Изобретение относится к контрольно-измерительной технике и может быть использовано для определения места течи в подземных трубопроводах систем тепло- и водоснабжения, а преимущественно в магистральных трубопроводах, уложенных на дне водоемов, включая морские акватории.
Известны устройства для определения места течи в подземных трубопроводах [авторские свидетельства SU №№336463, 380910, 411268, 1368685, 1657988, 1778597, 1781577, 1800219; патенты RU №№2011110, 2026372, 2047039, 2047815, 2053436, 2084757, 2010227, 2121105; патенты US №№3045116, 3744298, 4289019; патенты GB №№1349120, 2311135; патенты FR №№2374628, 2504651; патент DE №3112829; патент JP №4611795; Волошин В.И. и др. Акустический определитель местоположения развивающегося дефекта // Дефектоскопия, 1980, 8. - С.69-74], которые характеризуется тем, что содержат первичные вибропреобразователи, устанавливаемые на концах обслуживающего трубопровода, два усилителя, два фильтра, два аналого-цифровых преобразователя, шифратор, дешифратор, цифровой коррелятор и дисплей. В некоторых известных устройствах дополнительно введен передатчик и приемник. Применение радиоканала позволяет повысить мобильность устройства, расширить его функциональные возможности.
Однако устройствам, представляющим собой аналоги, присущ недостаток, заключающийся в том, что радиоканал подвержен сильному воздействию естественных и искусственных помех, особенно в условиях крупного мегаполиса, что делает возможным его работоспособность только на секциях трубопроводов малой длины.
Известно устройство поиска мест утечек магистральных трубопроводов [патент RU №2196312], в котором технической задачей является повышение надежности радиоканала путем использования сложных сигналов с фазовой манипуляцией.
В известном устройстве [патент RU №2196312] поставленная задача решается тем, что устройство для поиска мест утечек магистральных трубопроводов, содержащее первый и второй датчики вибрации, устанавливаемые на концах диагностируемой секции трубопровода, приемник, последовательно подключенные к выходу первого датчика вибрации первый усилитель, первый фильтр, первый аналого-цифровой преобразователь, цифровой коррелятор, второй вход которого соединен с выходом дешифратора, и дисплей, последовательно подключенные к выходу второго датчика вибрации второй усилитель, второй фильтр, второй аналого-цифровой преобразователь, шифратор и передатчик, снабжено удвоителем фазы, двумя измерителями ширины спектра, блоком сравнения, пороговым блоком, ключом, двумя перемножителями, узкополосным фильтром и фильтром нижних частот, причем передатчик выполнен в виде последовательно включенных генератора высокой частоты, фазового манипулятора, второй вход которого соединен с выходом шифратора, и усилителя мощности, к выходу приемника последовательно подключены удвоитель фазы, первый измеритель ширины спектра, блок сравнения, второй вход которого через второй измеритель ширины спектра соединен с выходом приемника, пороговый блок, ключ, второй вход которого соединен с выходом приемника, первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом ключа, и фильтр нижних частот, выход которого соединен с выходом дешифратора.
Известное устройство [патент RU №2196312], в отличие от аналогов, ввиду того, что используются сложные сигналы с фазовой манипуляцией, позволяет повысить надежность радиоканала для передачи зарегистрированных сигналов на диспетчерский пункт.
Однако для получения информации о дефектах в трубопроводах используются справочные материалы (толщины стенок трубопровода и т.д.), а вычисление расстояния до места течи от датчика вибрации определяется по времени на основе измеренного значения разности времен (Т), прихода ударных волн от течи до датчиков, с учетом скорости распространения ударной волны осуществляется на основании параметров, введенных в ручную в цифровой коррелятор-процессор, в котором автоматически вычисляется расстояние L до места течи от датчика вибрации, которое отображается на дисплее. При этом выделение рабочей полосы частоты осуществляется посредством фильтров на основании оптимального значения, которое определяются параметрами трубопровода и «помеховой» обстановкой. И если параметры трубопровода могут быть установлены по технической документации, то «помеховая» обстановка является субъективным параметром и посредством известного устройства не может быть учтена, что существенно уменьшает достоинство известного устройства, заключающегося в использовании в устройстве [патент RU №2196312] корреляционного метода для нахождения течи в трубах независимо от глубины их прокладки, вида грунта, интенсивности шума окружающей среды и обеспечении высокой производительности поиска течей на протяженных участках диагностируемого трубопровода, в сравнении с известными устройствами от акустических течеискателей.
Однако выделение информации с фазовым детектированием сигналов представляет по своей сути перемножитель сигналов и фильтр низких частот, что приводит к основным дестабилизирующим факторам, основными из которых являются мгновенные флюктуации фазы приходящей волны и фазовая нестабильность в радиотехнических трактах приемника.
Кроме того, анализ мирового опыта создания морских трубопроводных систем, особенностей региона Балтийского и Северного морей, а также имеющихся исходных данных по морским участкам североевропейского газопровода показывает, что потенциальные опасности для возникновения аварий и отказов трубопровода обусловлены в основном тремя группами причин:
I группа - процессами в геологической среде, экстремальными гидрометеорологическими условиями и природно-климатическими факторами;
II группа - экономической и/или оборонной деятельностью на море и опасностями техногенного происхождения;
III группа - нештатными технологическими режимами, а также естественными процессами, развивающимися с течением времени.
Особую опасность представляют процессы и явления в геологической среде, а именно: экзогенные геологические процессы, гравитационное перемещение донного материала, изменение несущей способности грунта, сейсмичность морского дна и береговых зон, эндогенная геодинамика.
Проявлениями экзогенных (поверхностных) геологических процессов являются: размыв берега, ледовая абразия, абразионно-аккумулятивные процессы, связанные с волнением на открытых акваториях и придонными течениями.
