детектор ионизирующих излучений 4 и блоки антенн георадара 29 и 30 (каждый из которых включает в себя, в свою очередь, антенну передатчика и антенну приемника), устанавливаются на подвижной сканирующей платформе 2. Каркас 1 со стороны зоны контроля перекрывается радиопрозрачным пластиком 44, остальные поверхности закрываются листами из любого также однотипного диэлектрического материала, например, поликарбоната. Опоры 5, выполненные из относительно мягкого диэлектрика (например, из резины), используются для фиксации платформы 2 в ее нижнем (исходном) положении. Датчик 6 обеспечивает выдачу информации о факте фиксации платформы 2 в ее нижнем (исходном) положении. Датчик 7 обеспечивает выдачу информации о достижении верхней (максимальной) точки подъема платформы 2. Для привода платформы 2 используется электродвигатель постоянного тока 8 с пластиковым редуктором 9 и рабочим валом 10, изготовленным из материала-изолятора, на который наматываются гибкие неметаллические тянущие ленты 11, закрепленные одними концами на рабочем валу 10, а другими концами на платформе 2 в точках «С». Опорный подшипник 28, изготовленный из токонепроводящего материала, например из фторопласта, фиксирует рабочий вал 10 электродвигателя 8 от осевых перемещений. Датчик-энкондер (преобразователь «угол-код») 12 с выходом ВЫХ. «Э» обеспечивает формирование синхронизирующих импульсов и дискретных сигналов, например, двоичного кода, пропорциональных высоте подъема подвижной сканирующей платформы 2. Питание электродвигателя 8 обеспечивает блок питания 13, имеющий управляемый стабилизатор тока (выход «СТ») - для питания двигателя 8 и стабилизатор напряжения (выход «СН») -для питания необходимыми напряжениями остального оборудования данного устройства.
Блок коммутации и накопления сигналов георадара 31 (см. фиг.3), используя на своих входах 32, 33, 34 сигналы от датчика 6 фиксации подвижной платформы 2 в ее нижнем положении, датчика 7 фиксации платформы 2 в верхнем положении и синхронизирующие сигналы датчика-энкондера 12, соответственно, управляет поочередно функционированием передатчиков антенных блоков 29 и 30 георадара, коммутируя на выходах 37, 39 необходимые сигналы. При этом он, принимая на входах 38, 40 сигналы от приемных антенн блоков антенн 29, 30, управляет процессом их коммутации, усиления, преобразования, накопления и формирования на своем выходе 35 необходимых цифровых данных, поступающих на вход 36 блока обработки информации и управления 16, предназначенных для окончательного анализа и формирования видимой картинки на информационном табло 14, снабженном звуковым извещателем.
Кроме этого информационное табло 14 устройства, подключенное своим входом к выходу 26 блока обработки информации и управления 16 устройства (см. фиг.3), обеспечивает также индикацию состояния и других средств, участвующих в процессе управления устройством и осуществления основной функции обнаружения - выявление фактов несакционированного проноса источников радиоактивного излучения.
Датчик 15 присутствия человека в зоне контроля «D» (см. фиг.1) производит выдачу сигнала нахождения/отсутствия человека в зоне контроля устройства (при проведении проверок), поступающего на вход 24 блока обработки информации и управления 16, который, в свою очередь, при наличии сигнала управления с кнопки 41 «Пуск» на входе 42, формирует на своих выходах 19 и 20 сигналы управления коммутационными элементами (реле) 17 и 18, подключающими источник тока блока питания 13 к двигателю 8 и переключающими полярность источника тока двигателя 8 для обеспечения движения платформы 2 соответственно в верхнее положение и обратно. Блок обработки информации и управления 16 устройства также имеет вход 21 для подключения датчика 6 фиксации исходного нижнего положения подвижной платформы 2, вход 22 - для подключения датчика 7 фиксации верхней точки подъема платформы 2, вход 23 - для подключения выхода «ВЫХ «ДРК» детектора ионизирующих излучений 4, формирующего импульсы счета значений радиационного фона, вход 25 - для подключения выхода «ВЫХ «Э » датчика-энкондера 12 и выход 27 для его подключения к входу «ВХ «УСТ» блока питания 13, предназначенного для обеспечения управления током двигателя 8 в разные фазы движения подвижной платформы 2.
