Изобретение относится к технике связи, а более конкретно к устройствам поворота и ориентации антенных систем по азимуту и углу места. Изобретение может быть использовано для ориентации антенн связи, имеющих небольшой угол поворота по углу места (не более 90-100 градусов), а также в робототехнике для поворота манипуляторов вокруг двух взаимно перпендикулярных осей.
Традиционные опорно-поворотные устройства для ориентации антенных систем содержат смонтированную на опоре поворотную платформу, обеспечивающую азимутальный поворот, и расположенный на поворотной платформе механизм поворота антенны по углу места, снабженные каждый своим отдельным приводом. При этом, как правило, привод азимутального поворота представляет собой электродвигатель и редуктор, а механизм поворота по углу места выполняется в виде рычажной системы с приводом возвратно-поступательного движения. Возвратно-поступательный привод реализуют либо на основе линейного электро- или гидродвигателя с ползуном (US 6820531, RU 2242826), либо на основе электродвигателя и передачи винт-гайка, или реечной передачи (см. US 4821596, US 4691207, RU 2020666). В этих устройствах двигатель привода угломестного поворота крепится на азимутальной поворотной платформе, что осложняет подвод электропитания или гидрожидкости.
Эта проблема решена в опорно-поворотном устройстве (ОПУ) по патенту US 5875685. ОПУ использует для обоих движений вращательные приводы с взаимно-перпендикулярными осями, причем оба привода расположены на неподвижном основании. Ориентируемая платформа прикреплена к основанию с помощью карданного подвеса. Такое устройство достаточно громоздко и допускает лишь небольшие углы поворота платформы вокруг обеих осей, в то время как для ОПУ антенны требуется угол азимутального поворота не меньше 180 градусов.
Известны ОПУ (RU 2209495, US 906914578), использующие одинаковую схему размещения приводов. ОПУ содержит вертикальный цилиндрический корпус, в котором с возможностью вращения посажен полый азимутальный вал и размещен привод азимутального вращения. Привод представляет собой двигатель и редуктор, расположенные в пространстве между азимутальным валом и стенкой корпуса. Выходной вал редуктора связан с азимутальным валом посредством зубчатой передачи. Механизм представляет собой цилиндр с горизонтальной осью вращения, жестко закрепленный на азимутальном валу. Горизонтальная ось (ось вращения по углу места) посажена в цилиндре с возможностью вращения и на ней на кронштейнах жестко закреплена поворотная платформа. Угломестная ось приводится во вращение вторым двигателем и зубчатой передачей, которые расположены внутри горизонтального цилиндра. Провода к угломестному двигателю проходят внутри полого азимутального вала. В этой конструкции приводы, размещенные внутри соответствующих цилиндров, предохраняются от внешних воздействий, а провода к вращающемуся двигателю проходят внутри вала, что предохраняет их от зацеплений движущимися частями и обрывов. Однако устройства по этой схеме все-таки имеют достаточно большие габариты и вес, особенно для крупногабаритных антенн, когда необходимы большие крутящие моменты, которые обеспечиваются редукторами с высоким передаточным отношением, обусловленные взаимным расположением обоих приводов относительно цилиндрического корпуса-опоры.
