Изобретение относится к промышленному рыболовству, в частности к техническим средствам для подледного лова рыбы, и может быть использовано также при заводке орудий лова, например неводов, сетей, ловушек, под лед в исходное положение, а также при прокладке подводных (поперек реки) других протяженных технических сооружений, например трубопроводов.
Известен способ прокладки подо льдом рыболовецкой сети [1], при котором сеть устанавливается подо льдом при помощи предварительно протянутой под ним веревки. Ее протягивают подо льдом при помощи шеста, который вместе с привязанной к нему веревкой перемещается подо льдом "со шилом", опускаемым последовательно в лунки, специально пробитые во льду вдоль направления будущего расположения сети.
Недостатки этого способа заключаются в том, что он применим только в случае сравнительно тонкого льда и требует пробивания большого количества вспомогательных лунок, особенно если сеть имеет большую длину.
Известны различные способы усовершенствования конструкции устройств для прокладки подо льдом орудий лова. Например, известна конструкция устройства для протягивания линя подо льдом в виде рычажного прогона [2, с.401-402]. Важным достоинством данного устройства является возможность определения его местоположения подо льдом, устанавливаемого по металлическому стуку, производимому молоточком по наковаленке при подергивании гонка.
Известен прогон конструкции Т.Т.Кондратьева [2] с движителем в виде спиральной пружины.
Из-за относительной сложности конструкции, а также сложности поиска подо льдом при отклонении от заданного направления из-за неровности нижней поверхности льда или наличия течения эти прогоны не получили широкого распространения.
Известно устройство для протягивания линя подо льдом [3], состоящее из деревянного веретенообразного обладающего плавучестью шеста прогона и линя, закрепленного на одном его конце. Для перемещения прогона с линем подо льдом от лунки к лунке используется специальная вилка-гоняло и крючок.
Рыбак через лунку гонялом совершает маятниковые движения перехватами, перемещая таким образом прогон за каждое движение на расстояние, равное диаметру лунки. Второй рыбак крючком ловит передний конец прогона в следующей лунке. После чего цикл повторяется: рыбак с гонялом переходит к лунке, через которую второй рыбак удерживает конец прогона, и перемещает его к следующей лунке, куда переходит второй рыбак.
Недостатками этого устройства являются затраты значительного количества времени на перемещение прогона и большие трудозатраты на бурение лунок большого диаметра.
Указанные недостатки уменьшены в известном устройстве [4] для протягивания линя подо льдом, состоящем из веретенообразного обладающего плавучестью прогона, оборудованного на переднем конце притапливающим грузом, и снабженном дополнительным линем, закрепленным на обоих концах прогона и выполненным из тонущего в воде материала.
Через запускную майну рыбак заводит под лед прогон в направлении ближайшей лунки и удерживает его гонялом до тех пор, пока второй рыбак не поймает крючком и не вытащит на лед петлю дополнительного линя. Затем, перебирая руками линь, второй рыбак перемещает прогон к следующей лунке, таким образом повторяя эти операции до тех пор, пока не закончится постановка орудия лова рыбы в исходное положение. Данное изобретение сокращает трудозатраты изготовлением лунок минимального диаметра, достаточного лишь для прохода гоняла (вилки), и также сокращает время цикла заводки орудия лова рыбы под лед в исходное положение. Кроме того, изобретение обладает сравнительно малым износом тела прогона.
Несмотря на ряд проведенных усовершенствований, тем не менее, общим недостатком вышеперечисленных способов установки подо льдом рыболовецких снастей и устройств для его осуществления являются большие трудозатраты и длительное время завода орудия лова рыбы под лед в исходное положение.
Известна радиоуправляемая рыболовная снасть [5], используемая в любительском и спортивном рыболовстве. Снасть включает удилище с установленным на нем пультом управления и передатчиком электромагнитных колебаний и радиоуправляемый поплавок с привязанным к нему рыболовным крючком, содержащий приемник электромагнитных колебаний, два электродвигателя с гребными винтами. Манипуляцией ручек пульта управления осуществляют формирование управляющих радиокоманд, направляющих поплавок в заданное место водоема, или осуществляют транспортировку насадки по акватории водоема.
Недостатком данного способа лова и устройства для его осуществления является невозможность их использования для протягивания затравочного фала (лески) при подледном промышленном лове рыбы, что обусловлено неприспособленностью поплавка для подледного погружения, отсутствием возможности управления его передвижением подо льдом и контроля его местоположения. Кроме того, водная среда и лед в значительной степени ограничивают возможность распространения электромагнитных радиоволн, а следовательно, исключается возможность радиосвязи подводного средства и устройства, находящегося на поверхности льда.
Известен способ установки подо льдом реки поперек течения рыболовецких снастей [6]. Сущность способа заключается в использовании для протягивания затравочного фала подо льдом двух гидродинамических устройств пассивного типа, перемещаемых под действием течения реки и под действием боковой гидродинамической силы при видоизменении аппарата. Эффективность действия подобного устройства возможна только при наличии течения воды, что исключает его применение в водоемах со стоячей водой. Другим недостатком способа является потребность пробивания во льду большого количества лунок.
Исключение многих указанных недостатков приведенных аналогов обеспечивается известным и наиболее близким к заявленному и принятым за прототип способом размещения подо льдом рыболовецкой сети [7, 6], при котором затравочный фал протягивается подо льдом при помощи специального самоходного подводного аппарата. Описание различных модификаций таких аппаратов показано, например, в работе [7].
Данный способ осуществляется в следующей последовательности действий.
Пробиваются две лунки на расстоянии, приблизительно равном длине сети. В первую лунку с помощью устройства захвата под воду опускается аппарат, к корпусу которого крепится затравочный фал. Коренной конец этого фала остается на поверхности льда. Во вторую лунку опускается специальный гидроакустический маяк, на который наводится аппарат. Аппарат, снабженный акустической системой самонаведения, при помощи своего двигательно-движительного комплекса перемещается подо льдом в направлении на маяк, выматывая затравочный фал. При подходе ко второй лунке аппарат при помощи устройства захвата поднимается на поверхность льда вместе с затравочным фалом, который оказывается таким образом протянутым между двумя лунками.
Недостатком этого способа является необходимость для его реализации самоходного аппарата со сложной акустической системой самонаведения и акустического маяка, заметно усложняющих реализацию этого способа, связанную с большими материальными затратами, исключающими возможность ее осуществления в малых и отдаленных хозяйствах.
Устройство для осуществления этого способа содержит в своем комплекте гидроакустический маяк, установленный во второй (финишной) лунке во льду, устройство захвата подводного аппарата и подводный аппарат (снаряд), включающий акустическую систему самонаведения с акустическим приемным устройством и блоком коммутации, входы управления которого подключены соответственно к выходам акустического приемного устройства, двигательно-движительный комплекс, содержащий, например, правый и левый гребные винты с электроприводом, электродвигатели которых подключены соответственно к первому и второму выходам блока коммутации, и источник электрической энергии, выход которого подключен к входу блока коммутации, а через включатель подключен к цепям питания акустической системы самонаведения и двигательно-движительного комплекса.
Устройство работает следующим образом.