Устройство работает следующим образом.
В исходном состоянии (см. фиг.3) после подачи на установку питающего сетевого напряжения на выходе стабилизатора напряжения «ВЫХ«СН» блока питания 13 появляется рабочее напряжение, которое поступает на цепи питания «Uпит.» детектора ионизирующих излучений 4, датчика-энкондера 12, информационного табло 14, датчика 15 присутствия человека в зоне контроля устройства, блока обработки информации и управления 16 и блока коммутации и накопления сигналов георадара 31. При этом на вход «ВХ «УСТ» блока питания 13 с выхода 27 блока обработки информации и управления 16 поступает управляющий сигнал логической единицы, по которому блок 16 переходит в режим готовности. На выходе блока 16 «ВЫХ «СТ» формируется некоторое начальное напряжение, определяемое характеристиками стабилизатора тока при его работе на холостом ходу. Это объясняется тем, что ток в нагрузке из-за нахождения контактов коммутационных элементов 17, 18 в исходном состоянии в этот момент полностью отсутствует (см. схему на фиг.3).
В это же время с детектора ионизирующих излучений 4 на вход 23 блока обработки информации и управления 16 устройства (см. фиг.3) начинают непрерывно поступать импульсы счета с частотой, пропорциональной уровню естественного радиационного фона, которая определяется характеристикой чувствительности примененного детектора 4. При условии, что человек в зоне чувствительности «D» датчика 15 отсутствует (см. фиг.2), с выбранным временем накопления Тф происходит подсчет количества импульсов и вычисление конкретного значения радиационного фона.
Если контроль прохода не осуществляется, то процесс измерения фона повторяется, и каждое последующее полученное значение сравнивается с предыдущим значением и допустимым порогом девиаций. В результате уточняется его абсолютная величина. Такой принцип позволяет улучшить статистику и уменьшить вероятность осуществления «обмана» монитора посредством незаметного приближения к зоне контроля нарушителем внешнего источника перед проходом, позволяющего «переобучить» устройство на более высокое значение фона и, таким образом, осуществить в последствии несанкционированный пронос радиоактивного вещества или материала. Указанные измерения и уточнения осуществляются постоянно при отсутствии проходов.
Если при вычислении значений естественного фона наблюдается устойчивая тенденция к его увеличению или скачкообразно превышен допустимый предел, то на выходе 26 блока обработки информации и управления 16 устройства формируется сигнал, поступающий на информационное табло 14, который отображается в виде сообщения «Превышен фон». При этом будет также включен и звуковой сигнал определенной тональности.
Если процесс первоначального измерения фона завершился успешно, то на информационном табло 14 устройства включается соответствующая индикация и можно осуществлять контроль проходящих лиц на предмет обнаружения несанкционированного проноса источников излучений. При появлении человека в зоне чувствительности «D» датчика 15 на его выходе «ВЫХ «ДЗК» появляется сигнал, который поступает на вход 24 блока обработки информации и управления 16, по которому выключается режим накопления радиационного фона и осуществляется перевод устройства в режим подготовки к измерениям (см. фиг.1, фиг.2 и фиг.3). После размещения контролируемого лица должным образом на площадке для ног 45 пола зоны контроля 43 (см. фиг.4) включается режим измерения посредством воздействия оператором на кнопку 41 «Пуск», сигнал с которой поступает на вход 42 блока обработки информации и управления 16 устройства (см. фиг.1, фиг.2 и фиг.3). При этом на выходе 20 блока 16 будет сформирован сигнал включения коммутационного элемента 17. До этого момента якорь двигателя 8 через перекидные и далее нормально замкнутые контакты коммутационных элементов 17 и 18 был замкнут накоротко и его вращение в ту или иную сторону было исключено.
