Изобретение относится к области радиационного контроля (РК) и предназначено для обнаружения стационарными мониторами подвижных источников ионизирующих излучений (ИИИ), несанкционированно перемещаемых в контролируемом пространстве (зоне контроля) и их локализации (определения момента времени пересечения зоны контроля). Оно может быть использовано на контрольно-пропускных пунктах (КПП) атомных станций, предприятий ядерного цикла, таможнях, на проходных в местах скопления людей, при контроле багажа пассажиров, в конвейерах, на предприятиях втормета, для РК сельхозпродукции.
В основу работы известных мониторов положен способ обнаружения ИИИ путем сравнения аддитивной суммы сигнала от ИИИ и радиационного фона в зоне контроля с уровнем естественного радиационного фона в той же зоне и последующего принятия решения на основании полученной разности и выбранного критерия обнаружения о наличии-отсутствии ИИИ в зоне контроля.
Известен способ обнаружения ИИИ стационарными и мобильными комплексами РК (Патент РФ №2140660 «Способ обнаружения слабых потоков ионизирующих излучений», Бюл. №17 от 27.10.1999 г. ). Способ предназначен для решения задач обнаружения ИИИ при мониторинге заданных зон или на КПП, когда имеется визуальный контакт с объектом контроля и известно значение скорости счета фонового излучения в зоне контроля до появления там инспектируемого объекта. При этом устройства детектирования (УД) установлены входными окнами, чувствительными к радиационному излучению, в сторону контролируемого пространства параллельно траектории движения контролируемого объекта. Способ основан на критерии Неймана-Пирсона. По задаваемой оператором вероятности ложной тревоги α определяют из таблиц для нормального закона распределения порог q0, равный квантилю qα, и измеряют в зоне контроля среднюю скорость счета фонового излучения b за время tb до появления в ней инспектируемого объекта. Затем измеряют число импульсов N излучения от инспектируемого объекта по командам оператора «СТАРТ» в течение времени tn нахождения объекта в зоне контроля и после команды «СТОП» вычисляют среднюю скорость счета n аддитивной суммы сигнала и фона как отношение замеренного числа импульсов N ко времени измерения tn. На основании полученных данных вычисляют параметр η по формуле:
η=(N/tn-b)/(b/tb+n/tn)1/2.
Если параметр η больше порога q0, то принимают решение об обнаружении, в противном случае - о необнаружении.
Из выражения для параметра η видно, что результат решения задачи обнаружения зависит от точности определения скорости счета фона b, поэтому после покидания контролируемым объектом зоны контроля снова (при возможности) измеряют скорость счета фона b.
Если через зону контроля проходят несколько, например, два объекта с ИИИ, с некоторым временным интервалом, то при отсутствии регулирования пропуска контролируемых объектов через зону при помощи сигналов «СТАРТ-СТОП» высока вероятность пропуска ИИИ, т.к. детектирующая система будет реагировать на некий фантомный источник, образованный двумя разнесенными ИИИ. Возможна ситуация, когда сработает сигнализация о наличии ИИИ, когда первый объект с ИИИ уже прошел зону контроля, а второй - еще до нее не дошел. Необходимость введения сигналов «СТАРТ-СТОП» помогает решить задаче распознавания дублирующих проносов ИИИ, задачу измерения фона при гарантированном отсутствии объекта с ИИИ в зоне контроля, но усложняет организацию контроля и существенно увеличивает его продолжительность.
К недостаткам способа следует отнести зависимость результатов контроля от временных флуктуаций гамма-фона. Поэтому рекомендуется измерять фон непосредственно перед инспекцией и сразу после того, как контролируемый объект покинет зону контроля, чтобы оценить флуктуацию фона и провести соответствующую корректировку результатов инспекции. А это требует дополнительного времени, т.е. снижает производительность контроля. Поэтому во избежание ложных срабатываний увеличивают порог обнаружения q0, чем компенсируют влияния флуктуаций фона, но в результате чего загрубляют чувствительность. А это грозит возможным пропуском ИИИ.
Известен «Способ обнаружения ядерных материалов и радиоактивных веществ» (Патент РФ №2 364 890 С1, Бюл. №23 от 20.08.2009 г. ). Способ включает использование пешеходного радиационного монитора гамма-излучения, состоящего из УД ядерных материалов и радиоактивных веществ, металлодетектора для обнаружения металлических предметов, превышающих установленную допустимую массу металла П0, датчика для фиксации присутствия инспектируемого объекта (например, человека) в контролируемом пространстве, электронного блока обработки и пульта управления и индикации. УД установлены таким образом, что их входные окна параллельны траектории движения объектов контроля.
Перед началом контроля объектов с пульта управления и индикации вводят начальный (рекомендованный) порог обнаружения П0 и измеряют начальные значения скорости счета от фонового излучения nOK каждого УДК (к - число УД). Адаптацию к изменяющемуся гамма-фону осуществляют перед каждым сеансом инспекции вычисляя методом скользящего среднего значения скорости счета фоновых импульсов nФK каждым УДК.
При входе контролируемого лица под арку монитора вычисление nФK прерывают сигналом датчика присутствия и измеряют сигналы NЭК, поступающие от каждого УДК за время tЭ нахождения контролируемого лица в зоне контроля. Электронный блок вычисляет время tЭ, а также вычисляет для каждого УДК пороговое значение NПK обнаружения ядерного материала (при вероятности обнаружения Р, равной 0,95, и вероятности ложной тревоги РЛТ, равной 0,0001,) по формуле:

и осуществляет проверку выполнения следующих условий обнаружения:
NЭК > NПК.
Если хотя бы одно из этих условий выполняется, то срабатывает сигнализация «ТРЕВОГА: ЯДЕРНЫЙ МАТЕРИАЛ». Если же ни одно из вышеприведенных условий не выполняется, то сигнал отсутствует. В последнем случае решение об обнаружении ядерного материала принимают по результатам обнаружения металлических предметов у контролируемого объекта. Одновременно с указанной процедурой объект, находящийся в зоне контроля, подвергается проверке на наличие металлических предметов путем регистрации амплитуды сигнала UM, создаваемыми металлическими предметами в металл о детекторе. Электронный блок вычисляет текущие значения параметра ПК для каждого УДК по формуле:
ПК=П0⋅(nОК/nФК)1/2.
Минимальное значение ПК принимают в качестве текущего порога обнаружения ПT металлодетектора. Если амплитуды сигнала UМ будет больше порога ПT, то сработает сигнализация «ТРЕВОГА: МЕТАЛЛ».
Таким образов, в рассматриваемом способе обнаружения ядерных материалов и радиоактивных веществ отсутствие нейтронного канала обнаружения компенсируется введением дополнительного канала обнаружения экранирующих гамма-излучение металлов.
К недостаткам такого метода следует отнести сложность организации радиационного контроля: необходимо кроме радиационной аппаратуры устанавливать рамку металлодетектора и устанавливать датчики присутствия.
Известна система радиационного контроля "ИНТЕР-1М" (сайт http://opyt.com.ua/inter.php) радиационно-опасных и ядерных материалов, применяемая на железнодорожных и автомобильных КПП, в которых УД, как и в предыдущих случаях, установлены входными окнами в сторону контролируемого пространства параллельно траектории перемещения контролируемых объектов. В модификации системы "ИНТЕР-1М" 2014 года выпуска чувствительность повышена за счет применения датчиков расстояния до контролируемого объекта. Находясь в зоне контроля, транспортное средство и груз экранируют естественный радиационный фон. Чем ближе груз к УД, тем заметнее эффект снижения показаний. Датчик измеряет расстояние до груза и система автоматически снижает порог срабатывания, увеличивая вероятность обнаружения ИИИ.
Известны также пешеходные мониторы «Дозор» (Мониторы радиационные пешеходные КСАР1У.031 «Дозор», Руководство по эксплуатации РНПИ.540100.000 РЭ, НТЦ «Ядерно-физические исследования», г. Санкт-Петербург, 2016 г. ), осуществляющие контроль радиационного уровня объектов инспекции, перемещающихся через зону контроля. Для определения наличия объекта в зоне контроля используют датчики системы контроля присутствия. Мониторы «Дозор» имеют в своем составе УД гамма- и(или) нейтронного излучения, входные окна которых устанавливаются параллельно траектории движения контролируемых объектов.
Значение порога обнаружения L вычисляют по формуле (приняты обозначения оригинала):

