Область техники, к которой относится изобретение
Данное изобретение относится к области неразрушающих способов анализа.
Более конкретно, изобретение касается способа и устройства для автоматического определения плотности объектов путем измерения затухания пропускаемого сквозь них прямолинейного фотонного пучка с целью определения размерных характеристик этих объектов.
Одним из видов применения изобретения является контроль и мониторинг корректной работы оборудования для производства и обработки объектов, например таблеток ядерного топлива, таких как UOX и/или МОХ, и, в частности, применимо для мониторинга фактора воспроизводимости при изготовлении указанных объектов, относящегося к показателю плотности этих объектов.
Кроме того, изобретение можно использовать для определения осевого и радиального градиентов плотности, например, в качестве очень точного сканнера для компьютерной томографии.
Уровень техники
Неразрушающие способы определения плотности на основе активного ядерного излучения уже были созданы, в частности для определения плотности геологических образцов. В приводимом в качестве ссылки документе Been, К., "Non-destructive Soil Bulk density Measurement by X-ray Attenuation", Geotechnical Testing Journal, GTJODJ, Vol.4, No.4, Dec. 1981, pp 169-176 автор предлагает производить измерение плотности образцов путем определения затухания прямолинейного фотонного пучка от рентгеновских трубок, не пытаясь при этом точно определять размер исследуемых образцов. В приводимых в качестве ссылки документах Tan, S.-A and Fwa T.-F "Non-destructive density Measurements of Cylindrical Specimens by Gamma-Ray Attenuation", Journal of Testing Evaluation, JTEVA, Vol.19, No.2, March 1991, pp.155-160 и Tan S.-A and Fwa, T.-F "Non-destructive Density Measurements of Cylindrical Specimens within a Mold by Самма-Rays", Journal of Testing Evaluation, JTEVA, vol.21, No.4, July 1993, pp.296-301 авторы предлагают производить измерение плотности геологических образцов путем определения затухания прямолинейного фотонного пучка с помощью гамма-излучения. Они обнаружили и продемонстрировали влияние геометрических параметров образцов на точность измерения плотности, однако они не предложили решения для точного определения упомянутых геометрических параметров.
Следует заметить, что хотя вышеуказанные документы и касаются плотности образцов, фактической их целью является определение массы на единицу объема упомянутых объектов, а термин «плотность» используется вместо показателя «масса на единицу объема» для упрощения описания.
Раскрытие изобретения
Целью настоящего изобретения является определение плотности объектов, принадлежащих к заданной партии объектов, путем определения отклонения величины плотности каждого из упомянутых объектов относительно известного значения плотности, по меньшей мере, одного из упомянутых объектов, используемого в качестве эталона или стандарта.
Такое определение плотности упомянутых объектов производится с применением неразрушающего ядерного способа, состоящего из облучения гамма-фотонами и использования гамма-спектрометра для определения интенсивности потока гамма-фотонов.
Определение плотности упомянутых объектов требует предварительного определения, по меньшей мере, одного значимого размера упомянутых объектов.
В отличие от способов, изложенных в вышеупомянутых ссылках на известный уровень техники, в настоящем изобретении учитывается влияние геометрических параметров путем очень точного измерения, по меньшей мере, одного значимого размера упомянутых объектов, плотность которых подлежит определению, и использования этого измеренного значимого размера для определения плотности испытуемых объектов. Упомянутый значимый размер может быть величиной ширины или диаметра объекта и соответствует тому действительному размеру, сквозь который проходит поток гамма-фотонов.
Способ определения значимого размера объекта составляет часть способа определения плотности упомянутого объекта. Для измерения размера объекта используется прибор инфракрасного излучения.
Кратко напомним, что физический принцип определения плотности объекта путем измерения затухания фотонного потока заключается в облучения объекта опросным пучком, состоящим из монохроматических фотонов с энергией 'Е'. Интенсивность пучка фотонов уменьшается в большей или меньшей степени в зависимости от плотности объекта, сквозь который проходит пучок, в зависимости от толщины материала, сквозь который проходит пучок, а также в зависимости от элементарного химического состава объекта, сквозь который проходит пучок фотонов. Эта интенсивность определяется следующим уравнением:
I=I0ехр(-µmρX)
где:
- I представляет собой ослабленную интенсивность фотонного пучка, выраженную в фотонах-1,
- I0 представляет собой неослабленную интенсивность фотонного пучка с энергией 'Е', выраженную в фотонах-1,
- µm представляет собой коэффициент затухания по массе для фотонного пучка с энергией 'Е' в объекте, выраженный в см2·г-1,
- ρ представляет собой величину плотности испытуемого объекта, выраженную в г·см-3,
- Х представляет собой толщину материала, сквозь который проходит фотонный пучок, или значимый размер объекта, выраженный в см.
Отсюда непосредственно получается выражение для плотности объекта:
Таким образом, если известны значение интенсивности пучка, пропущенного сквозь испытуемый объект, и значение интенсивности пучка в случае отсутствия объекта (значения I и I0, соответственно), значение коэффициента затухания по массе µm и величина значимого размера Х объекта, фактически пройденного лучом, то можно определить величину плотности ρ испытуемого объекта.
В настоящем изобретении предлагается определять значение толщины Х материала объекта, сквозь который проходит фотонный луч, и значение ослабленной интенсивности I фотонного пучка с энергетическим уровнем 'Е', прошедшего сквозь этот объект, и использовать эти значения для вычисления относительного отклонения плотности ρ данного объекта в сравнении с плотностью, по меньшей мере, одного эталонного объекта. Один отличительный признак настоящего изобретения состоит в том, что эти определения толщины материала (значимого размера объекта) и интенсивности фотонного пучка выполняются с точностью приблизительно до одного микрометра.
Величину относительного отклонения плотности ρ испытуемого объекта получают, используя следующее выражение:
где ρе представляет собой известную величину плотности объекта, используемого в качестве стандарта плотности, а xе представляет собой величину значимого размера объекта со стандартной плотностью, сквозь который прошел пучок.
Коэффициент затухания по массе µm, который зависит от химического состава объекта, определяют с помощью одного или нескольких аттестованных и, безусловно, известных стандартных объектов, имеющих такой же химический состав, как и объект, подлежащий испытанию. Коэффициент затухания определяют в ходе одной операции, описание которой будет приведено далее при рассмотрении калибровки прибора для определения интенсивности фотонного пучка, ослабленной в результате прохождения пучка сквозь стандартный объект.
Когда объект, подлежащий испытанию, имеет круглое сечение, то в качестве значимого размера фигурирует диаметр этого объекта. Когда же объект, подлежащий испытанию, по своей конфигурации представляет параллелепипед, то в качестве значимого размера, сквозь который проходит пучок фотонов, фигурирует ширина этого объекта.
В остальной части описания будут использоваться следующие условные обозначения, когда требуется различать испытуемый объект «i» среди партии объектов 100 и/или различать принятый за стандарт объект «е» среди партии объектов 100:
- индекс «emas» представляет значения относительно объекта со значением плотности, принятой за стандарт, например его значимый размер «xemas»,
- индекс «edim» представляет значения относительно объекта со значением размера, принятого за стандарт, например его значимый размер «xedim».
В соответствии с первым аспектом настоящего изобретения устройство для автоматического определения плотности объекта, принадлежащего к партии объектов, включает в себя:
- прибор для определения значимого размера упомянутого объекта,
- прибор для определения интенсивности фотонного пучка, ослабленной в результате прохождения сквозь упомянутый объект,
- прибор для сбора, обработки и анализа данных,
- средство транспортировки объекта к прибору для определения значимого размера этого объекта, а также к прибору для определения ослабленной интенсивности фотонного пучка,
- первое средство регулирования положения объекта по отношению к прибору для определения значимого размера,
- второе средство регулирования положения объекта по отношению к прибору для определения ослабленной интенсивности фотонного пучка,
при этом упомянутые первое и второе регулировочные средства способны перемещать данный объект с точностью порядка одного микрометра относительно опорной платы, на которой установлены элементы, составляющие данное устройство,
причем положение объекта относительно прибора для определения ослабленной интенсивности фотонного пучка регулируется в зависимости от значимого размера этого объекта.
Предпочтительно, прибор для определения значимого размера исследуемого объекта является измерительным прибором, использующим инфракрасное излучение.
Предпочтительно, прибор для определения интенсивности фотонного пучка, ослабленной в результате прохождения сквозь исследуемый объект, является гамма-спектрометром, в состав которого входят:
- узел, состоящий из источника излучения и коллиматора,
- узел, состоящий из детектора и коллиматора,
- система для сбора и подсчета гамма-фотонов.