Максимальная скорость дрейфа льда может составить 32-40 см/с. Наибольшие скорости придонных течений и связанные с ними литодинамические эффекты могут наблюдаться вблизи берега на глубинах до 15-20 м и достигать 180-220 см/с.
Возможным проявлением экзогенной геодинамики в пределах проектируемой трассы следует считать различного рода гравитационные перемещения донного материала в виде небольших оползней, просадок, связанных со склонами впадин в различных районах моря, когда угол наклона достигает 2-3 и более градусов на расстоянии нескольких сотен метров.
К числу опасностей природно-техногенного происхождения, формирующихся в поверхностной геологической среде, также относится динамическая деформация поверхностного слоя дна под воздействием вибрации лежащего на морском дне трубопровода.
Основная угроза эндогенной геодинамики связана с перемещением блоков земной коры и ее разуплотнением. Неравенство в скоростях движения, а тем более направленности этого движения для отдельных массивов (блоков земной коры), даже при минимальных скоростях неизбежно приводит в движение весь комплекс рыхлых покровных образований.
Экспериментально подтвержденные скорости таких перемещений составляют несколько миллиметров в год и более. Суммарное перемещение морского дна, возможное за весь эксплуатационный период газопровода, может составить заметную величину и создать определенную угрозу безопасности, особенно на участках перегиба и сочленения газопровода, а также выхода его на берег.
Можно сказать, что сейсмичность морского дна и береговых зон выступает в роли интегрального показателя и индикатора современной эндогенной геодинамики.
Инструментальная оценка сейсмичности затруднена, так как в настоящее время в этих зонах на территории РФ сейсмические станции наблюдения отсутствуют.
В то же время большое количество наблюдательных пунктов на территории Финляндии указывает на периодическое, хотя и незначительное, колебание показателей сейсмической активности в пределах склона Балтийского Кристаллического щита. К числу действующих практически постоянно факторов сейсмической опасности относятся микросейсмические процессы и явления, обуславливающие медленное накопление усталостных деформаций элементов сооружений и конструкций.
Экстремальные гидрометеорологические и природно-климатические условия обуславливают целый ряд факторов (ледяной покров, абразия береговой зоны, литодинамические процессы, поверхностное волнение, течения, штормы, изменения уровня моря, ветер, температура воздуха и морской воды, рост морских отложений и т.д.), приводящих к повышенным нагрузкам и нештатным эксплуатационным режимам газопровода.
Перечисленные выше воздействия, а также причины техногенного происхождения могут привести к планово-высотным перемещениям газопровода и увеличению статических и динамических нагрузок, и, как следствие, накоплению усталостных напряжений, увеличению вибрационных нагрузок, возникновению свободных пролетов, заглублению отдельных участков в связи с изменением несущей способности грунта, что в итоге может привести к повреждению элементов конструкции газопровода вплоть до полного их разрушения.
Кроме того, нестабильность (смещение) грунта, внешние повреждения, напряжения в газопроводе влияют на восприимчивость последнего к появлению стресс-коррозионного растрескивания (Stress Corrosion Cracking (SCC)), основными причинами которого является воздействие окружающей среды (почвы, температуры, водного окружения, бактериальной активности) и действующих операционных нагрузок (прежде всего высокого циклического давления, например для североевропейского газопровода оно составляет - 25 МПа). Трещины SCC располагаются в колониях, содержащих сотни или тысячи индивидуальных трещин, которые со временем могут объединиться и вызвать утечку или разрыв трубы.
Указанные выше отличительные особенности североевропейского газопровода, а также протяженность трассы на морских участках (около 1200 км), отсутствие шлюзовых камер по трассе обуславливают необходимость постановки и решения задач комплексной системы мониторинга технического состояния морских участков, в частности североевропейского газопровода, определяют выбор технических средств их решения, а также режимов использования этих средств и повышения достоверности регистрируемых сигналов, в обеспечение эксплуатационной безопасности морских трубопроводов.
Задачей предлагаемого технического решения является повышение достоверности определения мест утечек транспортируемого продукта из магистральных трубопроводов, включая магистральные трубопроводы для транспортировки углеводородов, уложенных на дне водоемов.
Поставленная цель достигается за счет того, что в устройстве поиска мест утечек магистральных трубопроводов, содержащем акустические датчики, устанавливаемые на поверхности магистрального трубопровода, приемник, усилители, фильтры, аналого-цифровой преобразователи, дисплей, узкополосный фильтр и фильтр нижних частот, причем передатчик содержит усилители мощности, радиоканала передачи зарегистрированных акустических сигналов посредством акустических датчиков, в отличие от известных устройств (аналогов и прототипа), акустические датчики выполнены в виде набора полых цилиндрических пьезоэлементов с акустическим мягким экраном, с размером активной поверхности 300×152 мм, внутри трубопровода размещен внутритрубный измерительный модуль, также снабженный акустическими датчиками, которые выполнены в виде параметрического преобразователя, состоящего из микропроцессора, формирователя сигналов накачки, параметрического излучающего тракта, приемного тракта, при этом излучающий тракт содержит формирователь сигналов накачки и многоэлементную мозаичную антенну, приемный тракт включает антенну, выполненную в виде решетки пьезокерамических n-приемников звука цилиндрической формы, каждый из которых имеет индивидуальную герметизацию, и закрепленных на плите, снабженной акустическим экраном, n-приемников, расположенных рядом, которые смещены относительно друг друга в вертикальной и горизонтальной плоскостях, корпус антенны закрыт звукопрозрачной мембраной, измерительный модуль установлен на дистанционном снаряде соединены гидроакустическим каналом связи с радиоканалом передачи зарегистрированных акустических сигналов, при этом внутритрубный измерительный модуль выполнен в форме снаряда, снабженного бесплатформенной инерциальной навигационной системой с магниторезистивным магнитометром и системой управления и стабилизации, соединенной гидроакустическим каналом связи с радиоканалом передачи акустических сигналов.