где: Ви=Ти⋅В/Тф - фон за время измерения,
m - заданное число стандартных отклонений σ=В1/2, определяющее порог обнаружения монитора и вероятность ложных обнаружений,
р - коэффициент для учета асимметрии Пуассоновского распределения входных импульсов,
Ти - время измерения,
Тф - время набора фона,
В - значение фоновой счетности за время Тф.
При срабатывании датчика присутствия программа производит сравнение интеграла счетностей Nu за интервал измерений с пороговым значением L. Решение о наличии, либо отсутствии ИИИ в контролируемом объекте принимают в каждом интервале измерений исходя из значения коэффициента К, вычисляемого по формуле:
К=(Nи-Bи)/L.
Если величина К меньше или равна единице, считают, что в контролируемом пространстве ИИИ отсутствует, при К больше единицы вырабатывается сигнал «ОБНАРУЖЕНИЕ ИИИ».
К недостаткам этих мониторов следует отнести зависимость результатов контроля от точности измерения радиационного фона и от его временных флуктуаций (особенно - гамма-фона). Для адаптации к изменяемому во времени радиационному фону необходимо периодически его измерять при гарантированном отсутствии в зоне контроля проверяемых объектов с ИИИ для последующей корректировки параметров алгоритма обнаружения. Обычно во избежание ложных срабатываний от флуктуаций фона во время контроля порог обнаружения загрубляют.
При измерении слабых потоков гамма- или нейтронного излучения соотношение «сигнал - фон» значительно меньше единицы, и чем больше величина фона, тем сложнее обнаружить сигнал. Поэтому вводят ограничения на условия работы мониторов по максимальному допустимому уровню радиационного фона. В ГОСТ Р 51635-2000 «Мониторы радиационные ядерных материалов» категории мониторов по порогу обнаружения устанавливаются только для уровня радиационного фона не выше 0,25 мкЗв/ч (25 мкР/ч).
При контроле подвижных объектов с ИИИ, кроме того, большую роль играет форма сигнала детектирующего устройства, которая определяет требуемое время контроля - время набора достаточной статистики измеряемой УД смеси «сигнал и радиационный фон». Для этого используют датчики присутствия объекта в зоне контроля, либо оператор вручную, используя сигналы «Старт» и «Стоп», задает время набора статистики. Это приводит к дискретности контроля, что существенно снижает производительность инспекции. Из-за того, что входные окна существующих мониторов параллельны траектории перемещения контролируемых объектов в зоне контроля, в них (мониторах) отсутствует функция раннего обнаружения - не обеспечивается возможность определения направления, с которого приближается ИИИ.
Наиболее близким к предлагаемому изобретению является «Способ поиска, обнаружения и локализации ИИИ» (патент РФ №2 562 142 С1, Бюл. №25 от 10.09.2015 г. ), в котором локализация обнаруженного ИИИ заключается в определении точки пересечения определенных детектирующей аппаратурой линий-направлений на искомый ИИИ из двух различных точек. Это достигается при помощи одного мобильного монитора, определяющего эти два направления последовательно из двух различных мест, или при помощи двух стационарных, разнесенных на некоторое расстояние мониторов, также определяющих эти два направления, но одновременно. Очевидно, что если известна траектория движения инспектируемых объектов или лиц, то для локализации обнаруженного ИИИ достаточно одного стационарного монитора. Тогда местоположение ИИИ будет локализовано как точка пересечения траектории его движения и линии-направления, определенной детектирующей аппаратурой.
По способу-прототипу решение поставленной задачи достигается при помощи четного количества, например, двух одинаковых пластиковых сцинтилляционных УД (фиг. 1, вид сверху): правого УДR 1 и левого УДL 2, имеющих экраны-поглотители 3 излучения. УД установлены на платформе 4 таким образом, что их входные окна 5 и 6 направлены в противоположные стороны, образуя острый двугранный угол 2ψ 7 с биссекторной плоскостью 8, проходящей через нулевую риску 9 платформы 4 и ее ось вращения, перпендикулярную плоскости чертежа. Отсчет угла поворота платформы 4 производят по шкале платформы относительно индекса 10, обозначающего диаметральную плоскость 11 (осевую линию) монитора, проходящую через ось вращения платформы 4, индекс 10 и пересекающую траекторию движения инспектируемых объектов 12 в зоне контроля 13. Каждый из УД (правый УДR и левый УДL) вырабатывает среднюю скорость счета импульсов аддитивной суммы сигнала от ИИИ и радиационного фона -соответственно nR(t) 14 и nL(t) 15. Эти сигналы поступают на сравнивающее устройство 16, где формируется разностный сигнал Δn(t) 17, равный:
Δn(t)=nR(t)-nL(t),
который подают на двигатель 18, кинематически связанный с платформой 4.
Обнаружение и локализация ИИИ по способу-прототипу в режиме монитора происходит следующим образом. После включения аппаратуры и ее прогрева монитор готов к работе. Предварительного измерения радиационного фона не требуется. При появлении объекта с ИИИ 19 в зоне чувствительности УД, появится сигнал Δn(t) 17, в котором отсутствует составляющая b(t), соответствующая средней скорости счета естественного радиационного фона, и знак которого определяет сторону, с которой приближается источник, сработает сигнализация «ОБНАРУЖЕНИЕ», двигатель 18 начнет разворачивать платформу 4 с УД в сторону обнаруженного ИИИ 19 и отслеживать его перемещение. В идеальном случае местоположение обнаруженного подвижного ИИИ 19 в каждый момент времени будет определять точка пересечения контрольной полуплоскости 20 - продолжении биссекторной плоскости 8 - и траектории движения 12 ИИИ 19, а также курсовой угол Ку 21 по шкале платформы 4. При достижении обнаруженным ИИИ 19 зоны контроля 13 нулевая риска 9 платформы совпадет с индексом 10, а контрольная полуплоскость 20 - с диаметральной плоскостью 11 монитора. Детектирующая система выработает сигнал «ЛОКАЛИЗАЦИЯ», означающий, что обнаруженный источник 19 в данный момент времени находится в створе портальных ворот (в зоне контроля) 13.
В реальных условиях эксплуатации при появлении ИИИ 19 в зоне чувствительности УД математическое ожидание (МО) сигнала Δn(t) в начальный момент будет мало отличаться от нуля, и значительная часть средних значений импульсов будет оставаться внутри некоторой зоны - зоны нечувствительности. Однако появление импульсов, превышающих эту зону, возможно, и двигатель может начать вращение платформы 4 в сторону появившегося источника 19, но момент наступления такого события случаен, и для повышения вероятности его наступления необходимо некоторое время для набора статистики. Двигатель 18 начнет разворачивать платформу с УД в сторону приближающегося ИИИ, увеличивая курсовой угол Ку 21, стараясь совместить контрольную полуплоскость 20 с направлением 22 на источник 19. ИИИ 19, в свою очередь, движется в сторону зоны контроля 13 с некоторой скоростью ν. При этом и без того малый разностный сигнал Δn(t) будет уменьшаться. А это приведет к остановке платформы с УД, но не в момент совпадения контрольной полуплоскости 20 с направлением на источник 22, а позже из-за движения со скоростью ν ИИИ и вследствие запаздывания в выработке управляющего сигнала Δn(t). Смена направления вращения платформы 4 произойдет с запаздыванием. При этом ИИИ продолжит движение с линейной скоростью ν, которое воспринимается платформой как вращательное движение с угловой скоростью ω, равной ν/r, где r - расстояние от оси вращения платформы 4 до источника 19. Причем в связи с уменьшением расстояния r по мере приближения источника к зоне контроля угловая скорость ω будет увеличиваться, что приведет к дальнейшему отставанию платформы 4 в слежении за объектом с ИИИ. В результате детекторная система выработает сигнал «ЛОКАЛИЗАЦИЯ», как и положено, в момент времени совпадения риски 9 платформы 4 с индексом 10, но который произойдет с запаздыванием, зависящим от активности и скорости движения ИИИ, расстояния r и чувствительности детектирующей аппаратуры. В принципе, указанное запаздывание можно уменьшить, повысив чувствительность УД, но это приведет к удорожанию аппаратуры и увеличению ее массо-габаритных характеристик, либо ограничить допустимую скорость перемещения контролируемых объектов, что нежелательно из-за снижения производительности контроля.
Если через зону контроля проходят несколько, например, два объекта с ИИИ, с некоторым временным интервалом, то высока вероятность пропуска ИИИ, т.к. детектирующая система будет реагировать на некий фантомный источник, образованный двумя разнесенными синхронно движущимися ИИИ. Возможна ситуация, когда сработает сигнализация о наличии ИИИ, когда первый ИИИ уже прошел зону контроля, а второй - еще до нее не дошел.
К недостаткам прототипа следует также отнести наличие подвижных частей, что удорожает аппаратуру и снижает ее надежность.
Целью настоящего изобретения является создания способа, лишенного недостатков аналогов и прототипа, оперативно обеспечивающего с высокой вероятностью непрерывное заблаговременное обнаружение приближающихся к зоне контроля объектов с ИИИ в условиях нестабильного радиационного фона, не требующего предварительного замера радиационного фона, наличия датчиков присутствия объекта инспекции в зоне контроля и обеспечивающего с высокой точностью раздельное определение моментов времени пересечения обнаруженными ИИИ зоны контроля (локализацию).
Реализация предлагаемого способа обнаружения и локализации подвижных ИИИ в зоне контроля, заключается (фиг. 2) в использовании четного количества одинаковых широкоугольных сцинтилляционных или газонаполненных устройств детектирования (УД): группы правых УДR 1 и группы левых УДL 2 (на фиг. 2 каждая группа показана как один УД), разделенных экранами-поглотителями излучения 3 и установленных на неподвижной платформе 4 таким образом, что их входные окна 5 и 6 направлены попарно в противоположные стороны и образуют острый двугранный угол 2ψ 7 с биссекторной плоскостью 8. Аппаратура установлена таким образом, что продолжение биссекторной плоскости 8 -контрольная полуплоскость 20 - при пересечении с траекторией движения объектов контроля 12 образует центр зоны контроля 13. Мгновенные значения выходных сигналов от группы УДR  14 и от группы УДL
14 и от группы УДL  15 поступают на вычислитель 23, где формируется разностный сигнал Δn(t):
15 поступают на вычислитель 23, где формируется разностный сигнал Δn(t):
 ,
,
где: nR(t) и nL(t) - средние значения соответственно сигналов  и
и  , вычисленные, например, методом скользящего интервала за некоторое время te. Сигнал Δn(t) является основным информационным сигналом, положенным в основу предлагаемого способа. В дальнейшем для упрощения записи знак суммы опущен.
, вычисленные, например, методом скользящего интервала за некоторое время te. Сигнал Δn(t) является основным информационным сигналом, положенным в основу предлагаемого способа. В дальнейшем для упрощения записи знак суммы опущен.
На основании анализа изменения полученной аналитически формы сигнала Δn(t) в зависимости от времени t при движении объекта контроля с ИИИ относительно детектирующей аппаратуры по траектории движения 12, при пересечении центра зоны контроля 13 и удаления от него формируют оптимальный алгоритм обнаружения и локализации ИИИ.
Выражения для средних скоростей счета УДR и УДL, определяющих форму выходных сигналов как функции от времени, можно записать в следующем общем виде: 

