Изобретение относится к области машиностроения, а именно к электрогидравлическим автоматическим системам, широко применяемым в различных отраслях техники, где требуется быстродействующий электрогидравлический привод (ЭГСП) дроссельного регулирования небольшой мощности (не более 1,5÷2 кВт). Это приводы систем управления беспилотных летательных аппаратов, приводы механизмов управления мощных гидромашин, приводы систем регулирования гидравлических и газовых турбин и ряд других применений. В качестве электрогидравлических усилителей мощности (ЭГУ) в таких приводах используются однокаскадные ЭГУ с золотниковыми гидрораспределителями (ГР) двух видов - с цилиндрическим золотником и с плоским золотником на упругом подвесе (ПЗ). Последний золотник обладает рядом преимуществ (технологичность, гарантированный зазор, отсутствие трения) (см. Разинцев В.И. «Электрогидравлические усилители мощности» М., «Машиностроение», 1980 г.).
Принципиальная схема однокаскадного ЭГУ с ГР в виде ПЗ изображена на рис.10 в вышеуказанной работе. В качестве прототипа будем рассматривать ЭГСП с однокаскадным ЭГУ с ГР в виде ПЗ и с исполнительным механизмом в виде гидроцилиндра (ГЦ) с электрическим датчиком обратной связи (ДОС) совместно с набором стандартной электронной аппаратуры, необходимой для реализации следящего режима работы привода.
ЭГСП-прототип содержит:
- первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал, а другой вход через согласующую аппаратуру соединен с сигнальной обмоткой электрического датчика обратной связи гидроцилиндра;
- электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя;
- электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя;
- регулировочный узел, кинематически связанный с якорем электромеханического преобразователя;
- гидрораспределитель, гидравлически соединенный с гидролиниями нагнетания и слива и через две гидролинии гидравлически соединенный с рабочими полостями гидроцилиндра;
- гидроцилиндр, шток которого кинематически связан с подвижным элементом электрического датчика обратной связи гидроцилиндра;
- согласующую аппаратуру электрического датчика обратной связи гидроцилиндра.
Недостатками вышеописанного ЭГСП являются:
1. Необходимость в регулировке коэффициента усиления по цепи управления от тока в обмотках электромеханического преобразователя (ЭМП) до координаты ГР из-за допусков моментной характеристики ЭМП и допусков на жесткость упругого подвеса ПЗ. Эта регулировка реализуется с помощью регулировочного узла (см. рис.10 в вышеуказанной книге).
2. Зависимость коэффициента усиления по скорости выходного звена ЭГСП (штока ГЦ) от величин давлений нагнетания и слива, от нагрузки на выходном звене исполнительного механизма ЭГСП и от температуры рабочей жидкости, что ухудшает статические и динамические характеристики ЭГСП.
3. Большой непроизводительный расход рабочей жидкости (до 40% от максимального расхода) из-за малых перекрытий по рабочим кромкам ПЗ, что обусловлено необходимостью обеспечить:
- малую зону нечувствительности скоростной характеристики ЭГСП;
- малую зону скоростной характеристики, в пределах которой из-за перекрытий ГР уменьшается коэффициент усиления в цепи ошибки контура привода при малых амплитудах управляющего сигнала и на малых частотах работы ЭГСП, что ухудшает его статические и динамические характеристики (Фомичев В.М. «Повышение характеристик золотниковых гидрораспределителей в области «нуля»» «Гидравлика и пневматика» №30(05) 2006 г.).
4. Сложность конструктивной реализации ограничения максимальной скорости выходного звена исполнительного механизма ЭГСП с помощью механических или гидравлических устройств. Указанное ограничение требуется в ряде автоматизированных систем управления (например, в системах управления летательными аппаратами).
