Изобретение относится к области машиностроения, а именно к электрогидравлическим автоматическим системам (Electro hydraulic control systems), широко применяемым в различных отраслях техники, где используются быстродействующие электрогидравлические усилители (ЭГУ) большой мощности (расходы рабочей жидкости от 300 л/мин и рабочие давления до 35 МПа). Это и испытательные стенды в автомобильной и авиационной промышленностях, и мощные виброустановки в современных системах поиска нефти и газа, и прокатные станы в металлургии и ряд других применений.
Известны трехкаскадные электрогидравлические усилители мощности американской фирмы "MOOG" серий D791 и D792 с пилотными двухкаскадными ЭГУ серий D761 и D765 [Каталог «Сервоклапаны фирмы MOOG» GmbH. Нижегородский филиал, Россия, 2003 г.]. Отличие ЭГУ D765 от ЭГУ D761 заключается в типе обратной связи. У ЭГУ D761 эта связь механическая - от гидрораспределителя второго каскада на электромеханический преобразователь через пружину, которая своей усталостной прочностью определяет ресурс работы ЭГУ. У ЭГУ D765 обратная связь электрическая и его ресурс существенно больше. Кроме того, электрическая обратная связь имеет еще ряд преимуществ [Разинцев В.И. Электрогидравлические усилители мощности. - М.: Машиностроение, 1980 г., - 120 с.]. Исходя из вышеизложенного, в качестве прототипа примем трехкаскадный ЭГУ D792 с пилотным ЭГУ D765, как наиболее совершенный трехкаскадный ЭГУ на сегодняшний день. Принципиальная электрогидравлическая схема ЭГУ-прототипа (D792 с пилотным ЭГУ D765) изображена на фиг.1. ЭГУ содержит:
первый суммирующий операционный усилитель (СОУ1) (1), на один вход которого подается управляющий сигнал (uвх), а другой вход, через согласующую аппаратуру (СА1) (8), соединен с сигнальной обмоткой электрического датчика обратной связи (10) гидрораспределителя третьего каскад а (11);
второй суммирующий операционный усилитель (СОУ2) (2), один вход которого соединен с выходом первого суммирующего операционного усилителя(1), а другой вход, через согласующую аппаратуру (СА2)(7), соединен с сигнальной обмоткой электрического датчика обратной связи (9) гидрораспределителя второго каскада (6);
электронный усилитель мощности (ЭУМ) (3), вход которого соединен с выходом второго суммирующего операционного усилителя (2);
электромеханический преобразователь (ЭМП) (4), управляющая обмотка которого соединена с выходом электронного усилителя мощности (3), а якорь кинематически связан с подвижным элементом гидрораспределителя первого каскада (5);
гидрораспределитель первого каскада (5), гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя второго каскада (6);
гидрораспределитель второго каскада (6), кинематически связанный с подвижным элементом электрического датчика обратной связи (9), гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя третьего каскада (11);
гидрораспределитель третьего каскада (11), кинематически связанный с подвижным элементом электрического датчика обратной связи (10), гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с рабочими полостями исполнительного механизма (гидроцилиндр, неполноповоротный или полноповоротный гидромотор).
Недостатками рассмотренного ЭГУ-прототипа являются:
1. Сложность электрической схемы - два электрических датчика обратной связи (ДОС), два комплекта согласующей аппаратуры (СА) по двум каналам обратной связи.
2. Возможность возникновения работы ЭГУ по механическим упорам третьего каскада, что может привести к выходу из строя ЭГУ. Такие режимы работы могут иметь место при нештатной работе управляющей аппаратуры заказчика, когда на вход ЭГУ поступают сигналы управления, превышающие расчетное значение. Такие режимы могут возникать на этапах адаптации ЭГУ к системе управления заказчика.
3. При работе ЭГУ на малых частотах и при сигнале управления малой амплитуды (при малых значениях ошибки Δu1 - см. фиг.1) снижается точность воспроизведения управляющего сигнала выходной координатой ЭГУ из-за недостаточной величины коэффициента усиления электронной части контура ЭГУ, который в быстродействующих ЭГУ обычно ограничен из-за большого значения коэффициента усиления гидравлической части, определяемого заданной полосой частот и амплитудой, отрабатываемых ЭГУ.