В изобретении используются средство транспортировки и средство регулирования положения каждого испытуемого объекта по отношению к прибору для определения значимого размера объекта и/или по отношению к прибору для определения ослабленной интенсивности фотонного пучка, при этом упомянутое средство регулирования положения способно обеспечивать точность расположения объекта порядка одного микрометра.
В соответствии со вторым аспектом настоящего изобретения предлагается способ использования устройства для автоматического определения плотности объекта (100), принадлежащего к партии объектов, причем этот способ включает в себя следующие стадии калибровки:
- стадия 1 для калибровки положения двух блоков инфракрасного излучения в приборе для определения значимого размера объектов,
- стадия 2 для калибровки положения опоры излучателя гамма-спектрометра, используемого для определения интенсивности фотонного пучка, ослабленной в результате прохождения сквозь объекты,
- стадия 3 для калибровки измерительного узла «источник-детектор» гамма-спектрометра, используемого для определения интенсивности фотонного пучка, ослабленной в результате прохождения сквозь объекты,
причем этот способ включает стадии непосредственного определения значимого размера объектов, которые производятся над каждым объектом в вышеупомянутой партии объектов.
В соответствии с настоящим изобретением эти стадии непосредственного определения включают:
- этап 4 для определения значимого размера испытуемого объекта,
- этап 5 для транспортировки объекта к опоре излучателя,
- этап 6 для регулировки положения объекта путем регулирования положения опоры излучателя относительно источника и связанного с ним детектора,
- этап 7 для определения ослабленной интенсивности фотонного пучка, прошедшего сквозь объект,
- этап 8 для сбора данных, обработки и анализа полученного спектра,
- этап 9 для определения величины относительного отклонения Δρ/ρ плотности объекта по отношению к плотности одного или нескольких объектов со значением плотности, принятым за стандарт,
- этап транспортировки 10 для возврата объекта в свое положение на поворотном столе.
Способы и устройства в соответствии с настоящим изобретением обладают преимуществом быстродействия, точности, наличия автоматического режима либо позволяют производить автоматизацию, а также являются простыми в эксплуатации.
Одно преимущество настоящего изобретения заключается в том, что затухание прямолинейного фотонного пучка связано с микрометрической метрологией, благодаря чему исключаются неопределенности, сопряженные с недостоверным знанием значений толщины объектов, сквозь которые проходит пучок, а это обстоятельство непосредственно влияет на степень точности, с которой определяют плотность.
В частности, положение каждого объекта относительно прибора, используемого для определения интенсивности фотонного пучка, ослабленной в результате пересечения этого объекта, регулируется в зависимости от того значимого размера данного объекта, который был предварительно определен прибором, используемым для определения значимого размера.
Краткое описание чертежей
Данное изобретение можно лучше понять после прочтения подробного описания предпочтительного варианта его воплощения, представленного ниже в виде свободного от ограничений примера, который проиллюстрирован на прилагаемых фигурах, где:
- на фигуре 1 представлен схематический чертеж (вид сверху) комплексного устройства для определения значимого размера и для определения плотности объектов.
- Фигура 2 представляет собой схематический чертеж (общий вид) комплексного устройства для определения значимого размера и для определения плотности объектов.
- На фигурах 3, 4 и 5 представлены схематические чертежи (виды сверху) устройства для определения значимого размера объектов с помощью инфракрасного излучения, и три фазы в способе для определения этого значимого размера.
- Фигура 6 представляет собой схематический чертеж (общий вид в разрезе) коллиматора в источнике облучения фотонами;
- Фигура 7 представляет схематический чертеж (общий вид в разрезе) коллиматора в детекторе гамма-фотонов;
- Фигура 8 представляет схематическое изображение системы для сбора и подсчета данных;
- Фигуры 9А и 9В представляют все операции способа для определения плотности объектов; фигура 9А представляет предварительные калибровочные операции, а фигура 9 В представляет операции непосредственного определения;
- Фигура 10 представляет первую операцию способа, которая является операцией калибровки положения прибора для определения значимого размера;
- Фигура 11 представляет вторую операцию способа, которая является операцией калибровки положения прибора для определения ослабленной интенсивности фотонного пучка;
- Фигура 12 представляет третью операцию способа, которая является операцией калибровки измерительного узла прибора для определения ослабленной интенсивности фотонного пучка;
- Фигура 13 представляет четвертую операцию способа, которая является операцией для определения значимого размера объекта;
- Фигура 14 представляет девятую операцию способа, которая является операцией для определения величины относительного отклонения плотности испытуемого объекта по сравнению с относительным отклонением для одного или нескольких стандартных объектов;
- На фигуре 15 представлен график, отображающий относительное отклонение плотности испытуемых объектов в данной партии объектов по сравнению с плотностью одного из стандартных или эталонных объектов, в сопоставлении этой величины относительного отклонения плотности, полученной средствами настоящего изобретения, с относительным отклонением теоретической плотности, представленной изготовителем данных объектов.
Осуществление изобретения
На фигурах 1 и 2 представлены, соответственно, вид сверху и общий вид предпочтительного варианта исполнения комплексного устройства для определения плотности каждого объекта 100 в данной партии за счет затухания фотонов, путем определения относительного отклонения этой плотности по отношению к плотности, по меньшей мере, одного из упомянутых объектов, используемого в качестве стандарта или эталона плотности, причем для определения этой плотности используется предварительное определение значимого размера х упомянутого объекта 100 и интенсивности I фотонного пучка, который испускается и проходит сквозь упомянутый объект 100.
Установка включает в себя следующие компоненты:
- прибор 2 для определения значимого размера объекта 100;
- прибор 30 для определения интенсивности фотонного пучка, ослабленной за счет прохождения сквозь объект 100;
- прибор 200 для сбора, обработки и анализа данных;
- средства транспортировки 70, 72, 80, 82, 84, 86, 88 и средства регулировки положения 74, 76, 78, 90, 92, 94, 96, 98 объекта 100 по отношению к прибору 2 для определения размера объекта и по отношению к прибору 30 для определения интенсивности пучка, соответственно.
Прибор 200 для сбора, обработки и анализа данных в целом показан схематически на фигуре 1. В частности, в него входит персональный компьютер 170, на котором установлено специализированное программное обеспечение с рядом инструкций и вычислительных алгоритмов, используемых в автоматической процедуре определения плотности объектов 100, в соответствии с настоящим изобретением.
На фигурах 3, 4 и 5 показан прибор инфракрасного излучения 2, используемый для определения значимого размера х объекта 100, который включает в себя:
- первый узел 4, 6 инфракрасного облучения, состоящий из первого инфракрасного излучателя 4 и первого инфракрасного приемника 6,
- второй узел 8, 10 инфракрасного облучения, состоящий из второго инфракрасного излучателя 8 и второго инфракрасного приемника 10.
Эти два узла 4, 6 и 8, 10 инфракрасного облучения расположены таким образом, что соответственные оси 12, 14 генерируемых инфракрасных лучей идут параллельно и отстоят друг от друга на расстоянии d. Это расстояние d, фиксируемое изготовителем, выбрано таким, что имеет тот же порядок величины, что и значимый размер х объектов 100, подлежащих испытанию. Это расстояние можно регулировать. В показанном примере инфракрасные лучи ориентированы в одном направлении, однако, может быть предусмотрена другая конфигурация.
Прибор 2 для определения значимого размера х объекта 100 при помощи инфракрасного излучения содержит также третий узел, состоящий из фотоэлектронного излучателя 16 и фотоэлектронного приемника 18 и расположенный на входной стороне первого узла 4, 6 инфракрасного облучения по отношению ко второму узлу 8, 10 инфракрасного облучения, причем фотоэлектрический луч, генерируемый третьим узлом, имеет ось 19. В показанном примере ось 19 фотоэлектронного пучка идет параллельно осям 12, 14 инфракрасных лучей, причем все оси расположены в одной плоскости. Может быть предусмотрена другая конфигурация осей.
Прибор 2 для определения значимого размера х объекта 100 при помощи инфракрасного излучения связан с транспортирующим средством и/или средством регулирования положения объекта 100 по отношению к вышеуказанным трем трансиверным узлам 4, 6, 8, 10, 16, 18, которые будут рассмотрены ниже.