Перед опусканием в первую лунку подводного аппарата включают его электропитание с помощью включателя, герметично установленного в его корпусе. При этом обеспечивается подача выходного напряжения источника электроэнергии в цепи питания акустической системы самонаведения и двигательно-движительного аппарата. Гидроакустический маяк, установленный в воде через вторую лунку, также находится во включенном состоянии. В первую лунку с помощью устройства захвата опускается подводный аппарат с закрепленным к нему затравочным фалом. Аппарат наводится на гидроакустический маяк и начинает перемещаться подо льдом в направлении маяка, выматывая затравочный фал. При возможных отклонениях направления движения аппарата осуществляется автоматическая корректировка его движения с помощью акустической системы самонаведения. Процесс управления движением осуществляется формированием следующих оперативных команд управления двигательно-движительным устройством: "Поворот вправо", "Движение прямо", "Поворот влево" и "Стоп", формируемых приемным акустическим устройством подводного аппарата по принимаемым сигналам гидроакустического маяка. Выходными командами приемного акустического устройства осуществляется управление гребными винтами двигательно-движительного комплекса. В данном случае каждый гребной винт приводится в движение от своего электродвигателя, управляемого соответствующей командой, обеспечивающей подачу на него или отключение выходного напряжения источника электроэнергии с помощью управляемого блока коммутации. При появлении подводного аппарата во второй лунке устройством захвата осуществляется его захват и подъем через лунку на поверхность льда вместе с затравочным фалом, который оказывается таким образом протянутым между двумя лунками. Затем с помощью включателя осуществляется выключение автономного электропитания аппарата.
Недостатками этого устройства являются его сложность и высокая стоимость изготовления и эксплуатации, обусловленные необходимостью применения гидроакустического маяка и сложностью реализации системы автоматического самонаведения.
Техническим результатом изобретения является упрощение способа и его реализации при обеспечении достаточно малого времени протягивания затравочного фала от лунки к лунке, а также снижение трудозатрат, стоимости изготовления и эксплуатации устройства для его осуществления.
Предлагаемое техническое решение представляет собой три варианта способа для установки подо льдом рыболовецких снастей протягиванием лески (затравочного фала) использованием самоходного подводного снаряда (аппарата) и три варианта устройства для осуществления этого способа, связанных между собой настолько, что они образуют единый изобретательский замысел.
Технический результат достигается тем, что в способе (по первому варианту), включающем пробивание во льду двух лунок на расстоянии, приблизительно равном длине сети, опускание в первую (стартовую) лунку под воду рыболовом с помощью устройства захвата самоходного подводного снаряда с закрепленным к его корпусу затравочным фалом (леской), коренной конец которого остается на поверхности льда, задание нужного направления движения подводного снаряда, который при помощи своего двигательно-движительного устройства перемещается подо льдом в заданном направлении установки сети, пробивание второй (финишной) лунки осуществляется в конце процесса перемещения подводного снаряда, при этом при движении подводного снаряда непрерывно определяется его местоположение прослушиванием (приемным устройством) излучаемых им сигналов вторым рыболовом, следующим за ним по льду, при достижении подводным снарядом расстояния, приблизительно равного длине сети, натяжением лески первым рыболовом через первую лунку он останавливается и впереди его по ходу движения пробивается вторая лунка, например, вторым рыболовом, далее первым рыболовом отпускается леска до появления подводного снаряда во второй лунке, который вытаскивается вторым рыболовом с помощью устройства захвата на поверхность льда вместе с леской, которая оказывается таким образом протянута между двумя лунками, при сопровождении подводного снаряда обнаружение сигналов осуществляется на основе использования индуктивной связи приемного устройства второго рыболова и передающего устройства подводного снаряда.
Технический результат достигается тем, что в способе (по второму варианту), включающем пробивание во льду двух лунок на расстоянии, приблизительно равном длине сети, опускание в первую (стартовую) лунку под воду рыболовом с помощью устройства захвата самоходного подводного снаряда с закрепленным к его корпусу затравочным фалом (леской), коренной конец которого остается на поверхности льда, задание нужного направления движения подводного снаряда, который при помощи своего двигательно-движительного устройства перемещается подо льдом в направлении на вторую лунку, направление движения и корректировка возможного отклонения от заданного направления осуществляются внешним дистанционным командоуправлением по проводной связи (связи пульта управления первого рыболова и подводного снаряда) через первую лунку первым рыболовом по наблюдаемому им движению второго рыболова, сопровождающего по льду подводный снаряд, своим движением обозначая его местоположение (траекторию движения), определяемое прослушиванием им с помощью приемного устройства излучаемых подводным снарядом сигналов, при появлении его во второй лунке он вытаскивается с помощью устройства захвата на поверхность льда вместе с леской, которая оказывается таким образом протянута между двумя лунками, при сопровождении подводного снаряда обнаружение сигналов осуществляется на основе использования индуктивной связи приемного устройства второго рыболова и передающего устройства подводного снаряда.
Технический результат достигается тем, что в способе (по третьему варианту), включающем пробивание во льду двух лунок на расстоянии, приблизительно равном длине сети, опускание рыболовом в первую лунку под воду устройством захвата подводного снаряда с закрепленной к его корпусу леской, коренной конец которой остается на поверхности льда, задание нужного направления движения и перемещение подводного снаряда подо льдом при помощи своего двигательно-движительного устройства в направлении на вторую лунку и при подходе к ней поднимание подводного снаряда на поверхность льда устройством захвата вместе с леской, которая оказывается таким образом протянута между двумя лунками, направление и корректировка возможного отклонения от заданного направления перемещения подводного снаряда обеспечиваются внешним дистанционным беспроводным командоуправлением по принимаемым сигналам, излучаемым подводным снарядом, определяющим его местоположение и направление движения, обнаружение сигналов и командоуправление осуществляются на основе использования индуктивной связи приемопередающих устройств подводного снаряда и рыболова, сопровождающего подводный снаряд по льду и производящего прослушивание сигналов и управление движением подводного снаряда.
Предлагаемое устройство (по первому варианту) для осуществления способа установки подо льдом рыболовецких снастей включает устройство захвата подводного снаряда, подводный снаряд с закрепленной к его корпусу леской, содержащий гребной винт, соединенный с электродвигателем, герметично установленный включатель и источник электроэнергии, выход которого подключен к выводу включателя, в комплект устройства дополнительно введен пеленгатор, содержащий приемное устройство с подключенной к нему приемной антенной, звуковой индикатор и источник электроэнергии, выход которого через включатель подключен к цепи питания приемного устройства, выход которого подключен к звуковому индикатору, причем подводный снаряд дополнительно содержит передающее устройство с подключенной к нему передающей антенной и генератор импульсов, выход которого подключен ко входу передающего устройства, электродвигатель и цепи питания передающего устройства и генератора импульсов подключены ко второму выводу включателя, конструктивно антенна пеленгатора установлена во внутренней нижней части полой (пластмассовой) трубы, причем приемная антенна пеленгатора и передающая антенна подводного снаряда изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи между подводным снарядом и пеленгатором, причем продольная ось стержня катушки антенны, закрепленной на подводном снаряде, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки антенны пеленгатора ориентирована вдоль продольной оси трубы, внутри которой установлена антенна.