В момент переключения перекидного контакта коммутационного элемента 17 и его замыкания с нормально разомкнутым контактом, подключенным к общей шине устройства (⊥), образуется цепь питания и стабилизации тока двигателя 8: выход стабилизатора тока «ВЫХ«СТ» источника питания 13 - нормально замкнутые контакты коммутационного элемента 18 - якорь двигателя 8 и общая шина. При этом ось двигателя 8 начинает вращаться, приводя в движения и выходной вал редуктора 9 (с передаточным коэффициентом, свойственным конкретному типу редуктора 9), рабочий вал 10 также приходит в движение, наматывая на себя тросы 11. Вращение вала 10 заставляет подвижную платформу 2, с закрепленными на ней детектором ионизирующего изучения 4 и блоками антенн 29 и 30 георадара, перемещаться по направляющим 3 вверх до момента срабатывания датчика 7 фиксации верхней точки подъема подвижной сканирующей платформы 2. При этом стабильность и плавность ее движения определяются величиной и стабильностью тока в цепи питания двигателя 8, формируемого управляемым стабилизатором тока блока питания 13, а скорость движения платформы 2 (в данном случае вверх) - конкретным значением тока на выходе «ВЫХ«СТ», задаваемого первоначальной (исходной) уставкой, определяемой параметрами электродвигателя, редуктора и диаметром рабочего вала 10, а также местом нахождения платформы 26 в пространстве, контролируемом датчиком-энкондером 12.
В момент начала движения подвижной сканирующей платформы 2 нормально замкнутый контакт датчика 6 фиксации исходного состояния платформы размыкается, на вход 21 блока обработки информации и управления 16 прекращает поступать сигнал, который ранее использовался для блокировки управления работой привода, создания условий для подготовки к измерениям естественного радиационного фона, а также блокировки формирования сигналов передатчиков антенных блоков 29 и 30 на выходах 37, 39 блока коммутации и накопления сигналов 31 георадара. В этот же момент с его выхода 37 начинают поступать импульсные сигналы для обеспечения работы передатчика антенного блока 29 георадара, начинает вращаться ось датчика-энкодера 12, механически соединенная с рабочим валом 10, и с выхода датчика «Вых. «Э» на вход 25 блока обработки информации и управления 16 устройства и на вход 34 блока коммутации и накопления и накопления сигналов 31 георадара (см. фиг.3) начинают поступать кодовые комбинации и сигналы синхронизации, соответственно, определяющие местонахождение подвижной сканирующей платформы 2 в пространстве (по высоте). При этом из-за работы передатчика антенного блока 29 в близлежащем пространстве (в соответствии с диаграммой направленности антенны) возникнет импульсное высокочастотное электромагнитное поле, которое начнет «зондировать» прилежащее к антенне пространство. В результате (в виде ответной реакции) будут возникать эхо-сигналы от предметов и поверхностей облучаемой среды, которые начнут фиксироваться антенной приемника блока антенн 29, преобразовываться в соответствующие электрические сигналы и поступать на вход 38 блока коммутации и накопления сигналов 31 георадара для их дальнейшего преобразования, фильтрации, оцифровывания и сохранения.
Примененный принцип накопления сигналов позволяет осуществлять первоначальную регистрацию обстановки в зоне контроля (формировать эталон значений «нулевого» отсчета) для учета реакции устройства на собственные элементы конструкции, а также размещенные в близлежащей зоне стационарно установленные предметы (например, металлические двери, решетки на окнах, досмотровое оборудование и т.п.). Это дает возможность (используя метод вычитания) корректировать (улучшать) реальные изображения, получаемые в процессе контроля проходящих лиц и, таким образом, повысить надежность работы устройства и его характеристики обнаружения.
В отличие от данного принципа процесс обнаружения источников ионизирующего излучения имеет другую природу, которая приведена в описании наиболее близкого аналога (в заявке на изобретение RU 2007143603). В предлагаемом устройстве он представляет собой следующие компоненты и процедуры.
Диапазон перемещения платформы 2 из нижнего положения в верхнее разбивается на N зон. Для каждой такой зоны, определенной конкретными величинами значений «угол-код» датчика-энкондера, записанными предварительно в память блока обработки информации и управления 16 устройства, в процессе движения подвижной платформы 2 производится подсчет импульсов, поступающих с детектора ионизирующих излучений 4, вычисляется разность Nc-Nф, и результат сравнивается с пороговым значением МПО. Все полученные данные записываются в оперативную память блока обработки информации и управления 16 для дальнейшего их использования по определенным правилам в процессе обратного хода платформы 2.