Во время работы прибор 2, определяющий значимый размер х объекта 100, располагают в таком положении, с учетом которого зафиксированы позиции трех трансиверных узлов 4, 6, 8, 10, 16, 18, и при этом объект 100 смещают таким образом, что на него последовательно попадает сначала фотоэлектронный луч, затем первый инфракрасный луч, и затем второй инфракрасный луч.
Прибор 2 калибруют таким образом, чтобы создать расстояние d между осями 12 и 14 двух инфракрасных лучей, которое по существу имеет ту же самую величину, что и значимый размер xedim одного или нескольких объектов со стандартным размером edim. Процесс калибровки будет описан ниже. Отсюда следует, что во время определения значимого размера объекта 100 (нестандартный объект) этот объект перемещается относительно трех трансиверных узлов 4, 6, 8, 10, 16, 18 и проходит хотя бы сквозь одну позицию, в которой он все еще пересекает половину первого пучка инфракрасного излучения (фигура 5, позиция 22), но пока полностью не пересекает второй пучок инфракрасного излучения, причем оставшаяся часть второго пучка (фигура 5, позиция 24), которая не попадает на объект 100, достигает второго приемника 10.
Значимый размер х объекта 100 выводят, зная инфракрасный отклик RI, соответствующий этой оставшейся части пучка. Этот размер получают с помощью зависимости следующего типа:
х=А4·(RI4)+А3·(RI3)+А2·(RI2)+A1·(RI1)+A0,
где А4, А3, А2, A1, A0 представляют собой коэффициенты, полученные с использованием, по меньшей мере, четырех объектов со стандартным размером edim и с применением того же соотношения, в которое вводят известный значимый размер xedim и измеренный инфракрасный отклик RIedim каждого из упомянутых объектов со стандартным размером edim, однократно для каждого объекта со стандартным размером.
Как показано на фигуре 4, функцией третьего узла 16, 18 является автоматический запуск предварительной регулировки интенсивности двух инфракрасных лучей 22, 24, когда объект 100 пересекает фотоэлектронный луч, генерируемый третьим узлом 16, 18, во время относительного смещения по направлению 20. Целью данной операции является устранение влияния внешних помех, таких как загрязнение оптических линз. Эта операция должна выполняться не позднее чем за 30 секунд до операции непосредственного измерения объекта 100.
Точность, с которой определяется значимый размер х объекта 100, зависит от точности относительного смещения объекта 100 по отношению к трем трансиверным узлам 4, 6, 8, 10, 16, 18, а следовательно, от характеристик и калибровки средств транспортировки и/или регулировки положения объекта, эти аспекты будут более подробно изложены позже.
В соответствии с настоящим изобретением интенсивность I фотонного пучка точно измеряют с помощью гамма-спектрометрического прибора 30, предназначенного для определения интенсивности фотонного пучка, который излучается и проходит сквозь испытуемый объект 100, как изображено на фигурах 1, 2 и 8. Этот прибор включает в себя:
- узел, образованный из источника фотонного излучения и коллиматора 32, причем сам по себе этот узел является известным;
- узел, образованный из детектора и коллиматора 40, причем сам по себе этот узел является известным;
- систему 48 для сбора и обсчета данных, причем сама по себе система является известной.
Для упрощения описания далее по тексту источник облучения фотонами будем называть просто «источник».
Различные компоненты измерительного прибора 30 подвержены некоторым ограничениям, связанным с требуемой характеристикой для всей системы в целом, а также для окружающей среды, в которой будет работать данная система. Этими ограничениями, которые в частности касаются интенсивности источника, типа источника, а также эксплуатационных характеристик системы для сбора и обсчета данных, являются следующие:
- интенсивность источника должна быть такой, чтобы статистическое рассеивание результатов измерения было значительно меньше, чем разброс отсчетов, вследствие различия в плотности испытуемого объекта по отношению к плотности эталонного/стандартного объекта;
- энергия источника должна обеспечивать очень хороший контраст после малого изменения плотности испытуемого объекта;
- период радиоактивного полураспада источника не должен быть слишком коротким, т.к. такой источник сопряжен с ограничениями при использовании в производственной среде;
- и, наконец, интенсивность и энергия источника должны быть совместимы с возможностями обработки электронной системой для сбора и обсчета данных (время запаздывания, пакетирование, насыщение и т.д.).
В предпочтительном варианте воплощения изобретения источник выполнен из изотопа 133Bа с величиной активности, по меньшей мере, 10 миллиКюри (мКюри). Чтобы избежать последствий времени запаздывания и/или насыщения, предпочтительно использовать источник с величиной активности, не превышающей 150 мКюри. Продолжительность измерения обратно пропорциональна величине активности источника.
На фигуре 6 показан пример конструкции коллиматора 32 из узла «источник-коллиматор», совместимой с указанными различными ограничениями. Она включает в себя защитный каркас 34, обеспечивающий безопасность персонала, работающего вблизи источника, причем в каркасе отграничена полость 36, в которой размещается источник. Пучок гамма-фотонов направляется коллимационной щелью 38.
В соответствии с представленным примером коллиматор 32 источника выполнен из свинца и имеет наружные размеры: высота 60 мм, длина 60 мм и ширина 60 мм. В качестве источника служит изотоп 133Ва с величиной активности 10 мКюри, помещенный в полость 36, имеющую диаметр 6,1 мм и высоту 9,5 мм. Коллимационная щель 38 имеет длину 30 мм, ширину 6 мм и высоту 4 мм.
На фигуре 7 показан пример конструкции коллиматора 40 из узла «детектор-коллиматор». Конструкция включает в себя экранирующий каркас 42, для того чтобы гамма-лучи, идущие от источника и распространяемые за пределы коллимационной щели 38, не обнаруживались детектором 49, а коллимационная щель 44 и полость 46, размещающая детектор 49, отграничивались экранирующим каркасом 42.
В этом примере конструкции коллиматор 40 детектора 49 выполнен из свинца и имеет наружные размеры: диаметр 140 мм, длина 120 мм, а внутренние размеры: диаметр 80 мм, длина 200 мм. Коллимационная щель 38 имеет высоту 4 мм, ширину 6 мм и длину 30 мм.
Свинец, как материал изготовления экранирующего каркаса 42, можно заменить вольфрамом, который ослабляет гамма-лучи в большей степени, чем свинец, и, следовательно, дает преимущество в том, что позволяет уменьшить толщину экранирующего каркаса 42, однако недостатком вольфрама является его более высокая стоимость, чем стоимость свинца.
С целью упрощения дальнейшего описания узел «источник-коллиматор» будем называть просто «источник», обозначая его позицией 32, а узел «детектор-коллиматор» будем называть просто «детектор», обозначая его позицией 40.
Расстояние между источником и детектором выбирают соответственно.
В соответствии с предпочтительным воплощением изобретения система 48 для сбора и обсчета данных, изображенная на фигуре 8, включает следующие компоненты:
- детектор 49 в виде германиевого диода [HP] (особо чистый Ge) с предварительным усилителем;
- процессор 50 преобразования цифровых сигналов;
- модуль высокого напряжения 54;
- сетевой модуль и интерфейс 56 для сбора данных;
- персональный компьютер 170 для сбора данных (изображен на фигуре 1).
Необязательно, эта система для сбора и обсчета данных включает в себя криостат 60, состоящий из резервуара для жидкого азота, который поддерживает холодный штырек германиевого диода [HP] при постоянной температуре, что обеспечивает преимущество, сводя к минимуму доплеровский эффект, и дает очень хорошее разрешение по сигналу, при этом исключен нагрев детектора 49, искажающий измерения.
Предпочтительно иметь предварительный усилитель, встроенный в указанный германиевый диод [HP], что дает преимущество, выражаемое в минимизации емкостного эффекта благодаря отсутствию электрического кабеля, снижая фон электронных помех. Кроме того, такой усилитель фильтрует и формирует сигнал.
Затем этот сигнал преобразуют в цифровую форму с помощью процессора 50 преобразования сигнала, и затем цифровой сигнал вводят в память прибора.
Совокупность полученных данных составляет гамма-спектр, иными словами, гистограмму с распределением ряда импульсов по различным каналам в зависимости от их энергии.
Данные передаются (указано стрелкой 62) между процессором 50 преобразования сигнала и компьютером 170 прибора 200 для сбора, обработки и анализа данных посредством сетевого модуля и интерфейса 56 для сбора данных, трансивера 63 и сетевого адаптера 59. В проиллюстрированном примере прибор 200 для сбора, обработки и анализа данных, как и система 48 для сбора и обсчета данных, использует один и тот же компьютер 170, однако, может быть предусмотрена конфигурация с двумя отдельными компьютерами.