Предлагаемое устройство (по второму варианту) для осуществления способа установки подо льдом рыболовецких снастей включает устройство захвата подводного снаряда и сам подводный снаряд с закрепленной к его корпусу леской, содержащий правый и левый гребные винты, подключенные соответственно к правому и левому электродвигателям, в комплект устройства дополнительно введены пульт дистанционного управления и пеленгатор, содержащий приемное устройство с подключенной к нему приемной антенной, звуковой индикатор и источник электроэнергии, выход которого через включатель подключен к цепи питания приемного устройства, выход которого подключен к звуковому индикатору, подводный снаряд дополнительно содержит передающее устройство с подключенной к нему передающей антенной и генератор импульсов, выход которого подключен ко входу передающего устройства, пульт дистанционного управления содержит свой источник электроэнергии, включатель, два переменных резистора и два ключа, причем выход источника электроэнергии подключен ко входу включателя, выход которого через первую цепь последовательного соединения первого переменного резистора, первого ключа и первого провода проводной линии и через вторую цепь последовательного соединения второго переменного резистора, второго ключа и второго провода проводной линии подключен соответственно к правому и левому электродвигателям, а через третий провод проводной линии связи - к цепям питания генератора импульсов и передающего устройства подводного снаряда, конструктивно приемная антенна пеленгатора установлена во внутренней нижней части полой (пластмассовой) трубы, причем приемная антенна пеленгатора и передающая антенна подводного снаряда изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи между подводным снарядом и пеленгатором, причем продольная ось стержня катушки антенны, закрепленной на подводном снаряде, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки антенны пеленгатора ориентирована вдоль продольной оси трубы, внутри которой установлена антенна.
Предлагаемое устройство (по третьему варианту) для осуществления способа установки подо льдом рыболовецких снастей включает устройство захвата подводного снаряда и подводный снаряд с закрепленной к его корпусу леской, содержащий правый и левый гребные винты, подключенные соответственно к правому и левому электродвигателям, включатель, источник электроэнергии и блок коммутации, первый и второй выходы которого подключены соответственно к правому и левому электродвигателям, а вход - к выходу источника электроэнергии, подключенного через включатель к цепи питания блока коммутации, дополнительно в комплект введен пульт пеленгации и дистанционного управления, содержащий приемо-передающее устройство с подключенной к нему приемо-передающей антенной, звуковой индикатор, генератор импульсов, выход которого подключен ко входу приемо-передающего устройства, блок формирования команд и источник электроэнергии, выход которого через включатель подключен к цепям питания генератора импульсов, блока формирования команд и приемо-передающего устройства, выход которого подключен к звуковому индикатору, а входы управления - соответственно к выходам блока формирования команд, причем подводный снаряд дополнительно содержит свое приемо-передающее устройство с подключенной к нему приемо-передающей антенной и генератор импульсов, выход которого подключен ко входу приемо-передающего устройства, первый и второй выходы которого подключены соответственно к первому и второму входам управления блока коммутации, причем цепи питания приемо-передающего устройства и генератора импульсов подключены к цепи питания блока коммутации, конструктивно антенна пульта пеленгации и дистанционного управления установлена во внутренней нижней части полой (пластмассовой) трубы, антенны пульта пеленгации и дистанционного управления и подводного снаряда изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи между подводным снарядом и пультом пеленгации и дистанционного управления, причем продольная ось стержня катушки антенны, закрепленной на подводном снаряде, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки антенны пульта пеленгации и дистанционного управления ориентирована вдоль продольной оси трубы, внутри которой установлена антенна.
Функциональные схемы устройства для протягивания сети подо льдом, позволяющие реализовать первый, второй и третий варианты способа, показаны соответственно на фиг.1, 2 и 4, а на фиг.3 - процесс протягивания лески подо льдом и комплект устройства для реализации третьего варианта способа.
В комплект устройства (фиг.1) по первому варианту входят подводный снаряд (ПС) 1 с закрепленной к его корпусу леской и пеленгатор 2. ПС 1 содержит гребной винт (ГВ) 3, соединенный с электродвигателем (ЭД) 4, передающее устройство 5 с подключенной к нему передающей антенной 6, генератор импульсов (ГИ) 7, выход которого подключен ко входу передающего устройства 5 и источник электроэнергии (ИЭЭ) 8, выход которого через герметично установленный включатель 9 подключен к ЭД 4 и цепям питания передающего устройства 5 и генератора импульсов 7. Пеленгатор 2 содержит приемное устройство 10 с подключенной к нему приемной антенной 11, звуковой индикатор (ЗИ) 12 и свой источник электроэнергии (ИЭЭ) 13, выход которого через включатель 14 подключен к цепи питания приемного устройства 10, выход которого подключен ко входу ЗИ 12. Конструктивно приемная антенна 11 пеленгатора установлена во внутренней нижней части полой (пластмассовой) трубы, причем антенны 6, 11 соответственно подводного снаряда 1 и пеленгатора 2 изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи между ПС 1 и пеленгатором 2, причем продольная ось стержня катушки антенны 6, закрепленной на ПС 1, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки антенны 11 пеленгатора 2 ориентирована вдоль продольной оси трубы, внутри которой установлена защищенная от влаги антенна 11. В качестве звукового индикатора в предлагаемом устройстве (по всем его вариантам) возможно использование ушного или головного телефонов или небольшой динамической головки.
ПС 1 является самоходным устройством, используемым для протягивания подо льдом лески между двумя последовательно пробиваемыми лунками. Движение ПС 1 осуществляется с помощью гребного винта 3, вращаемого электродвигателем 4. С помощью пеленгатора 2 прослушиванием звуковым индикатором 12 сигналов, излучаемых передающей антенной 6 подводного снаряда 1, осуществляется обнаружение и определение его местоположения в процессе перемещения. Формирование передающих сигналов на несущей частоте генератора импульсов 7 осуществляется передающим устройством 5. Приемным устройством 10 пеленгатора 2 с помощью приемной антенны 11 осуществляется прием сигналов подводного снаряда 1, усиление их и выдача для прослушивания на ЗИ 12.
Плохое распространение радиоволн в водной среде и отражение их от поверхности льда исключают целесообразность применения и реализации радиосвязи между самоходным подводным средством и устройством его обнаружения, располагаемого, например, на поверхности льда. Гидроакустический способ связи применяемый, например, в прототипе требует необходимости применения специальных антенн для приема и передачи акустических сигналов и гидроакустического маяка - излучателя акустических сигналов, представляющих сложную конструкцию. В данном случае простотой аппаратной реализации, высокой помехоустойчивостью, качеством приема и передачи сигналов, обусловленных достаточной для данной задачи дальностью действия и направленными свойствами антенн, обладает способ индуктивной связи [9]. Связь в данном случае осуществляется благодаря взаимоиндуктивности между передающей и приемной антеннами, исполненными в виде катушек с ферромагнитным сердечником, выполненным, например, в виде ферритового стержня. Качество связи значительно повышается ориентацией стержней приемной и передающей антенных индуктивных катушек в одинаковом направлении, и наибольшая чувствительность связи достигается при соосной ориентации стержней катушек.
Работа с устройством (фиг.1) для установки подо льдом рыболовецких снастей осуществляется следующим образом.
