Изобретение относится к комплексам средств автоматизации информационно-управляющих систем управления и контроля за состоянием удаленных объектов, функционирующих в реальном масштабе времени, и может быть использовано для формирования виртуальной искусственной среды, предъявляемой оператору.
Известна система мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов, содержащая аппаратуру сбора, обработки, преобразования и хранения информации, имеющую вход для ввода информации от источников информации, а также аппаратуру отображения информации и ввода-вывода данных, включающую устройства отображения информации, пульты ввода команд с рабочих мест операторов (номеров боевого расчета) и блоки ввода-вывода данных [1].
Известная система мониторинга оперативной обстановки позволяет формировать виртуальную искусственную среду, предъявляемую оператору, за счет формирования на рабочих местах операторов динамических двумерных (плоских) информационных моделей сложной реальной обстановки. Однако данная система не обеспечивает реализм виртуальной искусственной среды, предъявляемой оператору, что снижает эффективность управления в различных условиях складывающейся обстановки.
Технический результат состоит в создании виртуальной искусственной среды для интерактивных систем оперативного управления процессами, развивающимися в реальном трехмерном пространстве, за счет формирования на рабочих местах операторов динамических квазиобъемных информационных моделей сложной реальной обстановки.
Для достижения указанного технического результата в систему мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов, содержащую аппаратуру сбора, обработки, преобразования и хранения информации, имеющую вход для ввода информации от источников информации, а также аппаратуру отображения информации и ввода-вывода данных, включающую на каждом рабочем месте устройство отображения информации, пульт ввода команд и блок ввода-вывода данных, введены блок хранения статической информации, блок формирования трехмерной модели, блок формирования двухмерной модели и блок хранения динамической информации, включенные в состав аппаратуры сбора, обработки, преобразования и хранения информации, при этом аппаратура отображения информации и ввода-вывода данных на каждом рабочем месте выполнена в виде автоматизированного рабочего места оператора, блок хранения статической информации содержит блок формирования и корректировки моделей статических объектов, блок хранения трехмерных моделей статических объектов и блок хранения цифровой карты местности, блок формирования трехмерной модели содержит первый блок интеграции, блок поворота и наклона, блок управления источником и интенсивностью освещения, блок формирования сечений и блок формирования координат точки нахождения наблюдателя, блок формирования двухмерной модели содержит второй блок интеграции, блок масштабирования, блок отбора объектов отображения по различным признакам и блок выбора участка местности, блок хранения динамической информации содержит блок формирования и корректировки моделей динамических объектов, блок хранения трехмерных моделей динамических объектов и блок хранения информации о динамических объектах, выход блока ввода-вывода данных каждого автоматизированного рабочего места оператора подключен к первым входам блока хранения трехмерных моделей динамических объектов, блока хранения цифровой карты местности и блока хранения трехмерных моделей статических объектов, второй вход которого подключен к выходу блока формирования и корректировки моделей статических объектов, выход пульта ввода команд каждого автоматизированного рабочего места оператора соединен с входами блока формирования и корректировки моделей статических объектов и блока формирования и корректировки моделей динамических объектов, а также с входами блока поворота и наклона, блока управления источником и интенсивностью освещения, блока формирования сечений и блока формирования координат точки нахождения наблюдателя, выходы которых подключены соответственно к первому, второму, третьему и четвертому входам первого блока интеграции, выход которого соединен с первым входом устройства отображения информации соответствующего автоматизированного рабочего места оператора, пятый и шестой входы - соответственно с выходом блока хранения трехмерных моделей статических объектов и с первым выходом блока хранения цифровой карты местности, седьмой вход - с выходом пульта ввода команд соответствующего автоматизированного рабочего места оператора, восьмой и девятый входы - соответственно с выходом блока хранения трехмерных моделей динамических объектов и с первым выходом второго блока интеграции, второй выход которого подключен к второму входу устройства отображения информации соответствующего автоматизированного рабочего места оператора, первый вход второго блока интеграции соединен с вторым выходом блока хранения цифровой карты местности, второй вход которого подключен к выходу блока выбора участка местности, вход которого соединен с выходом пульта ввода команд соответствующего автоматизированного рабочего места оператора и с входами блока масштабирования и блока отбора объектов отображения по различным признакам, выходы которых подключены соответственно к второму и третьему входам второго блока интеграции, четвертый вход которого соединен с выходом пульта ввода команд соответствующего автоматизированного рабочего места оператора, пятый вход - с первым выходом блока хранения информации о динамических объектах, вход которого является входом аппаратуры сбора, обработки, преобразования и хранения информации для ввода информации от источников информации, а выход подключен к второму входу блока хранения трехмерных моделей динамических объектов, третий вход которого соединен с выходом блока формирования и корректировки моделей динамических объектов.