Данная система 48 для сбора и обсчета данных особенно пригодна при высокой скорости импульсов.
Кроме того, еще одно ограничение по использованию гамма-спектрометрического прибора 30 для определения интенсивности фотонного пучка, облучающего объекты 100, относится к параметру «время счета» системы 48 для сбора и обсчета данных, так как этот параметр должен быть согласован со скоростью изготовления объектов 100, подлежащих тестированию.
Согласно изобретению время счета может быть параметром, вводимым в систему, или результатом расчета, выполненного с использованием следующего теоретического соотношения:
с приближением, по которому пространственный угол равен 4πD2,
где:
A(t) представляет собой активность источника, выраженную в беккерелях (Бк);
D представляет собой расстояние между источником и коллимационным окном, выраженное в мм;
S представляет собой площадь поверхности коллимационного окна детектора, в мм2;
α представляет собой величину доверительного интервала для случая, когда счет импульсов следует распределению Пуассона;
ε представляет собой эффективность полного поглощения фотонов детектором;
I представляет собой интенсивность фотонного пучка с энергией Е, ослабленной в результате прохождения сквозь объект, выраженную в γ·с-1;
I0 представляет собой неослабленную интенсивность фотонного пучка с энергией Е, в γ·с-1;
R0=I/I0 представляет собой коэффициент пропускания объекта, сквозь который проходят монохроматические фотоны, испускаемые источником;
Σ представляет собой общее количество ударов, зарегистрированное в измеряемом спектре, выраженное числом ударов;
Р представляет собой общее количество ударов, содержащихся в пике энергии Е,
βsec=β/10 представляет собой значение Р, приписываемое коэффициенту безопасности, равному 10,
где β=Δρ/ρ,
и где ρ представляет собой величину плотности объекта.
Точность, с которой определяется интенсивность I, ослабленная в результате прохождения фотонного пучка сквозь объект 100, особенно зависит от положения упомянутого объекта 100 относительно источника 32. Следовательно, точность определения интенсивности I зависит от рабочих характеристик и калибровки средства регулирования положения объекта. Эти аспекты будут более подробно рассмотрены ниже.
Различные транспортирующие средства 70, 12, 80, 82, 84, 86, 88 и средства регулирования положения 74, 76, 78, 90, 92, 94, 96, 98 представлены на фигурах 1 и 2, изображающих всю систему в целом. Их назначение заключается в транспортировке объекта 100 к каждому из приборов 2, 30, используемых для определения или регулирования положения объекта 100 относительного компонентов каждого из измерительных приборов 2, 30.
Опорная пластина 150 поддерживает компоненты всей системы, а именно прибор 2, используемый для определения значимого размера объекта, прибор 30, используемый для определения ослабленной интенсивности пучка, транспортирующие средства, первое средство регулировки и второе средство регулировки положения объекта. Направления смещения схематически изображены системой координат 152 на фигуре 2. Смещения производятся в горизонтальной плоскости (X, Y) опорной пластины 150 или по вертикальному направлению Z, перпендикулярному к горизонтальной плоскости (X, Y) опорной пластины 150.
Транспортирующие средства 70, 72 предназначены для транспортировки объекта 100 в первое положение, в котором прибор 2 определяет значимый размер объекта 100. Эти средства включают в себя горизонтальный поворотный стол 70, приводимый в движение шаговым электродвигателем 72, причем оба этих компонента установлены на опорной пластине 150. В представленном примере поворотный стол 70 имеет двенадцать мест для размещения объектов.
Первые средства для регулировки положения 74, 76, 78 предназначены для регулирования положения объекта 100 по отношению к двум узлам инфракрасного облучения 4, 6 и 8, 10, которые используются для измерения значимого размера х объекта 100.
Регулировочное средство 74 представляет собой салазки, ориентированные по направлению X, вдоль которого располагаются основание 26 прибора 2 инфракрасного облучения, используемого для определения размера, и поворотный стол 70.
Указанные два узла инфракрасного облучения 4, 6 и 8, 10 установлены на основании 26 таким образом, что оси 12, 14 инфракрасного излучения располагаются параллельно направлению X. Для данной партии объектов, все размеры которых, по существу, имеют один порядок величины, относительные положения основания 26 и поворотного стола 70 вдоль этого направления Х предпочтительно фиксируют один раз в начале серии измерений для данной партии объектов.
Регулировочное средство 76 представляет собой исполнительный механизм, функция которого заключается в том, чтобы перемещать первый узел инфракрасного облучения 4, 6 ближе ко второму узлу инфракрасного облучения 8, 10 или дальше от него по направлению Y. Такое смещение первого узла инфракрасного облучения 4, 6 по направлению Y обеспечивает средство управления положением объекта 100 с точностью примерно до одного микрометра относительно двух лучей инфракрасного излучения для определения значимого размерам (диаметра или толщины).
Регулировочное средство 78 представляет собой исполнительный механизм, функция которого заключается в том, чтобы перемещать основание 26 по направлению Z. Амплитуда этого смещения относительно мала, так что исключена возможность схода основания 26 с салазок 74. Смещение основания по направлению Z обеспечивает средство получения размера объекта 100, используемого для определения его значимого размера х с точностью примерно до одного микрометра.
Транспортирующие средства 70, 72, 80, 82, 84, 86, 88 также выполняют функцию смещения объекта 100 из первого положения, в котором прибор 2 определяет значимый размер х, во второе положение, в котором прибор 30 определяет ослабленную интенсивность I фотонного пучка. Эти средства включают в себя поворотный стол 70, приводимый в движение соответствующим шаговым электродвигателем 72. Несколько объектов 100 располагаются на диске поворотного стола 70, причем при повороте этого диска одновременно выполняются два действия: во-первых, транспорт объекта 100 в первое положение измерения и, во-вторых, перемещение предшествующего объекта 100 из первого положения измерения в промежуточное положение после выполнения углового смещения объекта на угол А. В примере, показанном на фигурах 1 и 2, величина этого угла А равна 90°. Транспортирующие средства также включают в себя механический манипулятор 80, который захватывает объект 100, установленный на поворотном столе 70 в промежуточном положении, и транспортирует объект на подложку 90 для облучения, расположенную между коллиматором 32 источника и коллиматором 40 детектора. В примере, показанном на фигуре 2, механический манипулятор 80 имеет захватывающий зажим 82, шарнирно закрепленный на промежуточном сегменте 84, который шарнирно связан с исполнительным механизмом 86, способным при передаче движения перемещаться в направлении Х опорной пластины 150 по направляющим 88. Сжимающие/отпускающие движения захвата 82 и его поворотное движение вокруг сегмента 84, а также поворотные движения сегмента 84 относительно исполнительного механизма 86 управляются приводами (не показаны).
Функция вторых регулировочных средств 90, 92, 94, 96, 98 состоит в том, чтобы регулировать положение объекта 100 по отношению к источнику 32 и детектору 40 гамма-спектрометрического прибора 30, определяющего интенсивность пучка, который прошел сквозь упомянутый объект 100. Эти средства включают в себя подложку 90 для облучения, на которую устанавливают объект 100. Данная подложка 90 для облучения имеет верхнюю поверхность 92 с V-образным поперечным сечением или любое другое средство, позволяющее объекту 100 автоматически устанавливаться в устойчивое положение равновесия на указанной подложке 90 для облучения, при этом особенно важно, чтобы объект 100 не мог перемещаться по отношению к подложке 90 для облучения вдоль направления Х опорной пластины 150. Подложку 90 для облучения располагают вдоль направления Х опорной пластины 150 с помощью салазок 94, которые предпочтительно совпадают с салазками 74. Для данной партии объектов 100 такая установка в определенном положении делается один раз в начале серии измерений, соответствующей данной партии объектов. Подложка 90 для облучения может перемещаться по направлению Y опорной пластины 150 с помощью исполнительного механизма 96, а также по направлению Z, перпендикулярному к опорной пластине 150, с помощью исполнительного механизма 98. При регулировке положения, выполняемой с помощью исполнительных механизмов 96 и 98, по существу, объект центрируется (по направлению Z) между щелями соответствующих коллиматоров источника 32 и детектора 40.
Более того, необходимо расположить объект вдоль направления Y с точностью примерно один микрометр, для того чтобы интенсивность I фотонного пучка измерялась точно на том размере объекта, который был определен как его значимый размер х. Такое расположение объекта к измерению осуществляется путем фиксации объекта на верхней поверхности 92 подложки 90 для облучения. Например, объект можно привести в прочный контакт со стопором 93 на верхней поверхности 92 подложки 90 для облучения с помощью операции нагнетания из продувочного приспособления (не показано), которое принудительно подает сжатый воздух на объект вдоль направления Y.