Включают с помощью включателя 14 и герметично установленного включателя 9 электропитание соответственно пеленгатора 2 и ПС 1. При этом обеспечивается подача выходного напряжения ИЭЭ 13 в цепь питания приемного устройства 10 и выходного напряжения ИЭЭ 8 в цепи питания ГИ 7 и передающего устройства 5, а также на электродвигатель 4. В первую (стартовую) лунку рыболовом с помощью устройства захвата под воду опускается ПС 1, к корпусу которого закреплена леска. Коренной конец этой лески остается на поверхности льда. Задается нужное направление движения ПС 1, который при помощи гребного винта 3, вращаемого электродвигателем 4, перемещается подо льдом в заданном направлении. При движении ПС 1 непрерывно определяется его местоположение прослушиванием (звуковым индикатором 12) излучаемых им сигналов вторым рыболовом, следующим по льду. Процесс прослушивания осуществляется при одновременном перемещении нижней конечной части трубы пеленгатора с расположенной в ней антенной 11 вблизи поверхности льда, желательно при соблюдении ориентации продольной оси трубы перпендикулярно этой поверхности. В данном случае обеспечивается одинаковая ориентация продольных осей стержней катушек антенн 6, 11. Момент полного совпадения направления осей вдоль одной и той же прямой линии (соосность стержней), характеризуемый наибольшей громкостью звучания звукового индикатора 12, определяет место нахождения ПС 1. При достижении подводным снарядом 1 расстояния, приблизительно равного длине сети, натяжением лески первым рыболовом через первую лунку он останавливается. Впереди его по ходу движения пробивается вторая (финишная) лунка. Далее первым рыболовом отпускается леска на время, необходимое для появления ПС 1 во второй лунке. При появлении ПС 1 в финишной лунке вторым рыболовом он вытаскивается с помощью устройства захвата на поверхность льда вместе с леской, которая оказывается таким образом протянутой между двумя лунками.
При протягивании подо льдом лески на достаточно большое расстояние возможно отклонение движения ПС 1 в сторону от заданного направления. В данном случае осуществляется корректирующее протягивание лески, являющееся продолжением протягивания ее от второй лунки, используемой в данном случае в качестве стартовой, в нужном направлении, с последующим пробиванием третьей (финишной) лунки.
Необходимость автономного электропитания подводного снаряда и пеленгатора вызывает потребность обеспечения малых энергетических затрат при осуществлении индуктивной связи. В данном устройстве снижение потребляемой мощности достигается выбором низкой частоты следования (несколько герц) передаваемых сигналов. Заполнением этих низкочастотных сигналов импульсами более высокой частоты (несколько килогерц) в звуковом диапазоне, то есть формированием низкочастотной передачи пачек импульсов несущей частоты, обеспечиваются высокая помехоустойчивость и качество связи. Выбор несущей частоты в звуковом диапазоне упрощает схему пеленгатора из-за исключения необходимости установки дополнительного преобразователя частоты на входе звукового индикатора. Другим важным достоинством выбора диапазона высокой несущей частоты является возможность обеспечения электрического резонанса в контурах цепей приемной и передающей антенных катушек, повышающего качество индуктивной связи. Вариант формируемых сигналов индуктивной связи, в данном случае являющийся индукцией магнитного поля в форме радиочастотных импульсов, позволяет применение известных средств радиотехники для реализации приемного 10 и передающего 5 устройств.
В комплект устройства (фиг.2) по второму варианту входят подводный снаряд (ПС) 1 с закрепленной к его корпусу леской, пеленгатор 2 и пульт дистанционного управления (ПДУ) 3, причем ПС 1 содержит правый 4 и левый 5 гребные винты (ГВ), подключенные соответственно к правому 6 и левому 7 электродвигателям (ЭД), передающее устройство 8 с передающей антенной 9 и генератор импульсов (ГИ) 10, выход которого подключен ко входу передающего устройства 8, пеленгатор 2 содержит приемное устройство 13 с подключенной к нему приемной антенной 14, звуковой индикатор 11 и источник электроэнергии (ИЭЭ) 12, выход которого через включатель 15 подключен к цепи питания приемного устройства 13, выход которого подключен к ЗИ 11, причем ПДУ 3 содержит свой источник электроэнергии (ИЭЭ) 16, включатель 17, два переменных резистора 18, 20 и два ключа 19, 21, причем выход ИЭЭ 16 подключен ко входу включателя 17, выход которого через первую цепь последовательного соединения первого переменного резистора 18, первого ключа 19 и соответствующего провода проводной линии и через вторую цепь последовательного соединения второго переменного резистора 20, второго ключа 21 и соответствующего провода проводной линии подключен соответственно к правому 6 и левому 7 электродвигателям, а через третий соответствующий провод проводной линии - к цепям питания генератора импульсов 10 и передающего устройства 8 ПС 1. На функциональной схеме фиг.2 в числе проводов длинной передающей четырехпроводной линии связи не показан предполагаемый общий провод. Конструктивно приемная антенна 14 пеленгатора 2 установлена во внутренней нижней части полой (пластмассовой) трубы, причем приемная антенна 14 пеленгатора 2 и передающая антенна 9 ПС 1 изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи между ПС 1 и пеленгатором 2, причем продольная ось стержня катушки антенны 9, закрепленной на ПС 1, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки антенны 14 пеленгатора 2 ориентирована вдоль продольной оси трубы, внутри которой установлена антенна 14.
По второму варианту исполнения предлагаемое устройство ПС 1 является самоходным дистанционно управляемым по проводной связи устройством, используемым для протягивания подо льдом лески между двумя предварительно пробиваемыми лунками. Движение ПС 1 осуществляется с помощью двух, то есть правого 4 и левого 5 гребных винтов, вращаемых соответственно электродвигателями 6, 7. С помощью пеленгатора 2 прослушиванием звуковым индикатором 11 сигналов, излучаемых передающей антенной 9 ПС 1, осуществляется обнаружение и определение его местоположения в процессе перемещения. Формирование передающих сигналов на несущей частоте ГИ 10 осуществляется передающим устройством 8. Приемным устройством 13 пеленгатора 2 с помощью приемной антенны 14 осуществляется прием сигналов ПС 1, усиление их и выдача для прослушивания на ЗИ 11. Процесс прослушивания звуковым индикатором 11, так же как и в устройстве по первому варианту, сопровождается перемещением нижней концевой части трубы с антенной пеленгатора 2 вблизи поверхности льда до момента появления максимального звука воспринимаемого сигнала, свидетельствующего обнаружение и определяющего местонахождение ПС 1. Корректировка возможного отклонения ПС 1 от заданного направления в процессе движения осуществляется внешним дистанционным командоуправлением по проводной связи с помощью ПДУ 3. Для исключения влияния тяжести проводной линии на подводный снаряд при его движении для изготовления проводной линии целесообразно применение тонких проводов, уложенных в общую гибкую изолирующую трубку. При этом также целесообразно снабжение этой линии по ее длине поплавками. Плавучесть проводной линии также можно обеспечить нагнетанием воздуха в изолирующую трубку с последующей герметизацией ее концов.
Работа с устройством (фиг.2) для установки подо льдом рыболовецких снастей осуществляется следующим образом.
