Изобретение относится к электрогидравлическим автоматическим системам, широко применяемым в различных отраслях техники. Это системы управления летательных аппаратов, испытательное оборудование в авиационной и в автомобильной промышленностях, автоматизированные прокатные станы и системы непрерывной разливки металлов, автоматизированные системы поиска нефти и газа и целый ряд других применений. Главным элементом таких систем является электрогидравлический следящий привод дроссельного или объемного регулирования с различными типами двухкаскадных электрогидравлических усилителей мощности (ЭГУ), различающихся по типу гидрораспределителя (ГР), управляемого электромеханическим преобразователем (ЭМП) и по типу обратной связи от ГР второго каскада.
В качестве примеров можно привести: двухкаскадный ЭГУ «сопло-заслонка» с синхронизирующими пружинами на втором каскаде [«Проектирование следящих электрогидравлических приводов летательных аппаратов». Под редакцией Н.С.Гамынина / М., «Машиностроение». 1981 г., 312 с. (рис.1.1)] и с механической обратной связью от ГР второго каскада на ЭМП (там же, рис.1.4); двухкаскадный ЭГУ с ГР первого каскада «струйная трубка» с механической обратной связью (там же, рис.1.2) и с гидравлической позиционной обратной связью (там же, рис.1.3); двухкаскадный ЭГУ с ГР первого каскада в виде плоского золотника на упругом подвесе [Разинцев В.И. «Электрогидравлические усилители мощности». / М., «Машиностроение». 1980 г., 120 с.], с гидравлической позиционной обратной связью (рис.21), с механической обратной связью (рис.25) и с электрической обратной связью (рис.27). В последней работе показано, что наилучшими статическими, динамическими и энергетическими характеристиками среди упомянутых выше ЭГУ, при одинаковых ЭМП, давлении нагнетания и расходе рабочей жидкости на входе ЭГУ, обладает ЭГУ с плоским золотником на упругом подвесе и с электрической обратной связью. Поэтому в качестве ЭГУ-прототипа будем рассматривать такой ЭГУ, принципиальная схема которого приведена на рис.27 в вышеупомянутой книге.
ЭГУ - прототип содержит:
- первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал (uупр), а другой вход, через согласующую аппаратуру, соединен с сигнальной обмоткой электрического датчика обратной связи;
- электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя;
- электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя первого каскада;
- гидрораспределитель первого каскада, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя второго каскада;
- гидрораспределитель второго каскада, кинематически связанный с подвижным элементом электрического датчика обратной связи и гидравлически соединенный с гидролиниями нагнетания и слива;
- согласующую аппаратуру электрического датчика обратной связи.
Недостатками рассмотренного ЭГУ являются:
1. Зависимость коэффициента усиления по скорости ГР2 от нагрузки на нем, от изменения величин давлений нагнетания и слива, от изменения температуры рабочей жидкости и от допусков на коэффициенты усиления ЭУМ, ЭМП, ГР1, что ухудшает статические и динамические характеристики ЭГУ и снижает КПД его гидравлической части.
2. Малая величина перекрытий по рабочим кромкам гидрораспределителей первого и второго каскадов, обусловленная необходимостью обеспечить заданную зону нечувствительности расходной характеристики ЭГУ, что приводит к увеличению утечек.
Уменьшение перекрытий ГР2 обусловлено и необходимостью уменьшения диапазона изменения величины управляющего сигнала на входе в ЭГУ, в пределах которого, за счет перекрытий, уменьшается коэффициент усиления по расходу, распределяемого ЭГУ при малых амплитудах управляющего сигнала и при малых частотах этого сигнала (Фомичев В.М. «Повышение характеристик золотниковых гидрораспределителей в области «нуля». / »Гидравлика и пневматика», №20 (05). 2006 г.).
3. Ограничение коэффициента усиления контура ЭГУ и соответствующее ухудшение его статических и динамических характеристик из-за резонансного пика на амплитудной частотной характеристике малодемпфированного механического звена первого каскада.