На фигуре 1 показана схема соединений с помощью соответствующих соединительных средств 180, во-первых, между различными исполнительными механизмами 76, 78, 86, 96, 98, свободно смещающими детали при передаче движения, и шаговым электродвигателем 72, который вращает поворотный стол 70, и, во-вторых, между контрольно-управляющими блоками 160. Эти блоки 160 управляют механикой и автоматикой системы и с помощью соответствующих соединительных средств 190 соединены с системным блоком 172 компьютера 170 в приборе 200 для сбора, обработки и анализа данных.
Теперь рассмотрим способ определения плотности ρ каждого объекта в данной партии объектов 100 путем сопоставления с величиной плотности ρemas одного или нескольких объектов, выбранных в качестве стандарта или эталона плотности и составляющих часть той же самой партии объектов 100.
Этот способ применяется с алгоритмами для передачи серии команд, которые автоматически выполняют различные операции способа.
Способ в соответствии с настоящим изобретением включает предварительные калибровочные операции, которые выполняются один раз перед началом серии измерений на данной партии объектов, и операции фактического определения, которые выполняются на каждом объекте 100 в упомянутой партии объектов. Все операции способа показаны схематически на фигурах 9А и 9В.
Калибровочные операции следуют в заданной хронологии событий и относятся к следующим компонентам системы:
- стадия 1: калибровка положения двух узлов инфракрасного излучения 4, 6 и 8, 10 прибора 2 для определения значимого размера объектов 100;
- стадия 2: калибровка положения подложки 90 для облучения 90 гамма-спектрометрического прибора 30 для определения интенсивности фотонного пучка, ослабленной в результате прохождения сквозь объекты 100;
- стадия 3: калибровка измерения узла «источник-детектор» 32, 40 прибора 30.
Стадия 1 калибровки положения двух узлов инфракрасного излучения 4, 6 и 8, 10 приведена на фигуре 10.
Эта калибровочная стадия 1 состоит из регулировки положения по направлению Y первого узла инфракрасного излучения 4, 6 по отношению ко второму узлу инфракрасного излучения 8, 10, для того чтобы зафиксировать расстояние d между инфракрасными лучами, испускаемыми двумя излучателями 4, 8, соответственно, в зависимости от точно известного значимого размера xedim одного или нескольких объектов со стандартным размером edim. На практике расстояние d определяют путем постепенного перемещения первого узла инфракрасного излучения 4, 6 от второго узла инфракрасного излучения 8, 10 по направлению Y, при этом второй узел прибора остается зафиксированным в положении YFIX, измеряя отклик объекта по инфракрасному излучению для каждого положения первого узла 4, 6.
Стадия 1 калибровки положения двух узлов инфракрасного излучения 4, 6 и 8, 10 включает в себя, прежде всего, ввод оператором ряда входных параметров с помощью модуля диалогового режима. Эти параметры включают:
- конфигурацию компонентов, которые имеют микрометрическое перемещение; исполнительные механизмы 76, 78, которые управляют их динамическими параметрами: положением, скоростью, ускорением,
- конфигурацию поворотного стола 70, другими словами, характер объектов, которые принимают различные местоположения на поворотном столе 70; произвольного объекта 100, или стандартный размер объекта edim, или стандартную плотность объекта emas, или свободное местоположение,
- положение, принимаемое объектами стандартного размера edim, на поворотном столе 70, причем это местоположение обозначено числом, изменяющимся от 1 до 12 для приведенного примера,
- положение Zизм вдоль направления Z станины 26 прибора 2, которое соответствует размеру Zedim на объекте edim относительно станины объекта,
- положения Y(l) и Y(N), ограничивающие интервал перемещения первого инфракрасного узла 4, 6 вдоль направления Y,
- стадию INT перемещения, выраженного в микрометрах, первого инфракрасного узла 4, 6 вдоль направления Y (величина  должна быть целым числом).
должна быть целым числом).
Затем стадия 1 для калибровки положения двух инфракрасных узлов 4, 6 и 8, 10 включает следующие автоматизированные операции:
а) перемещение станины 26 вдоль направления Z вплоть до положения Zизм за счет действия исполнительного механизма 78,
b) вращательное перемещение поворотного стола 70 для того, чтобы транспортировать объект стандартного размера edim вплоть до его положения начального измерения относительно прибора 2,
c) перемещение первого инфракрасного узла 4, 6 вдоль направления Y вплоть до его исходного положения Y(L) за счет действия исполнительного механизма 76,
d) поступательное перемещение первого инфракрасного узла 4, 6 вдоль направления Y с последовательными приращениями INT, удаление его из второго инфракрасного узла 8, 10, зафиксированного в положении YFIX между положениями Y(l) и Y(N), при одновременном определении инфракрасного отклика RI(n) объекта edim, в соответствии с каждым положением Y(n) следующим образом:
d-1) вращательное перемещение поворотного стола 70 для того, чтобы транспортировать объект стандартного размера edim в конечное положение измерения,
d-2) измерение инфракрасного отклика RI(n) указанного объекта стандартного размера edim,
d-3) вращательное перемещение поворотного стола 70 для того, чтобы перевести объект стандартного размера edim в исходное положение измерения,
e) расчет оптимального инфракрасного отклика
где RIMIN означает значение минимального насыщения инфракрасного отклика; в начале калибровки расстояние между двумя инфракрасными узлами 4, 6 и 8, 10 гораздо меньше, чем значимый размер xedim объекта стандартного размера edim; следовательно, когда объект edim пересекает 50% первого инфракрасного пучка, этот объект edim пересекает на 100% второй инфракрасный пучок, тогда первые инфракрасные отклики имеют одинаковое так называемое "насыщенное" значение RIMIN,
и RIMAX представляет собой максимальное значение насыщения инфракрасного отклика; в конце калибровки расстояние между двумя инфракрасными узлами 4, 6 и 8, 10 является гораздо больше, чем значимый размер xedim объекта стандартного размера edim; следовательно, когда объект edim пересекает 50% первого инфракрасного пучка, этот объект edim пересекает 0% второго инфракрасного пучка; тогда последние инфракрасные отклики имеют одинаковое так называемое "насыщенное" значение RIMAX,
f) расчет оптимального положения YOPT первого инфракрасного узла 4, 6 относительно второго инфракрасного узла 8, 10; оптимальный инфракрасный отклик RIOPT находится между двумя ранее вычисленными последовательными и RI(j) и RI(k) инфракрасного отклика, которые соответствуют двум положениям Y(j) и Y(k) первого инфракрасного узла 4, 6 соответственно; оптимальное положение YOPT вычисляют по этим значениям следующим образом:


Указанные выше операции от а) до f) можно повторять, используя такое количество объектов стандартного размера edim, сколько потребуется.
В конце стадии 1 для калибровки положения двух инфракрасных узлов 4, 6 и 8, 10 создается первый файл калибровки, который содержит в частности оптимальное расстояние d для двух инфракрасных узлов 4, 6 и 8, 10, которое практически соответствует значимому размеру  объектов.
объектов.
Последовательность стадии калибровки 2 подложки 90 для облучения в приборе гамма-спектрометрии 30 с целью определения интенсивности пучка фотонов, ослабленной за счет прохождения сквозь объекты 100, схематически представлена на фигуре 11.
Эта стадия калибровки 2 заключается в регулировании положения вдоль направления Z облучаемой подложки 90 относительно источника 32 и подсоединенного детектора 40, для того чтобы зафиксировать положение ZQPT вдоль направления Z на верхней поверхности 92 облучаемой подложки 90, на которой расположены объекты 100, проходящие сквозь пучок фотонов, в зависимости от точно известной плотности ρ одного или нескольких объектов стандартной плотности emas. На практике положение ZQPT определяется путем постепенного движения облучаемой подложки 90 вдоль направления Z и облучения объекта стандартной плотности emas, смонтированного на облучаемой подложке 90, несколько раз в каждом положении облучаемой подложки. Это положение определяется путем вычисления минимального значения полиномиальной регрессии четвертого порядка и включает стадию определения значимого размера xemas для каждого объекта стандартной плотности emas.