При подъеме подвижной платформы 2 предлагаемого устройства на максимальную высоту срабатывает датчик 7 фиксации факта достижения верхней точки ее подъема и на вход 22 блока обработки информации и управления 16 и на вход 34 блока коммутации и накопления сигналов 31 георадара поступает на короткое время логический уровень нуля («общая шина»). Это вызывает отключение формирования сигналов передатчика блока антенн 29 на выходе 37, включение передатчика блока антенн 30, формируемых на выходе 39 блока коммутации и накопления сигналов 31 георадара, отключение сигнала управления коммутационным элементом 17 на выходе 19 блока 16, включение сигнала управления коммутационным элементом 18 на выходе 20, а также формирование соответствующего сигнала на выходе 27 для управления стабилизатором тока блока питания 13 для осуществления движения платформы 2 вниз. В результате перекидной контакт коммутационного элемента 17 занимает исходное начальное положение, а перекидной контакт коммутационного элемента 18 переходит в позицию замыкания с ранее разомкнутым контактом. Такое состояние контактов коммутационных элементов 17 и 18 переключает направление протекающего через двигатель рабочего тока на обратное и платформа 2 начинает движение вниз. В этот же момент устанавливается другой режим работы стабилизатора тока блока питания 1 (режим формирования тока меньшего значения для осуществления движения платформы 2 вниз), т.к. вес платформы 2 будет помогать ее движению обратно к изначальной позиции. Величины токов (при начальном их задании) выбирают таким образом, чтобы время движения подвижной платформы 2 вверх было строго равно времени ее движения вниз. Одновременно с началом движения платформы 2 вниз начинается «зондирование» пространства зоны контроля в другой ее части и осуществляется аналогичный процесс формирования и накопления данных по «эхо-обстановке», но уже по второму каналу, сигналы на который поступают с приемной антенны блока антенн 30 на вход 40 блока коммутации и накопления сигналов 31 георадара.
В процессе перемещения платформы 2 к своему исходному положению также производится подсчет импульсов, поступающих с детектора ионизирующих излучений 4 для каждой из зон, и соответствующие значения записываются в оперативную память блока обработки информации и управления 16, где осуществляются вычисления и/или уточняются значения полученных приращений к естественному радиационному фону для принятия окончательного решения. Такой принцип позволяет существенно снизить вероятность ложного обнаружения источника радиации и/или повысить чувствительность устройства за счет использования фактически двойного времени накопления сигналов в каждой из зон (возможен подсчет общего количества импульсов в каждой зоне при движении платформы 2 сначала вверх, а затем вниз).
При достижении платформой 2 положения, при котором замыкается контакт датчика 6 фиксации нижнего положения платформы 2 в пространстве, на вход 21 блока обработки информации и управления 16 и вход 32 блока коммутации и накопления сигналов 31 георадара поступает сигнал логического нуля, завершается процесс «зондирования» зоны контроля георадаром и окончательного формирования на выходе 35 блока 31 пакета данных, поступающих на вход 36 блока обработки информации и управления 16. При этом на его выходе 19 отключается сигнал управления коммутационным элементом 18 и перекидной контакт последнего возвращается в исходное состояние. В этом положении контактов ток в цепи: «Вых«СТ» блока питания 13 - двигатель 8 прекращается и последний переходит в режим «короткозамкнутого якоря», что обеспечивает его эффективное торможение и плавное окончательное доопускание платформы 2 на опоры 5.