Известно ОПУ, выполненное в виде вертикальной колонны, и выбранное нами за прототип (US 4691207). Нижняя часть колонны представляет собой неподвижный цилиндрический корпус - опору, в котором вдоль оси размещен двигатель азимутального привода. С этим корпусом с помощью подшипника с возможностью вращения состыкован поворотный корпус такого же радиуса, образующий верхнюю часть колонны. Редуктор азимутального привода выполнен в виде планетарного редуктора с разноименным зацеплением колес (внешним и внутренним). Солнечное колесо внешнего зацепления посажено на вал двигателя, водилом является неподвижный цилиндрический корпус-опора, а коронное колесо внутреннего зацепления выполнено на внутренней поверхности поворотного корпуса. Снаружи в поворотном корпусе установлена ось вращения по углу места и поворотная платформа, на которой крепится антенна. Механизм поворота по углу места представляет собой линейный привод, связанный с помощью шарниров и тяги с поворотной платформой с образованием плеча относительно угломестной оси. Линейный привод представляет собой закрепленный внутри поворотного корпуса электродвигатель, связанный зубчатой передачей с винтом передачи винт-гайка. Подвижная в осевом направлении гайка является выходным звеном линейного привода. Такой линейный привод для обеспечения требуемой точности поворота должен иметь низкоскоростной двигатель или понижающий редуктор с высоким передаточным отношением. В данном ОПУ габариты уменьшены незначительно, только за счет размещения поворотного цилиндра вдоль вертикальной оси. По-прежнему ОПУ имеет большие радиальные размеры из-за использования линейного привода, размещенного в пространстве между двигателем и стенкой поворотного корпуса, в результате чего остается много неиспользуемого пространства. Кроме того, посадка поворотного корпуса на опору на одном подшипнике является очень ненадежной. В устройстве не решена проблема безопасного вывода проводов питания угломестного двигателя к неподвижным электрическим соединителям.
Таким образом, задачей изобретения является создание компактного привода ОПУ, все элементы которого, включая провода питания, скрыты внутри и надежно защищены от внешнего воздействия.
Техническим результатом, достигаемым изобретением, является такая компоновка узлов устройства, которая обеспечивает минимально возможные при данной мощности и силовых характеристиках габариты устройства.
Указанная задача решается следующим образом.
Опорно-поворотное устройство, как и прототип, выполнено в виде вертикальной колонны и содержит опору с установленным на ней приводом азимутального вращения. Приводом является двигатель с редуктором, выполненным по планетарной схеме с разноименным зацеплением колес. Водило редуктора жестко связано с опорой, а колесо внутреннего зацепления выполнено на внутренней поверхности поворотного корпуса, который посажен на опоре с возможностью вращения. С наружной стороны в поворотном корпусе установлена ось вращения по углу места, связанная с поворотной платформой. Устройство содержит также механизм поворота по углу места с отдельным приводом.
В отличие от прототипа механизм поворота по углу места выполнен в виде кривошипа на выходном звене угломестного привода, который через сферические шарниры и тягу связан с поворотной платформой с образованием плеча относительно угломестной оси. Такое выполнение механизма поворота по углу места позволяет использовать для поворота по углу места непосредственно вращательный привод, который теперь может быть выполнен также планетарным, имеющим минимальные габариты при прочих равных условиях. Для этого поворотный корпус выполнен как наружный кожух вертикальной колонны, посаженный своей нижней часть с помощью пары подшипников на внутреннюю цилиндрическую опору. Верхняя часть поворотного корпуса образует наружное звено планетарного редуктора угломестного привода, в котором с возможностью вращения посажено его водило. Центральные колеса планетарного редуктора имеют разноименное зацепление, т.е. выполнены как солнечное колесо внешнего зацепления и коронное колесо внутреннего зацепления. Коронное колесо выполнено на внутренней поверхности поворотного корпуса. Двигатель закреплен на водиле, которое одновременно является выходным звеном привода поворота по углу места.
В этой конструкции внутри поворотного корпуса между планетарными редукторами имеется свободное пространство, которое позволяет очень компактно и удобно разместить датчики поворотов. Они крепятся на оси поворотного корпуса на водилах соответствующих редукторов и соединяются выходами с поворотным корпусом.
Для вывода проводов питания угломестного двигателя и сигнальных проводов датчиков поворота в водилах обоих редукторов выполнены сквозные отверстия.
Для обеспечения требуемых малых скоростей поворота антенны и высоких крутящих моментов в качестве планетарных редукторов целесообразно использовать две ступени планетарных редукторов с двухвенцовыми сателлитами и с одним общим для обеих ступеней водилом, позволяющие получать высокие передаточные отношения.