Предлагаемая система мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов обеспечивает реализм виртуальной искусственной среды, предъявляемой оператору, за счет создания динамических квазиобъемных информационных моделей сложной реальной обстановки путем формирования с заданной дискретностью кадров трехмерного изображения внешней среды («видеокубов») и визуализации на автоматизированных рабочих местах операторов изометрических изображений этих «видеокубов» или их вращаемых проекций (или «срезов») на координатные плоскости.
Проведенный заявителем анализ уровня техники, включая поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного технического решения, позволил установить, что заявитель не обнаружил источник, характеризующийся признаками, тождественными (идентичными) всем существенным признакам заявленного технического решения. Определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволило установить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков заявленной системы мониторинга оперативной обстановки, изложенных в формуле изобретения. Следовательно, заявленное техническое решение соответствует критерию "новизна".
Проведенный заявителем дополнительный поиск не выявил известные решения, содержащие признаки, совпадающие с отличительными от прототипа признаками заявленной системы мониторинга оперативной обстановки. Следовательно, заявленное техническое решение не вытекает для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного технического решения преобразований для достижения технического результата. Заявленное техническое решение не основано на изменении количественного признака (признаков), представлении таких признаков во взаимосвязи либо изменении ее вида. Следовательно, заявленное техническое решение соответствует критерию "изобретательский уровень".
Предлагаемая система мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов предполагает выполнение известных в системах управления операций, которые могут быть реализованы с помощью известных функциональных элементов.
Сущность заявленной системы мониторинга оперативной обстановки рассмотрим на примере системы мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления войсками, силами и средствами авиации и противовоздушной обороны.
На чертеже представлена структурная схема системы мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов.
Система мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов (см. чертеж) содержит автоматизированные рабочие места (АРМ) 1 (на чертеже показано одно АРМ 1) и аппаратуру 2 сбора, обработки, преобразования и хранения информации.
В состав АРМ 1 входят блок 3 ввода-вывода информации, пульт 4 ввода команд и устройство 5 отображения информации.
В состав аппаратуры 2 сбора, обработки, преобразования и хранения информации входят блок 6 хранения статической информации, блок 7 формирования трехмерной модели, блок 8 формирования двухмерной модели и блок 9 хранения динамической информации.
Блок 6 хранения статической информации содержит блок 10 формирования и корректировки моделей статических объектов, блок 11 хранения трехмерных моделей статических объектов и блок 12 хранения цифровой карты местности.
Блок 7 формирования трехмерной модели содержит первый блок 13 интеграции, блок 14 поворота и наклона, блок 15 управления источником и интенсивностью освещения, блок 16 формирования сечений и блок 17 формирования координат точки нахождения наблюдателя.
Блок 8 формирования двухмерной модели содержит второй блок 18 интеграции, блок 19 масштабирования, блок 20 отбора объектов отображения по различным признакам и блок 21 выбора участка местности.
Блок 9 хранения динамической информации содержит блок 22 формирования и корректировки моделей динамических объектов, блок 23 хранения трехмерных моделей динамических объектов и блок 24 хранения информации о динамических объектах.