После завершения полного цикла перемещений подвижной платформы 2 «вверх-вниз» осуществляется процесс обработки и уточнения полученных данных в блоке 16 и на информационном табло 14 формируется некая видеокартинка контуров однородных сред, фиксируемых в зоне контроля, отображаются результаты измерений и расчетов о возможном месте нахождения (или об отсутствии) некоего предмета, которые используются при принятии окончательного решения. На фиг.5 приведена гипотетическая видеокартинка георадарного профиля человека, отображаемая на информационном табло по завершению процесса обработки информации. На фиг.6 и фиг.7 приведен пример отображения георадарного профиля одного и того же человека, одетого в верхнюю одежду: вариант на фиг.6 - без размещения предметов поиска на его теле и вариант на фиг.7 - с размещенным в районе поясницы толстостенным полиэтиленовым контейнером (сосудом) с водой емкостью 0,2 л. На фиг.7 в районе поясницы (высота примерно 90 см.) наблюдается хорошо выраженная аномалия в контуре спины (отмечена кружком), вызванная размещением на ней указанного выше предмета.
В процессе выполнения проверок, если оказалось, что источник ионизирующего излучения непосредственно обнаружен подсистемой радиационного контроля, то на выходе 26 блока обработки информации и управления 16 формируется сообщение о номере зоны, в которой выявлен источник излучения, и о его значимости (активности), которое поступает на вход информационного табло 14. В данной ситуации отобразится конкретная информация о таком событии на соответствующих индикаторах информационного табло 14 и при тревоге (при превышении допустимого предела) включится звуковой извещатель. Если источник излучения не обнаружен, то формируется сигнал разрешения и контролируемое лицо может выйти из зоны контроля устройства для своего дальнейшего следования.
В момент освобождения зоны контроля осуществляется переключение устройства в режим накопления и вычисления значения естественного фона. При этом возможны две ситуации. Если необходимо незамедлительно произвести следующий цикл измерения (в течение времени, меньшего чем время накопления фона Тф), то все расчеты устройством выполняются с использованием последнего измеренного значения фона. Если же следующий цикл измерения осуществляется с паузой, большей чем время накопления фона Тф, то при дальнейших расчетах используется уже обновленное значение естественного радиационного фона.
Используя одновременно сигналы от детектора ионизирующего излучения и видеокартинку, формируемую средствами геолокации, предлагаемое устройство позволяет исключить возможность несанкционированного проноса как самих источников ионизирующих излучений, так и источников, размещенных в специальных контейнерах, экранирующих радиоактивное излучение с обеспечением реализации функции целеуказания (определения мест размещения объектов контроля в пространстве по высоте).
Другим положительным качеством предлагаемого устройства является то, что при его работе могут дополнительно выявляться факты несанкционированного проноса холодного и огнестрельного оружия, взрывчатых, огнеопасных и ядовитых веществ, взрывных устройств, спиртосодержащую продукцию и т.п., запрещенных предметов, обладающих определенными габаритными размерами, что существенно повышает его функциональные возможности и надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПРОНОСА РАДИОАКТИВНЫХ ВЕЩЕСТВ НА КОНТРОЛЬНО-ПРОПУСКНЫХ ПУНКТАХ | 2008 |
|
RU2397547C2 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПРОНОСА РАДИОАКТИВНЫХ ВЕЩЕСТВ НА КОНТРОЛЬНО-ПРОПУСКНЫХ ПУНКТАХ | 2007 |
|
RU2358323C2 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ФАКТОВ НЕСАНКЦИОНИРОВАННОГО ПРОНОСА РАДИОАКТИВНЫХ ВЕЩЕСТВ НА КОНТРОЛЬНО-ПРОПУСКНЫХ ПУНКТАХ | 2010 |
|
RU2435224C1 |
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2444760C1 |
| Дистанционная система обнаружения несанкционированных врезок в магистральные трубопроводы | 2024 |
|
RU2839501C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ В БОРТОВЫХ ПРИБОРАХ, УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1992 |
|
RU2123197C1 |
| Устройство для радиационной интроскопии | 1988 |
|
SU1679311A1 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ И ПОРТАЛЬНЫЙ РАДИАЦИОННЫЙ МОНИТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384865C1 |
Предложено устройство охранной сигнализации для обнаружения несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах. Технический результат - повышение надежности и расширение функциональных возможностей обнаружителей несанкционированного проноса радиоактивных материалов и веществ с подвижной сканирующей платформой. Устройство содержит каркас, детектор ионизирующего излучения, блок обработки информации и управления, блок коммутации и накопления сигналов, а также блоки антенн радиолокатора, использующего метод георадиолокации, датчик присутствия человека в зоне контроля устройства, информационное табло со звуковым извещателем, подвижную сканирующую платформу, на которой совместно с детектором (детекторами) ионизирующих излучений установлены блоки антенн радиолокатора. Платформа перемещается по высоте в пространстве электроприводом по механическим направляющим. Датчик-энкондер и датчики фиксации платформы в верхнем и нижнем положениях определяют при работе устройства промежуточные и конечные положения платформы в пространстве. Каркас устройства, подвижная сканирующая платформа, панель с передающей и приемной антеннами, направляющие, опоры для фиксации платформы в ее нижнем положении, а также средства привода и облицовочное покрытие устройства выполнены из диэлектрических материалов, а перегородка, отделяющая зону контроля устройства от отсека с остальным оборудования, - из радиопрозрачного пластика. 1 з.п. ф-лы, 7 ил.