Новые отличительные признаки, заключающиеся в том, что акустические датчики выполнены в виде набора полых цилиндрических пьезоэлементов с акустическим мягким экраном, с размером активной поверхности 300×152 мм, внутри трубопровода размещен внутритрубный измерительный модуль, также снабженный акустическими датчиками, которые выполнены в виде параметрического преобразователя, состоящего из микропроцессора, формирователя сигналов накачки, параметрического излучающего тракта, приемного тракта, при этом излучающий тракт содержит формирователь сигналов накачки и многоэлементную мозаичную антенну, приемный тракт включает антенну, выполненную в виде решетки пьезокерамических n-приемников звука цилиндрической формы, каждый из которых имеет индивидуальную герметизацию и закрепленных на плите, снабженной акустическим экраном, n-приемников, расположенных рядом, которые смещены относительно друг друга в вертикальной и горизонтальной плоскостях, корпус антенны закрыт звукопрозрачной мембраной, измерительный модуль установлен на дистанционном снаряде, соединены гидроакустическим каналом связи с радиоканалом передачи зарегистрированных акустических сигналов, при этом внутритрубный измерительный модуль выполнен в форме снаряда, снабженного бесплатформенной инерциальной навигационной системой с магниторезистивным магнитометром и системой управления и стабилизации, соединенной гидроакустическим каналом связи с радиоканалом передачи акустических сигналов, из известного уровня техники не выявлены, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «изобретательский уровень».
Сущность предлагаемого технического решения заключается в следующем.
На поверхности трубопровода устанавливают акустические датчики, выполненные в виде набора полых цилиндрических пьезоэлементов с акустическим мягким экраном, с размером активной поверхности 300×152 мм, имеющих следующие параметры: высота - 12 мм, диаметр - 15 мм, толщина - 1 мм. В качестве активного материала преобразователя применен сплав с высоким значением параметра приема акустических сигналов типа ЦТС-19М. Расчет чувствительности для отдельного элемента приемного датчика дает значение 85 мкВ/Па.
Ввиду того, что непосредственный акустический контакт активных элементов приемного датчика с нагружающей средой (водная толща) и элементами конструкции трубопровода может привести к их демпфированию и уменьшению чувствительности датчика, то для минимизации демпфирующего действия указанных факторов применен датчик в виде полых цилиндров с акустически мягким экраном. В качестве акустического экрана возможно применение полиуретановых пенопластов, обладающих достаточно высокой механической жесткостью, которая позволяет избежать недопустимых деформаций приемного датчика на рабочих глубинах. В то же время удельный акустический импеданс полиуретановых пенопластов z=300-400 кг/(м2с) значительно меньше его характерных значений у пьезокерамических материалов z=3·107 кг/(м2с), что позволяет считать акустический экран, выполненный из таких материалов, близкими к идеальным.
Применение акустического экрана в конструкции приемного датчика позволяет избавиться от нежелательного тыльного лепестка в ее диаграмме направленности. Приемник, усилители, фильтры, аналого-цифровые преобразователи, дисплей, узкополосный фильтр и фильтр нижних частот, причем передатчик содержит усилители мощности, радиоканал передачи зарегистрированных акустических сигналов аналогичны устройствам прототипа. Ввиду того, что предлагаемое техническое решение может быть использовано для обеспечения функционирования подводных трубопроводов, то радиоканал передачи зарегистрированных акустических сигналов и приема команд управления работой средств регистрации выполнен в виде широкополосной подводной радиосвязи типа «Sea Tooth».
Внутри трубопровода размещен внутритрубный измерительный модуль, также снабженный акустическими датчиками, которые выполнены в виде параметрического преобразователя, состоящего из микропроцессора, формирователя сигналов накачки, параметрического излучающего тракта, приемного тракта, при этом излучающий тракт содержит формирователь сигналов накачки и многоэлементную мозаичную антенну, приемный тракт включает антенну, выполненную в виде решетки пьезокерамических n-приемников звука цилиндрической формы, каждый из которых имеет индивидуальную герметизацию, и закрепленных на плите, снабженной акустическим экраном, n-приемников, расположенных рядом, которые смещены относительно друг друга в вертикальной и горизонтальной плоскостях, корпус антенны закрыт звукопрозрачной мембраной, измерительный модуль установлен на дистанционном снаряде и соединен гидроакустическим каналом связи с радиоканалом передачи зарегистрированных акустических сигналов.
Сущность внутритрубного измерительного модуля поясняется чертежами (фиг.1-3).
Фиг.1. Блок-схема внутритрубного измерительного модуля. Блок-схема включает микропроцессор 1, предназначенный для формирования команд управления режимами работы и команд для трансляции зарегистрированной информации по радиоканалу 2 связи (для сухопутных условий) и по гидроакустическому каналу 3 связи (при размещении трубопровода на дне водоема), формирователь сигналов накачки 4, предназначенный для формирования двухчастотных зондирующих сигналов накачки заданной длительности и несущей частоты, формирования импульсов синхронизации и сигналов стробирования приемного тракта, параметрический излучающий тракт 5, предназначенный для усиления сигналов накачки (при этом в отдельных каналах восьмиканального усилителя мощности осуществляется коррекция разности фаз и регулировка амплитуд) и преобразования посредством многоэлементной мозаичной антенны накачки в акустические сигналы, приемный тракт 6, предназначенный для преобразования акустической энергии эхо-сигналов посредством широкополосной приемной антенны, частотной селекции, усиления и обработки сигналов.