Изобретение иллюстрируется чертежами (фиг.1-3). На фиг.1 дан внешний вид предлагаемого ОПУ. На фиг.2 представлена схема, иллюстрирующая принцип действия и компоновки опорно-поворотного устройства. Для простоты здесь редукторы представлены в виде простейших планетарных рядов с центральными колесами разноименного зацепления. В реальных устройствах передаточное отношение простого однорядного редуктора не может обеспечить необходимое для поворотной платформы снижение скорости вращения. На фиг.3 представлена схема ОПУ с планетарными двухступенчатыми редукторами с двухвенцовыми сателлитами.
Опорно-поворотное устройство внешне оформлено в виде вертикальной колонны (см. фиг.1). Нижняя часть колонны представляет собой цилиндрическую опору 1, которая фланцем 2 крепится к мачте антенны (мачта не показана). На цилиндрическую опору 1 с помощью подшипников 3 и 4 (см. фиг.2) посажен цилиндрический поворотный корпус 5, состоящий из двух половин 5а и 5б, жестко связанных друг с другом посредством фланцев 6 и резьбовых соединений 7 (на фиг.2 и 3 фланцы и резьбовое соединение показаны условно). В принципе, поворотный корпус 5 может быть выполнен и в виде единой детали, но тогда усложняются условия сборки ОПУ. Снаружи в поворотном корпусе перпендикулярно к его оси с двух диаметрально противоположных сторон установлены две полуоси, образующие ось 8 поворота по углу места. На этой оси с возможностью поворота относительно нее на кронштейнах 9 установлена поворотная платформа 10, к которой крепится антенна 11. На фиг.2 и 3 для наглядности ось 8 вынесена за пределы поворотного корпуса 5 и установлена в кронштейнах 12, а поворотная платформа 10 установлена непосредственно на оси.
Рассмотрим схему ОПУ на фиг.2. Нижняя часть 5а поворотного корпуса 5 совместно с цилиндрической опорой 1 образует привод поворота по азимуту, который в общем случае содержит планетарный редуктор 13 и двигатель 14. Двигатель 14 расположен внутри цилиндрической опоры 1. Верхняя часть цилиндрической опоры 1 выполняет функцию водила планетарного редуктора 13. Для этого она выполнена из двух жестко связанных друг с другом дисков 15 и 16. В дисках 15 и 16 с возможностью вращения установлены оси 17 планетарных колес 18. Входное солнечное колесо 19 планетарного редуктора 13 посажено на валу 20 электродвигателя 14. Коронное колесо внутреннего зацепления 21 редуктора 13 выполнено на внутренней поверхности нижней части 5а поворотного корпуса 5, делая корпус 5 выходным звеном азимутального привода.
Верхняя часть 5б поворотного корпуса 5 является наружным корпусом планетарного редуктора 22 привода поворота по углу места. Внутри этого корпуса на подшипниках 23 и 24 посажено водило планетарного редуктора 22. Оно также образовано двумя жестко связанными дисками 25 и 26. Верхний диск 25 выполнен с кромками, выступающими за пределы подшипников 23, так что образует верхнюю крышку ОПУ в целом. Двигатель 27 привода по углу места закреплен на верхнем диске 25 водила. Входное солнечное колесо 28 планетарного редуктора 22 посажено на вал 29 двигателя 27. В дисках 25 и 26 водила посажены с возможностью вращения оси 30 сателлитов 31. Коронное колесо внутреннего зацепления 32 выполнено на внутренней поверхности поворотного корпуса 5, который для планетарного редуктора 22 служит реактивным звеном. Выходным звеном планетарного редуктора 22 является диск 25 водила. Кривошип 33, установленный на верхнем диске 25 водила через сферический шарнир 34, тягу 35 и второй сферический шарнир 36 связан с поворотной платформой 10 с образованием плеча L относительно оси 8 поворота по углу места.
Внутри поворотного корпуса 5 между дисками 16 и 26 редукторов 13 и 22 имеется свободное пространство, которое очень удобно использовать для размещения датчиков поворотов. Датчик 37 азимутального поворота закреплен на верхнем диске 16 неподвижной опоры 1. Выход датчика 37 связан с поворотным корпусом 5, и датчик измеряет угол поворота между неподвижной опорой 1 и поворотным корпусом 5. Датчик 38 поворота по углу места закреплен на нижнем диске 26, который жестко связан с диском 25, являющимся выходным звеном привода по углу места. Выход датчика 38 связан с поворотным корпусом 5, и датчик 38 измеряет угол поворота между корпусом 5 и выходным валом редуктора 22, напрямую связанным с углом поворота по углу места.