Технической задачей предлагаемого изобретения является устранение указанных недостатков. Поставленная задача решается тем, что заявленный следящий привод содержит:
- первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал, а другой вход через согласующую аппаратуру соединен с сигнальной обмоткой электрического датчика обратной связи гидроцилиндра;
- электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя;
- электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя;
- гидрораспределитель, гидравлически соединенный с гидролиниями нагнетания и слива и через две гидролинии гидравлически соединенный с рабочими полостями гидроцилиндра;
- гидроцилиндр, шток которого кинематически связан с подвижным элементом электрического датчика обратной связи;
согласующую аппаратуру электрического датчика обратной связи гидроцилиндра,
При этом согласно изобретению:
- выход первого суммирующего операционного усилителя соединен с входом первого электронного корректирующего устройства, передаточная функция которого WКУ1(s) имеет следующий вид:
 ,
,
где: u1 - выходной сигнал первого электронного корректирующего устройства;
Δu1 - входной сигнал первого электронного корректирующего устройства (выходной сигнал суммирующего операционного усилителя);
Δu1=uвх-uoc1;
uвх - управляющий сигнал на входе первого суммирующего операционного усилителя;
uoc1 - выходной сигнал согласующей аппаратуры;
Тк1, Тк2, Тк3 - постоянные времени передаточной функции WKУ1(s).
Тк1=(2÷4)Тср.
Постоянная времени Тср определяется по соотношению:  ;
;
ωср - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура следящего привода пересекает ось частот;
Tк2=(2÷4)Tк1;  ;
;
fраб - частота, в пределах которой нормируются динамические характеристики ЭГСП;
- выход первого электронного корректирующего устройства соединен с входом электронного блока ограничения, реализующего следующую функциональную зависимость выходного сигнала (u2) от входного сигнала (u1):
 ;
;
 - максимальная скорость холостого хода (без нагрузки) выходного звена ЭГСП при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости;
- максимальная скорость холостого хода (без нагрузки) выходного звена ЭГСП при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости;
kДОС - коэффициент передачи электрического датчика обратной связи;
kCA - коэффициент передачи согласующей аппаратуры;
kДОСkCA [В/см];
ky2 - коэффициент усиления передаточной функции второго электронного корректирующего устройства; ky2 [c].
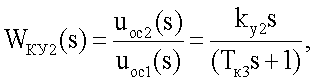
- выход блока ограничения u2 соединен с одним из входов второго суммирующего операционного усилителя, второй вход которого соединен с выходом второго электронного корректирующего устройства, вход которого соединен с выходом согласующей аппаратуры и передаточная функция которого WКУ2(s) имеет следующий вид:
 ,
,
где: uoc2(s) - выходной сигнал второго электронного корректирующего устройства;
 .
.
- выход второго суммирующего операционного усилителя Δu2 (Δu2=u2-uoc2) соединен с входом электронного усилителя мощности.
Сущность заявленного изобретения поясняется чертежом, на котором представлена принципиальная схема усовершенствованного электрогидравлического следящего привода (ЭГСП).
Усовершенствованный ЭГСП содержит:
- первый суммирующий операционный усилитель (СОУ1) (1), на один вход которого подается управляющий сигнал (uвх), а другой вход через согласующую аппаратуру (СА) (9) соединен с сигнальной обмоткой электрического датчика обратной связи (ДОС) (11) гидроцилиндра;
- первое электронное корректирующее устройство (КУ1) (2), вход которого соединен с выходом СОУ1 (1) - Δu1 (Δu1=uвх-uoc1), где uoc1 - выходной сигнал СА (9);
- блок ограничения (БО) (3), вход которого соединен с выходом КУ1 (2) - u1;
- второй суммирующий операционный усилитель (СОУ2) (4), один вход которого соединен с выходом БО (3) - u2, а другой вход соединен с выходом КУ2 (8) - uос2;
- второе электронное корректирующее устройство (КУ2) (8), вход которого соединен с выходом СА (9);
- электронный усилитель мощности (ЭУМ) (5), выход которого соединен с управляющей обмоткой ЭМП (6);
- электромеханический преобразователь (ЭМП) (6), якорь которого кинематически связан с подвижным элементом гидрораспределителя;
- гидрораспределитель (ГР) (7), гидравлически соединенный с гидролиниями нагнетания и слива и через две гидролинии гидравлически соединенный с рабочими полостями гидроцилиндра;
- гидроцилиндр (ГЦ) (10), шток которого кинематически связан с подвижным элементом ДОС (11);
- согласующую аппаратуру (СА) (9), вход которой соединен с сигнальной обмоткой ДОС (11).