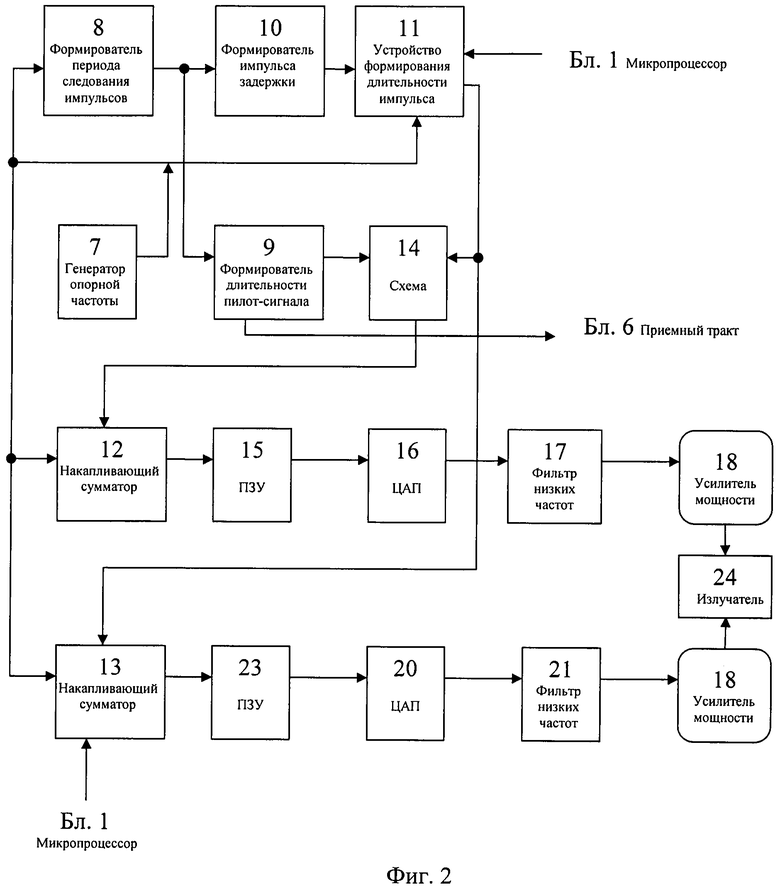
Фиг.2. Функциональная схема формирователя сигналов накачки. Высокостабильный кварцевый генератор опорной частоты 7 вырабатывает импульсы с частотой 2,048 МГц. Выбор тактовой частоты такой величины дает возможность перестраивать при необходимости частоты накачки с дискретностью 0,5 кГц в пределах от 140 до 147 кГц. Прямоугольные импульсы уровня ТТЛ подаются на вход формирователя периода следования импульсов 8, на выходе которого формируются короткие импульсы с периодом 100 мс. Они поступают на формирователь длительности пилот-сигнала 9, а также через формирователь импульса задержки 10 - на вход устройства формирования длительности импульса 11, на выходе которого формируются прямоугольные импульсы, длительность которых может изменяться посредством команд из устройства управления параметрами микропроцессора 1. Сформированные таким образом прямоугольные импульсы заданной длительности и с определенной частотой повторения поступают на два канала формирования радиоимпульсов с частотами накачки, различающихся между собой тем, что в одном из них частота не регулируется и составляет 154 кГц, а во втором частота может изменяться в пределах от 140 до 147 кГц. Основу обоих каналов формирователя составляют накапливающие сумматоры 12 и 13. На вход накапливающего сумматора 12 первого канала через схему И 14 поступают, во-первых, короткие импульсы длительностью 0,1 мс с формирователя длительности пилот-сигнала 3 и, во вторых, через время задержки, равное 2 мс - импульсы с устройства формирователя длительности импульса 11. Накапливающий сумматор управляется тактовыми импульсами генератора опорной частоты 7. Восьмиразрядные коды адресов с накапливающего сумматора 12 поступают в ПЗУ 15, в котором записан период синусоиды. Благодаря этому производятся выборки (всего 256 выборок) и в виде восьмиразрядных кодов данных подаются на вход ЦАП 16. С выхода ЦДЛ 16 через фильтр низких частот 17 прямоугольные импульсы поступают на вход резонансного четырехканального усилителя мощности 18. На вход накапливающего сумматора 13 второго канала поступают импульсы с формирователя длительности импульсов 11. Накапливающий сумматор 13 управляет тактовыми импульсами генератора опорной частоты 7. Коды адресов с накапливающего сумматора 13 поступают в ПЗУ 23, где производятся выборки синусоиды и виде восьмиразрядных кодов данных подаются на вход ЦАП 20. С выхода ЦАП 20 через фильтр нижних частот 21 прямоугольные импульсы поступают на вход второго четырехканального усилителя мощности 22. С выхода формирователя длительности пилот-сигнала 9 импульсы поступают на стробирующее устройство 27 приемного тракта (приемника), которое служит для запирания усилителя мощности 22 на время посылки. Изменение частоты второго канала и длительности зондирующих импульсов производится соответствующими двоичными кодами, подаваемыми из микропроцессора 1. Усилители мощности 18 и 22 образуют общий усилитель мощности, который состоит из восьми идентичных широкополосных блоков мощностью до 500 Вт каждый, разбитых на две группы по четыре блока для усиления частот накачки f1 и f2, и содержит восемь фазокомпенсационных устройств, выходные и предварительные усилители. Выходные усилители питаются напряжением +40 В и -40 В, а предварительные усилители питаются напряжением +20 В и -20 В. Выходной усилитель включает в себя комплементарную пару среднемощных транзисторов и параллельно включенные комплементарные пары мощных транзисторов. Предварительный усилитель состоит из операционного усилителя и двух пар среднемощных транзисторов.