Стадия 2 для калибровки положения облучаемой подложки 90 прибора 30, во-первых, включает этап, на котором оператор вводит ряд вводимых параметров, используя модуль диалогового режима. Эти параметры включают:
- конфигурацию компонентов, которые имеют микрометрическое перемещение: для регулирования динамических параметров: положения, скорости, ускорения используются исполнительные механизмы 96, 98,
- конфигурацию поворотного стола 70, другими словами, характер объектов, которые принимают различные местоположения на поворотном столе 70; произвольного объекта 100, или стандартный размер объекта edim, или стандартную плотность объекта emas, или свободное местоположение,
- местоположение, принимаемое объектами стандартной плотности emas, на поворотном столе 70, причем это местоположение обозначено числом, изменяющимся от 1 до 12 для приведенного примера,
- измерение продолжительности или времени счета,
- положения Z(l) и Z (N), ограничивающие интервал перемещения облучаемой подложки 90 вдоль направления Z,
- число М измерений интенсивности пучка фотонов, ослабленной за счет прохождения сквозь объект, для каждого положения Z(i), принимаемого облучаемой подложкой, для i=1, …, N.
Затем стадия 2 для калибровки положения облучаемой подложки 90 прибора 30 включает следующие автоматизированные операции:
a) определение значимого размера xemas объекта стандартной плотности в соответствии со стадией 4, которая будет описана ниже,
b) вращательное перемещение поворотного стола 70 на угол А, чтобы транспортировать объект стандартной плотности emas в промежуточное положение, в котором объект будет захвачен захватным устройством 80,
c) расположение объекта emas на облучаемой подложке 90, что включает в себя следующие промежуточные операции:
с-1) перемещение облучаемой подложки 90 вниз и вдоль направления Z за счет действия исполнительного механизма 98,
с-2) перемещение захватного устройства 80 из положения ожидания в вертикальное положение в соответствии с промежуточным положением объекта emas за счет действия исполнительного механизма 86,
с-3) захват объекта emas захватным устройством 80 с последующим транспортированием объекта в вертикальное положение в соответствии с верхней гранью 92 облучаемой подложки 90 за счет действия исполнительного механизма 86,
с-4) перемещение облучаемой подложки 90 вплоть до положения Z(l), вверх и вдоль направления Z за счет действия исполнительного механизма 98,
с-5) опускание объекта emas вниз на верхнюю грань 92 облучаемой подложки 90 с использованием захватного устройства 80, за счет действия исполнительного механизма 86,
с-6) перемещение и возврат захватного устройства 80 вплоть до положения ожидания за счет действия исполнительного механизма 86,
с-7) приведение объекта emas в контакт с ограничителем на верхней грани 92 вдоль направления Y, например, за счет операции нагнетания, которую проводят следующим образом:
- перемещение облучаемой подложки 90 вниз, вдоль направления Z вплоть до так называемого положения нагнетания, в котором объект стоит перед нагнетательным устройством, предусмотренным в этой системе,
- сжатый воздух из нагнетательного устройства подается на объект emas вдоль направления Y для того, чтобы привести объект в контакт с ограничителем 93 на облучаемой подложке 90,
d) регулирование фактического положения облучаемой подложки 90 относительно источника 32 и присоединенного детектора 40, которое включает следующие вспомогательные операции:
d-1) поступательное перемещение облучаемой подложки 90 вдоль направления Z между заданным положением Z(l) и заданным положением Z(N),
d-2) для каждого положения Z(i), i=1, …, N облучение объекта стандартной плотности emas пучком фотонов несколько (М) раз, что приводит к ряду значений ослабленной интенсивности I (i, J), где i=1, …, N означает число последовательных положений Z(i), принимаемых облучаемой подложкой 90 и j=1, …, М означает число облучений, выполненных в каждом положении Z(i),
d-3) расчет оптимального положения ZОРТ облучаемой подложки 90, исходя из полиномиальной регрессии четвертого порядка положений Z(i) относительно значений ослабленной интенсивности I(i, j), причем эта полиномиальная регрессия четвертого порядка задается и интегрируется как элемент данных прибора 200 для сбора, обработки и анализа данных,
е) обратный транспорт объекта стандартной плотности emas на поворотный стол 70 с использованием такой же последовательности операций, как описанные выше вспомогательные операции от с-1) до с-6), но в обратном порядке.
После завершения стадии 2 для калибровки положения облучаемой подложки 90 в устройстве гамма-спектрометра 30 определения интенсивности пучка фотонов, ослабленной за счет прохождения сквозь объекты 100, создается второй файл калибровки, который, в частности, включает в себя оптимальное положение ZOPT облучаемой подложки 90 вдоль направления Z.
Стадия 3 для калибровки измерения в устройстве 30 для гамма-спектрометрического определения включает следующие автоматизированные операции:
а) измерение интенсивности Iemas пучка фотонов, ослабленной за счет прохождения сквозь объект стандартной плотности emas, используемый в качестве стандарта,
b) расчет массового коэффициента ослабления µm для объекта стандартной плотности, и затем для всех объектов в наборе объектов, используя следующее соотношение: 
В конце стадии 3 для калибровки измерения в устройстве гамма-спектрометра 30 для определения интенсивности пучка фотонов, ослабленной за счет прохождения сквозь объекты 100, создается третий файл калибровки, который, в частности, включает в себя интенсивность пучка фотонов Iemas, ослабленную за счет прохождения сквозь объект стандартной плотности emas.
На стадиях фактического определения также следуют заданной временной последовательности и выполняют следующие операции:
- стадия 4: определение значимого размера х испытуемого объекта 100,
- стадия 5: транспортирование объекта 100 в направлении облучаемой подложки 90,
- стадия 6: регулирование положения объекта 100 путем корректировки положения облучаемой подложки 90 относительно источника 32 и присоединенного детектора 40,
- стадия 7: определение ослабленной интенсивности I пучка фотонов, проходящего сквозь объект 100,
- стадия 8: сбор, обработка и анализ полученных спектров,
- стадия 9: определение относительного изменения Δρ/ρ плотности объекта 100 относительно плотности одного или нескольких объектов стандартной плотности emas,
- стадия 10: обратный транспорт объекта 100 вплоть до его местоположения на поворотном столе 70.
Стадия 4 для определения значимого размера х испытуемого объекта 100 схематически изображена на фигуре 13. На этой стадии сначала оператор вводит набор вводимых параметров, используя модуль диалогового режима. Эти параметры включают:
- конфигурацию компонентов, которые имеют микрометрическое перемещение: исполнительные механизмы 76, 78, используемые для управления динамическими характеристиками компонентов: положение, скорость, ускорение,
- конфигурацию поворотного стола 70, другими словами, характер объектов, которые принимают различные местоположения на поворотном столе 70; произвольный объект 100, или объект стандартного размера edim, или объект стандартной плотности emas, или свободное местоположение,
- местоположение, принимаемое объектом 100 на поворотном столе 70, причем это местоположение обозначено числом, изменяющимся от 1 до 12 для приведенного примера,
- положение Zизм вдоль направления Z станины 26 прибора 2, что соответствует размеру z объекта 100 относительно станины объекта,
- количество Р инфракрасных измерений для каждого объекта стандартного размера edim(n), n=1, …, N, где N число объектов стандартного размера,
- количество Q инфракрасных измерений для объекта 100.
На стадии 4 для определения значимого размера х испытуемого объекта 100 также используются данные, содержащиеся в первом файле калибровки, полученном на стадии 1.
Затем стадия 4 для определения значимого размера х испытуемого объекта 100 включает следующие автоматизированные операции:
a) перемещение станины 26 вдоль направления Z вплоть до положения Zизм за счет действия исполнительного механизма 78,
b) перемещение первого инфракрасного узла 4, 6 вдоль направления Y за счет действия исполнительного механизма 76, вплоть до положения Yизм, определенного как:
Yизм=YOPT+(xedim-xedimAVE)
где
Yopt означает оптимальное положение, полученное на стадии калибровки 1, причем это значение содержится в первом файле калибровки,
xedim представляет собой размер объекта edim стандартного размера, использованного в ходе стадии калибровки 1, причем это значение содержится в первом файле калибровки,
xedimAVE представляет собой значимый средний размер всех объектов стандартного размера edim, причем это значение задается изготовителем,
c) измерение инфракрасного отклика RI(p), повторяющегося Р раз, р=1, …, Р для N объектов стандартного размера edim(n), n=1, …, N, что приводит к набору величин RI(n, р),
d) вычисление значимого размера х объекта 100 следующим образом:
d-1) вычисление средней величины 
инфракрасного отклика каждого объекта стандартного размера edim(n), для которого известен значимый размер xedim(n), и использование полиномиальной регрессии 4-го порядка значимых размеров xedim(n) для вычисления коэффициентов A0, A1, А2, А3, А4 в соотношении следующего типа:
xedim(n)=А4·(RIedimAVE(N))4+A3·(RIedimAVE(n))3+A2·(RIedimAVE(n))2+A1·(RIedimAVE(n))1+A0,
d-2) измерение инфракрасного отклика RI(q), повторяемого Q раз, q=1, …, Q для испытуемого объекта 100 и вычисление средней величины  этих инфракрасных откликов, и вычисление необходимого значимого размера х объекта 100 из следующего соотношения:
этих инфракрасных откликов, и вычисление необходимого значимого размера х объекта 100 из следующего соотношения:
х=А4·(RI)4+А3·(RI)3+A2·(RI)2+A1·(RI)1+A0
Стадия 5 для транспорта испытуемого объекта 100 к облучаемой подложке представляет собой автоматизированную стадию, на которой повторяется последовательность вспомогательных операций b) и с) стадии калибровки 2, как подробно описано выше.