Технической задачей предлагаемого изобретения является устранение указанных недостатков. Поставленная задача решается тем, что заявленный двухкаскадный электрогидравлический усилитель мощности содержит:
- первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал, а другой вход, через согласующую аппаратуру, соединен с сигнальной обмоткой электрического датчика обратной связи;
- электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя;
- электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя первого каскада;
- гидрораспределитель первого каскада, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя второго каскада;
- гидрораспределитель второго каскада, кинематически связанный с подвижным элементом электрического датчика обратной связи и гидравлически соединенный с гидролиниями нагнетания и слива;
- согласующую аппаратуру электрического датчика обратной связи,
при этом согласно изобретению:
- на выходе первого суммирующего операционного усилителя установлено первое электронное корректирующее устройство, передаточная функция которого имеет следующий вид:

где: u1 - выходной сигнал первого электронного корректирующего устройства;
Δu1 - входной сигнал первого электронного корректирующего устройства,
Δu1=uвх-uoc1;
uвх - управляющий сигнал на входе суммирующего операционного усилителя;
uoc1 - выходной сигнал согласующей аппаратуры;
Тк1, Тк2 и Тк3 - постоянные времени передаточной функции WKУ1(s);
Тк1=(2÷4)Тcp.
Постоянная времени Тср определяется по соотношению  ,
,
ωcp - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура двухкаскадного электрогидравлического усилителя мощности пересекает ось частот:
Тк2=(2÷4)Тк1;
 ;
;
fраб - частота, в пределах которой нормируются динамические характеристики двухкаскадного электрогидравлического усилителя мощности;
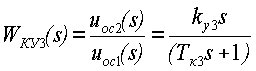
- выход первого электронного корректирующего устройства соединен с одним из входов второго суммирующего операционного усилителя, второй вход которого соединен с выходом третьего электронного корректирующего устройства, вход которого соединен с выходом согласующей аппаратуры и передаточная функция которого имеет следующий вид:
 ,
,
где: uoc2(s) - выходной сигнал третьего электронного корректирующего устройства;
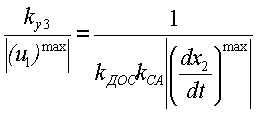
kу3 определяется по соотношению:
 ,
,
где: (u1)max - максимальное значение выходной координаты первого электронного корректирующего устройства;
 - максимальная скорость холостого хода (без нагрузки) выходной координаты двухкаскадного электрогидравлического усилителя мощности при номинальных значениях давлений нагнетания и слива, при нормальной температуре рабочей жидкости и при номинальных значениях коэффициентов усиления электронного усилителя мощности, электромеханического преобразователя, гидрораспределителя первого каскада;
- максимальная скорость холостого хода (без нагрузки) выходной координаты двухкаскадного электрогидравлического усилителя мощности при номинальных значениях давлений нагнетания и слива, при нормальной температуре рабочей жидкости и при номинальных значениях коэффициентов усиления электронного усилителя мощности, электромеханического преобразователя, гидрораспределителя первого каскада;
kДОС - коэффициент передачи электрического датчика обратной связи;
kСА - коэффициент передачи согласующей аппаратуры,
kДОСkСА [В/см];
kу3 - коэффициент усиления третьего электронного корректирующего устройства,
kу3[c];
- выход второго суммирующего операционного усилителя,
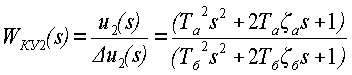
Δu2=u1 - uoc2, соединен со входом второго электронного корректирующего устройства, передаточная функция которого, WКУ2(s), может выполняться в двух вариантах:
а) первый вариант -
 ,
,
где: u2 - выходной сигнал второго электронного корректирующего устройства;
Та и ζа - постоянная времени и относительный коэффициент демпфирования колебательного звена механической части гидрораспределителя первого каскада;
Тб=(0,2÷1,0)Та; ζб=(5÷30)ζа;
б) второй вариант -
 ,
,
где: ТК4=(3÷5)Та;
- выход второго электронного корректирующего устройства соединен со входом электронного усилителя мощности.
Сущность заявленного изобретения поясняется чертежом, на котором представлена принципиальная электрогидравлическая схема усовершенствованного ЭГУ, который содержит:
- первый суммирующий операционный усилитель (СОУ1) (1), на один вход которого поступает управляющий сигнал (uвх), а другой вход, через согласующую аппаратуру СА (11), соединен с сигнальной обмоткой датчика обратной связи ДОС (10);
- первое электронное корректирующее устройство КУ1 (2), вход которого соединен с выходом СОУ1 (1) - Δu1 (Δu1=uвх-uoc1), где uoc1 - сигнал на выходе СА(11);
- второй суммирующий операционный усилитель СОУ2 (3), один вход которого соединен с выходом КУ1 (2) - u1, а другой вход соединен с выходом третьего электронного корректирующего устройства КУ3 (9) - uoc2;
- второе электронное корректирующее устройство КУ2 (4), вход которого соединен с выходом СОУ2 (3) - Δu2 (Δu2=u1-uoc2);
- третье электронное корректирующее устройство КУ3 (9), входом которого является выход СА (11) - uoc1;
- электронный усилитель мощности ЭУМ (5), вход которого соединен с выходом СОУ2 (3), а выход соединен с управляющей обмоткой ЭМП (6);
- электромеханический преобразователь ЭМП (6), якорь которого кинематически связан с подвижным элементом гидрораспределителя первого каскада ГР1 (7);
- гидрораспределитель первого каскада, ГР1 (7), гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии соединенный с управляющими полостями гидрораспределителя второго каскада ГР2 (8);
- гидрораспределитель второго каскада ГР2 (8), кинематически связанный с подвижным элементом ДОС (10) и гидравлически соединенный с гидролиниями нагнетания и слива;
- согласующую аппаратуру СА (11), вход которой соединен с сигнальной обмоткой электрического датчика обратной связи ДОС (10).