Параметрический излучающий тракт 5 включает формирователь накачки 4 и излучатель, выполненный в виде мозаичной антенны 24, которая излучает волну накачки с частотой fн. Поскольку частота накачки довольно высока, то волна накачки отражается от границы раздела транспортируемый продукт - внутренняя поверхность трубопровода и распространяется в сторону приемного тракта 6. Волна накачки будет взаимодействовать вследствие нелинейности среды распространения с низкочастотными сигналами с частотой F, отраженными от участков трубопровода с дефектами. Результатом взаимодействия будут волны с комбинационными частотами fн±F либо изменения фазы волны накачки. Антенна представляет собой многоэлементную решетку, состоящую из четырех двухчастотных каналов каждая. Элементы в каждой подрешетке расположены в порядке чередования типов с разной частотой и рассчитаны так, чтобы обеспечить наибольшую однородность акустического поля по обеим частотам. Активная часть двухчастотной мозаичной антенны выполнена из пьезокерамики стержневого типа. Разделение антенны на восемь каналов позволяет добиться получения необходимой мощности и высокой надежности при работе транзисторных усилителей мощности. Антенна накачки имеет прямоугольную форму с площадью активной поверхности 260×160 мм. Ширина характеристики направленности по уровню -3 дБ составляет 2×4 градуса и постоянна в диапазоне рабочих частот. Конструктивно антенна накачки выполнена в прямоугольном сварном корпусе. Конструкция антенны предусматривает работу при избыточном статическом давлении 2 МПа. С этой целью для обеспечения одностороннего излучения используется акустический экран, выполненный в виде перфорированной пластины из гетинакса.
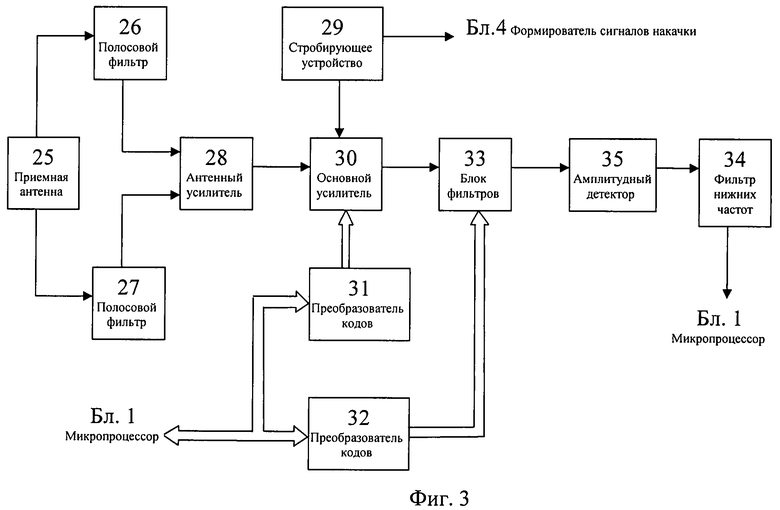
Фиг.3. Структурная схема приемного тракта 6. Приемный тракт 6 предназначен для приема, усиления, частотной селекции и обработки отраженных сигналов разностной частоты в полосе частот 7-14 кГц. Чувствительность его по акустическому давлению составляет не менее 0,02Па. Приемник выполнен по схеме прямого усиления. Приемный тракт включает приемную антенну 25, полосовые фильтры 26 и 27, антенный усилитель 28, стробирующее устройство 29, основной усилитель 30, преобразователи кодов 31 и 32, блок фильтров 33, фильтр нижних частот 34, амплитудный детектор 35.
Полосовые фильтры 25 и 26 служат для подавления частот сигналов накачки, а также помех ниже частот рабочего диапазона и представляют собой пассивные фильтры верхних и нижних частот, включенных последовательно. Подавление сигналов частот накачки не хуже 60 дБ.
Антенный усилитель 28 представляет собой малошумящий предварительный усилитель. Для ослабления синфазной помехи последний его каскад выполнен в дифференциальном включении. Уровень приведенных ко входу шумов усилителя в полосе 7-14 кГц составляет 1,5 мкВ. Коэффициент усиления 26 дБ.
Основной усилитель 30 выполнен трехкаскадным с регулировкой усиления, которая осуществляется цифровыми кодами. Диапазон регулировки составляет 0-90 дБ.
Стробирующее устройство 29 служит для запирания основного усилителя 30 в момент посылки и вырабатывает запирающие импульсы необходимой длительности и полярности. Синхронизация стробирующего устройства 29 осуществляется импульсом запуска формирователя длительности пилот-сигнала 3.
Блок фильтров 33 представляет собой набор фильтров верхних и нижних частот, которые с помощью коммутации объединяются в полосовые фильтры с переменной полосой пропускания. Управление коммутаторами, а следовательно, и полосой пропускания блока фильтров 33 осуществляется цифровыми кодами. Частоты среза фильтров верхних частот составляет 6, 9 и 13 кГц, а частота среза фильтров нижних частот составляет 8, 12 и 15 кГц. Преобразователи кодов 31 и 32 служат для преобразования кодов управления от микропроцессора 1 в необходимые коды для цифровых входов основного усилителя 30 и блока фильтров 33.
Амплитудный детектор 35 и фильтр нижних частот 34 образуют линейный детектор, который служит для выделения огибающей отраженных сигналов ВРЧ в динамическом диапазоне 40 дБ.