Включают с помощью включателей 15, 17 электропитание соответственно пеленгатора 2 и ПДУ 3. При этом обеспечивается подача выходного напряжения ИЭЭ 12 в цепь питания приемного устройства 13 пеленгатора 2 и выходного напряжения ИЭЭ 16 в цепи питания передающего устройства 8 и ГИ 10 подводного снаряда 1. В первую (стартовую) лунку под воду опускается первым рыболовом с помощью устройства захвата подводный снаряд 1, к корпусу которого закреплена леска, коренной конец которой остается на поверхности льда. Кроме того, к ПС 1 закреплены изолированные провода длинной проводной связи, соединяющие ПС 1 и ПДУ 3 в соответствии с показанной схемой фиг.2. Далее первым рыболовом с помощью ключей 19, 21 включаются в работу ЭД 6, ЭД 7 подключением их к выходу ИЭЭ 16 через соответствующие переменные регулировочные резисторы 18, 20 с установленными, например, одинаковыми начальными значениями номиналов. Первым рыболовом с помощью устройства захвата задается нужное направление движения ПС 1, который перемещается подо льдом в направлении на вторую лунку. Второй рыболов, сопровождая по льду ПС 1, с помощью пеленгатора 2 прослушиванием звуковым индикатором 11 звуковых сигналов, излучаемых передающей антенной 9 ПС 1, определяет его местоположение. Эффективность обнаружения прослушиванием сигналов обеспечивается перемещением по поверхности льда концевой части трубы пеленгатора 2 (содержащей приемную антенну 14) до получения наибольшей громкости звука воспринимаемого сигнала. Таким образом, траектория движения второго рыболова обозначает траекторию движения и положение ПС 1. По результатам наблюдения за перемещением второго рыболова первым рыболовом командоуправлением по проводной связи с помощью ПДУ 3 осуществляется управление и корректировка возможного отклонения от заданного направления ПС 1, вызванных, например, неровностью внутренней поверхности льда, неравномерной работой ЭД 6, ЭД 7 и пр. В данном случае реализуются по крайней мере четыре операции управления, осуществляющие поворот вправо, движение прямо, поворот влево и остановку движения. Каждый гребной винт приводится в движение от своего электродвигателя, управляемого внешней командой, обеспечивающей подачу или отключение регулируемых с помощью переменных резисторов 18, 20 выходных токов ИЭЭ 16, задающих скорость движения ПС 1. Для прямолинейного движения вперед включается одновременная работа правого 6 и левого 7 электродвигателей, работающих с одинаковой скоростью, задаваемой подачей одинаковых токов в электродвигатели 6, 7 переменными резисторами 18, 20. Замыканием одного из ключей 19, 21 и размыканием другого осуществляются повороты ПС 1 влево или вправо. При этом дополнительным использованием переменных регулировочных резисторов осуществляется более гибкое управление движением. Так, например, для криволинейного движения скорость ЭД, соответствующая направлению поворота, устанавливается меньшей (например, если поворот осуществляется вправо, скорость правого ЭД 6 устанавливается меньше скорости левого ЭД 7). Манипуляцией ручек резисторов 18, 20 и ключей 19, 21 ПС 1 доставляется во вторую лунку. При появлении ПС 1 во второй финишной лунке он останавливается выключением ЭД 6, 7 при отключении подачи на них токов с помощью ключей 19, 21. Затем вторым рыболовом с помощью устройства захвата осуществляется подъем ПС 1 через эту лунку на поверхность льда вместе с концом лески, которая оказывается таким образом протянутой между двумя лунками.
В комплект устройства по третьему варианту (фиг.3, фиг.4) входят подводный снаряд (ПС) 1 с закрепленной к его корпусу леской 2, устройство захвата 3 и пульт пеленгации и дистанционного управления (ППДУ) 4, причем подводный снаряд 1 включает (фиг.4) правый 5 и левый 6 гребные винты (ГВ), соединенные соответственно с электродвигателями (ЭД) 7, 8, подключенными к первому и второму выходам блока коммутации (БК) 9, вход которого подключен к выходу источника электроэнергии (ИЭЭ) 10, а входы управления подключены соответственно к выходам приемо-передающего устройства (ППУ) 11 с подключенной к нему приемо-передающей антенной 12 и генератор импульсов (ГИ) 13, выход которого подключен ко входу ППУ 11, причем цепи питания БК 9, ППУ 11 и ГИ 13 через герметично установленный включатель 14 подключены к выходу ИЭЭ 10. ППДУ 4 содержит свое приемо-передающее устройство (ППУ) 15 с подключенной к нему приемо-передающей антенной 16, блок формирования команд (БФК) 17, свои генератор импульсов (ГИ) 18 и источник электроэнергии (ИЭЭ) 19, выход которого через включатель 20 подключен к цепям питания генератора импульсов 18, ППУ 15 и блока формирования команд 17, выходы которого подключены к соответствующим входам управления ППУ 15, вход которого подключен к выходу ГИ 18, а выход - к входу звукового индикатора (ЗИ) 21. Конструктивно антенна 16 пульта пеленгации и дистанционного управления 4 установлена во внутренней нижней части полой (пластмассовой) трубы, причем антенны 12, 16 изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи между ПС 1 и ППДУ 4, причем продольная ось стержня катушки антенны 12, закрепленной на ПС 1, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки антенны 16 ППДУ 4 ориентирована вдоль продольной оси трубы, внутри которой установлена катушка антенны 16.
Показанный на фиг.4 ПС 1 является самоходным дистанционно управляемым устройством, используемым для протягивания подо льдом лески 2 между двумя заранее пробитыми во льду лунками а и б (фиг.3) Управление осуществляется командами, задаваемыми в ППДУ 4 в виде сигналов индукции в форме радиочастотных импульсов, формируемых в ППУ 15 и излучаемых антенной 16. При этом команды включаются элементами управления (кнопочными включателями) блока формирования команд 17. Передача сигналов ППДУ 4 осуществляется на несущей частоте, формируемой генератором импульсов 18. Передача с помощью ППДУ 4 оперативных команд управления гребными винтами 5, 6 происходит в режиме передачи сигналов антенной 16 приемо-передающего устройства 15, обеспечиваемого предварительной подачей команды "Передача". Движение ПС 1 осуществляется управлением гребными винтами 5, 6 путем подачи на них или отключения от их входа выходного напряжения ИЭЭ 10 блоком коммутации 9, который в свою очередь управляется выходными сигналами ППУ 11, формируемыми в нем управляющими командами, принимаемыми с помощью антенны 12. Прослушиванием звуковым индикатором 21 сигналов, излучаемых антенной 12, осуществляется обнаружение ПС 1 и определение его местоположения. В данном случае ППУ 15 работает в режиме приема сигналов, осуществляя их прием с помощью антенны 16, затем усиление и выдачу на вход ЗИ 21. ППУ 11 в этом режиме обеспечивает формирование и передачу периодически повторяемых сигналов на несущей частоте генератора импульсов 13. Режим передачи сигналов ПС 1 и их прием ППДУ 4 задаются командой "Прием", формируемой с помощью БФК 17.
Выбор и реализация схем ППУ 11 и ППУ 15 определяется выбором способов формирования и кодирования команд и формирования передаваемых сигналов. Приемлемый для данного случая вариант реализации подобных схем показан, например, в описании радиоуправляемой модели, представленной в [8].
В данном варианте управления командный сигнал состоит из серии кратковременных импульсно-модулированных сигналов (пачек импульсов) в форме радиочастотных импульсов, число которых, например, определяет номер включаемой команды. Распознавание команды в приемо-передающих устройствах 11, 15 осуществляется автоматически, подсчетом необходимого числа низкочастотных импульсов в командном сигнале при нажатии соответствующей кнопки БФК 17. В устройстве в режиме передачи обеспечивается включение любой оперативной команды выборочно в любой последовательности. Команды, принимаемые в ППУ 11, включаются от нажатия соответствующих кнопок управления в БФК 17, а при отпускании остаются включенными (команды с памятью). Выключение такой команды происходит при нажатии кнопки включения следующей выполняемой команды.
Работа с устройством для установки подо льдом рыболовецких снастей осуществляется следующим образом.