где: b(t) - среднее значение скорости счета радиационного фона,
nCR(t) и nCL(t) - фактически измеряемые УДR и УДL средние значения скорости счета от ИИИ за вычетом средней скорости счета фона.
На фиг. 3 показана схематично упрощенная модель детектирующей аппаратуры при параллельных входных окнах УДR и УДL (для случая, когда угол ψ равен нулю). Толстыми линиями обозначены входные окна AR 5 и AL 6, каждое площадью S, принадлежащие соответственно УДR 1 и УДL 2. Экраны-поглотители 3, разделяющие УД, на фиг. 3 не показаны. Продолжение входных окон - отрезок АО (равный r0) - пересекает под прямым углом линию-траекторию перемещения контролируемых объектов 12, совпадающую с осью х, в точке О, являющейся центром зоны контроля 13.
В начальный момент времени при t, равном нулю, контролируемый объект с ИИИ находится в точке Q с координатой х(0), равной - х0. Далее объект с ИИИ движется с постоянной скоростью ν по траектории 12, и в каждый момент времени его координата (точка М) определяется радиус-вектором r(х) 24, составляющим с отрезком АО отрицательный угол α 25.
Из треугольника АОМ следует:

или, учитывая, что
x(t)=-x0+νt,
получаем следующее выражение для радиус-вектора rx(t) как функции времени:

Учитывая линейную зависимость между координатой x(t) и временем t, ось х можно считать в некотором масштабе, зависящем от скорости движения контролируемого объекта, осью t.
Удельная скорость счета сигнала УД ns(t) на единицу площади его входного окна S, пропорциональная величине KS, зависящей от активности ИИИ и чувствительности УД, и обратно пропорциональная квадрату расстояния rx(t), определяется (без учета фоновых импульсов) выражением:

Сигнал, вырабатываемый УД, определяют как произведение удельной скорости счета ns(t) на апертуру - проекцию поверхности входного окна УД, перпендикулярную направлению на источник.
Из треугольника ABL видно, что в данном частном случае апертура АВ 26 перпендикулярна радиус-вектору AM, направленному на ИИИ, равна величине S⋅sina и совпадает как для УДR, так и для УДL. Отличие в реакции УДR и УДL на облучение источником заключается в том, что входное окно 6 УДL 2 «освещается» источником непосредственно, а УДR 1 «освещается» через экраны-поглотители излучения 3, а не через входное окно 5. В результате УДL будет вырабатывать сигнал nCL(t), пропорциональный апертуре АВ 26, а УДR - тоже пропорциональный апертуре АВ 26 и коэффициенту ξ1, обратному по величине кратности ослабления свинцовыми экранами УДR и УДL уровня излучения. Кратность ослабления уровня излучения, зависящая от толщины экрана и типа облучающего радионуклида, определяется из таблиц (Козлов В.Ф., Справочник по радиационной безопасности, 4-е издание, М., Энергоатомиздат, 1990 г. стр. 246-247).
С учетом сказанного выражения для сигналов nCR(t) и nCL(t) примут вид: 
Тогда выражения (1) для выходных сигналов nR(t) 14 и nL(t) 15 можно записать в следующем виде:

При положительных значениях координаты x(t) точки N (объекта с ИИИ) ее радиус-вектор rx(t) 27 составляет с отрезком АО положительный угол α 28.
Из треугольника AON следует:

Из треугольника ACR получаем для апертуры АС 29 (перпендикулярной направлению AN 27 на ИИИ) следующее выражение:
АС=AL⋅sin α=AR⋅sin α=S⋅sin α,
совпадающее по виду с апертурой АВ, но отличающееся по знаку sin α.
В данном случае «освещается» источником непосредственно входное окно УДR и формируется штатный сигнал nCR(t), а входное окно УДL при этом находится в «тени». Сигнал nCR(t) будет в этом случае уменьшен экранами-поглотителями излучения пропорционально величине ξ.
С учетом сказанного выражения для сигналов nCR(t) и nCL(t) будут иметь следующий вид:

Тогда выражения (1) для выходных сигналов nR 14 и nL 15 при положительных x(t) можно записать в следующем виде:
Следующим шагом в реализации способа является вычисление разностей Δn(t), полученных раздельно для отрицательных (из (2)) и для положительных (из (3)) значений x(t). Выполнив соответствующие вычисления, получаем, что выражения для разностного сигнала Δn(t) как при отрицательных х, так и при положительных совпадают и имеют вид:

Из (4) видно, что при применении рассматриваемой детектирующей аппаратуры для обнаружения и локализации подвижных ИИИ, используя в качестве информативного разностный сигнал Δn(t), происходит компенсация средней скорости счета фона b(t) вместе с его флуктуациями. А это означает, что для рассматриваемой детектирующей аппаратуры порог обнаружения ИИИ будет существенно меньше соответствующего порога для аналогов данного предполагаемого изобретения, т.к. будет зависеть только от случайной составляющей радиационного фона, вызываемой радиационным распадом, и не зависеть от уровня самого фона. Что дает предпосылки для повышения вероятности обнаружения, в том числе, и слабых ИИИ.
Величина сигнала Δn(t) может принимать как положительные, так и отрицательные значения в зависимости от соотношения величин сигналов nR(t) и nL(t), т.е. от того, с какой стороны (правой или левой) будет приближаться объект с обнаруживаемым ИИИ.
График сигнала Δn(t) в функции времени t, соответствующий (4), представлен на фиг. 4 для случая движения объекта с ИИИ со стороны УДL (это следует из того, что сначала идет отрицательная полуволна сигнала Δn(t) 30, соответствующая левому УД, а затем - положительная). Видно, что форма сигнала Δn(t) симметрична с учетом знака для положительных и отрицательных значений Δn(t), модули амплитуд первой и второй полуволн равны.
Учитывая, что движение объекта с ИИИ равномерное со скоростью ν и определяется выражением
x(t)=-x0+νt,
ось времени на фиг. 4 является в некотором масштабе осью х.
Из выражения (4) следует, что смена знака сигнала Δn(t) будет происходить в момент времени t, равный

тогда, подставляя это значение в выражение для x(t), получаем

т.е. смена знака сигнала происходит когда объект с ИИИ находится в центре зоны контроля 13 (на фиг. 3-в точке О). Это момент времени локализации обнаруженного источника, который и требуется определить.
При учете угла ψ между УД картина усложняется. На фиг. 5 толстыми линиями показаны входные окна AR 5 и AL 6, каждое площадью S, принадлежащие соответственно УДR 1 и УДL 2. Они образуют между собой острый двугранный угол 2ψ 7 с биссекторной плоскостью 8. Продолжение биссекторной плоскости - контрольная полуплоскость 20 -при пересечении с траекторией движения объектов контроля 12 (осями x или t) образует центр зоны контроля 13. Экраны-поглотители 3, разделяющие УД, на фиг. 5 не показаны. Плоскости-продолжения входных окон 5 и 6 при пересечения с траекторией движения контролируемых объектов 12 (осью х) образуют соответственно точки R' и L', которые определяют границы зоны контроля с центром в точке О 13.
Из треугольника AOR', учитывая, что отрезок АО равен r0, и что отрезок R'O равен отрезку О L', получаем выражение для длины зоны контроля
R' L'=2r0⋅tgψ,
или относительно центра зоны контроля: ± r0⋅tgψ.
Выражение для сигнала Δn(t) с учетом угла 2ψ между входными окнами УД более сложное чем (4), оно представляет собой кусочно-непрерывную функцию, состоящую из трех составляющих:

где индексы у Δn означают номера участков (временных интервалов) формирования составляющих сигнала Δn(t), границы которых определяются зоной контроля ± r0⋅tgψ относительно центра 13. Вывод выражений для формы сигнала для каждого участка аналогичен приведенному выше, и из-за громоздкости не приводится. В развернутом виде и в принятых в настоящем описании обозначениях составляющие сигнала Δn(t) для каждого участка (временного интервала) имеют вид:
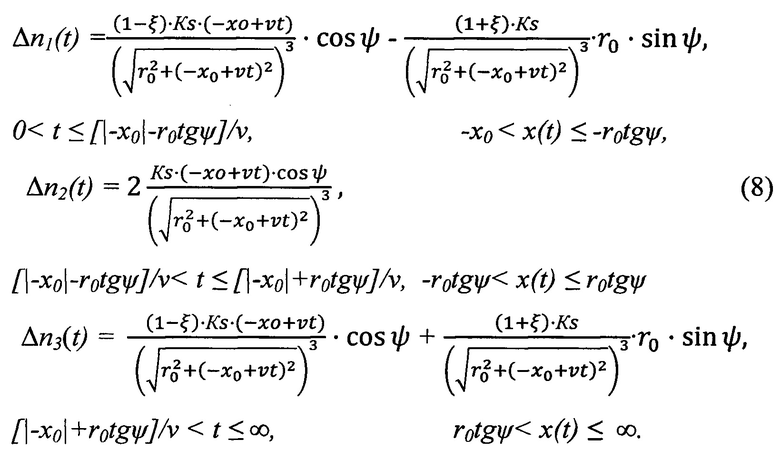
Полученное ранее выражение (4) является частным случаем равенства (7) с учетом (8) при ψ=0.
Из выражений (8) видно, что теоретически (без учета зоны нечувствительности) смена знака сигнала Δn(t) происходит на участке 2 в центре зоны контроля, ограниченной неравенствами:

в момент времени, равный

На фиг. 6 представлены графики выходного сигнала Δn(t) (7) с учетом (8) при движении объекта с точечным ИИИ со стороны УДL для разных значений угла ψ: кривая 30 - для угла 0°, 31 - для угла 5°, 32 - для угла 10°, 33 - для угла 20°, 34 - для угла 30°, 35 - для угла 35°. Из графиков видно, что введение угла ψ повышает при прочих равных условиях уровень сигнала (повышает чувствительность) почти в два раза по отношению к сигналу при ψ, равном нулю, но до определенного значения - угла ψ, равного 30°, далее уровень сигнала начинает уменьшаться.
Характерной особенностью сигнала Δn(t) является превышение в несколько раз максимума модуля его производной по времени  на участке между пиками по сравнению с максимумами модуля его производной по времени на участках до первого пика
на участке между пиками по сравнению с максимумами модуля его производной по времени на участках до первого пика  и после второго (обратного) пика
и после второго (обратного) пика  . При угле ψ, равном нулю, это отношение равно 4,9; при угле 5° - 7,9; при угле 8° - 8,0; при угле 10° - 7,4; при угле 20° - 5,3 и далее - уменьшается.
. При угле ψ, равном нулю, это отношение равно 4,9; при угле 5° - 7,9; при угле 8° - 8,0; при угле 10° - 7,4; при угле 20° - 5,3 и далее - уменьшается.
Выражения (7) и (8) для формы сигнала Δn(t) применимы для случая двух и более объектов контроля с ИИИ активностями A1 и А2 и т.д., движущихся по траектории 12 в сторону зоны контроля 13 с различными интервалами τ, но с одинаковой для всех объектов скоростью ν. Для двух ИИИ выражения (7) будут представлять кусочно-непрерывную функцию от времени t, которая состоит из шести участков: три участка в соответствии с (8), отличающихся выражениями для сигналов Δn1(t), Δn2(t) и Δn3(t) от воздействия ИИИ с активностью А1 (в принятых обозначениях - KS1), и на точно такие же три участка, отличающихся выражениями для сигналов Δn1(t-τ), Δn2(t-τ) и Δn3(t-τ) от воздействия ИИИ с активностью А2 (в принятых обозначениях - KS2), но смещенные по шкале времени на величину τ.
На фиг. 7 показаны графики (формы сигнала Δn(t) в функции времени t, отражающие реакцию детектирующей аппаратуры, находящейся, как указано выше, в центре 13 зоны контроля, на два объекта с точечными ИИИ одинаковой активности, движущихся с одинаковой скоростью ν по траектории 12 в сторону зоны контроля 13 и пересекающую ее. Графики отличаются различными временными интервалами τ между объектами контроля:
- кривая 36 для интервала τ, равного 70 с; видно, что первый объект с ИИИ движется со стороны УДL, пересекает зону контроля 13 в момент времени 80 с, второй объект с ИИИ движется вслед за первым и пересекает зону контроля 13 на 150 с, т.е. через 70 с; при этом наблюдается некоторое уменьшение второго пика от первого источника при пересечении им зоны контроля и, наоборот, небольшое увеличение второго пика второго источника после пересечения им зоны контроля на 150 с (сказывается слабое взаимное влияние источников);
- кривая 37 для интервала г, равного 15 с; видно, что первый объект с ИИИ движется со стороны УДL, пересекает зону контроля 13 в момент времени 82 с, второй объект с ИИИ движется вслед за первым и пересекает зону контроля 13 на 94 с, т.е. через 12 с, а не через 15 с, при этом наблюдается существенное изменение амплитуд пиков (взаимное влияние источников усилилось из-за уменьшения расстояния между ними);
- кривая 38 для интервала τ, равного 10 с; детектирующая аппаратура не различает источники и считает их как один квазиточечный (или протяженный в зависимости от времени задержки до появления второго пика) ИИИ.
Из графиков фиг. 7 видно, что детектирующая аппаратура различает отдельно движущие объекты с ИИИ до тех пор, пока второй пик от первого источника превышает по абсолютному значению порог обнаружения 40 (это кривые 36 и 37). Если это не происходит, то аппаратура воспринимает два синхронно движущихся источника как один квазиточечный ИИИ, так называемый «дубль», (кривая 38), при этом точка пересечения кривой 38 с осью времени при одинаковой активности источников лежит посредине между моментами времени появления первого и второго пиков.
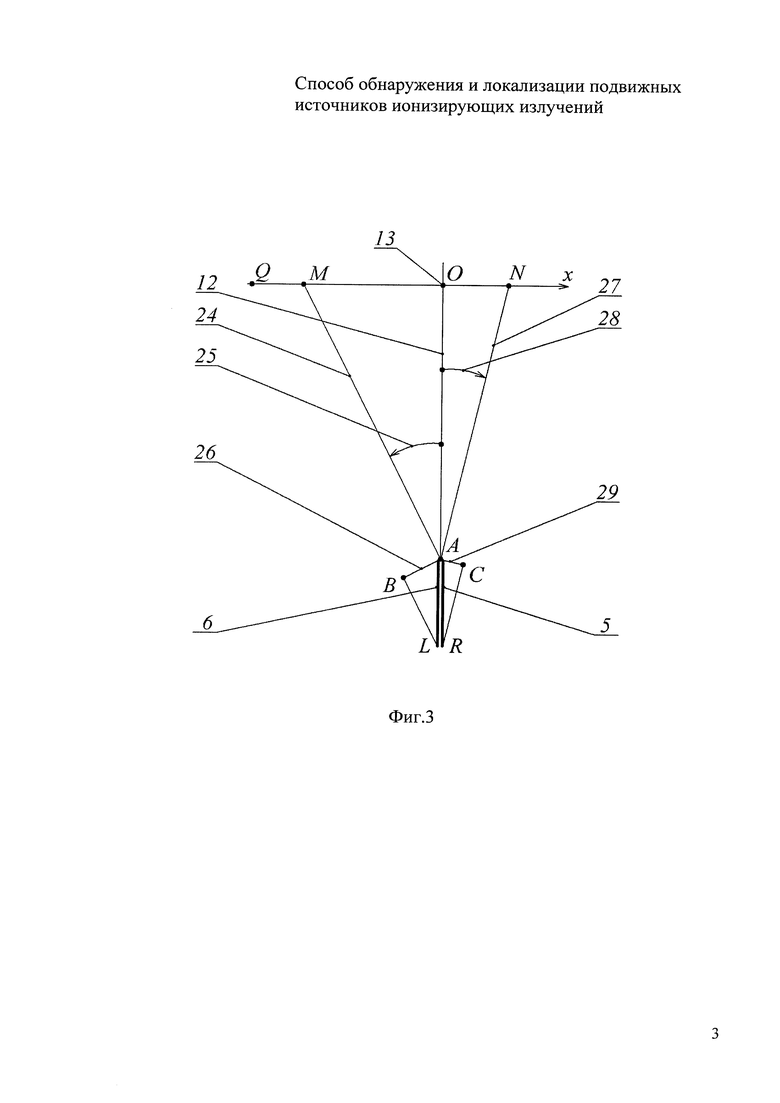
На фиг. 8 представлены графики формы сигнала Δn(t) для двух объектов с ИИИ, имеющими разные активности и движущиеся с одинаковой скоростью ν со сдвигом по времени τ, равным 13 с, по траектории 12 в сторону зоны контроля 13 и пересекающую ее. На верхнем графике представлена форма сигнала Δn(t) 41 при активности первого источника в два раза большей чем активность второго, а на нижнем - форма сигнала Δn(t) 42 при активности второго источника в два раза большей чем активность первого. Видно, что точки пересечения кривых 41 и 42 с осью времени смещены в сторону соответствующего большего пика. В обоих случаях детектирующая аппаратура будет воспринимать оба источника как единый (как «дубль»). При τ, превышающих 13 с, аппаратура обеспечит раздельную локализацию этих ИИИ.
Итак, предлагаемый способ заключается в выполнении следующей последовательности действий.
1 В начальный момент времени объект с точечным ИИИ находится вне зоны чувствительности детектирующей аппаратуры. При этом вычислитель 23 вырабатывает сигнал Δn(t) 32 (например, для фиксированного угла ψ, равного 10°) разности средних скоростей счета импульсов (аддитивной суммы сигнала ИИИ и фона) от УДR 1 и от УДL 2, вычисляемый, например, методом скользящего интервала за некоторое время te. Параллельно вычислитель формирует сигнал Δn(tb) за фиксированный скользящий интервал времени tb значительно больший te (на один-два порядка), выбираемый для получения статистики требуемого качества.
Учитывая, что в сигналах Δn(t) и Δn(tb), среднее значение скорости счета фона b(t) скомпенсировано, приближенное выражение для среднеквадратического отклонения (СКО) σ(tb) разностного сигнала Δn(tb) примет вид:

При отсутствии ИИИ математические ожидания (МО) сигналов nR (tb) и nL(tb) - составляющих сигнала Δn(tb) - приближенно принимают равными, что можно записать в следующем виде:

где: MΔn(tb), M(nR(tb)) и M(nL(tb)) - соответственно МО сигналов Δn(tb), nR(tb) и nL(tb) осредненные за время tb,
ε - коэффициент, зависящий от идентичности параметров УДR и УДL, выбирается из диапазона 0,01…0,05.
Тогда (при отсутствии ИИИ в зоне чувствительности УД) будет иметь место выражение для диапазона изменения сигнала Δn(tb):

которое с учетом неравенства (5), пренебрегая величиной ⎪εσ(tb)⎪ по сравнению с величиной |±3 σ(tb)⎪, можно записать в виде:

Таким образом, когда выполняется соотношение (5), вычислитель 23 будет вырабатывать сигнал Δn(tb), определяющий зону нечувствительности ±3 σ(tb), которую логично считать порогом обнаружения ИИИ. Но, как во всяком случайном процессе, возможны выбросы, при появлении которых возможно появление сигнала ложной тревоги. Поэтому в качестве порога обнаружения принимают равенства:

где: Кэф>1 - коэффициент эффективности критерия обнаружения, ±q0 - верхний и нижний пороги обнаружения.
Тогда условием обнаружения ИИИ является выполнение неравенства

На фиг. 9 показана зона нечувствительности ±3σ(tb) 39 и пороги обнаружения ±q0 40, а на фиг. 7 и фиг. 8 - пороги обнаружения ±q0 40.
2 При появлении в зоне «видимости» УД (на фиг. 9 - УДL) точечного ИИИ в момент времени t1 сигнал Δn(t) 32 превысит по абсолютному значению порог -q0 40. Аппаратура при этом выработает сигнал «ОБНАРУЖЕНИЕ», который служит для оповещения о том, с какой стороны объект с ИИИ приближается к зоне контроля.
3 Начиная с момента времени t1 вычислитель 23 прекращает вырабатывать сигнал Δn(tb), определяющий зону нечувствительности ±3 σ(tb), «замораживая» ее значение по состоянию на момент времени t1, и начинает вычисление производной от сигнала Δn(t) 32 по времени, фиксируя ее максимальное значение по модулю  до момента времени t2, когда производная становится равной нулю и в дальнейшем меняет знак.
до момента времени t2, когда производная становится равной нулю и в дальнейшем меняет знак.
4 В момент времени t3 объект с ИИИ пересекает границу зоны контроля в точке минус r0tgψ, затем в момент времени t4 находится в центре этой зоны и в момент t5 выходит из нее - в точке r0tgψ. Начиная с момента времени t3, вычислитель 23 продолжает вычисление сменившей знак производной от Δn(t) по времени и фиксирует ее максимальное значение по модулю  до момента времени t5 выхода объекта с источником из зоны контроля.
до момента времени t5 выхода объекта с источником из зоны контроля.
5 Ключевым моментом в формировании сигнала о локализации обнаруженного точечного (одиночного) ИИИ является фиксация смены знака сигнала Δn(t) 32 во временном промежутке t3-t5, когда объект с ИИИ находится в зоне контроля. При этом, как это следует из проведенного выше анализа, максимум модуля производной  , вычисленной на участке t3-t5, должен быть больше максимума модуля производной
, вычисленной на участке t3-t5, должен быть больше максимума модуля производной  на участке t1-t2. Конкретно смена знака сигнала Δn(t) 32 должна произойти в момент времени, когда сигнал 32 превысит зону нечувствительности 39, но гарантированно это произойдет, когда сигнал 32 превысит порог 40 - на отрезке времени t4-t5 (при движении объекта с ИИИ со стороны УДL).
на участке t1-t2. Конкретно смена знака сигнала Δn(t) 32 должна произойти в момент времени, когда сигнал 32 превысит зону нечувствительности 39, но гарантированно это произойдет, когда сигнал 32 превысит порог 40 - на отрезке времени t4-t5 (при движении объекта с ИИИ со стороны УДL).
Таким образом, при выполнении этих условий аппаратура выработает сигнал «ЛОКАЛИЗАЦИЯ» точно в момент времени пересечения объектом с точечным ИИИ зоны контроля.
Примечание: При появлении объекта с ИИИ со стороны УДR (на фиг. 9 - справа) смена знака сигнала Δn(t) 32 должна произойти во временном промежутке t3-t4.
6 На участке t6-t7 объект с ИИИ удаляется от зоны контроля, при этом происходит новая смена знака производной сигнала Δn(t) по времени, и максимум модуля производной  на участке t6 - t7 при этом не должен превышать максимума модуля производной на участке t3-t5. Выполнение этого условия, а также равенство первого и второго пиков по модулю являются косвенным подтверждением пересечения зоны контроля точечным (одиночным) ИИИ.
на участке t6 - t7 при этом не должен превышать максимума модуля производной на участке t3-t5. Выполнение этого условия, а также равенство первого и второго пиков по модулю являются косвенным подтверждением пересечения зоны контроля точечным (одиночным) ИИИ.
7 В момент времени t7 УДR прекращает «видеть» ИИИ. Начиная с этого момента, вычислитель 23 вновь начнет вырабатывать сигнал Δn(tb), определяющий зону нечувствительности ±3 σ(tb), за счет чего происходит адаптация алгоритма обнаружения к изменениям случайной составляющей естественного радиационного фона.
Таким образом, предлагаемый способ обнаружения и локализации подвижных ИИИ в зоне контроля обеспечивает:
- адаптацию алгоритма обнаружения ИИИ к естественному радиационному фону за счет компенсации его среднего значения и за счет автоматической коррекции величины порога обнаружения на изменения его случайной составляющей,
- повышение вероятности обнаружения ИИИ за счет применения в качестве критерия порога обнаружения, зависящего только от случайной составляющей радиационного фона, вызываемой радиационным распадом, и не зависящего от уровня самого фона и его флуктуаций,
- высокую скорость инспекции (оперативность и непрерывность контроля) за счет исключения необходимости замера счетности фона и выдержки инспектируемого объекта в зоне контроля определенное время для набора статистики,
- исключение необходимости применения датчиков присутствия инспектируемого объекта в зоне контроля, что позволяет быстрое развертывание радиационного поста контроля на необорудованной местности,
- определение направления приближения объекта с ИИИ до пересечения им зоны контроля,
- высокую точность локализации обнаруженного ИИИ -фиксирование момента времени пересечения источником зоны контроля,
- раздельную локализацию ИИИ, следующих друг за другом,
- возможность прогнозирования появления второго источника при локализации первого.
Пример использования предлагаемого способа. Пешеходный монитор.
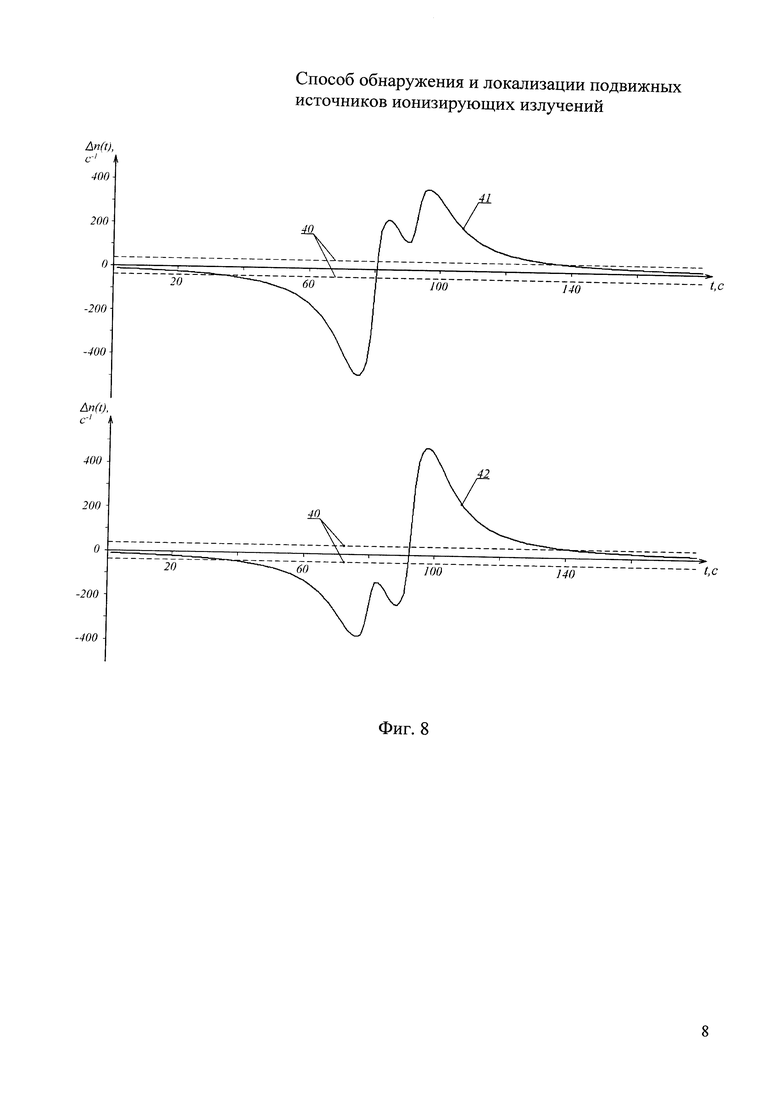
Детектирующая аппаратура пешеходного монитора, построенная по дифференциальной схеме включения УД и обеспечивающая обнаружение и локализацию подвижных ИИИ по предлагаемому способу, должна иметь четное количество этих устройств. На фиг. 10 приведена схема такой аппаратуры на примере двух УД плотности потока гамма-излучения, представляющих собой широкоугольные сцинтилляционные пластиковые детекторы, помещенные в светонепроницаемые кожухи. Детекторы коллимированы свинцовыми экранами-поглотителями гамма-излучения таким образом, что каждый из них (детекторов) имеет по одному входному окну для регистрации гамма-излучения. Оба УД - правый УДR 1 и левый УДL 2 с экранами-поглотителями 3 гамма-квантов установлены на неподвижной платформе 4 таким образом, что их входные окна -соответственно 5 и 6, образующие острый двугранный угол 7 2ψ с биссекторной плоскостью 8, направлены в противоположные стороны.
Продолжение биссекторной плоскости 8 - контрольная полуплоскость 20 - образует зону контроля 13 при пересечении с траекторией движения 12 контролируемых объектов.
С каждым детектором оптически связан фотоэлектронный умножитель 43 (с блоком высоковольтного питания), преобразующий световые сцинтиимпульсы детектора в электрические сигналы, которые после усиления в усилителе-формирователе 44 являются выходными («сырыми») сигналами 45 от УДR и 46 от УДL, мгновенные значения которых равны соответственно  и
и  . Эти сигналы поступают на контроллер 47, формирующий разностный сигнал Δn(t):
. Эти сигналы поступают на контроллер 47, формирующий разностный сигнал Δn(t):
Δn(t)=nR(t) - nL(t),
где: nR(t) и nL(t) - средние значения соответственно сигналов  и
и  , вычисленные, например, методом скользящего интервала за некоторое время te. Сигнал Δn(t) является информационным сигналом, положенным в основу работы пешеходного монитора.
, вычисленные, например, методом скользящего интервала за некоторое время te. Сигнал Δn(t) является информационным сигналом, положенным в основу работы пешеходного монитора.
Назначение детектирующей аппаратуры, приведенной на фиг. 10, - получение необходимой физической информации о радиационной обстановке в зоне контроля 13 и прилегающей территории. Формирование алгоритма и реализация решения задач обнаружения и локализации ИИИ лежит на контроллере 47. Кроме логических, арифметических операций и операции фильтрации необходимо решить проблему дифференцирования сигнала Δn(t) по времени. Реальные сигналы от детектирующей аппаратуры существенно отличаются от рассматриваемых выше теоретических. Различия вызваны, главным образом, флуктуациями сигналов скоростей счета суммы сигнала и радиационного фона из-за вероятностной природы радиоактивного распада. На фиг. 11 показана расчетная форма сигнала Δn(t) 32 при движении объекта с ИИИ 19 со стороны УДL 2 и реальный вид сигнала Δn(t) 47 при тех же условиях. Видно, что показанная на фиг. 11 кривая 47 в классическом смысле недифференцируема.