Приемный тракт 6 работает следующим образом. Акустические эхо-сигналы принимаются приемной антенной 25 и поступают на полосовые фильтры 26 и 27, в которых осуществляется частотная селекция, и на вход двухканального дифференциального антенного усилителя 28 для предварительного усиления и подавления синфазной помехи. С выхода антенного усилителя 28 сигнал поступает на вход основного усилителя 30, коэффициент усиления которого зависит от кода, поступающего на цифровые входы антенного усилителя с преобразователя кодов 31. Запирание основного усилителя 30 на время посылки осуществляет стробирующее устройство 29, которое синхронизируется импульсом запуска формирователем длительности пилот-сигнала 3. С выхода основного усилителя 30 усиленный сигнал поступает на вход полосовых фильтров 26 и 27 с регулируемой полосой пропускания. На цифровой вход коммутатора блока фильтров 33 необходимый код поступает с преобразователя кодов 32. С выхода блока фильтров 33 сигнал подается на вход амплитудного детектора 35, который выделяет модуль знакопеременного сигнала. Продетектированный сигнал поступает на фильтр нижних частот 34, в котором осуществляется выделение огибающей. Затем полученная информация поступает в микропроцессор 1 для последующей трансляции на дисплей диспетчерского пункта по радиоканалу 2 связи (для сухопутных условий) и по гидроакустическому каналу 3 связи (при размещении трубопровода на дне водоема).
Аналогом конструкции радиоканала является конструкция радиоканала, описанная в [патент RU №2196312], а аналогом конструкции гидроакустического канала связи является конструкция, приведенная в описании к патенту [патент RU №2300781].
Антенна 25 представляет собой решетку пьезокерамических приемников звука, каждый из которых имеет индивидуальную герметизацию. Пьезокерамические приемники собраны в две группы и подключаются к дифференциальным входам предварительного усилителя для снижения синфазной электрической помехи. Антенна 25 содержит десять цилиндрических приемников, закрепленных на плите. Для экранирования сигналов, проходящих с тыльной стороны антенны, применен акустический экран. Приемники, расположенные рядом, смещены относительно друг друга для снижения уровня боковых лепестков в характеристике направленности. Корпус антенны 25 закрыт звукопрозрачной мембраной. Чувствительность приемной антенной решетки по акустическому давлению составляет не менее 500 мкВ/Па в полосе частот от 7 до 14 кГц.
Конструктивное исполнение параметрического излучающего тракта 5 обеспечивает дискретное сканирование внутреннего пространства, которое осуществляется путем шагового обзора за счет облучения узкой характеристикой направленности излучателя ограниченной зоны пространства и приема эхо-сигналов в пределах всего сектора, в котором осуществляется обзор. Цикл обзора равен промежутку времени между двумя последовательными излучениями: Тобз=2хmах/с, где хmах - максимальная дальность излучения. Перед каждым излучением сигнала характеристика направленности антенны 24 поворачивается на угол, равный ее ширине (шаг поиска). Полное время обзора заданного сектора определяется циклом обзора и отношением величины сектора к ширине характеристики направленности.
При обнаружении дефекта микропроцессором 1 формируется команда на формирование высокой направленности, что обеспечивает более надежное определение местоположения выявленного дефекта.
В общем случае внутритрубный измерительный модуль представляет акустическое средство профилеметрических измерений.
Внутритрубный измерительный модуль выполнен в форме снаряда, который также снабжен бесплатформенной инерциальной навигационной системой с магниторезистивным магнитометром и системой управления и стабилизации, что позволяет решать следующие задачи:
1. Точное определение местоположения трассы (позиционирование) трубопровода на местности, так называемый «mapping», что, в первую очередь, отвечает обязательным требованиям международного стандарта безопасности, выработанным ASME (American Society of Mechanical Engineers), особенно жестким для урбанизированных районов прокладки трубопровода, а также решает ряд прикладных вопросов (упрощает проведение ремонтных работ в отдаленных районах и т.д.).
Точность вычисления координат определяется типом применяемых инерциальных чувствительных элементов и числом маркерных точек с известными координатами (полученных с помощью GPS) по трассе трубопровода.
2. Определение с высокой точностью изгибов и деформаций линий трубопровода. Сравнение результатов съемок, производимых внутритрубным измерительным модулем через определенные промежутки времени, обеспечивает точный мониторинг планово-высотных смещений трубопровода и его изгибов.
Что касается, таких магистральных трубопроводов как, например Североевропейский газопровод, который характеризуется большой протяженностью морских участков (около 1200 км) и отсутствием шлюзовых камер по трассе, то применение бесплатформенной инерциальной навигационной системы с современными инерциальными ЧЭ позволит измерить даже небольшие смещения и изгибы газопровода, причем с одинаково высокой точностью на протяжении всей трассы. При этом в качестве реперных точек могут быть приняты поперечные сварные швы с известными географическими координатами, полученными при прокладке.
3. Точная привязка выявленных дефектов и аномалий стенок трубы.
Бесплатформенная инерциальная навигационная система позволяет определить точные угловые и линейные координаты выявленных акустическим профилемером дефектов. Кроме того, данные профилеметрической акустической диагностики и выходные данные сочетаются в бортовой системе внутритрубного измерительного модуля, что значительно снижает объем последующей обработки.
Бесплатформенная инерциальная навигационная система предназначена для измерения углов курса, крена и дифферента внутритрубного измерительного модуля, составляющих векторов угловой скорости, линейного ускорения, компонент магнитного поля. В качестве чувствительных элементов используются микромеханические датчики угловой скорости и линейного ускорения. Для измерения компонент магнитного поля используется магниторезистивный магнитометр. Магнитометр используется в качестве корректора для компенсации погрешностей угловой ориентации, возникающих вследствие дрейфа микромеханических гироскопов. Аналоговые данные, поступающие с датчиков первичной информации, обрабатываются аналого-цифровым преобразователем высокой разрядности. Для реализации вычислительных алгоритмов в состав блока входит высокопроизводительный цифровой сигнальный процессор.