Выход блока 3 ввода-вывода данных каждого автоматизированного рабочего места 1 оператора подключен к первым входам блока 23 хранения трехмерных моделей динамических объектов, блока 12 хранения цифровой карты местности и блока 11 хранения трехмерных моделей статических объектов, второй вход которого подключен к выходу блока 10 формирования и корректировки моделей статических объектов, выход пульта 4 ввода команд каждого автоматизированного рабочего места 1 оператора соединен с входами блока 10 формирования и корректировки моделей статических объектов и блока 22 формирования и корректировки моделей динамических объектов, а также с входами блока 14 поворота и наклона, блока 15 управления источником и интенсивностью освещения, блока 16 формирования сечений и блока 17 формирования координат точки нахождения наблюдателя, выходы которых подключены соответственно к первому, второму, третьему и четвертому входам первого блока 13 интеграции, выход которого соединен с первым входом устройства 5 отображения информации соответствующего автоматизированного рабочего места 1 оператора, пятый и шестой входы - соответственно с выходом блока 11 хранения трехмерных моделей статических объектов и с первым выходом блока 12 хранения цифровой карты местности, седьмой вход - с выходом пульта 4 ввода команд соответствующего автоматизированного рабочего места 1 оператора, восьмой и девятый входы - соответственно с выходом блока 23 хранения трехмерных моделей динамических объектов и с первым выходом второго блока 18 интеграции, второй выход которого подключен к второму входу устройства 5 отображения информации соответствующего автоматизированного рабочего места 1 оператора, первый вход второго блока 18 интеграции соединен с вторым выходом блока 12 хранения цифровой карты местности, второй вход которого подключен к выходу блока 21 выбора участка местности, вход которого соединен с выходом пульта 4 ввода команд соответствующего автоматизированного рабочего места 1 оператора и с входами блока 19 масштабирования и блока 20 отбора объектов отображения по различным признакам, выходы которых подключены соответственно к второму и третьему входам второго блока 18 интеграции, четвертый вход которого соединен с выходом пульта 4 ввода команд соответствующего автоматизированного рабочего места 1 оператора, пятый вход - с первым выходом блока 24 хранения информации о динамических объектах, вход которого является входом аппаратуры сбора, обработки, преобразования и хранения информации для ввода информации от источников информации, а выход подключен к второму входу блока 23 хранения трехмерных моделей динамических объектов, третий вход которого соединен с выходом блока 22 формирования и корректировки моделей динамических объектов.
Блок 3 ввода-вывода информации предназначен для ввода исходной статической информации, а также документирования и вывода на печать вводимой информации.
Пульт 4 ввода команд предназначен для ввода команд управления формированием трехмерной модели или его сечения, необходимых оператору, и команд корректировки моделей статических и динамических объектов.
Устройство 5 отображения информации предназначено для визуализации сформированных двухмерной и трехмерной моделей, а также для ввода информации, сопутствующей командам, вводимым с пульта ввода команд.
Блок 10 формирования и корректировки моделей статических объектов предназначен для формирования и корректировки моделей статических объектов по командам оператора.
Блок 11 хранения трехмерных моделей статических объектов предназначен для хранения совокупности введенных и откорректированных моделей статических объектов.
Блок 12 хранения цифровой карты местности предназначен для хранения информации о цифровой карте местности.
Первый блок 13 интеграции предназначен для формирования кадра трехмерной модели или кадра сечения этой модели на основе информации, поступающей из второго блока 18 интеграции, блока 14 поворота и наклона, блока 15 управления источником и интенсивностью освещения, блока 16 формирования сечений и блока 17 формирования координат точки нахождения наблюдателя.
Блок 14 поворота и наклона предназначен для осуществления по командам оператора поворота и наклона формируемой трехмерной модели.
Блок 15 управления источником и интенсивностью освещения предназначен для осуществления по командам оператора перемещения на формируемой трехмерной модели источника освещения и управления интенсивностью освещения от указанного источника.
Блок 16 формирования сечений предназначен для формирования по командам оператора вертикального сечения формируемой трехмерной модели.
Блок 17 формирования координат точки нахождения наблюдателя предназначен для отображения непросматриваемых зон местности относительно точки стояния наблюдателя.
Второй блок 18 интеграции предназначен для формирования кадра двухмерной модели на основе информации, поступающей из блока 21 выбора участка местности, блока 19 масштабирования и блока 20 отбора объектов отображения по различным признакам.
Блок 19 масштабирования предназначен для выбора по команде оператора масштаба формируемых двухмерной и трехмерной моделей.
Блок 20 отбора объектов отображения по различным признакам предназначен для селекции динамических объектов по различным признакам, вводимым оператором.
Блок 21 выбора участка местности предназначен для выбора по команде оператора на цифровой карте местности фрагмента местности для его визуализации на средстве отображения информации, а также для формирования признаков детализации выбранного фрагмента.
Блок 22 формирования и корректировки моделей динамических объектов предназначен для формирования и корректировки моделей динамических объектов по командам оператора.