Таким образом, опорно-поворотное устройство представляет собой вертикальную закрытую сверху колонну, все элементы приводов которой размещены внутри этой колонны. Для вывода наружу проводов 39 питания электродвигателя 27, а также сигнальных проводов от датчиков 37 и 38 в водилах обоих редукторов выполнены сквозные отверстия 40 и 41. При этом отверстие 40 является неподвижным, так как выполнено в неподвижном элементе, а отверстие 41 в процессе работу ОПУ перемещается по орбите вокруг азимутальной оси поворотного устройства, т.е. перемещается относительно отверстия 40. Поэтому провода 39 и сигнальные провода датчика 38 должны иметь запас длины, уложенный в пространстве между дисками 16 и 26 в виде петель 42 и 43.
На фиг.2 планетарный редуктор каждого привода выполнен по схеме 2К-Н в виде одного планетарного ряда с разноименным зацеплением центральных колес. Т.е. одно из центральных колес имеет внешнее зацепление с сателлитами, а другое - внутреннее зацепление. Такие планетарные редукторы имеют передаточное отношение в диапазоне 3-8, не более. Этого отношения недостаточно для опорно-поворотных устройств крупногабаритных антенн, где требуются передаточные отношения порядка нескольких тысяч или десятков тысяч. Поэтому в качестве редукторов обоих приводов целесообразно выбирать двухступенчатую схему планетарных редукторов с общим водилом и двухвенцовыми сателлитами, которая обеспечивает более высокие передаточные отношения. Схема ОПУ с такими редукторами показана на фиг.3.
На этой фигуре одинаковые с фиг.1 и 2 позиции обозначены теми же цифрами. Точно также опорно-поворотное устройство выполнено в виде вертикальной колонны, в нижней части которой размещен азимутальный привод, состоящий из двигателя 14 и планетарного редуктора 13. Планетарный редуктор 13 состоит из двух планетарных ступеней, имеющих общее водило, функцию которого выполняет верхняя часть неподвижной опоры 1. Общее водило образовано верхним диском 16, нижним диском 15 и промежуточным диском 44, жестко связанными друг с другом. Промежуточный диск 44 служит опорой для установки осей 17 сателлитов 18 первого планетарного ряда. Сателлиты первого планетарного ряда выполнены с двумя венцами 45 и 46. Венец 45 зацепляется с солнечным колесом 19, а венец 46 зацепляется со вторым солнечным колесом 47 первого планетарного ряда. Колесо 47 жестко связано с солнечным колесом 48 второго планетарного ряда. Оси 49 сателлитов второго планетарного ряда установлены с возможностью вращения в дисках 44 и 16 общего водила. Сателлиты второго планетарного ряда также выполнены с двумя венцами 50 и 51, которые зацепляются с солнечным колесом 48 и коронным колесом внутреннего зацепления 52 соответственно. Колесо 52 внутреннего зацепления выполнено на внутренней поверхности цилиндрического поворотного корпуса 5 и является выходным звеном редуктора 13.
Точно так же общее водило планетарного редуктора 22 угломестного привода выполнено в виде жестко связанных: верхнего диска 25, нижнего диска 26 и промежуточного диска 53. Первая ступень редуктора образована солнечным колесом 28 на валу 29 двигателя 27, двумя венцами 54 и 55 сателлита и солнечным колесом 56. Вторую ступень редуктора образуют солнечное колесо 57, двухвенцовый (58 и 59) сателлит и коронное колесо внутреннего зацепления 60. Колесо 60 внутреннего зацепления выполнено на внутренней поверхности верхней части 56 поворотного корпуса 5. Точно так же, как и на предыдущей схеме, угломестный привод с планетарным редуктором 22 отрабатывает поворот водила с выходным диском 25, относительно поворотного корпуса 5, который приводится в независимое вращение от азимутального привода с редуктором 13.