Усовершенствованный ЭГСП работает следующим образом.
Управляющий сигнал (uвх) поступает на один вход первого суммирующего операционного усилителя (СОУ1) (1), второй вход которого через согласующую аппаратуру (СА) (9) соединен с сигнальной обмоткой датчика обратной связи (ДОС) (11).
Таким образом, формируется внешний контур ЭГСП, обеспечивающий следящий режим работы ЭГСП по выходной координате (хп) - соответствие модуля и знака этой координаты модулю и знаку управляющего сигнала (uвх).
Выход СОУ1 (1) соединен с входом первого электронного корректирующего устройства (КУ1) (2) с передаточной функцией WКУ1s) следующего вида:
;
где: u1 - выходной сигнал КУ1;
Δu1 - входной сигнал КУ1 (выходной сигнал СОУ1);
Δu1=uвх-uoc1;
uoc1 - выходной сигнал СА (9).
Tк1 и Tк2 - постоянные времени интегро-дифференцирующей составляющей WКУ1(s), обеспечивающей повышение коэффициента усиления в цепи ошибки внешнего контура ЭГСП в определенной полосе частот, что позволяет:
- уменьшить непроизводительный расход ЭГУ за счет увеличения перекрытий по рабочим кромкам гидрораспределителя без ухудшения зоны нечувствительности;
- повысить точность воспроизведения выходной координаты ЭГСП (xп) при малых амплитудах управляющего сигнала и на малых частотах работы ЭГСП.
Tк1=(2÷4)Tcp.
Тcp - постоянная времени, определяемая по соотношению:
 ;
;
ωср - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура ЭГСП пересекает ось частот;
Tк2=(2÷4)Tк1.
fраб - частота, в пределах которой нормируются динамические характеристики ЭГСП.
Апериодическое звено  введено в WКУ1(s) для компенсации дифференцирующего эффекта звена с передаточной функцией (Tк3s+1) в цепи ошибки внешнего контура ЭГСП. Указанное дифференцирующее звено обусловлено видом передаточной функции второго электронного корректирующего устройства (КУ2) (8) (см. ниже).
введено в WКУ1(s) для компенсации дифференцирующего эффекта звена с передаточной функцией (Tк3s+1) в цепи ошибки внешнего контура ЭГСП. Указанное дифференцирующее звено обусловлено видом передаточной функции второго электронного корректирующего устройства (КУ2) (8) (см. ниже).
Выход КУ1 (u1) соединен с входом электронного блока ограничения (БО) (3), позволяющего реализовать ограничение максимального значения скорости выходной координаты ЭГСП  . Блок ограничения реализует следующую функциональную зависимость выходного сигнала (u2) от входного сигнала (u1):
. Блок ограничения реализует следующую функциональную зависимость выходного сигнала (u2) от входного сигнала (u1):
 ;
;
- максимальная скорость холостого хода (без нагрузки) выходного звена ЭГСП при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости;
kДОС - коэффициент передачи ДОС (11);
kCA - коэффициент передачи СА (9);
kДОСkCA [В/см];
ky2 - коэффициент усиления передаточной функции второго электронного корректирующего устройства КУ2 (8) (см. ниже),
ky2 [c].
Выход БО (3) - u2 соединен с одним из входов второго суммирующего операционного усилителя (СОУ2) (4), второй вход которого соединен с выходом второго электронного корректирующего устройства КУ2 (8) - uoc2 и вход которого соединен с выходом СА (9). Модуль и знак uoc2 соответствуют модулю и знаку скорости выходного звена ЭГСП . Таким образом, формируется внутренний контур ЭГСП, обеспечивающий обратную связь по скорости выходного звена ЭГСП.