4. Ограничение на величину коэффициента усиления электрической части в цепи ошибки внутреннего контура (контура пилотного двухкаскадного ЭГУ) из-за резонансного пика на амплитудной частотной характеристике малодемпфированного механического звена первого каскада - якорь электромеханического преобразователя (ЭМП) и подвижный элемент гидрораспределителя первого каскада на пружинном подвесе.
5. Зависимость коэффициента усиления по скорости гидрораспределителя третьего каскада от нагрузки (инерционная и демпфирующая силы, гидродинамическая сила, сила трения), от величины давлений нагнетания и слива и от температуры рабочей жидкости, что ухудшает статические и динамические характеристики ЭГУ и снижает кпд его наиболее мощной гидравлической части (гидрораспределитель третьего каскада).
6. Необходимость выполнять на гидрораспределителе второго каскада малые перекрытия, для обеспечения малой зоны нечувствительности трехкаскадного ЭГУ, что приводит к увеличению утечек в пилотном ЭГУ.
Задачей изобретения является устранение вышеперечисленных недостатков.
Указанная задача решается тем, что трехкаскадный электрогидравлический усилитель мощности содержит: первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал, а другой вход, через согласующую аппаратуру, соединен с сигнальной обмоткой электрического датчика обратной связи гидрораспределителя третьего каскада; второй суммирующий операционный усилитель; электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя; электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя первого каскада; гидрораспределитель первого каскада, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя второго каскада; гидрораспределитель второго каскада, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с управляющими полостями гидрораспределителя третьего каскада; гидрораспределитель третьего каскада, кинематически связанный с подвижным элементом электрического датчика обратной связи, гидравлически соединенный с гидролиниями нагнетания и слива и, через две гидролинии, гидравлически соединенный с рабочими полостями исполнительного механизма (гидроцилиндр, неполноповоротный или полноповоротный гидромотор), при этом новым является то, что: на входе первого суммирующего операционного усилителя установлен электронный блок ограничения управляющего сигнала, обеспечивающий электрогидравлическое торможение гидрораспределителя третьего каскада на заданном расстоянии от его механических упоров, функциональная зависимость выходного сигнала блока ограничения (uвх) от входного сигнала  описывается следующей формулой:
описывается следующей формулой:
где 
kДОС - коэффициент передачи электрического датчика обратной связи гидроусилителя;
kCA - коэффициент передачи согласующей аппаратуры;
 - максимальное расчетное рабочее значение координаты x3;
- максимальное расчетное рабочее значение координаты x3;
 ;
;
 - предельное значение координаты x, при котором гидрораспределитель третьего каскада доходит до механических упоров;
- предельное значение координаты x, при котором гидрораспределитель третьего каскада доходит до механических упоров;
- между первым и вторым суммирующими операционными усилителями установлено первое электронное корректирующее устройство, передаточная функция которого WKУ1(s), имеет следующий вид:
 ,
,
где Δu1 - выходной сигнал первого суммирующего операционного усилителя Δu1=uвх-uос1;
uос1 - сигнал обратной связи с электрического датчика обратной связи гидрораспределителя третьего каскада после прохождения согласующей аппаратуры;
u1 - выходной сигнал первого электронного корректирующего устройства, постоянные времени TК1 и ТК2 выбираются по следующим соотношениям:
 ,
,
ωср - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура ЭГУ пересекает ось частот;
TK2=(4÷6)TK1.
 ωп=2πfп; fп=(1,5÷2)fраб
ωп=2πfп; fп=(1,5÷2)fраб
fраб - частота, в пределах которой нормируются частотные характеристики трехкаскадного гидроусилителя;
- между вторым суммирующим операционным усилителем и электронным усилителем мощности установлено второе электронное корректирующее устройство, передаточная функция которого может выполняться в двух вариантах:
а) первый вариант
 ,
,
где u2 - выходной сигнал второго электронного корректирующего устройства;
Δu2 - входной сигнал второго электронного корректирующего устройства (выходной сигнал второго суммирующего операционного усилителя) Δu2=u1-uoc2;
uoc2 - выходной сигнал третьего электронного корректирующего устройства;
Та и ζа - постоянная времени и относительный коэффициент демпфирования механического звена первого каскада;
ζσ=(5÷30)ζа; Tσ=(0,2÷1)Ta;
б) второй вариант
 ,
,
где ТК4=(3÷5)Та.