1. Устройство охранной сигнализации для обнаружения фактов несанкционированного проноса радиоактивных веществ на контрольно-пропускных пунктах, характеризующееся тем, что содержит каркас с N-детекторами ионизирующих излучений, где N - целое число большее или равное единице,
блок обработки информации и управления, датчик присутствия человека в зоне контроля устройства, информационное табло со звуковым извещателем,
подвижную сканирующую платформу, выполненную с возможностью ее перемещения в пространстве по высоте по механическим направляющим электроприводом, на которой размещается детектор ионизирующих излучений,
датчик-энкондер, определяющий положение подвижной сканирующей платформы в пространстве,
опоры для фиксации платформы в нижнем положении, датчик фиксации нижнего положения подвижной сканирующей платформы и датчик фиксации верхней точки подъема подвижной сканирующей платформы по меньшей мере два блока передающих и приемных рупорных экранированных антенн радиолокатора, работающего на принципах георадиолокации, размещенных в одной горизонтальной плоскости на расстоянии друг от друга на подвижной платформе совместно с по меньшей мере одним детектором ионизирующего излучения, кнопку управления запуском устройства в работу и
блок коммутации и накопления сигналов георадара, к первому входу которого подключена приемная антенна первого блока антенн, ко второму входу - приемная антенна второго блока антенн, к третьему входу - выход датчика фиксации нижнего положения подвижной платформы в пространстве, к четвертому входу - выход датчика фиксации ее в верхней позиции подъема, к пятому входу - выход датчика-энкондера, определяющего местоположение подвижной платформы по высоте,
при этом к первому выходу блока коммутации и накопления сигналов георадара подключена антенна передатчика первого блока антенн, ко второму выходу - антенна передатчика второго блока антенн, а третий выход - к шестому входу блока обработки информации и управления устройства, к седьмому входу которого подключен выход кнопки управления запуска устройства,
причем каркас устройства, подвижная сканирующая платформа, панель с антеннами передатчика и приемника, направляющие, по которым перемещается подвижная сканирующая платформа в пространстве, опоры для фиксации платформы в ее нижнем положении, тянущие ленты, редуктор электродвигателя, подшипник рабочего вала, непосредственно рабочий вал и все облицовочные панели устройства выполнены из диэлектрических материалов, а перегородка, отделяющая зону контроля устройства от пространства, в которой перемещается подвижная платформа, - из радиопрозрачного материала.
2. Устройство по п.1, характеризующееся тем, что блоки передающих и приемных рупорных экранированных антенн радиолокатора размещены относительно друг друга с параллельно идущими осями диаграмм направленности и векторами излучения.
| RU 2007143603 А, 10.08.2008 | |||
| СПОСОБ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ АВТОМОБИЛЬНЫХ ДОРОГ | 1999 |
|
RU2170297C2 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ "ГФК-1" | 2005 |
|
RU2283519C1 |
| US 3790799 А, 05.02.1974 | |||
| US 3780291 А, 18.12.1973 | |||
| US 6094472 А, 25.07.2000 | |||
| US 4228353 А, 14.10.1980. | |||