Блок 23 хранения трехмерных моделей динамических объектов предназначен для хранения совокупности введенных и откорректированных трехмерных моделей динамических объектов.
Блок 24 хранения информации о динамических объектах предназначен для хранения информации о динамических объектах, которая поступает от источников информации в режиме реального времени.
Система мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов (см. чертеж) работает следующим образом.
Динамические квазиобъемные информационные модели реализованы посредством заблаговременного формирования статической обстановки, циклического формирования кадров квазиобъемной информационной модели в соответствии с темпом поступления динамически изменяющейся информации, управления положением сформированной квазиобъемной информационной модели по командам оператора и формирования (при необходимости) проекции заданного сечения квазиобъемной информационной модели на горизонтальную и вертикальную плоскости.
Предлагаемый способ построения и визуального отображения трехмерной модели выбранного участка местности и расположенных на нем объектов включает построение трехмерной модели местности по матрице высот двухмерной карты, отображение трехмерной модели каркасным способом с обеспечением возможности изменения шага сетки модели, и/или путем построения однотонной модели с тенями, и/или путем построения гипсометрической модели с обеспечением возможности соответствия цвета точек их высоте, и/или путем построения модели с наложением текстуры, и/или путем построения модели с наложением плоского отображения выбранного участка местности двухмерной карты, изменение освещенности трехмерной модели в зависимости от времени суток и/или в зависимости от изменения положения источника освещения, сохранение визуальных и пространственных параметров отображения выбранного участка местности в базе данных, создание пользовательских объектов на трехмерной модели с записью их в базу данных, изменение характеристик объектов на местности на двухмерной модели и автоматизированное отображение их на трехмерной модели.
Динамические квазиобъемные информационные модели сложной реальной обстановки реализуются в ходе выполнения трех этапов:
- подготовительных работ;
- формирования статической обстановки;
- формирования динамической обстановки.
На первом этапе (в ходе подготовительных работ) при построении и визуальном отображении трехмерной модели осуществляют построение трехмерной модели местности с использованием матрицы высот двухмерной карты, векторной карты местности, триангуляционной модели рельефа, классификатора карты, а также построение пользовательских объектов на трехмерной модели с использованием библиотеки трехмерных изображений.
Для этого с блока 3 ввода-вывода информации в блок 12 хранения цифровой карты местности вводится информация о цифровой карте местности (векторная карта местности; матрица высот; триангуляционная модель рельефа; классификатор карты), в блок 11 хранения трехмерных изображений статических объектов вводится информация об объемных изображениях статических объектов (формируется библиотека трехмерных моделей статических объектов), в блок 23 хранения трехмерных моделей динамических объектов вводится информация об объемных изображениях динамических объектов (формируется библиотека трехмерных моделей динамических объектов).
Информация об объемных изображениях статических и динамических объектов содержит общие трехмерные изображения объектов, их коды и вектора привязки к цифровой карте местности. В целях обеспечения детализации или изменения характеристик объектов предусматривается возможность редактирования объемных изображений.
В ходе редактирования с пульта 4 ввода команд в блок 10 формирования и корректировки моделей статических объектов и в блок 22 формирования и корректировки моделей динамических объектов вводятся команды формирования (корректировки) указанных объектов. По этим командам блок 10 формирования и корректировки моделей статических объектов и блок 22 формирования и корректировки моделей динамических объектов формируют управляющие воздействия, которые выдаются соответственно на блок 11 хранения трехмерных моделей статических объектов и на блок 23 хранения трехмерных моделей динамических объектов. Указанные управляющие воздействия формируют (корректируют) информацию в блоке 11 хранения трехмерных моделей статических объектов и в блоке 23 хранения трехмерных моделей динамических объектов и обеспечивают выдачу сформированной (скорректированной) информации из этих блоков на первый блок 13 интеграции и далее на устройство 5 отображения информации для контроля процесса формирования (корректировки) трехмерных моделей. Это позволяет осуществить выбор (уточнение) любых характеристик объектов (цвет, материал, отражающая и поглощающая способности и т.п.).
Для того чтобы объект на трехмерной карте выглядел реалистично, предусматривается возможность введения команд на покрытие поверхности объектов текстурами. Текстура представляет собой растровое изображение поверхности частей объекта. Формирование текстур выполняется с помощью цифровых фотографий, которые предварительно вводятся с блока 3 ввода-вывода информации в блок 11 хранения трехмерных моделей статических объектов и в блок 23 хранения трехмерных моделей динамических объектов. Слишком мелкие повторяющиеся детали (например, рельсы) по командам управления могут укрупняться.