Рассмотрим сначала действие опорно-поворотного устройства с более простой схемой редукторов, изображенной на фиг.2, так как она более наглядно иллюстрирует принцип работы ОПУ. Пусть вначале двигатель 27 поворота по углу места выключен. При включении двигателя 14 азимутального поворота начинает вращаться солнечное колесо 19 планетарного редуктора 13. Поскольку в редукторе реактивным неподвижным звеном является водило, выполненное за одно целое с цилиндрической опорой 1, то вращение передается на коронное колесо 21, которое вращает поворотный корпус 5 вокруг вертикальной оси со скоростью, определяемой передаточным отношением редуктора 13. Вместе с поворотным корпусом 5 вокруг вертикальной оси вращается и жестко связанная с ним ось 8, и поворотная платформа 10 с антенной 11.
Рассмотрим, как будет себя вести при этом редуктор 22 привода поворота по углу места. Входным звеном у него будет коронное колесо 32 внутреннего зацепления, жестко связанное с вращающимся поворотным корпусом 5 при свободе всех остальных звеньев редуктора. В таких условиях редуктор 22 будет вращаться целиком вместе с поворотным корпусом 5, а его выходное звено - диск 25 водила будет неподвижен относительно поворотного корпуса 5. Т.е. водило редуктора 22, кривошип 33, тяга 35 и поворотная платформа 10 будут вращаться вместе с корпусом 5 относительно вертикальной оси, не изменяя положения друг относительно друга, а следовательно, и не изменяя наклона антенны 11 по углу места.
Поскольку двигатель 27 закреплен на диске 25 водила, то он вращается вместе с поворотным корпусом 5 относительно неподвижного водила редуктора 13. Отверстие 41 в водиле редуктора 22, расположенное на некотором расстоянии от оси вращения, будет перемещаться относительно отверстия 40 в неподвижном водиле редуктора 13 на угол азимутального поворота антенны, который обычно составляет 210 угловых градусов. Поэтому провода 39 питания двигателя должны иметь достаточный запас длины в виде петли 42. Датчик 41 поворота по углу места при этом вращается также вместе диском 26 водила и поворотным корпусом 5 относительно неподвижного диска 16. Его сигнальные провода также должны иметь запас длины.
При включении питания двигателя 27 в планетарном редукторе 22 вторым входным звеном становится солнечное колесо 28. Редуктор 22 начинает работать как дифференциальная передача, отрабатывая вращение водила (диска 25) относительно коронного колеса внутреннего зацепления 32. Т.е. диск 25 вместе с двигателем 27 и кривошипом 33 начинает вращаться относительно поворотного корпуса 5 со скоростью, определяемой передаточным отношением редуктора 22. Поворот кривошипа 33 с помощью сферических шарниров 34 и 36 преобразуется в пространственное перемещение тяги 35, которая приближает или отдаляет точку ее крепления к поворотной платформе 10 к или от вертикальной оси передачи. Это перемещение вызовет поворот платформы 10 вокруг оси 8, т.е. поворот платформы 10 по углу места.
Поворот антенны по углу места не превышает 45 градусов, поэтому поворот кривошипа 33 относительно поворотного корпуса 5 также ограничен (определяется соотношением длин плеча L и кривошипа) и на практике не превышает ±25 угловых градусов. К повороту двигателя 27, закрепленного на диске 25, относительно неподвижной опоры (диска 16) добавляется или отнимается поворот двигателя относительно поворотного корпуса. То же самое относится и к повороту датчика 38. Этот факт следует учитывать при определении необходимого запаса длины проводов питания и сигнальных проводов датчика.