Этот контур обеспечивает инвариантность коэффициента усиления по скорости выходной координаты ЭГСП к нагрузке, к изменению давлений нагнетания и слива и к изменению температуры рабочей жидкости.
Передаточная функция КУ2 (8) WКУ2(s) имеет следующий вид:
,
где: uoc2(s) - выход КУ2 (8);
.
Отметим, что постоянная времени Тк3 фигурирует и в WКУ1(s) (см. выше).
Реализация указанного выше принципа работы внутреннего контура ЭГСП, помимо обеспечения инвариантности скорости выходного звена ЭГСП, позволяет исключить в ЭГУ регулированный узел, так как сформированный внутренний контур ЭГСП компенсирует влияние на коэффициент усиления по скорости ЭГСП допусков: на коэффициент усиления ЭУМ (5), на моментную характеристику ЭМП (6) и на жесткость упругих подвесов гидрораспределителя (плоского золотника) (7).
Выход СОУ2 - Δu2 (Δu2=u2-uoc1) соединен с входом ЭУМ (5); выход ЭУМ (5) соединен с управляющей обмоткой ЭМП (6).
Так как подвижный элемент ГР (7) кинематически связан с якорем ЭМП (6), то и модуль, и знак координаты подвижного элемента ГР (7) определяется модулем и знаком тока в управляющей обмотке ЭМП (6).
При отклонении подвижного элемента ГР (7) от нейтрального положения возникает перепад давлений в рабочих полостях ГЦ (10). В результате выходное звено ГЦ (шток ГЦ) начинает движение из своего исходного положения, что предопределяет появление сигнала обратной связи в сигнальной обмотке ДОС (11). Этот сигнал после прохождения согласующей аппаратуры одновременно поступает на один из входов СОУ1 (1) и на вход КУ2 (8).
В итоге имеем:
1. Упрощение конструкции ЭГУ за счет исключения регулировочного узла.
2. Улучшение статических, динамических и энергетических характеристик ЭГСП за счет введения обратной связи по скорости его выходного звена, что обеспечивает инвариантность коэффициента усиления по скорости выходного звена ЭГСП к внешней нагрузке, к изменению давлений нагнетания и слива и к изменению температуры рабочей жидкости.
3. Уменьшение непроизводительного расхода рабочей жидкости за счет введения интегро-дифференцирующего звена в цепь ошибки внешнего контура привода, позволяющего без ущерба для статических и динамических характеристик увеличить перекрытия в гидрораспределителе.
4. Упрощение схемы ограничения максимальной скорости выходного звена ЭГСП за счет замены гидравлического (ограничение площади рабочего окна золотника) или механического (механические упоры по ходу золотника) устройств на простое и дешевое электронное устройство.
Привод предназначен для электрогидравлических автоматических систем управления летательных аппаратов. Привод с однокаскадным электрогидравлическим усилителем мощности содержит первый суммирующий операционный усилитель, выход которого соединен с входом первого электронного корректирующего устройства, выход которого соединен с входом электронного блока ограничения, выход которого соединен с одним из входов второго суммирующего операционного усилителя, второй вход которого соединен с выходом второго электронного корректирующего устройства, вход которого соединен с выходом согласующей аппаратуры, выход второго суммирующего операционного усилителя соединен с входом электронного усилителя мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя, якорь которого кинематически связан с подвижным элементом гидрораспределителя, гидравлически соединенного с гидролиниями нагнетания и слива и через две гидролинии гидравлически соединенного с рабочими полостями гидроцилиндра, шток которого кинематически связан с подвижным элементом электрического датчика обратной связи, соединенного с согласующей аппаратурой. Технический результат - упрощение конструкции. 1 ил.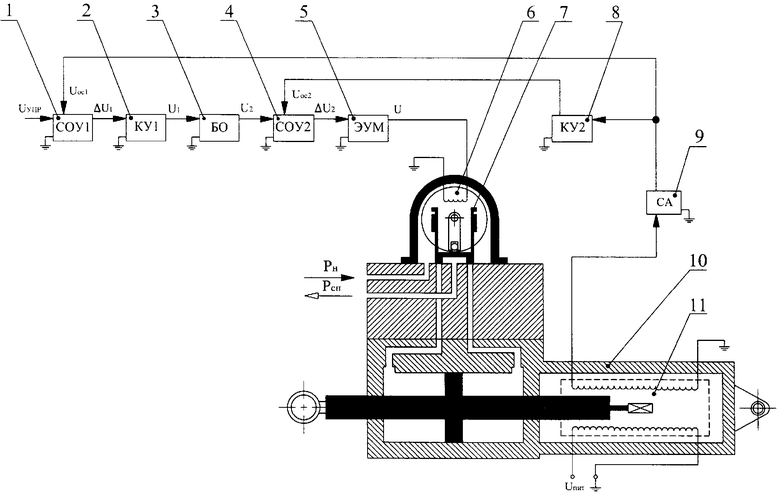