Для приведения кривой 47 к виду, пригодному для дифференцирования, можно воспользоваться сглаживанием, усредняя сигнал методом "скользящего интервала" или применить иной алгоритм цифровой фильтрации, например, фильтр Калмана. Недостатки этих способов очевидны - применение подобных алгоритмов приведет, во-первых, к общему уменьшению амплитуды сигнала, во вторых, к сдвигу всей кривой по шкале времени (запаздыванию). Первое приведет к "пропуску" слабого ИИИ, второе - к ошибке в локализации.
Одним из приемлемых способов решения задачи приведения кривой сигнала к виду, пригодному для дифференцирования, является применение алгоритма компрессии данных SwingingDoor, описанного в патенте US 4669097 A «Data compression for display and storage», 1987 г. Алгоритм заключается в выборе «нужных» данных из входного потока Δn(t). При этом прореженные данные не должны изменять общее представление о процессе, а все локальные экстремумы графика с определенной точностью должны присутствовать в прореженных данных. Другими словами, если пропущено несколько точек между двумя сохраненными, то прямая, соединяющая сохраненные точки, будет отстоять от этих пропущенных точек не более чем на заданную погрешность.
Применение алгоритма позволяет из всего множества результатов вычислений сигнала Δn(t) оставить лишь некоторые значения, лежащие на тренде кривой сигнала (далее по тексту - "узловые значения", «узловые точки»). Значения Δn(t), лежащие в промежутках между узловыми точками, отбрасываются, но информация о том, сколько их было, сохраняется, что позволяет вычислить производную для текущей узловой точки.
На фиг. 12 в графическом виде показана работа алгоритма SwingingDoor. Шаг итераций соответствует времени поступления "мгновенных" значений сигнала, обозначенных как квадратные метки с обозначениями от D1 до D6. Цифровая индикация всех меток и отрезков соответствует номеру итерации, на которой они были получены.
Итерация 1. Получено "мгновенное" значение сигнала Δn(t) D1. Первое полученное значение автоматически признается узловым, относительно него строится базис, образованный точками Ub1 и Lb1 отложенными соответственно вверх и вниз от узлового значения D1 на величину некоторой постоянной ошибки Е, выбираемая путем экспертной оценки. Счетчик итераций, прошедших от получения узловой точки, обнуляется.
Итерация 2. Получено "мгновенное" значение сигнала Δn(t) D2. Из точки Ub1 строится луч U2, проходящий через точку D2, из точки Lb1 строится луч L2, также проходящий через точку D2. Лучи U2 и L2 образуют треугольник Ub1Lb1D2. Счетчик итераций, прошедших от получения узловой точки, увеличивается на единицу.
Итерация 3. Получено "мгновенное" значение сигнала Δn(t) D3. Выполняется проверка на принадлежность точки D3 треугольнику Ub1LblD2. Точка D3 не принадлежит данному треугольнику, поэтому она не признается узловой. Счетчик итераций, прошедших от получения узловой точки, увеличивается на единицу. Поскольку по амплитуде точка D3 меньше точки D2, луч U2 остается неизменным, а из точки Lb1 строится новый луч L3, проходящий через точку D3. Лучи U2 и L3 пересекаются в точке Р3, образуя треугольник Ub1Lb1P3.
Итерация 4. Получено "мгновенное" значение сигнала Δn(t) D4. Выполняется проверка на принадлежность точки D4 треугольнику Ub1Lb1P3. Точка D4 не принадлежит данному треугольнику, поэтому она не признается узловой. Счетчик итераций, прошедших от получения узловой точки, увеличивается на единицу. Поскольку по амплитуде точка D4 больше точки D3, луч L3 остается неизменным, а из точки Ub1 строится новый луч U4, проходящий через точку D4. Лучи U4 и L3 пересекаются в точке Р4, образуя треугольник Ub1Lb1P4.
Итерация 5. Получено "мгновенное" значение сигнала Δn(t) D5. Выполняется проверка на принадлежность точки D5 треугольнику Ub1Lb1P4. Точка D5 принадлежит данному треугольнику, поэтому она признается узловой точкой. Отрезок D1-D5 принимается за эквивалент ломаной кривой, образованной отрезками D1-D2-D3-D4-D5. Счетчик итераций, прошедших от получения узловой точки, увеличивается на единицу, после чего вычисляется производная между узловыми точками D1 и D5 как отношение разности значений D5-D1 к количеству итераций.
Относительно новой узловой точки D5 строится базис, образованный точками Ub5 и Lb5, отложенными соответственно вверх и вниз от узлового значения D5 на величину ошибки Е. Счетчик итераций, прошедших от получения узловой точки, обнуляется.
Итерация 6. Получено "мгновенное" значение сигнала Δn(t) D6. Из точки Ub5 строится луч U6, проходящий через точку D6, из точки Lb5 строится луч L6, также проходящий через точку D6. Лучи U6 и L6 образуют треугольник Ub5Lb5D6. Счетчик итераций, прошедших от получения узловой точки, увеличивается на единицу.
Дальнейшая работа алгоритма происходит аналогично описанному ранее, начиная с итерации 3.
Контроллер решает следующие задачи:
- сглаживает (фильтрует) сырые значения  и
и  до средних значений nR(t) и nL(t) соответственно,
до средних значений nR(t) и nL(t) соответственно,
- вычисляет разностный сигнал Δn(t),
- усредняет Δn(t) за время te,
- усредняет Δn(t) за время tb в отрезки времени, когда выполняется условие (5),
- вычисляет СКО σ(tb),
- вычисляет порог обнаружения  ,
,
- проверяет выполнение неравенств  ,
,
- формирует сигнал «ОБНАРУЖЕНИЕ» при выполнении (7),
- вычисляет производные по времени от Δn(t) и определяет максимальные значения  и
и 
- фиксирует момент смены знака сигнала Δn(t) и, если при этом имеет место неравенство  >
>  , вырабатывает сигнал «ЛОКАЛИЗАЦИЯ».
, вырабатывает сигнал «ЛОКАЛИЗАЦИЯ».
Пешеходный монитор устанавливают по створу ворот на некотором расстоянии от траектории движения контролируемых объектов. Возможна установка двух (правой и левой) фотокамер, позволяющих фиксировать лица проходящих через ворота в обоих направлениях.
Работа монитора не требует присутствия оператора. Экспериментальная проверка работоспособности предлагаемого способа осуществлена на макетном образце монитора гамма-излучения, изготовленного по схеме на фиг. 10.
На фиг. 13 представлен график 47 экспериментальной кривой сигнала Δn(t) и результат его обработки по алгоритму SwingingDoor - кривая 48. Точки на кривой 48 являются вычисленными узловыми значениями. Представлены также в некотором масштабе с учетом знаков производные 49 dΔn(t)/dt, соответствующие каждому отрезку времени между вычисленными узловыми значениями. Видно, что максимальное значение производной  на участке от t1 до первого экстремума меньше максимального значения производной
на участке от t1 до первого экстремума меньше максимального значения производной  на участке от первого экстремума до момента времени t2.
на участке от первого экстремума до момента времени t2.
Сигнализация выполнена на выносном индикаторе (на фиг. 10 не показан), содержащем три светодиода и источник звукового сигнала тревоги при локализации (фиксации момента пересечения источником зоны контроля). Правый или левый светодиоды миганием указывают направление, с которого приближается источник, а центральный светодиод загорается и срабатывает звуковая сигнализация в момент пересечения источником линии контроля. Одновременно с этим возможна отправка команды на соответствующую фотокамеру.
В случае нештатной ситуации, когда объект с ИИИ подошел к зоне контроля, замигал соответствующий светодиод, а объект повернул назад - замигают оба светодиода, сигнализируя о ложной тревоге.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поиска источников ионизирующих излучений | 2017 |
|
RU2655044C1 |
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2011 |
|
RU2456638C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2022 |
|
RU2785525C1 |
| Способ локализации источников ионизирующих излучений мобильными комплексами радиационного контроля | 2020 |
|
RU2748937C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2003 |
|
RU2242024C1 |
| Способ поиска и обнаружения источников ионизирующих излучений с анализом времени регистрации частиц | 2025 |
|
RU2840106C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ СЛАБЫХ ПОТОКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2006 |
|
RU2293999C1 |
| Способ динамического радиационного контроля | 2020 |
|
RU2738661C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ИСТОЧНИКА ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ В ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 1998 |
|
RU2142644C1 |