Принцип работы ОПУ на фиг.3 мало чем отличается от вышеописанного. Все различия сводятся только к отличиям в работе более сложного двухступенчатого редуктора. При включении двигателя 14 азимутального привода вращение его вала 19 через цепочку шестерен 19, 45, 44, 47, 48, 50, 51 передается на коронное колесо 52, вращающее поворотный корпус 5 относительно опоры 1 с более значительным, чем в предыдущем описании, снижением скорости. Точно так же вместе с поворотным корпусом 5 вращается ось 8 поворота по углу места вместе с поворотной платформой 10, а также редуктор 22, все элементы которого вращаются вокруг вертикальной оси как единое целое.
При включении двигателя 27 привода поворота по углу места вращение его выходного вала 29 через цепочку шестерен 28, 54, 55, 56, 57, 58, 59 создает момент вращения на общем водиле редуктора относительно поворотного корпуса 5. Под действием этого момента диск водила 25 поворачивается относительно поворотного корпуса 5, вызывая перемещение тяги 35 и поворот платформы 10 по углу места вокруг оси 8.
Выполнение редукторов обоих приводов по планетарной схеме минимизирует габариты и вес предлагаемого ОПУ при прочих равных условиях. Кроме того, все элементы приводов поворотного устройства расположены внутри компактной вертикальной колонны и защищены от внешних воздействий. Все это продлевает срок службы и повышает надежность ОПУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-поворотное устройство антенны | 2017 |
|
RU2659181C1 |
| Опорно-поворотное устройство | 2016 |
|
RU2634333C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| МЕХАНИЗМ ПОВОРОТА | 2007 |
|
RU2340544C1 |
| МОТОР-КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2736473C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| МЕХАНИЗМ ПОВОРОТА | 1994 |
|
RU2083474C1 |
| МЕХАНИЗМ ПОВОРОТА | 1996 |
|
RU2093453C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ВЕДУЩИЙ УПРАВЛЯЕМЫЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2468936C2 |
Опорно-поворотное устройство предназначено для ориентации антенных систем по азимуту и углу места, но может быть также использовано в робототехнике для поворота манипуляторов в разных плоскостях. Опорно-поворотное устройство выполнено в виде вертикальной колонны, наружный цилиндрический поворотный корпус (5) которой посажен с возможностью вращения на неподвижную цилиндрическую опору (1). Двигатель (14) привода азимутального поворота размещен в цилиндрической опоре (1), а планетарный редуктор (13) размещен в нижней части (5а) поворотного корпуса (5). Выходное коронное колесо (21) редуктора (13) выполнено на внутренней поверхности поворотного корпуса (5). Снаружи на поворотном корпусе (5) установлена ось (8) вращения по углу места с поворотной платформой (10). Механизм поворота по углу места выполнен в виде кривошипа (33) на выходном валу привода, связанного сферическими шарнирами (34 и 36) и тягой (35) с поворотной платформой (10), с образованием плеча L относительно оси (8), что позволяет