- между согласующей аппаратурой электрического датчика обратной связи и вторым суммирующим операционным усилителем установлено третье электронное корректирующее устройство, передаточная функция которого имеет следующий вид:
 ,
,
где  ;
;
F3 - площадь управляющих торцев гидрораспределителя третьего каскада (см2);
 - максимальная расчетная величина расхода рабочей жидкости, подаваемого в управляющие полости ненагруженного гидрораспределителя третьего каскада от гидрораспределителя второго каскада при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости (расход холостого хода) (см3/с);
- максимальная расчетная величина расхода рабочей жидкости, подаваемого в управляющие полости ненагруженного гидрораспределителя третьего каскада от гидрораспределителя второго каскада при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости (расход холостого хода) (см3/с);
 - максимальное расчетное значение сигнала на входе второго суммирующего операционного усилителя, соответствующее максимальной скорости холостого хода гидрораспределителя третьего каскада (при
- максимальное расчетное значение сигнала на входе второго суммирующего операционного усилителя, соответствующее максимальной скорости холостого хода гидрораспределителя третьего каскада (при  ) (В);
) (В);
[kДОСkCA]-(B/см).
На фиг.1 показана принципиальная электрогидравлическая схема трехкаскадного ЭГУ-прототипа.
На фиг.2 показана принципиальная электрогидравлическая схема трехкаскадного электрогидравлического усилителя мощности.
Трехкаскадный электрогидравлический усилитель мощности работает следующим образом.
На входе первого суммирующего операционного усилителя (СОУ1) - (2) установлен электронный блок ограничения (БО) - (1), предназначенный для электрогидравлического ограничения максимального перемещения гидрораспределителя третьего каскада (ГР3) (13) посредством ограничения модуля выходного сигнала БО (1) - (uвх) при превышении сигнала на входе БО  определенной величины. Достигается это тем, что в БО (1) реализуется следующая функциональная зависимость выходного сигнала (uвх) от входного сигнала
определенной величины. Достигается это тем, что в БО (1) реализуется следующая функциональная зависимость выходного сигнала (uвх) от входного сигнала  :
:
где 
kДОС - коэффициент передачи ДОС ГРЗ (13);
kCA - коэффициент передачи согласующей аппаратуры (СА) (11);
 - максимальное расчетное значение координаты ГР3 (13);
- максимальное расчетное значение координаты ГР3 (13);
 - предельное значение координаты x3, при котором ГР3 (13) доходит до механического упора.
- предельное значение координаты x3, при котором ГР3 (13) доходит до механического упора.
Выход БО (uвх) соединен с одним из входов СОУ1 (2), второй вход которого соединен с сигнальной обмоткой датчика обратной связи (ДОС) (12), через согласующую аппаратуру СА (11). Таким образом, формируется внешний контур, обеспечивающий следящий режим работы ЭГУ - соответствие модуля и знака координаты ГРЗ (13) (х3) модулю и знаку управляющего сигнала (uвх). Выход СОУ1 (2) - соединен с входом первого электронного корректирующего устройства (КУ1) (3) с передаточной функцией:
,
где u1 - выходной сигнал КУ1;
Δu1=uвх-uoc1; uoc1 - сигнал на выходе СА (11);
TK1 и ТK2 - постоянные времени интегродифференцирующей составляющей WKУ1(s), обеспечивающей повышение точности воспроизведения выходной координаты ЭГУ (х3) при малых амплитудах входного сигнала и на малых частотах работы ЭГУ;
,
ωср - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура ЭГУ пересекает ось частот;
ТK2=(4÷6)TK1.
Апериодическое звено  введено в WКУ1(s) для компенсации дифференцирующего эффекта звена с передаточной функцией (TК3s+1) в цепи ошибки внешнего контура ЭГУ, замыкаемого через СОУ1 (2). Указанное дифференцирующее звено обусловлено видом передаточной функции третьего электронного корректирующего устройства (КУ3) (10) (см. ниже).
введено в WКУ1(s) для компенсации дифференцирующего эффекта звена с передаточной функцией (TК3s+1) в цепи ошибки внешнего контура ЭГУ, замыкаемого через СОУ1 (2). Указанное дифференцирующее звено обусловлено видом передаточной функции третьего электронного корректирующего устройства (КУ3) (10) (см. ниже).
Выход КУ1 (u1) соединен с одним из входов СОУ2 (4), другой вход которого соединен с выходом КУ3 (10) - (uoc2). На выходе СОУ2 (4) установлено второе электронное корректирующее устройство (КУ2) (5), предназначенное для компенсации резонансного пика на амплитудной частотной характеристике малодемпфированного механического звена гидрораспределителя первого каскада (ГР1) (8) - якорь электромеханического преобразователя (ЭМП) (7) и подвижный элемент ГР1 (8) на пружинном подвесе.