Изобретение относится к области радиационного контроля (РК). Сущность изобретения заключается в том, что способ обнаружения и локализации подвижных источников ионизирующих излучений (ИИИ) в зоне контроля дополнительно содержит этапы, на которых располагают УД таким образом, чтобы контрольная полуплоскость - продолжение биссекторной плоскости упомянутого двугранного угла - пересекала траекторию перемещения контролируемых объектов в зоне контроля, вырабатывают сигнал «ОБНАРУЖЕНИЕ» при выполнении условия |Δn(t)|>Кэф⋅|±3 σ(tb)|, где Кэф>1 - коэффициент эффективности критерия обнаружения, σ(tb) - среднеквадратическое отклонение сигнала Δn(tb), усредняемого за время tb, достаточное для получения статистики требуемого качества, в интервалах времени, когда отсутствует сигнал об обнаружении, определяют по знаку сигнала Δn(t) сторону, с которой приближается объект контроля с обнаруженным ИИИ, вычисляют максимум модуля скорости изменения разностного сигнала max|dΔn(t)/dt|1 до смены ее знака и max|dΔn/dt|2 - после смены и вырабатывают сигнал «ЛОКАЛИЗАЦИЯ» (момент времени пересечения обнаруженным источником зоны контроля) после смены знака разностного сигнала Δn(t) и при выполнении условия max|dΔn(t)/dt|2 > max|dΔn(t)/dt|1. Технический результат – повышение вероятности заблаговременного обнаружения источников ИИИ. 13 ил.
Способ обнаружения и локализации подвижных источников ионизирующих излучений (ИИИ) в зоне контроля, заключающийся в использовании четного количества одинаковых широкоугольных сцинтилляционных или газонаполненных устройств детектирования (УД) - группы правых УДR и группы левых УДL, разделенных экранами-поглотителями излучения с направленными попарно в противоположные стороны входными окнами, образующими острый двугранный угол 2ψ, и предназначенных для измерения каждой из них с последующим вычислением средних скоростей счета - соответственно  и
и  - аддитивных сумм сигналов каждой группы и радиационного фона, и в определении разностного сигнала
- аддитивных сумм сигналов каждой группы и радиационного фона, и в определении разностного сигнала
 ,
,
отличающийся тем, что располагают УД таким образом, чтобы контрольная полуплоскость - продолжение биссекторной плоскости упомянутого двугранного угла - пересекала траекторию перемещения контролируемых объектов в зоне контроля, вырабатывают сигнал «ОБНАРУЖЕНИЕ» при выполнении условия
|Δn(t)|>Кэф⋅|±3 σ(tb)|,
где Кэф>1 - коэффициент эффективности критерия обнаружения, σ(tb) - среднеквадратическое отклонение сигнала Δn(tb), усредняемого за время tb, достаточное для получения статистики требуемого качества, в интервалах времени, когда отсутствует сигнал об обнаружении, определяют по знаку сигнала Δn(t) сторону, с которой приближается объект контроля с обнаруженным ИИИ, вычисляют максимум модуля скорости изменения разностного сигнала max|dΔn(t)/dt|1 до смены ее знака и max|dΔn/dt|2 - после смены и вырабатывают сигнал «ЛОКАЛИЗАЦИЯ» (момент времени пересечения обнаруженным источником зоны контроля) после смены знака разностного сигнала Δn(t) и при выполнении условия
max|dΔn(t)/dt|2 > max|dΔn(t)/dt|1.
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| Способ автоматического определения местоположения точечного источника гамма-излучения на местности | 2016 |
|
RU2620451C1 |
| US 5286973 A1, 15.02.1994 | |||
| WO 2002016965 A2, 28.02.2002. | |||