Включают с помощью включателей 14, 20 электропитание соответственно ПС 1 и ППДУ 4. При этом обеспечивается подача входного напряжения ИЭЭ 10 в цепи питания БК 9, ППУ 11 и ГИ 13 и выходного напряжения ИЭЭ 19 в цепи питания ППУ 15, БФК 17 и ГИ 18. С помощью управляющего элемента - кнопочного включателя г (фиг.3) БФК 17, расположенного на ППДУ 4, устанавливают команду «Передача». В данном случае в ППУ 15 формируются импульсы этой команды, излучаемые антенной 1 6 на несущей частоте выходных импульсов ГИ 18. Приемом с помощью антенны 12 заданной команды ППУ 11 устанавливается в режим приема команд. При этом отсутствует передача сигналов приемо-передающей антенной 12 и, следовательно, отсутствуют звуковые сигналы в ЗИ 21.
Установкой с помощью БФК 17 команды "Стоп" в ППУ 11 с момента ее приема с помощью антенны 12 осуществляется запоминание ее в ППУ 11 до прихода следующей команды и формирование управляющих сигналов в ППУ 11, подаваемых на входы управления блока коммутации 9, отключающего в данном случае подачу выходного напряжения ИЭЭ 10 на ЭД 7, ЭД 8, тем самым отключая работу гребных винтов 5, 6.
Устанавливают с помощью устройства захвата 3 ПС 1 (с закрепленной к его корпусу леской 2) через первую лунку а (фиг.3) в воду под лед. Ориентируют ПС 1 в нужном направлении движения на вторую лунку б. Включают с помощью БФК 17 команду "Прямо". В ППУ 11 с момента ее приема и запоминания формируются управляющие сигналы, подаваемые на входы управления БК 9, обеспечивающие подачу выходного напряжения ИЭЭ 10 на ЭД 7, ЭД 8, тем самым включая работу обоих гребных винтов 5, 6. Затем устанавливают команду задания режимов работы в состояние "Прием". Данной командой ППУ 11 переходит в режим передачи сигналов на несущей частоте импульсов, подаваемых с выхода ГИ 13 на вход ППУ 11. В этом режиме в ППУ 11 осуществляются хранение управляющей команды, в данном случае-команды "Движение прямо", а также формирование и передача с помощью антенны 12 сигналов. В ППДУ 4 с помощью антенны 16 и ППУ 15 осуществляются прием этих сигналов и подача их на вход ЗИ 21. Прослушиванием их с помощью ЗИ 21 убеждаются в готовности ППДУ 4 и ПС 1 к работе.
При ослаблении лески 2 ПС 1 отстыковывается от устройства захвата 3 и начинает движение подо льдом в прямом направлении, увлекая за собой леску, которая сматывается с барабана установленной вблизи первой лунки а лебедки в (фиг.3). Перемещение ПС 1 осуществляется управлением, осуществляемым рыболовом, сопровождающим по льду ПС 1. Управление обеспечивается предварительным прослушиванием с помощью ЗИ 21 излучаемых антенной 12 подводного снаряда 1 сигналов, определяющих его местоположение. Прослушивание сигналов звуковым индикатором 21, так же как и в устройстве по первому и второму вариантам осуществляется перемещением рыболовом вблизи поверхности льда нижней конечной части трубы пульта пеленгации и дистанционного управления 4 с расположенной в ней приемо-передающей антенной 16 до получения наибольшей громкости звука воспринимаемого сигнала. Одинаковая направленность осей стержней катушек антенн 12, 16 является условием обеспечения возможности прослушивания и командоуправления, а достижение соосности расположения осей при перемещении антенны 16 является также свидетельством определения местонахождения ПС 1. Практически достижимая точность определения местоположения ПС 1 данным способом находится в пределах ±10 см, что и определяет вполне достаточную эффективность дистанционного управления. При возможных отклонениях направления движения ПС 1, вызванных, например, неровностью внутренней поверхности льда, неравномерной работой ЭД 7, ЭД 8 и пр., осуществляется корректировка его движения командами ППДУ 4. Формирование оперативных команд управления гребными винтами 5,6 осуществляется в режиме передачи сигналов данным устройством, то есть передача оперативных команд сопровождается предварительным формированием команды "Передача" блоком формирования команд 17. В данном случае используются по крайней мере четыре оперативные команды: "Поворот вправо", "Движение прямо", "Поворот влево" и "Стоп". Прием оперативных команд в ПС 1 сопровождается последующим их запоминанием и формированием управляющих сигналов в ППУ 11, обеспечивающих управление через блок коммутации 9 электродвигателями 7, 8 гребных винтов 5, 6. В данном случае каждый гребной винт приводится в движение от своего электродвигателя, управляемого соответствующей командой, обеспечивающей подачу или отключение выходного напряжения ИЭЭ 10 с помощью управляемого блока коммутации 9. Для прямолинейного движения вперед включается одновременная работа правого 7 и левого 8 электродвигателей, работающих с одинаковой скоростью одновременной подачей блоком коммутации 9 выходного напряжения ИЭЭ 10 на оба электродвигателя. Для криволинейного движения ПС 1 электродвигатель, соответствующий направлению поворота, выключается. Например, если поворот осуществляется вправо, правый электродвигатель выключается и, наоборот, при осуществлении поворота влево выключается левый электродвигатель. При этом выключение электродвигателей осуществляется отключением подачи выходного напряжения ИЭЭ 10 на выключаемый электродвигатель. В данном случае, другой вариант реализации криволинейного движения также осуществим изменением полярности подключения к ИЭЭ 10 электродвигателя, соответствующего направлению поворота. Сигналы управления коммутацией напряжения для правого и левого электродвигателей подаются соответственно с первого и второго выходов ППУ 11 на первый и второй входы блока коммутации 9.
При появлении ПС 1 во второй финишной лунке б осуществляется его остановка выключением электродвигателей 7,8 подачей команды "Стоп" с ППДУ 4 в режиме передачи команд ППУ 15. Затем устройством захвата 3, предварительно установленным во вторую лунку б, осуществляется захват подводного снаряда 1 и подъем его через эту лунку на поверхность льда вместе с концом лески 2, которая оказывается таким образом протянутой между двумя лунками. Затем с помощью включателей 14, 20 осуществляется выключение автономного питания ПС 1 и ППДУ 4.
Очевидной преимущественной особенностью устройства по первому варианту является простота реализации, требующая меньших аппаратных затрат. Преимуществом способа и устройства для его осуществления по второму варианту по сравнению с первым является возможность гибкого управления движением подводного снаряда, дополнительно сокращающего время протягивания фала подо льдом и исключающего необходимость осуществления корректирующего этапа перемещения подводного снаряда. Дополнительным достоинством этого варианта является также отсутствие на подводном снаряде источника электроэнергии, исключающее необходимость его периодической зарядки или замены, требующих периодической разгерметизации подводного снаряда. Способ и устройство по третьему варианту отличаются сочетанием гибкости и удобства управления движением подводного снаряда. Причем управление подводным снарядом и его сопровождение осуществляются одним и тем же рыболовом.
Таким образом, простота осуществления операций протягивания лески и достаточно высокая скорость подводного снаряда обеспечивают малое время, затрачиваемое на установку рыболовецких снастей подо дьдом. Простота конструктивного исполнения устройства и простота его эксплуатации по сравнению с прототипом снижают материальные затраты, обеспечивая широкие возможности применения предлагаемых способа и устройства не только в больших, но и в малых и отдаленных хозяйствах. Следовательно, предлагаемое изобретение обладает полезностью, реализуемостью и новизной.