Электрогидравлический следящий привод дроссельного регулирования с однокаскадным электрогидравлическим усилителем мощности, содержащий:
первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал, а другой вход, через согласующую аппаратуру, соединен с сигнальной обмоткой электрического датчика обратной связи гидроцилиндра;
электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя;
электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя;
гидрораспределитель, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с рабочими полостями гидроцилиндра;
гидроцилиндр, шток которого кинематически связан с подвижным элементом электрического датчика обратной связи;
согласующую аппаратуру электрического датчика обратной связи гидроцилиндра,
отличающийся тем, что
выход первого суммирующего операционного усилителя соединен с входом первого электронного корректирующего устройства, передаточная функция которого WКУ1(s) имеет следующий вид:

где u1 - выходной сигнал первого электронного корректирующего устройства;
Δu1 - входной сигнал первого электронного корректирующего устройства (выходной сигнал суммирующего операционного усилителя);
Δu1=uвх-uoc1;
uвх - управляющий сигнал на входе первого суммирующего операционного усилителя;
uoc1 - выходной сигнал согласующей аппаратуры;
Тк1, Тк2, Тк3 - постоянные времени передаточной функции WKУ1(s);
Тк1=(2÷4)Тср;
постоянная времени Тср определяется по 
ωср - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура следящего привода пересекает ось частот;
fраб - частота, в пределах которой нормируются динамические характеристики электрогидравлического следящего привода;
выход первого электронного корректирующего устройства соединен с входом электронного блока ограничения, реализующего следующую функциональную зависимость выходного сигнала (u2) от входного сигнала (u1):
 - максимальная скорость холостого хода (без нагрузки) выходного звена электрогидравлического следящего привода при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости;
- максимальная скорость холостого хода (без нагрузки) выходного звена электрогидравлического следящего привода при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости;
kДОС - коэффициент передачи электрического датчика обратной связи;
kCA - коэффициент передачи согласующей аппаратуры;
kДОСkCA [В/см];
ky2 - коэффициент усиления передаточной функции второго электронного корректирующего устройства;
ky2 [c];
выход блока ограничения u2 соединен с одним из входов второго суммирующего операционного усилителя, второй вход которого соединен с выходом второго электронного корректирующего устройства, вход которого соединен с выходом согласующей аппаратуры, и передаточная функция которого WКУ2(s) имеет следующий вид:
где uoc2(s) - выходной сигнал второго электронного корректирующего устройства;
выход второго суммирующего операционного усилителя Δu2 (Δu2=u2-uoc2) соединен с входом электронного усилителя мощности.
| РАЗИНЦЕВ В.И | |||
| Электрогидравлические усилители мощности | |||
| - М.: Машиностроение, 1980, с.69, рис.27 | |||
| Электрогидравлический усилитель мощности | 1988 |
|
SU1587231A1 |
| и др.), 23.08.1990 | |||
| Электрогидравлический усилитель мощности с электрической обратной связью | 1977 |
|
SU735831A1 |
| US 3455330 A, (L JACK WILLIAMS ET AL), 15.07.1969 | |||
| US 44442855 A, (HOFFVAN JR ET AL), 17.04.1984. | |||