Передаточная функция КУ2 (5) может выполняться в двух вариантах:
а) первый вариант
 ,
,
где u2 - выходной сигнал КУ2;
Δu2=u1-uoc2;
uoc2 - выходной сигнал КУ3 (10)
Та и ζа - постоянная времени и относительный коэффициент демпфирования колебательного звена механической части ГР1 (8);
ζσ=(5÷30)ζa; Тσ=(0,2÷1)Ta;
б) второй вариант
 ,
,
где ТК4=(3÷5)Та.
Вариант реализации КУ2 (5) выбирает разработчик ЭГУ при формировании внутреннего контура (контура обратной связи по скорости выходной координаты ЭГУ - х3) в зависимости от требуемых статических и динамических характеристик ЭГУ и при конкретных значениях величин Та и ζа.
Выход КУ2 (5) - (u2) соединен с входом электронного усилителя мощности (ЭУМ) (6), внешней нагрузкой которого является управляющая обмотка ЭМП (7), а выходным сигналом ЭУМ (6) является ток (i) в этой обмотке, который, в свою очередь, является входным сигналом для ЭМП (7). Выходным сигналом ЭМП (7) является координата подвижного элемента ГР1 (8), величина и знак которой определяются величиной и знаком тока в управляющей обмотке ЭМП (7).
При изменении  в пределах от 0 до
в пределах от 0 до  разность сигналов uвх и uoc1→Δu1, проходит через КУ1(3) и алгебраически суммируется с сигналом uoc2 (выходной сигнал КУ3 (10)); проходя далее, через КУ2 (5), сигнал Δu1 поступает на вход ЭУМ (6), на выходе которого - ток i в обмотках ЭМП (7) вызывающий движение якоря ЭМП и, кинематически связанного с ним, подвижного элемента ГР1.
разность сигналов uвх и uoc1→Δu1, проходит через КУ1(3) и алгебраически суммируется с сигналом uoc2 (выходной сигнал КУ3 (10)); проходя далее, через КУ2 (5), сигнал Δu1 поступает на вход ЭУМ (6), на выходе которого - ток i в обмотках ЭМП (7) вызывающий движение якоря ЭМП и, кинематически связанного с ним, подвижного элемента ГР1.
При отклонении подвижного элемента ГР1 (8) от нейтрального положения возникает перепад давлений в управляющих полостях гидрораспределителя второго каскада (ГР2) (9), который под действием этого перепада давлений смещается от своего нейтрального положения, что предопределяет возникновение перепада давлений в управляющих полостях ГР3 (13), который, смещаясь от своего исходного положения, будучи кинетически связанным с подвижным элементом ДОС (12), предопределяет появление в сигнальной обмотке ДОС (12) сигнала обратной связи (uoc1). Этот сигнал одновременно поступает на один из входов С01 (2) и на вход КУ3 (10), установленного на выходе СА (11).
Выходной сигнал КУ3 (uoc2) по величине и знаку соответствует скорости выходной координаты ЭГУ (координаты ГР3 (13) - x3). Это соответствие обеспечивает инвариантность этой скорости к нагрузке на ГР3 (13) (инерционная и демпфирующая, нагрузка трения и гидродинамическая сила), к изменению: давлений нагнетания и слива и температуры рабочей жидкости. Передаточная функция КУ3 (10) имеет следующий вид:
 ,
,
где  ;
;
F3 - площадь управляющих торцев ГР3 (13) (см2);
 - расчетное значение максимального расхода рабочей жидкости, подаваемого от ГР2 (9) в управляющие полости ненагруженного ГР3 (13) при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости (расход холостого хода) (см3/с);
- расчетное значение максимального расхода рабочей жидкости, подаваемого от ГР2 (9) в управляющие полости ненагруженного ГР3 (13) при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости (расход холостого хода) (см3/с);
 - максимальное расчетное значение сигнала на выходе (КУ1) (3), соответствующее максимальной скорости холостого хода ГР3 (13) (при
- максимальное расчетное значение сигнала на выходе (КУ1) (3), соответствующее максимальной скорости холостого хода ГР3 (13) (при  ) (В);
) (В);
 , ωп=2πfп;
, ωп=2πfп;
fп=(2-3)fраб,
fраб - частота, в пределах которой нормируются динамические характеристики трехкаскадного ЭГУ.