Литература
1. Большая советская энциклопедия (БСЭ), т.33, 1935 г., с.415.
2. Войниканис-Мирский В.Н. Техника промышленного рыболовства и промысел морского зверя. - М.: Пищепромиздат, 1961.
3. Торбан С.С. Механизация рыболовства во внутренних водоемах. М.: Пищевая промышленность, 1969, с.206-207.
4. Патент РФ №2153254, МПК 7 А01К 79/00, 1999, "Устройство для протягивания линя подо льдом".
5. Патент РФ №2020811, МПК 5 А01К 87/00, 1991, "Устройство для ловли рыбы".
6. Патент РФ №2066098, МПК 6 А01К 79/00, 1994, "Способ установки подо льдом реки поперек течения рыболовецких снастей".
7. Диомидов М.И., Дмитриев А.И. "Подводные аппараты". Л.: Судостроение, 1966.
8. В помощь радиолюбителю. Сборник. Вып.94/В80-М.: ДОСААФ, 1986. с.46-57.
9. Войцеховский. "Радиоэлектронные игрушки", М.: Советское радио, 1976, с.187-189, 231, 545-547.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования глазного дна по степени его кровоснабжения | 1989 |
|
SU1683669A1 |
| СИСТЕМА ПОДВОДНОЙ СЕЙСМОРАЗВЕДКИ НА МОРЕ | 2020 |
|
RU2755001C1 |
| ПОДВОДНЫЙ ТРАСПОРТНЫЙ КОМПЛЕКС | 2007 |
|
RU2356779C2 |
| АВИАЦИОННАЯ БОМБА | 2007 |
|
RU2347178C1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДА С ПОДВОДНОГО НОСИТЕЛЯ | 2012 |
|
RU2510608C1 |
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| РЕТРАНСЛЯТОР И КОНВЕРТЕР РАДИОСИГНАЛОВ | 2018 |
|
RU2701507C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
Изобретение относится к промышленному рыболовству, в частности к техническим средствам для подледного лова рыбы. Способ включает пробивание во льду двух лунок на расстоянии, приблизительно равном длине сети, в первую - стартовую лунку под лед в воду опускается рыболовом с помощью устройства захвата самоходный подводный снаряд, к корпусу которого закреплен затравочный фал-леска. Коренной конец этого фала остается на поверхности льда. Задается нужное направление движения подводного снаряда, который при помощи своего двигательно-движительного устройства перемещается подо льдом в заданном направлении установки сети. Пробивание второй - финишной лунки осуществляется в конце процесса перемещения подводного снаряда. При движении подводного снаряда непрерывно определяется его местоположение прослушиванием с помощью приемного устройства излучаемых им сигналов вторым рыболовом, следующим за ним по льду. При достижении подводным снарядом расстояния, приблизительно равного длине сети, натяжением лески первым рыболовом через первую лунку он останавливается и впереди его по ходу движения пробивается вторая лунка. Далее первым рыболовом отпускается леска до появления подводного снаряда во второй лунке и при появлении его во второй лунке вторым рыболовом он вытаскивается с помощью устройства захвата на поверхность льда вместе с леской, которая оказывается таким образом протянута между двумя лунками. При сопровождении подводного снаряда обнаружение сигналов осуществляется на основе использования индуктивной связи приемного устройства второго рыболова и передающего устройства подводного снаряда. В комплект устройства входят устройство захвата подводного снаряда и сам подводный снаряд с закрепленной к его корпусу леской, включающий гребной винт с подключенным к нему электродвигателем, герметично установленный включатель и источник электроэнергии, выход которого подключен к выводу включателя. В комплект устройства дополнительно введен пеленгатор, содержащий приемное устройство с подключенной к нему приемной антенной, звуковой индикатор и источник электроэнергии, выход которого через включатель подключен к цепи питания приемного устройства, выход которого подключен к звуковому индикатору. Подводный снаряд дополнительно содержит передающее устройство с подключенной к нему передающей антенной и генератор импульсов, выход которого подключен ко входу передающего устройства, электродвигатель, цепи питания передающего устройства и генератор импульсов подключены ко второму выводу включателя. Обеспечиваются упрощение способа и его реализации при достаточно малом времени протягивания лески от лунки к лунке, а также снижение стоимости изготовления и эксплуатации устройства для его осуществления. 6 н. и 6 з.п. ф-лы, 4 ил.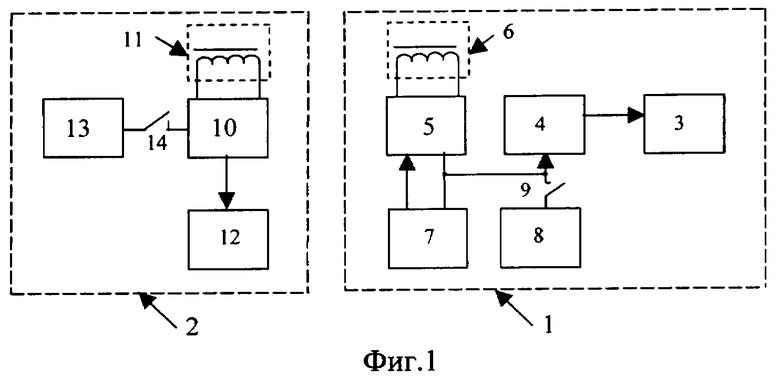
1. Способ для установки подо льдом рыболовецких снастей протягиванием затравочного фала, включающий пробивание во льду двух лунок на расстоянии, приблизительно равном длине сети, в первую - стартовую лунку под лед в воду опускается рыболовом с помощью устройства захвата самоходный подводный снаряд, к корпусу которого закреплен затравочный фал-леска, коренной конец этого фала остается на поверхности льда, задается нужное направление движения подводного снаряда, который при помощи своего двигательно-движительного устройства перемещается подо льдом в заданном направлении установки сети, отличающийся тем, что пробивание второй - финишной лунки осуществляется в конце процесса перемещения подводного снаряда, при этом при движении подводного снаряда непрерывно определяется его местоположение прослушиванием - приемным устройством излучаемых им сигналов вторым рыболовом, следующим за ним по льду, при достижении подводным снарядом расстояния, приблизительно равного длине сети, натяжением лески первым рыболовом через первую лунку он останавливается и впереди его по ходу движения пробивается вторая лунка, далее первым рыболовом отпускается леска до появления подводного снаряда во второй лунке и при появлении его во второй лунке вторым рыболовом он вытаскивается с помощью устройства захвата на поверхность льда вместе с леской, которая оказывается, таким образом, протянута между двумя лунками, при сопровождении подводного снаряда обнаружение сигналов осуществляется на основе использования индуктивной связи приемного устройства второго рыболова и передающего устройства подводного снаряда.