На втором этапе построения и визуального отображения трехмерной модели (в ходе формирования статической обстановки) работают как со всем районом, отображаемым в окне двухмерной карты, так и с любым выбранным его фрагментом. При этом осуществляют управление моделью (смещение вверх, вниз, вправо, влево или поворот модели), изменение высоты и угла наблюдения модели, наклон модели вперед - назад, влево - вправо, увеличение или уменьшение масштаба отображения модели, управление положением источника освещения относительно модели, изменение интенсивности освещения (светлее, темнее), выбор объектов для редактирования и изменение трехмерного вида объектов или серии объектов.
Для этого осуществляется формирование квазиобъемной информационной модели реальной статической обстановки (трехмерной карты местности и размещенных на местности объектов) с использованием результатов, полученных в ходе предварительных работ (первого этапа).
С этой целью оператором с пульта 4 ввода команд выдаются команды управления, которые поступают на блок 21 выбора участка местности, блок 19 масштабирования, блок 20 отбора объектов отображения по различным признакам, первый блок 13 интеграции, второй блок 18 интеграции, блок 14 поворота и наклона, блок 15 управления источником и интенсивностью освещения, блок 16 формирования сечений, блок 17 формирования координат точки нахождения наблюдателя.
По этим командам блок 21 выбора участка местности выдает управляющие воздействия на блок 12 хранения цифровой карты местности, который, реализуя полученные управляющие воздействия, выдает в первый блок 13 интеграции и второй блок 18 интеграции заданный фрагмент цифровой карты местности.
Блок 19 масштабирования выдает управляющие воздействия на второй блок 18 интеграции, который формирует (с заданным масштабом и привязкой к конкретной точке местности) кадр двухмерного изображения статической обстановки.
Далее второй блок 18 интеграции транслирует команду масштабирования и координаты граничных точек кадра 2-мерного изображения статической обстановки в первый блок 13 интеграции, который формирует кадр 3-мерного изображения статической обстановки, соответствующий кадру 2-мерного изображения статической обстановки. Кадры 2-мерного и 3-мерного изображения статической обстановки отображаются на устройстве 5 отображения 8.
Блок 14 поворота и наклона выдает на первый блок 13 интеграции управляющие воздействия, с помощью которых осуществляется смещение (прокрутка) изображения статической обстановки вверх, вниз, вправо, влево или его поворот, а также изменение угла наклона наблюдения изображения статической обстановки.
Блок 17 формирования координат точки нахождения наблюдателя выдает на первый блок 13 интеграции управляющие воздействия, с помощью которых осуществляется построение непросматриваемых зон местности относительно точки стояния наблюдателя, координаты которой задаются оператором с пульта ввода команд 4.
На основе управляющих команд, поступающих из блока 17 формирования координат точки нахождения наблюдателя, первый блок 13 интеграции осуществляет построение непросматриваемых зон местности относительно точки стояния наблюдателя и выдает их на устройство 5 отображения информации.
Блок 15 управления источником и интенсивностью освещения выдает на первый блок 13 интеграции управляющие воздействия, с помощью которых осуществляется перемещение источника освещения на формируемой в первом блоке 13 интеграции трехмерной модели и управление интенсивностью освещения от указанного источника. При этом возможна автоматическая выдача управляющих воздействий, привязанная к календарному времени и времени суток.
Блок 16 формирования сечений выдает на первый блок 13 интеграции управляющие воздействия, с помощью которых осуществляется построение вертикального сечения формируемой трехмерной модели, координаты которого задаются оператором с помощью пульта ввода команд 4.
На основе управляющих команд, поступающих из блока 16 формирования сечений, первый блок 13 интеграции формирует заданное сечение трехмерной модели на вертикальную плоскость, которое затем отображается на устройстве 5 отображения информации.
Второй блок 18 интеграции с учетом полученных управляющих воздействий формирует двухмерную модель реальной статической обстановки и выдает ее на устройство 5 отображения информации.
Первый блок 13 интеграции с учетом полученных управляющих воздействий формирует трехмерную модель реальной статической обстановки и выдает ее на устройство 5 отображения информации.