В качестве базовых чувствительных элементов использованы три датчика угловой скорости и три акселерометра, встроенный датчик температуры и собственный контроллер, обеспечивающий предварительную обработку сигналов гироскопов и акселерометров и выдачу ее в цифровом виде потребителям. Встроенный датчик температуры предназначен для коррекции температурных дрейфов датчиков угловой скорости и акселерометров. В качестве измерителя индукции магнитного поля используются магниторезистивные датчики. В качестве вычислителя применен цифровой сигнальный процессор Share ADSP21262LQFP.
Аппаратные средства системы управления и стабилизации обеспечивают независимое управление приводов каналов крена и курса, осуществляют измерение углов курса, крена и дифферента внутритрубного измерительного модуля, измерение компонент векторов угловой скорости, линейного ускорения, магнитного поля, формируют управляющие сигналы для решения целевых задач управления и стабилизации.
Вычислительно-управляющие алгоритмы реализуются посредством микропроцессора, построенного на базе DSP-процессора, работающего под управлением встраиваемой операционной системы uCLinux.
Независимый привод каждого из каналов управления построен на основе системы привода производства компании Faulhaber. Высокоточная цифровая система управления приводом обеспечивает высокое быстродействие, позволяет регулировать параметры привода в широком диапазоне, обеспечивает точное позиционирование по углу поворота оси привода колеса.
Микромеханический инерциальный измерительный блок (МИИБ) определяет углы курса, крена и дифферента, обеспечивает систему управления инерциальной и навигационной информацией.
Микропроцессор, построенный на основе DSP-процессора, является устройством, обеспечивающим программную и аппаратную интеграцию отдельных блоков, входящих в состав аппаратных средств системы. Процессор позволяет выполнять операции над 32-разрядными числами в формате с плавающей запятой, что обеспечивает точность вычислений, достаточную для решения большинства задач управления и навигации. Тактовая частота процессора составляет 400 МГц. Помимо процессора в состав платы вычислительно-управляющего модуля входят микросхемы памяти SDRAM, микросхемы памяти flash, микросхемы интерфейсов ввода-вывода. Такое построение системы позволяет решать в реальном времени сложные вычислительные задачи, большой объем оперативной памяти системы позволяет осуществлять реализацию ресурсоемких алгоритмов.
Различные компоненты, решающие задачи управления, навигации, стабилизации и регистрации акустических сигналов, подключены к микропроцессору с помощью последовательных синхронных и асинхронных портов ввода-вывода. Контроллеры привода каналов управления подключены к модулю с помощью асинхронных портов ввода-вывода UART0 и UART1. С помощью данных интерфейсов контроллерам передаются команды, задающие режимы движения валов, а контроллеры, в свою очередь, обеспечивают модуль информацией об угловом положении валов, токах в двигателях, скорости вращения.
Для управления ориентацией вокруг одной оси используется система привода, состоящая из двигателя постоянного тока с редуктором и магнитным энкодером и системы управления. Двигатель постоянного тока типа «Faulhaber» имеет конструкцию с полым ротором, что дает ряд преимуществ, таких как: низкое энергопотребление, отсутствие потерь в сердечнике ротора, низкое напряжение трогания, малый момент инерции ротора, позволяющие быстрые разгон и торможение, низкие массогабаритные показатели. В составе привода использован редуктор типа «Faulhaber» в исполнении со стальными шестернями для обеспечения повышенной износоустойчивости. Магнитный энкодер IE-512 обеспечивает высокое разрешение в 512 линий на оборот, что позволяет осуществлять плавное и высокоточное управление приводом.
В цифровом контроллере типа MCDC3003 в качестве вычислителя используется цифровой сигнальный процессор, что позволяет осуществлять высокоточное и высокоскоростное управление (0.18° - ошибка по углу, частота работы следящего контура - 100 Гц). Цифровой контроллер привода принимает по интерфейсу UART поступающие от вычислительно-управляющего модуля команды. Режимы работы привода задаются соответствующими форматами команд, при этом используются режимы управления по угловому положению (задается и поддерживается по достижении целевое угловое положение) и управления по скорости (задается величина угловой скорости вращения вала). Для настройки параметров следящего контура контроллера оператором (центральный диспетчерский пульт по обслуживанию газопровода) задается ряд параметров, таких как: максимальное угловое ускорение, максимальная угловая скорость, максимальный ток в двигателе, пропорциональный и интегральный коэффициенты цепи обратной связи по угловой скорости, пропорциональный и дифференциальный коэффициенты цепи обратной связи по угловому положению вала. Все вышеперечисленные коэффициенты могут быть подобраны исходя из заданного критерия оптимальности и изменены в процессе работы для адаптации к изменившемуся режиму движения.
Конструкция внутритрубного измерительного модуля позволяет использовать его в магистральных трубопроводах при скоростях движения газа 12-15 м/с при давлении 25 МПа.