Отметим, что постоянная времени ТК3 фигурирует и в WКУ1(s) (см. выше).
При движении ГР3 (13), при увеличении модуля выходного сигнала КУ3 (10) - (uос1) происходит списывание сигнала u1, на входе в СОУ2 (4), в результате чего, обеспечивается следящий режим работы внутреннего контура ЭГУ - соответствие знаку и модулю сигнала Ui знака и модуля скорости выходной координаты ЭГУ - (х3).
Одновременно с вышеописанным процессом, при движении ГР3 (13), при увеличении сигнала (uoc1), происходит списывание сигнала (uвх) в СОУ1 (2), и, как следствие, будет обеспечиваться следящий режим работы ЭГУ по выходной координате (х3) - соответствие модуля и знака этой координаты модулю и знаку входного сигнала  .
.
В результате описанных процессов, за счет работы внешнего контура будет обеспечиваться следящий режим работы ЭГУ по выходной координате (х3). А в результате работы внутреннего контура обеспечивается следящий режим работы этого контура по скорости выходной координаты ЭГУ вне зависимости от нагрузки на ГР3 (13), изменения давлений нагнетания и слива и вне зависимости от температуры рабочей жидкости.
В итоге мы имеем:
1. Существенное упрощение и, как следствие, повышение надежности работы ЭГУ и снижение его стоимости за счет исключения из схемы ЭГУ одного из двух электрических датчиков обратной связи и его аппаратуры согласования. Достигается это за счет сравнительно простых, дешевых и надежных электронных устройств.
2. Электрогидравлическое торможение гидрораспределителя третьего каскада ЭГУ при входных управляющих сигналах, превышающих расчетную величину при внештатной работе аппаратуры заказчика. Это свойство ЭГУ позволяет исключить работу выходного каскада по механическим упорам и, тем самым, предохранить его от поломки на этапах отработки ЭГУ совместно с аппаратурой заказчика.
3. Повышение точности работы ЭГУ на малых частотах и при малых амплитудах управляющего сигнала за счет введения в цепь ошибки внешнего контура ЭГУ интегро-дифференцирующего звена, повышающего коэффициент усиления в цепи ошибки внешнего контура ЭГУ на малых частотах.
4. Улучшение статических и динамических характеристик ЭГУ за счет введения в цепь ошибки внутреннего контура ЭГУ электронного корректирующего устройства, компенсирующего резонансный пик малодемпфированного механического звена гидрораспределителя первого каскада.
5. Улучшение статических, динамических и энергетических характеристик ЭГУ за счет реализации инвариантности коэффициента усиления по скорости гидрораспределителя третьего каскада ЭГУ к нагрузке на нем, к изменению величин давлений нагнетания и слива и к изменению температуры рабочей жидкости.
Усилитель предназначен для автоматических систем, где используются быстродействующие электрогидравлические усилители большой мощности. Усилитель содержит электронный блок ограничения, первый суммирующий операционный усилитель, первое электронное корректирующее устройство, второй суммирующий операционный усилитель, второе электронное корректирующее устройство, электронный усилитель мощности, электромеханический преобразователь, гидрораспределитель первого каскада, гидрораспределитель второго каскада, третье электронное корректирующее устройство, согласующую аппаратуру и гидрораспределитель третьего каскада. Технический результат - повышение надежности и точности работы гидроусилителя и снижение его стоимости. 2 ил.