На третьем этапе построения и визуального отображения трехмерной модели (в ходе формирования динамической обстановки) осуществляют отображение объектов на поверхности (над поверхностью) по динамически изменяемым координатным данным. При этом отображают все объекты, присутствующие в момент выбора участка карты в ее списке отображения, трехмерные изображения которых имеются в библиотеке трехмерных изображений.
Для этого от источников информации в блок 24 хранения информации о динамических объектах поступает информация о динамических объектах (координаты, тип объекта, скорость объекта и т.п.).
Указанная информация из блока 24 хранения информации о динамических объектах поступает в блок 23 хранения трехмерных моделей динамических объектов и во второй блок 18 интеграции. Второй блок 18 интеграции транслирует полученную информацию в первый блок 13 интеграции и формирует двухмерный кадр динамической обстановки на фоне статической обстановки.
Блок 23 хранения трехмерных моделей динамических объектов на основе полученной информации выдает в первый блок 13 интеграции трехмерную модель, соответствующую типу динамического объекта, по которому пришла информация. Первый блок 13 интеграции формирует трехмерный кадр динамической обстановки на фоне статической обстановки или заданное сечение этого кадра.
С пульта 4 ввода команд в блок 20 отбора объектов отображения по различным признакам оператором могут вводиться команды селекции объектов (по высоте, скорости, типу объекта и т.п.). В соответствии с полученными командами блок 20 отбора объектов отображения по различным признакам выдает на второй блок 18 интеграции управляющие воздействия, с помощью которых во втором блоке 18 интеграции при формировании двухмерного кадра динамической обстановки осуществляется селекция динамических объектов по различным признакам, введенным оператором. Полученные команды селекции второй блок 18 интеграции транслирует в первый блок 13 интеграции, где при формировании трехмерного кадра динамической обстановки осуществляется селекция динамических объектов по различным признакам, введенным оператором.
Изложенные выше сведения свидетельствуют о выполнении при использовании заявленного технического решения следующей совокупности условий:
- средства, воплощающие заявленную систему мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов при ее осуществлении, предназначены для использования в промышленности, а именно в системах контроля и управления радиоэлектронными средствами военных объектов;
- для заявленной системы мониторинга оперативной обстановки для ее реализации в том виде, как она охарактеризована в изложенной формуле изобретения, подтверждена возможность ее осуществления с помощью описанных в заявке или известных до даты приоритета средств и методов.
Следовательно, заявленное техническое решение соответствует критерию "промышленная применимость".
При использовании заявленной системы мониторинга оперативной обстановки достигается возможность формировать квазиобъемные информационные модели, которые позволяют оперативно (с одного взгляда) оценивать местоположение воздушных объектов в пространстве по трем координатам (относительно друг друга, а также относительно возвышенностей и высотных объектов, зон обнаружения радиолокационных средств, зон огня зенитных ракетных комплексов, областей уничтожения средств нападения воздушного противника истребительной авиацией и т.п.) и уточнять местоположение этих объектов на двумерных информационных моделях, формируемых на основе проекций сечений «видеокуба» на горизонтальную и вертикальную плоскости.
Динамические квазиобъемные информационные модели сложной реальной обстановки, формируемые на автоматизированных рабочих местах комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов, позволяют наиболее адекватно отображать текущую наземную и воздушную обстановку, что, в свою очередь, позволяет с высокой оперативностью и качеством решать задачи:
- оценки воздушной обстановки;
- вскрытия замысла действий сил и средств воздушного нападения противника;
- оценки боевых возможностей сил и средств противовоздушной обороны;
- обеспечения безопасности полетов авиации, в том числе с учетом динамики метеорологической обстановки, сложного рельефа местности и др.