Усовершенствованный ЭГУ работает следующим образом.
Входной управляющий сигнал (uвх) поступает на один из входов первого суммирующего операционного усилителя (СОУ1) (1), где он алгебраически суммируется с сигналом обратной связи (uос1), поступающим на другой вход СОУ1 (1) с сигнальной обмотки датчика обратной связи (ДОС) (10) через согласующую аппаратуру (СА) (11). Таким образом, формируется внешний контур ЭГУ, обеспечивающий следящий режим работы ЭГУ по выходной координате (x2) - соответствие модуля и знака этой координаты модулю и знаку управляющего сигнала (uвх). Выход СОУ1 (1) - Δu1 (Δu1=uвх - uoc1) соединен с входом первого электронного корректирующего устройства (КУ1) (2), передаточная функция которого, WКУ1(s), имеет следующий вид:
 ,
,
где: Тк1 и Тк2 - постоянные времени интегро-дифференцирующей составляющей
WКУ1(s), обеспечивающей повышение коэффициента усиления в цепи ошибки внешнего контура ЭГУ в определенной полосе частот, что позволяет уменьшить зону нечувствительности ЭГУ при величине перекрытий гидрораспределителя первого каскада, обеспечивающих малые утечки этого гидрораспределителя:

 - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура ЭГУ пересекает ось частот.
- частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура ЭГУ пересекает ось частот.
Тк2=(2÷4)Тк1;
fраб - частота, в пределах которой нормируются динамические характеристики ЭГУ.
Интегрирующее звено с постоянной времени Tк3 введено в структуру WКУ1(s) для компенсации дифференцирующего эффекта звена с передаточной функцией (Tк3s+1) в цепи ошибки внешнего контура ЭГУ, которое обусловлено замыканием внутреннего контура ЭГУ через передаточную функцию третьего электронного корректирующего устройства КУ3 (9) (см. ниже).
Выход КУ1 (2) - u1 соединен с одним из входов второго суммирующего операционного усилителя (СОУ2) (3), другой вход которого соединен с выходом КУ3 (9) - uос2. Третье электронное корректирующее устройство КУ3 (9), вход которого соединен с выходом СА (11)) - uoc1, позволяет обеспечить инвариантность коэффициента усиления по скорости ГР2 (8) к нагрузке на нем, к изменению величин давлений нагнетания и слива, к изменению температуры рабочей жидкости и к допускам на коэффициенты усиления ЭУМ (5), ЭМП (6), ГР1 (7), а также повысить КПД ЭГУ. Передаточная функция КУ3, WКУ3(s), имеет следующий вид:
,
где: uoc2(s) - выходной сигнал КУ3(9);
kу2 определяется по соотношению:
,
где: (u1)max - максимальное значение выходной координаты КУ1(2);
- максимальная скорость холостого хода (без нагрузки) выходной координаты ЭГУ при номинальных значениях давлений нагнетания и слива, при нормальной температуре рабочей жидкости и при номинальных значениях коэффициентов усиления ЭУМ (5), ЭМП (6), ГР1 (7);
kДОС - коэффициент передачи ДОС(10);
kСА - коэффициент передачи СА(11);
kДОСkСА [В/см];
kу3 - коэффициент усиления третьего электронного корректирующего устройства,
kу3[c].
На выходе СОУ2 (3) установлено второе электронное корректирующее устройство (КУ2) (4), предназначенное для компенсации резонансного пика на амплитудной частотной характеристике малодемпфированного механического звена первого каскада - якорь ЭМП (6) и подвижный элемент ГР1 (7) на пружинном подвесе.