Трехкаскадный электрогидравлический усилитель мощности, содержащий первый суммирующий операционный усилитель, на один вход которого подается управляющий сигнал, а другой вход через согласующую аппаратуру соединен с сигнальной обмоткой электрического датчика обратной связи гидрораспределителя третьего каскада; второй суммирующий операционный усилитель; электронный усилитель мощности, выход которого соединен с управляющей обмоткой электромеханического преобразователя; электромеханический преобразователь, якорь которого кинематически связан с подвижным элементом гидрораспределителя первого каскада; гидрораспределитель первого каскада, гидравлически соединенный с гидролиниями нагнетания и слива и через две гидролинии гидравлически соединенный с управляющими полостями гидрораспределителя второго каскада; гидрораспределитель второго каскада, гидравлически соединенный с гидролиниями нагнетания и слива и через две гидролинии гидравлически соединенный с управляющими полостями гидрораспределителя третьего каскада; гидрораспределитель третьего каскада, кинематически связанный с подвижным элементом электрического датчика обратной связи, гидравлически соединенный с гидролиниями нагнетания и слива и через две гидролинии гидравлически соединенный с рабочими полостями исполнительного механизма (гидроцилиндр, неполноповоротный или полноповоротный гидромотор), отличающийся тем, что на входе первого суммирующего операционного усилителя установлен электронный блок ограничения управляющего сигнала, обеспечивающий электрогидравлическое торможение гидрораспределителя третьего каскада на заданном расстоянии от его механических упоров, функциональная зависимость выходного сигнала блока ограничения (uвх) от входного сигнала  описывается следующей формулой:
описывается следующей формулой:

где 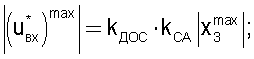
kДОС - коэффициент передачи электрического датчика обратной связи гидроусилителя;
kСА - коэффициент передачи согласующей аппаратуры;
 - максимальное расчетное рабочее значение координаты х3;
- максимальное расчетное рабочее значение координаты х3;
 ;
;
 - предельное значение координаты х, при котором гидрораспределитель третьего каскада доходит до механических упоров;
- предельное значение координаты х, при котором гидрораспределитель третьего каскада доходит до механических упоров;
между первым и вторым суммирующими операционными усилителями установлено первое электронное корректирующее устройство, передаточная функция которого WКУ1(s), имеет следующий вид:
 ,
,
где Δu1 - выходной сигнал первого суммирующего операционного усилителя
Δu1=uвх-uoc1;
uoc1 - сигнал обратной связи с электрического датчика обратной связи гидрораспределителя третьего каскада после прохождения согласующей аппаратуры;
u1 - выходной сигнал первого электронного корректирующего устройства, постоянные времени TK1 и ТK2 выбираются по следующим соотношениям:
 ,
,
ωср - частота, на которой амплитудная частотная характеристика разомкнутого внешнего контура ЭГУ пересекает ось частот;
TK2=(4÷6)TK1;
 ωп=2πfп; fп=(1,5÷2)fраб,
ωп=2πfп; fп=(1,5÷2)fраб,
где fраб - частота, в пределах которой нормируются частотные характеристики трехкаскадного гидроусилителя;
где между вторым суммирующим операционным усилителем и электронным усилителем мощности установлено второе электронное корректирующее устройство, передаточная функция которого может выполняться в двух вариантах:
а) первый вариант
 ,
,
где u2 - выходной сигнал второго электронного корректирующего устройства;
Δu2 - входной сигнал второго электронного корректирующего устройства (выходной сигнал второго суммирующего операционного усилителя)
Δu2=u1-uос2;
uос2 - выходной сигнал третьего электронного корректирующего устройства;
Та и ζа - постоянная времени и относительный коэффициент демпфирования механического звена первого каскада;
ζσ=(5÷30)ζа; Tσ=(0,2÷1)Ta;
б) второй вариант
 ,
,
где Тк4=(3÷5)Та,
между согласующей аппаратурой электрического датчика обратной связи и вторым суммирующим операционным усилителем установлено третье электронное корректирующее устройство, передаточная функция которого имеет следующий вид:
 ,
,
где  ;
;
F3 - площадь управляющих торцов гидрораспределителя третьего каскада, см2;
 - максимальная расчетная величина расхода рабочей жидкости, подаваемого в управляющие полости ненагруженного гидрораспределителя третьего каскада от гидрораспределителя второго каскада при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости (расход холостого хода), см3/с;
- максимальная расчетная величина расхода рабочей жидкости, подаваемого в управляющие полости ненагруженного гидрораспределителя третьего каскада от гидрораспределителя второго каскада при номинальных значениях давлений нагнетания и слива и при нормальной температуре рабочей жидкости (расход холостого хода), см3/с;
 - максимальное расчетное значение сигнала на входе второго суммирующего операционного усилителя, соответствующее максимальной скорости холостого хода гидрораспределителя третьего каскада (при
- максимальное расчетное значение сигнала на входе второго суммирующего операционного усилителя, соответствующее максимальной скорости холостого хода гидрораспределителя третьего каскада (при  ), В;
), В;
[kДОСkCA], B/см.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Электрогидравлическая следящая система | 1989 |
|
SU1679075A1 |
| Электрогидравлический усилитель | 1981 |
|
SU989173A1 |
| US 5165448 A, 11.24.1992 | |||
| US 5240041 A, 31.08.1993. | |||