Литература
1. Справочник офицера противовоздушной обороны / Под ред. Г.В.Зимина. - М.: Воениздат, 1981, стр.374-376, 379-383.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТА И РЕГИСТРАЦИИ ЕГО СОСТОЯНИЯ | 2011 |
|
RU2444055C1 |
| ИНТЕРАКТИВНЫЙ ГЕОИНФОРМАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2571784C1 |
| СРЕДСТВО ЦВЕТОВОЙ ИДЕНТИФИКАЦИИ СОСТОЯНИЯ СИСТЕМЫ | 2023 |
|
RU2824435C1 |
| Способ обработки результатов радиомониторинга | 2017 |
|
RU2659486C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ТРЕХУРОВНЕВОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СРЕДСТВАМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2461859C2 |
| АВТОМАТИЗИРОВАННЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2398285C2 |
| СПОСОБ АДАПТИВНОГО ГРУППОВОГО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМИ КОМПЛЕКСАМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2758870C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ТОПОГЕОДЕЗИЧЕСКОЙ ИНФОРМАЦИИ НА ОСНОВЕ ЦИФРОВЫХ КАРТ МЕСТНОСТИ (ЦКМ) | 2011 |
|
RU2452000C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
Изобретение относится к комплексам средств автоматизации. Технический результат заключается в формировании на рабочих местах операторов динамических квазиобъемных информационных моделей сложной реальной обстановки. Он достигается тем, что система содержит автоматизированные рабочие места, в состав каждого из которых входят блок ввода-вывода информации, пульт ввода команд и устройство отображения информации, и аппаратуру сбора, обработки, преобразования и хранения информации, в состав которой входят блок хранения статической информации, блок формирования трехмерной модели, блок формирования двухмерной модели и блок хранения динамической информации. Блок хранения статической информации содержит блок формирования и корректировки моделей статических объектов, блок хранения трехмерных моделей статических объектов и блок хранения цифровой карты местности. Блок формирования трехмерной модели содержит первый блок интеграции, блок поворота и наклона, блок управления источником и интенсивностью освещения, блок формирования сечений и блок формирования координат точки нахождения наблюдателя. Блок формирования двухмерной модели содержит второй блок интеграции, блок масштабирования, блок отбора объектов отображения по различным признакам и блок выбора участка местности. Блок хранения динамической информации содержит блок формирования и корректировки моделей динамических объектов, блок хранения трехмерных моделей динамических объектов и блок хранения информации о динамических объектах. 1 ил.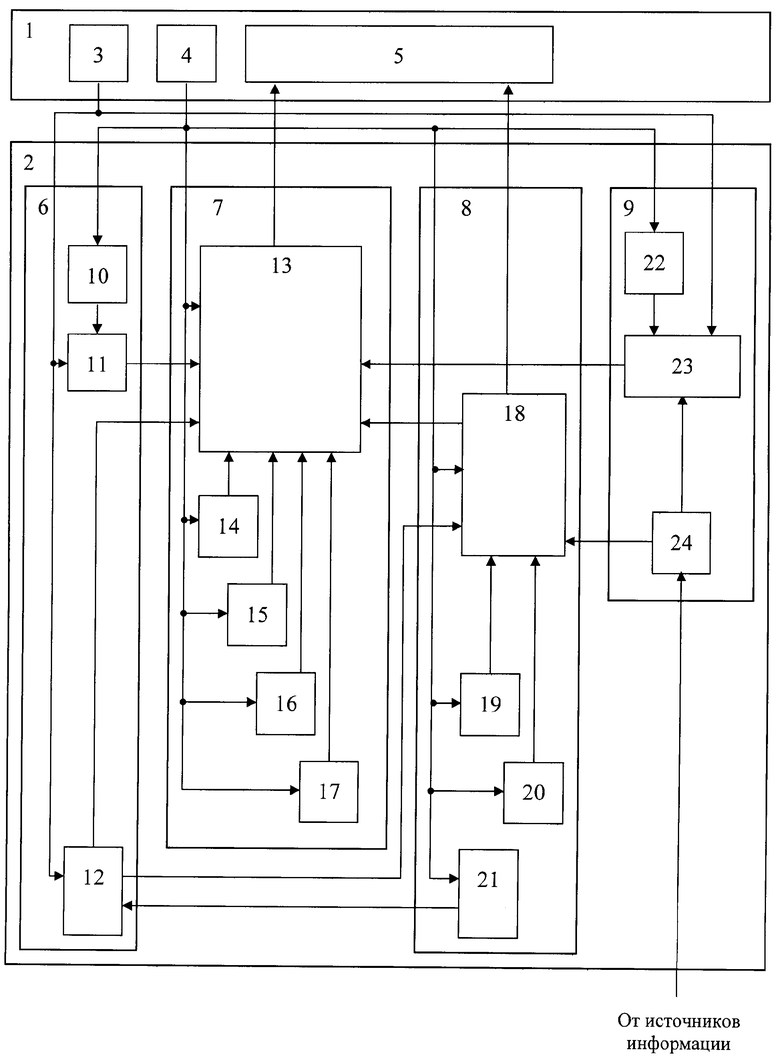
Система мониторинга оперативной обстановки в составе комплекса средств автоматизации автоматизированной системы управления радиоэлектронными средствами военных объектов, содержащая аппаратуру сбора, обработки, преобразования и хранения информации, имеющую вход для ввода информации от источников информации, а также аппаратуру отображения информации и ввода-вывода данных, включающую на каждом рабочем месте устройство отображения информации, пульт ввода команд и блок ввода-вывода данных, отличающаяся тем, что введены блок хранения статической информации, блок формирования трехмерной модели, блок формирования двухмерной модели и блок хранения динамической информации, включенные в состав аппаратуры сбора, обработки, преобразования и хранения информации, при этом аппаратура отображения информации и ввода-вывода данных на каждом рабочем месте выполнена в виде автоматизированного рабочего места оператора, блок хранения статической информации содержит блок формирования и корректировки моделей статических объектов, блок хранения трехмерных