Передаточная функция КУ2 (4), WКУ2(s), может выполняться в двух вариантах:
а) первый вариант -
 ,
,
где: u2 - выходной сигнал КУ2 (4);
Δu2=u1-uос2;
Tа и ζа - постоянная времени и относительный коэффициент демпфирования колебательного звена механической части первого каскада;
Tб=(0,2÷1,0)Ta; ζб=(5÷30)ζa;
б) второй вариант -
 ,
,
где: TК4=(3÷5)Tа.
Вариант реализации КУ2 (4) выбирает разработчик ЭГУ при формировании внутреннего контура (контура обратной связи по скорости выходной координаты ЭГУ - х2) в зависимости от требуемых статических и динамических характеристик ЭГУ и при конкретных значениях Tа и ζа.
Выход КУ2 (4) - u2 соединен с входом электронного усилителя мощности ЭУМ (5), выход которого соединен с управляющей обмоткой ЭМП (6); якорь ЭМП (6) кинематически связан с подвижным элементом гидрораспределителя первого каскада ГР1 (7). Пропорционально модулю и знаку напряжения (u3) на выходе ЭУМ (5) в управляющей обмотке ЭМП (6) возникает ток управления, определяющий величину и знак управляющего момента на валу ЭМП (6). Под действием этого момента подвижный элемент ГР1 (7) (рамка плоского золотника) отклоняется от своего нейтрального положения. В результате в управляющих полостях ГР2 (8) возникает перепад давлений, под действием которого ГР2 (8) смещается от своего нейтрального положения, предопределяя при этом смещение от исходного положения подвижного элемента ДОС (10), что обуславливает изменение (от исходного значения) сигнала обратной связи (uос1), поступающего одновременно на один из входов СОУ1 (1) и на вход третьего электронного корректирующего устройства КУ3 (9).
В итоге имеем:
1. Улучшение статических, динамических и энергетических характеристик. ЭГУ за счет введения обратной связи по скорости выходной координаты ЭГУ и, как следствие реализации инвариантности коэффициента усиления по скорости этой координаты к нагрузке на ГР2, к изменению величин давлений нагнетания и слива, к изменению температуры рабочей жидкости и к допускам на коэффициенты усиления ЭУМ, ЭМП и ГР1.
2. Уменьшение утечек на гидрораспределителе первого каскада за счет увеличения перекрытий этого гидрораспределителя без увеличения зоны нечувствительности ЭГУ за счет введения в цепь ошибки контура ЭГУ интегро-дифференцирующего звена.
3. Улучшение статических и динамических характеристик ЭГУ за счет введения в цепь ошибки внутреннего контура ЭГУ электронного корректирующего устройства, компенсирующего резонансный пик малодемпфированного механического звена первого каскада, что позволяет увеличить коэффициент усиления внутреннего контура ЭГУ.
Отметим, что повышение эффективности ЭГУ, полученное за счет усовершенствования его электронной схемы, будет иметь место и в случае применения двухкаскадных ЭГУ с электрической обратной связью с другими гидрораспределителями первого каскада.
Усилитель мощности предназначен для электрогидравлических автоматических систем управления летательных аппаратов. Усилитель мощности содержит первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал, а другой вход, через согласующую аппаратуру, соединен с сигнальной обмоткой электрического датчика обратной связи; электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя; гидрораспределитель первого каскада, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя второго каскада. На выходе первого суммирующего операционного усилителя установлено первое электронное корректирующее устройство, выход первого электронного корректирующего устройства соединен с одним из входов второго суммирующего операционного усилителя, второй вход которого соединен с выходом третьего электронного корректирующего устройства, вход которого соединен с выходом согласующей аппаратуры, выход второго электронного корректирующего устройства соединен со входом электронного усилителя мощности. Технический результат - улучшение статических, динамических и энергетических характеристик гидроусилителя. 1 ил.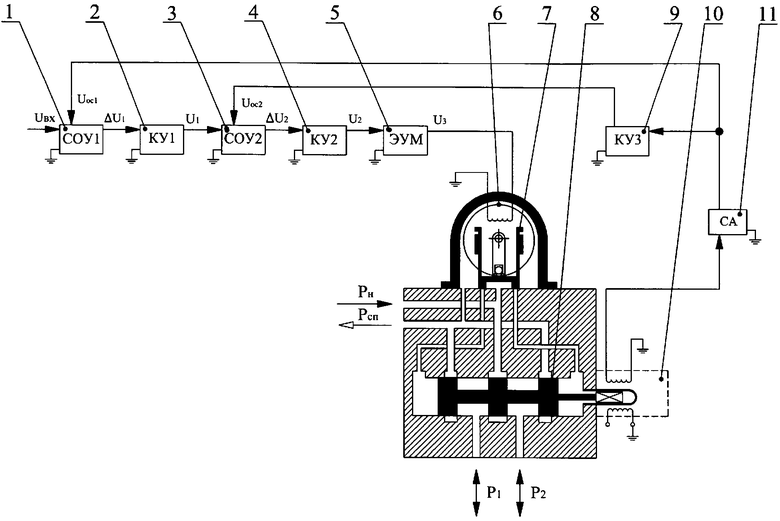
Двухкаскадный электрогидравлический усилитель мощности с электрической обратной связью, содержащий:
первый суммирующий операционный усилитель, на один вход которого подается вправляющий сигнал, а другой вход, через согласующую аппаратуру, соединен с сигнальной обмоткой электрического датчика обратной связи;
электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя;
электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя первого каскада;
гидрораспределитель первого каскада, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя второго каскада;
гидрораспределитель второго каскада, кинематически связанный с подвижным элементом электрического датчика обратной связи и гидравлически соединенный с гидролиниями нагнетания и слива;
согласующую аппаратуру, вход которой соединен с сигнальной обмоткой электрического датчика обратной связи, отличающийся тем, что
на выходе первого суммирующего операционного усилителя установлено первое электронное корректирующее устройство, передаточная функция которого имеет следующий вид:
 ,
,
где u1 - выходной сигнал первого электронного корректирующего устройства;
Δu1 - входной сигнал первого электронного корректирующего устройства,
Δu1=uвх-uoc1;
uвх - управляющий сигнал на входе суммирующего операционного усилителя;
uoc1 - выходной сигнал согласующей аппаратуры;
Тк1, Тк2 и Тк3 - постоянные времени передаточной функции WKV1(s);
Тк1=(2÷4)Тcp;
постоянная времени Тcp определяется по соотношению:  ,
,
ωср - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура двухкаскадного электрогидравлического усилителя мощности пересекает ось частот;
Тк2=(2÷4)Тк1;
 ;
;
fраб - частота, в пределах которой нормируются динамические характеристики двухкаскадного электрогидравлического усилителя мощности,
выход первого электронного корректирующего устройства соединен с одним из входов второго суммирующего операционного усилителя, второй вход которого соединен с выходом третьего электронного корректирующего устройства, вход которого соединен с выходом согласующей аппаратуры, и передаточная функция которого имеет следующий вид:
 ,
,
где uoc2(s) - выходной сигнал третьего электронного корректирующего устройства;
kу3 определяется по соотношению:
 ,
,
где (u1)max - максимальное значение выходной координаты первого электронного корректирующего устройства;
 - максимальная скорость холостого хода (без нагрузки) выходной координаты двухкаскадного электрогидравлического усилителя мощности при номинальных значениях давлений нагнетания и слива, при нормальной температуре рабочей жидкости и при номинальных значениях коэффициентов усиления электронного усилителя мощности, электромеханического преобразователя, гидрораспределителя первого каскада;
- максимальная скорость холостого хода (без нагрузки) выходной координаты двухкаскадного электрогидравлического усилителя мощности при номинальных значениях давлений нагнетания и слива, при нормальной температуре рабочей жидкости и при номинальных значениях коэффициентов усиления электронного усилителя мощности, электромеханического преобразователя, гидрораспределителя первого каскада;
kДОС - коэффициент передачи электрического датчика обратной связи;
kСА - коэффициент передачи согласующей аппаратуры,
kДОСkСА [В/см];
kу3 - коэффициент усиления третьего электронного корректирующего устройства,
kу3[c],
выход второго суммирующего операционного усилителя, Δu2=u1-uoc2, соединен с входом второго электронного корректирующего устройства, передаточная функция которого, WКУ2(s), может выполняться в двух вариантах:
а) первый вариант -
 ,
,
где u2 - выходной сигнал второго электронного корректирующего устройства;
Та и ζа - постоянная времени и относительный коэффициент демпфирования колебательного звена механической части гидрораспределителя первого каскада;
ТБ=(0,2÷1,0)ТА; ζБ=(5÷30)ζА;
б) второй вариант -
 ,
,
где ТК4=(3÷5)Та;
выход второго электронного корректирующего устройства соединен со входом электронного усилителя мощности.
| РАЗИНЦЕВ В.И | |||
| Электрогидравлические усилители мощности | |||
| - М.: Машиностроение, 1980, с.69, рис.27 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2183293C2 |
| US 3680589 A, 01.08.1972 | |||
| US 3766943 A, 23.10.1973. | |||