использовать в угломестном приводе планетарный редуктор, который при прочих равных условиях обладает наименьшими габаритами и массой. Планетарный редуктор (22) привода поворота по углу места размещен в верхней части (56) поворотного корпуса, в которой с возможность вращения посажено водило, образованное дисками (25 и 26). Диск (25) является выходным звеном редуктора (22). Технический результат - повышение компактности конструкции, многие детали которой являются общими для двух и более узлов. 3 з.п. ф-лы, 3 ил.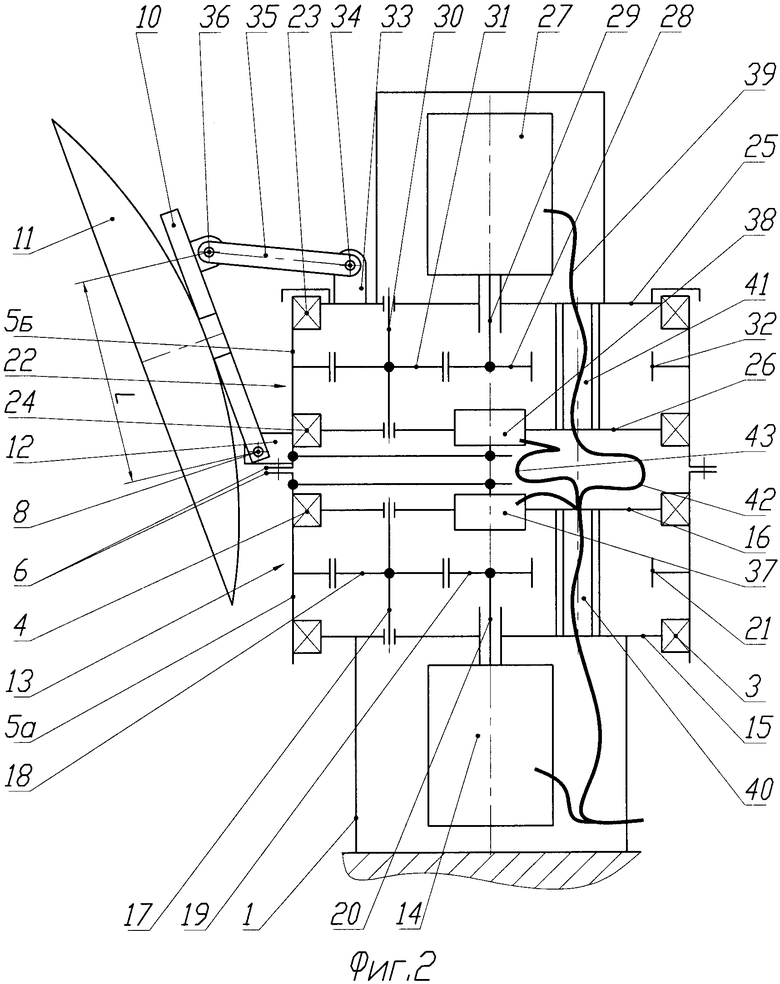
1. Опорно-поворотное устройство, выполненное в виде вертикальной колонны и содержащее опору с установленным на ней приводом азимутального вращения, состоящим из двигателя и планетарного редуктора с разноименным зацеплением колес, с закрепленным на опоре водилом, и с выходным коронным колесом внутреннего зацепления, которое выполнено на внутренней поверхности поворотного корпуса, посаженного на опоре с возможностью вращения, в поворотном корпусе установлена ось поворота по углу места, с которой связана поворотная платформа, а также механизм поворота по углу места с отдельным приводом, отличающееся тем, что механизм поворота по углу места выполнен в виде кривошипа на выходном звене угломестного привода, который через сферические шарниры и тягу связан с поворотной платформой с образованием плеча относительно угломестной оси, поворотный корпус выполнен как наружный кожух вертикальной колонны и посажен своей нижней частью с помощью пары подшипников на внутреннюю цилиндрическую опору, и образующий своей верхней частью наружное звено редуктора привода по углу места, выполненного в виде планетарного механизма с разноименным зацеплением колес, коронное колесо внутреннего зацепления которого выполнено на внутренней поверхности опорного корпуса, водило посажено с возможностью вращения в верхней части поворотного корпуса, на водиле жестко закреплен двигатель угломестного привода, и водило является выходным звеном привода.
2. Опорно-поворотное устройство по п.1, отличающееся тем, что в промежутке между планетарными редукторами на водилах соответствующих редукторов на оси поворотного корпуса установлены датчики поворотов, выходы которых связаны с поворотным корпусом.
3. Опорно-поворотное устройство по п.2, отличающееся тем, что в водилах первого и второго редукторов выполнены сквозные каналы для вывода проводов питания угломестного двигателя и сигнальных проводов датчиков поворотов.
4. Опорно-поворотное устройство по любому из пп.1-3, отличающееся тем, что оба планетарных редуктора выполнены из двух планетарных ступеней с двухвенцовыми сателлитами и общим для обеих ступеней водилом.
| US 4691207 А, 01.09.1987 | |||
| Опорно-поворотное устройство антенны | 1988 |
|
SU1697160A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО АНТЕННЫ С ОГРАНИЧЕННЫМ СЕКТОРОМ НАВЕДЕНИЯ | 2003 |
|
RU2242826C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2002 |
|
RU2209495C1 |
| US 4821596 А, 18.04.1989. | |||