моделей статических объектов и блок хранения цифровой карты местности, блок формирования трехмерной модели содержит первый блок интеграции, блок поворота и наклона, блок управления источником и интенсивностью освещения, блок формирования сечений и блок формирования координат точки нахождения наблюдателя, блок формирования двухмерной модели содержит второй блок интеграции, блок масштабирования, блок отбора объектов отображения по различным признакам и блок выбора участка местности, блок хранения динамической информации содержит блок формирования и корректировки моделей динамических объектов, блок хранения трехмерных моделей динамических объектов и блок хранения информации о динамических объектах, выход блока ввода-вывода данных каждого автоматизированного рабочего места оператора подключен к первым входам блока хранения трехмерных моделей динамических объектов, блока хранения цифровой карты местности и блока хранения трехмерных моделей статических объектов, второй вход которого подключен к выходу блока формирования и корректировки моделей статических объектов, выход пульта ввода команд каждого автоматизированного рабочего места оператора соединен с входами блока формирования и корректировки моделей статических объектов и блока формирования и корректировки моделей динамических объектов, а также с входами блока поворота и наклона, блока управления источником и интенсивностью освещения, блока формирования сечений и блока формирования координат точки нахождения наблюдателя, выходы которых подключены соответственно к первому, второму, третьему и четвертому входам первого блока интеграции, выход которого соединен с первым входом устройства отображения информации соответствующего автоматизированного рабочего места оператора, пятый и шестой входы - соответственно с выходом блока хранения трехмерных моделей статических объектов и с первым выходом блока хранения цифровой карты местности, седьмой вход - с выходом пульта ввода команд соответствующего автоматизированного рабочего места оператора, восьмой и девятый входы - соответственно с выходом блока хранения трехмерных моделей динамических объектов и с первым выходом второго блока интеграции, второй выход которого подключен к второму входу устройства отображения информации соответствующего автоматизированного рабочего места оператора, первый вход второго блока интеграции соединен с вторым выходом блока хранения цифровой карты местности, второй вход которого подключен к выходу блока выбора участка местности, вход которого соединен с выходом пульта ввода команд соответствующего автоматизированного рабочего места оператора и с входами блока масштабирования и блока отбора объектов отображения по различным признакам, выходы которых подключены соответственно к второму и третьему входам второго блока интеграции, четвертый вход которого соединен с выходом пульта ввода команд соответствующего автоматизированного рабочего места оператора, пятый вход - с первым выходом блока хранения информации о динамических объектах, вход которого является входом аппаратуры сбора, обработки, преобразования и хранения информации для ввода информации от источников информации, а выход подключен к второму входу блока хранения трехмерных моделей динамических объектов, третий вход которого соединен с выходом блока формирования и корректировки моделей динамических объектов.
| Справочник офицера противовоздушной обороны | |||
| Под ред | |||
| Г.В.Зимина | |||
| - М.: Воениздат, 1981 | |||
| Комбинированная рекуперативная коксовальная печь | 1938 |
|
SU54427A1 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ ПРОЦЕССА РАЗРАБОТКИ ОБЪЕКТОВ ВОЕННОЙ ТЕХНИКИ | 2004 |
|
RU2282243C2 |
| JP 2004070475 A, 04.03.2004. | |||