Промышленная реализация предлагаемого технического решения трудностей не представляет, так как основные узлы и элементы имеют серийное производство.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2432558C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ТРУБОПРОВОДАХ | 2010 |
|
RU2439551C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2010 |
|
RU2439550C1 |
Изобретение относится к контрольно-измерительной технике и предназначено для диагностики преимущественно подводных магистральных трубопроводов. Изобретение направлено на повышение достоверности определения мест утечек транспортируемого продукта из магистральных трубопроводов, что обеспечивается за счет того, что, согласно изобретению, акустические датчики, входящие в состав изобретения, выполнены в виде набора полых цилиндрических пьезоэлементов с акустическим мягким экраном с размером активной поверхности 300×152 мм, внутри трубопровода размещен внутритрубный измерительный модуль, также снабженный акустическими датчиками, которые выполнены в виде параметрического преобразователя, состоящего из микропроцессора, формирователя сигналов накачки, параметрического излучающего тракта, приемного тракта. Излучающий тракт содержит формирователь сигналов накачки и многоэлементную мозаичную антенну, приемный тракт включает антенну, выполненную в виде решетки пьезокерамических n-приемников звука цилиндрической формы, каждый из которых имеет индивидуальную герметизацию и закрепленных на плите, снабженной акустическим экраном, n-приемников, расположенных рядом, которые смещены относительно друг друга в вертикальной и горизонтальной плоскостях. Корпус антенны закрыт звукопрозрачной мембраной. Измерительный модуль установлен на дистанционном снаряде и соединен гидроакустическим каналом связи с радиоканалом передачи зарегистрированных акустических сигналов. При этом внутритрубный измерительный модуль выполнен в форме снаряда, снабженного бесплатформенной инерциальной навигационной системой с магниторезистивным магнитометром и системой управления и стабилизации, соединенной гидроакустическим каналом связи с радиоканалом передачи акустических сигналов. 3 ил.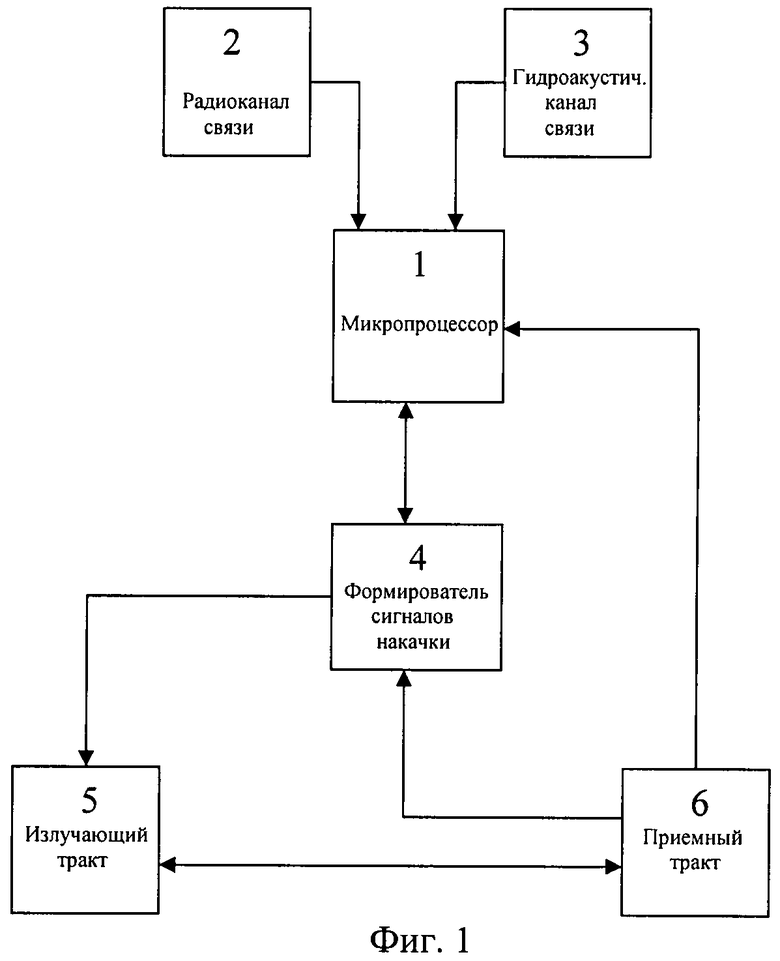
Устройство поиска мест утечек магистральных трубопроводов, содержащее акустические датчики, устанавливаемые на поверхности магистрального трубопровода, приемник, усилители, фильтры, аналого-цифровые преобразователи, дисплей, узкополосный фильтр и фильтр нижних частот, причем передатчик содержит усилители мощности, радиоканал передачи зарегистрированных акустических сигналов посредством акустических датчиков, отличающееся тем, что акустические датчики выполнены в виде набора полых цилиндрических пьезоэлементов с акустическим мягким экраном, с размером активной поверхности 300×152 мм, внутри трубопровода размещен внутритрубный измерительный модуль, также снабженный акустическими датчиками, которые выполнены в виде параметрического преобразователя, состоящего из микропроцессора, формирователя сигналов накачки, параметрического излучающего тракта, приемного тракта, при этом излучающий тракт содержит формирователь сигналов накачки и многоэлементную мозаичную антенну, приемный тракт включает антенну, выполненную в виде решетки пьезокерамических n-приемников звука цилиндрической формы, каждый из которых имеет индивидуальную герметизацию и закрепленных на плите, снабженной акустическим экраном, n-приемников, расположенных рядом, которые смещены относительно друг друга в вертикальной и горизонтальной плоскостях, корпус антенны закрыт звукопрозрачной мембраной, измерительный модуль установлен на дистанционном снаряде и соединен гидроакустическим каналом связи с радиоканалом передачи зарегистрированных акустических сигналов, при этом внутритрубный измерительный модуль выполнен в форме снаряда, снабженного бесплатформенной инерциальной навигационной системой с магниторезистивным магнитометром и системой управления и стабилизации, соединенной гидроакустическим каналом связи с радиоканалом передачи акустических сигналов.
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2196312C2 |
| СПОСОБ ЛЕЧЕНИЯ БОЛЬНЫХ С УМЕРЕННОЙ АРТЕРИАЛЬНОЙ ГИПЕРТЕНЗИЕЙ | 2009 |
|
RU2394549C1 |
| JP 2006266767 А, 05.10.2006 | |||
| Картофелепосадочный аппарат | 1946 |
|
SU79957A1 |
| Ручной инжектор для протравливания почвы | 1949 |
|
SU79956A1 |