2. Способ для установки подо льдом рыболовецких снастей протягиванием затравочного фала, включающий пробивание во льду двух лунок на расстоянии, приблизительно равном длине сети, в первую - стартовую лунку под лед в воду опускается рыболовом с помощью устройства захвата самоходный подводный снаряд, к корпусу которого закреплен затравочный фал-леска, коренной конец которого остается на поверхности льда, задается нужное направление движения подводного снаряда, который при помощи своего двигательно-движительного устройства перемещается подо льдом в направлении на вторую лунку и при появлении в ней, вытаскивается с помощью устройства захвата на поверхность льда вместе с леской, которая оказывается, таким образом, протянута между двумя лунками, отличающийся тем, что направление движения и корректировка возможного отклонения от заданного направления перемещения подводного снаряда осуществляются внешним дистанционным командоуправлением по проводной связи - связи пульта управления первого рыболова и подводного снаряда через первую лунку первым рыболовом по наблюдаемому им движению второго рыболова, сопровождающего по льду подводный снаряд, своим движением обозначая его местоположение - траекторию движения, определяемое прослушиванием им с помощью приемного устройства излучаемых подводным снарядом сигналов, обнаружение сигналов осуществляется на основе использования индуктивной связи приемного устройства второго рыболова и передающего устройства подводного снаряда.
3. Способ для установки подо льдом рыболовецких снастей протягиванием затравочного фала, включающий пробивание во льду двух лунок на расстоянии, приблизительно равном длине сети, в первую - стартовую лунку под лед в воду опускается рыболовом с помощью устройства захвата самоходный подводный снаряд, к корпусу которого закреплен затравочный фал-леска, коренной конец которого остается на поверхности льда, задается нужное направление движения подводного снаряда, который при помощи своего двигательно-движительного устройства перемещается подо льдом в направлении на вторую лунку и при появлении в ней поднимается с помощью устройства захвата на поверхность льда вместе с леской, которая оказывается, таким образом, протянута между двумя лунками, отличающийся тем, что направление и корректировка возможного отклонения от заданного направления перемещения подводного снаряда осуществляются внешним дистанционным беспроводным командоуправлением по принимаемым сигналам, излучаемым подводным снарядом, определяющих его местоположение и направление движения, обнаружение сигналов и командоуправление осуществляются на основе использования индуктивной связи приемопередающих устройств подводного снаряда и рыболова, сопровождающего подводный снаряд по льду и производящего прослушивание сигналов и управление движением подводного снаряда.
4. Устройство для установки подо льдом рыболовецких снастей, в комплект которого входят устройство захвата подводного снаряда и сам подводный снаряд с закрепленной к его корпусу леской, включающий гребной винт с подключенным к нему электродвигателем, герметично установленный включатель и источник электроэнергии, выход которого подключен к выводу включателя, отличающееся тем, что в комплект устройства дополнительно введен пеленгатор, содержащий приемное устройство с подключенной к нему приемной антенной, звуковой индикатор и источник электроэнергии, выход которого через включатель подключен к цепи питания приемного устройства, выход которого подключен к звуковому индикатору, причем подводный снаряд дополнительно содержит передающее устройство с подключенной к нему передающей антенной и генератор импульсов, выход которого подключен ко входу передающего устройства, электродвигатель и цепи питания передающего устройства и генератор импульсов подключены ко второму выводу включателя.
5. Устройство по п.4, отличающееся тем, что конструктивно антенна пеленгатора установлена во внутренней нижней части полой пластмассовой трубы.
6. Устройство по п.4, отличающееся тем, что антенны пеленгатора и подводного снаряда изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи, причем продольная ось стержня катушки, закрепленной на подводном снаряде, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки пеленгатора ориентирована вдоль продольной оси трубы, внутри которой установлена катушка.
7. Устройство для установки подо льдом рыболовецких снастей, в комплект которого входят устройство захвата подводного снаряда и сам подводный снаряд с закрепленной к его корпусу леской, содержащий правый и левый гребные винты, подключенные соответственно к правому и левому электродвигателям, отличающееся тем, что в комплект устройства дополнительно введены пульт дистанционного управления и пеленгатор, содержащий приемное устройство с подключенной к нему приемной антенной, звуковой индикатор и источник электроэнергии, выход которого через включатель подключен к цепи питания приемного устройства, выход которого подключен к звуковому индикатору, подводный снаряд дополнительно содержит передающее устройство с подключенной к нему передающей антенной и генератор импульсов, выход которого подключен ко входу передающего устройства, пульт дистанционного управления содержит свой источник электроэнергии, включатель, два переменных резистора и два ключа, причем выход источника электроэнергии подключен ко входу включателя, выход которого через первую цепь последовательного соединения первого переменного резистора, первого ключа и первого провода проводной линии и через вторую цепь последовательного соединения второго переменного резистора, второго ключа и второго провода проводной линии подключен соответственно к правому и левому электродвигателям, а через третий провод проводной линии - к цепям питания генератора импульсов и передающего устройства подводного снаряда.
8. Устройство по п.7, отличающееся тем, что конструктивно антенна пеленгатора установлена во внутренней нижней части полой пластмассовой трубы.
9. Устройство по п.7, отличающееся тем, что антенны пеленгатора и подводного снаряда изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи, причем продольная ось стержня катушки, закрепленной на каждом подводном снаряде, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки пеленгатора ориентирована вдоль продольной оси трубы, внутри которой установлена катушка.
10. Устройство для установки подо льдом рыболовецких снастей, в комплект которого входят устройство для захвата подводного снаряда и сам подводный снаряд, включающий правый и левый гребные винты, подключенные соответственно к правому и левому электродвигателям, включатель, источник электроэнергии и блок коммутации, первый и второй выходы которого подключены соответственно к правому и левому электродвигателям, а вход - к выходу источника электроэнергии, подключенного через включатель к цепи питания блока коммутации, отличающееся тем, что в комплект устройства дополнительно введен пульт пеленгации и дистанционного управления, содержащий приемопередающее устройство с подключенной к нему приемопередающей антенной, звуковой индикатор, генератор импульсов, выход которого подключен ко входу приемопередающего устройства, блок формирования команд и источник электроэнергии, выход которого через включатель подключен к цепям питания генератора импульсов, блока формирования команд и приемопередающего устройства, выход которого подключен к звуковому индикатору, а входы управления - соответственно к выходам блока формирования команд, причем подводный снаряд дополнительно содержит свое приемопередающее устройство с подключенной к нему приемопередающей антенной и генератор импульсов, выход которого подключен ко входу приемопередающего устройства, первый и второй выходы которого подключены соответственно к первому и второму входам управления блока коммутации, причем цепи питания приемопередающего устройства и генератора импульсов подключены к цепи питания блока коммутации.
11. Устройство по п.10, отличающееся тем, что конструктивно антенна пульта пеленгации и дистанционного управления установлена во внутренней нижней части полой пластмассовой трубы.
12. Устройство по п.10, отличающееся тем, что антенны пульта пеленгации и дистанционного управления и подводного снаряда изготовлены в виде катушек с ферромагнитным стержнем, обеспечивающих осуществление индуктивной беспроводной связи, причем продольная ось стержня катушки, закрепленной на подводном снаряде, направлена перпендикулярно его горизонтально ориентированной плоскости в рабочем положении, а продольная ось стержня катушки антенны пульта пеленгации и дистанционного управления ориентирована вдоль продольной оси трубы, внутри которой установлена катушка.
| RU 2066098 С1, 10.09.1996 | |||
| УСТРОЙСТВО ДЛЯ ЛОВЛИ РЫБЫ | 1991 |
|
RU2020811C1 |
| US 4339888 А, 20.07.1982 | |||
| US 4856222 А, 15.08.1989 | |||
| УСТРОЙСТВО ДЛЯ ПРОТЯГИВАНИЯ ЛИНЯ ПОДО ЛЬДОМ | 1999 |
|
RU2153254C1 |