Стадия 6 для регулирования положения объекта 100 относительно источника 32 и присоединенного детектора 40 представляет собой автоматизированную стадию, на которой повторяются вспомогательные операции d) стадии калибровки 2, как подробно описано выше.
Стадия 7 для определения фотонной интенсивности I пучка фотонов, ослабленной за счет прохождения сквозь объект 100, заключается в измерении активности, затем эти данные собирают, обрабатывают и анализируют, по существу, известным образом.
Стадия 8 сбора, обработки и анализа спектральных данных, полученных на автоматизированной стадии, на которой используются, по существу, известные алгоритмы вычислений, выполняется с помощью специально предназначенной программы, введенной в компьютер 170 прибора 200 для сбора, обработки и анализа данных.
Стадия 9 для определения относительного изменения Δρ/ρ плотности объекта 100 относительно плотности одного или нескольких объектов стандартной плотности emas схематически изображена на фигуре 14. На этой стадии проводится автоматизированное вычисление, где используется уравнение  и данные, найденные на предыдущих стадиях.
и данные, найденные на предыдущих стадиях.
Стадия обратного транспорта 10 объекта 100 в его местоположение на поворотном столе 70 является автоматизированной стадией, на которой повторяются вспомогательные операции е) стадии калибровки 2, подробно описанные выше.
В только что описанном способе подразумевается использование специального программного обеспечения. Это программное обеспечение включает в себя пять независимых модулей и главное диалоговое меню, с помощью которого оператор может выбрать один из пяти модулей для исполнения. Эти пять модулей включают следующие функции:
- первый модуль: определение плотности объекта, что включает стадию калибровки 3 и стадии от 4 до 10 фактического определения плотности,
- второй модуль: определение значимого размера объекта,
- третий модуль: калибровка положения прибора для определения значимого размера,
- четвертый модуль: калибровка положения прибора для определения ослабленной интенсивности фотонов,
- пятый модуль: организация файлов данных.
Пример
Были испытаны система и способ, описанные выше. Источник представлял собой 133Ва источник с активностью 10 миллиКюри. Продолжительность сбора данных составляла 20 минут.
Измерения выполнены на серии из 7 таблеток диоксида урана (UO2), имеющих следующие характеристики: диаметр, высота и плотность, которые приведены в таблице 1.
Таблетка №3 используется в качестве эталонной таблетки.
Целью измерений является точное определение относительного изменения плотности таблеток (1, 2, 4, 5, 6 и 7) относительно плотности стандартной таблетки 3, используя систему и способ согласно изобретению. Применимо следующее соотношение:
Величины диаметра таблеток, принятые "неизвестными", получают на стадии определения значимого размера, в данном случае диаметр таблетки, используя инфракрасное излучение.
Данные о количестве импульсов, зарегистрированных методом гамма-спектрометрии для каждой из шести таблеток, показаны в таблице II. Данные были получены путем тщательного отношения к способу временной последовательности, как описано выше
Стандартные отклонения измеренной вариации плотности оценивают путем вычисления распространения неопределенности. В таблице III эти результаты сопоставлены с теоретическим отклонением, приведенным производителем таблеток.
Эти результаты иллюстрирует диаграмма на фигуре 15. Кружками представлены величины Δρ/ρ, полученные из измерений, в то время как крестами представлены величины Δρ/ρ, приведенные производителем. Нанесенные интервалы показывают величины стандартного отклонения, вычисленные по данным, приведенным производителем.
Эти результаты показывают, что система и способ согласно изобретению позволяют детектировать относительное изменение плотности, составляющее приблизительно 6×10-3 относительно таблетки, выбранной в качестве стандартного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОЙ ОБРАБОТКИ ДЛЯ РАЗДЕЛЕНИЯ ИЛИ СКРАЙБИРОВАНИЯ ПОДЛОЖКИ ПУТЕМ ФОРМИРОВАНИЯ КЛИНОВИДНЫХ ПОВРЕЖДЕННЫХ СТРУКТУР | 2014 |
|
RU2674916C2 |
| Способ получения тонкослойных детекторов ионизирующих излучений для кожной и глазной дозиметрии, использующий стандартный детектор AlO:С на базе анион-дефектного корунда | 2018 |
|
RU2697661C1 |
| УСТАНОВКА ДЛЯ ИНСПЕКЦИИ ОБЪЕКТОВ | 2006 |
|
RU2390762C2 |
| СПОСОБ ОБРАБОТКИ ИНФРАКРАСНЫМ ЛАЗЕРНЫМ ИЗЛУЧЕНИЕМ С ЗАДАННОЙ ДЛИНОЙ ВОЛНЫ И ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЭТОГО СИСТЕМА | 2007 |
|
RU2430832C2 |
| СИСТЕМА ДИАГНОСТИКИ ПУЧКА ДЛЯ СИСТЕМЫ НЕЙТРОНЗАХВАТНОЙ ТЕРАПИИ | 2016 |
|
RU2695296C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ С ЭНЕРГЕТИЧЕСКИМ РАЗРЕШЕНИЕМ С АДАПТИРОВАННЫМ ПОРОГОМ ЭНЕРГИИ | 2014 |
|
RU2660386C2 |
| Способ расчетно-экспериментальной оценки радиационной стойкости интегральных схем к воздействию отдельных заряженных частиц, основанный на локальном лазерном облучении | 2017 |
|
RU2661556C1 |
| УСТРОЙСТВО ДЛЯ ТЕСТИРОВАНИЯ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2701875C1 |
| Способ настройки оптического детекторного прибора | 2017 |
|
RU2800574C1 |
| УСТРОЙСТВО И СПОСОБ ЭКРАНИРОВАНИЯ ИЗЛУЧЕНИЯ НА ОСНОВЕ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2721658C1 |
Изобретение относится к области неразрушающих способов анализа. Устройство для автоматического определения плотности объекта (100) включает в себя прибор (2) для определения значимого размера х указанного объекта (100); прибор (30) для определения интенсивности (I) фотонного пучка, ослабленной за счет прохождения сквозь указанный объект (100); прибор (200) для сбора, обработки и анализа данных; средства транспортировки (70, 72, 80, 82, 84, 86, 88) объекта (100); первое средство регулировки положения (74, 76, 78) объекта (100); второе средство регулировки положения (90, 92, 94, 96, 98) объекта (100). Способ применения указанного устройства включает стадии калибровки компонентов прибора (2) и прибора (30) и стадии фактического определения значимого размера объекта (100), которые выполняются для каждого объекта (100) в указанной партии объектов. Техническим результатом изобретения является повышение точности измерений. 4 н. и 29 з.п. ф-лы, 15 ил.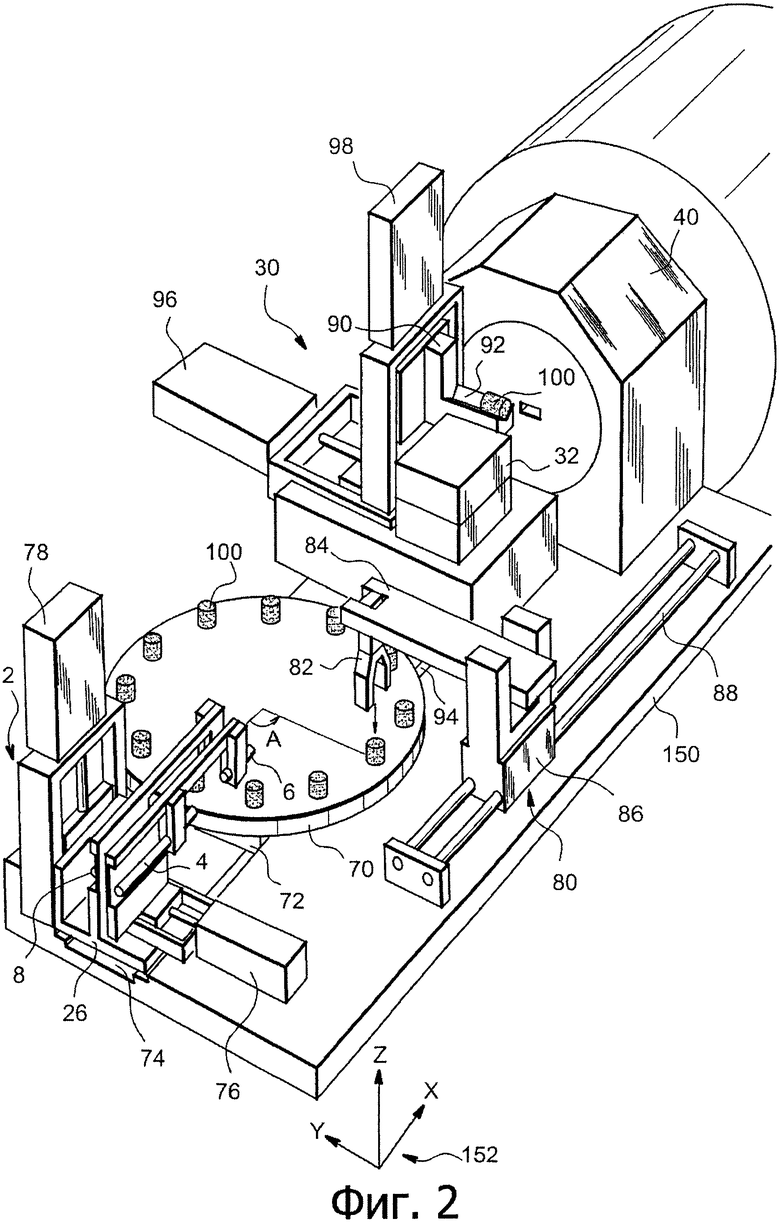
1. Устройство для автоматического определения плотности объекта (100), принадлежащего к партии объектов, отличающееся тем, что оно включает в себя:
прибор (2) для определения значимого размера указанного объекта (100);
прибор (30) для определения интенсивности (I) фотонного пучка, ослабленной за счет прохождения сквозь указанный объект (100);
прибор (200) для сбора, обработки и анализа данных;
средства транспортировки (70, 72, 80, 82, 84, 86, 88) объекта (100) к прибору (2) для определения значимого размера (х) и в направлении прибора (30) для определения ослабленной интенсивности пучка фотонов,
первое средство регулировки положения (74, 76, 78) объекта (100) относительно прибора (30) для определения ослабленной интенсивности пучка фотонов, и
второе средство регулировки положения (90, 92, 94, 96, 98) объекта (100) относительно прибора (30) для определения ослабленной интенсивности пучка фотонов,
и тем, что первое и второе средства регулировки положения способны перемещать объект (100) с точностью порядка одного микрометра относительно опорной пластины (150), на которой смонтированы элементы, входящие в состав устройства,
и тем, что положение объекта (100) относительно прибора (30) для определения ослабленной интенсивности (I) пучка фотонов регулируется в зависимости от значимого размера (х) указанного объекта (100).
2. Устройство по п.1, отличающееся тем, что прибор (200) для сбора, обработки и анализа данных включает в себя компьютер 170, на котором установлено специализированное программное обеспечение, выполняющее ряд инструкций и вычислительных алгоритмов, используемых в автоматической процедуре определения плотности объекта (100).
3. Устройство по п.1, отличающееся тем, что прибор (200) для сбора, обработки и анализа данных дает относительное изменение (Δρ/ρ) плотности (ρ) объекта (100) относительно известной плотности, по меньшей мере, одного объекта стандартной плотности emas, принадлежащего к той же самой партии объектов (100).
4. Устройство по п.1, отличающееся тем, что прибор (2) для определения значимого размера х объекта (100), включает в себя:
первый узел (4, 6) инфракрасного облучения, состоящий из первого инфракрасного излучателя (4) и первого инфракрасного приемника (6),
второй узел (8, 10) инфракрасного облучения, состоящий из второго инфракрасного излучателя (8) и второго инфракрасного приемника (10),
причем оба узла (4, 6 и 8, 10) инфракрасного облучения отстоят друг от друга на известном расстоянии d и генерируемые инфракрасные лучи идут параллельно друг другу,
и значимый размер (х) объекта (100) определяется по инфракрасному отклику, полученному при движении объекта (100) таким образом, что объект последовательно пересекает первый инфракрасный луч и второй инфракрасный луч в направлении, которое практически перпендикулярно осям (12, 14) обоих лучей, причем указанный инфракрасный отклик соответствует доли (24) второго луча, еще не пересекающегося с объектом (100), который еще пересекает половину (22) первого пучка.
5. Устройство по п.4, отличающееся тем, что прибор (2) для определения размера также содержит третий трансиверный узел (16, 18), расположенный на входной стороне первого узла (4, 6) инфракрасного облучения, с учетом второго узла (8, 10) инфракрасного облучения и предназначен для проведения предварительной регулировки интенсивности двух инфракрасных лучей.
6. Устройство по п.4, отличающееся тем, что значимый размер х объекта (100) определяют после перемещения указанного объекта QN раз и измерения Q инфракрасных откликов RI(q), где q означает число между 1 и Q, используя зависимость следующего типа:
х=А4(средний RI(q))4+А3(средний RI(q))3+A2(средний RI(q))2+A1(средний RI(q))1+А0,
где А4, А3, А2, A1, A0 представляют собой коэффициенты, полученные ранее с использованием аналогичной зависимости, по меньшей мере, для четырех объектов со стандартным размером edim, для которых измерен инфракрасный отклик RIedim.
7. Устройство по п.1, отличающееся тем, что прибор (30) для определения ослабленной интенсивности пучка фотонов, представляет собой гамма-спектрометр, в состав которого входят:
узел (32), состоящий из источника излучения и коллиматора,
узел (40), состоящий из детектора и коллиматора,
система (48) для сбора и подсчета гамма-фотонов.
8. Устройство по п.7, отличающееся тем, что система (48) для сбора и подсчета включает в себя:
германиевый детектор высокой плотности,
предварительный усилитель (50);
процессор (52) преобразования цифровых сигналов;
модуль высокого напряжения (54);
сетевой модуль (56);
компьютер (170) для сбора данных;
криостат (60).
9. Устройство по п.1, отличающееся тем, что транспортирующие средства (70, 72, 80, 82, 84, 86, 88) включают в себя поворотный стол (70) и шаговый электродвигатель (72), передвигающий указанный поворотный стол (70).
10. Устройство по п.1, отличающееся тем, что транспортирующие средства включают в себя манипулятор (80).
11. Устройство по любому из пп.1-10, отличающееся тем, что манипулятор (80) представляет собой механический манипулятор, оборудованный захватывающим зажимом (82), предназначенным для захвата и перемещения вниз объекта (100).
12. Устройство по п.1, отличающееся тем, что первые средства для регулировки положения включают в себя:
салазки (74) для закрепления положения основания (26) прибора (2) для определения значимого размера объекта вдоль направления X;
исполнительный механизм (76) для перемещения первого узла инфракрасного облучения (4, 6) ближе или дальше от второго узла инфракрасного облучения (8, 10) указанного прибора (2) по направлению Y перпендикулярно направлению X;
исполнительный механизм (78) для перемещения указанного основания (26) прибора (2) вдоль направления Z, перпендикулярного плоскости (X, Y).
13. Устройство по п.1, отличающееся тем, что первые средства для регулировки положения включают в себя подложку (90) для облучения, на которую устанавливают объект (100) между источником (32) и детектором (40) в гамма-спектрометрическом приборе (30) для определения ослабленной интенсивности фотонного пучка, который прошел сквозь объект (100).
14. Устройство по п.13, отличающееся тем, что вторые средства для регулировки положения включают в себя:
салазки (94) для закрепления положения подложки (90) для облучения вдоль направления X;
исполнительный механизм (96) для перемещения указанно по направлению X,
исполнительный механизм (98) для перемещения указанной подложки (90) для облучения между источником (32) и детектором (40) в приборе (30) для определения ослабленной интенсивности фотонного пучка, который прошел сквозь объект (100) вдоль направления Z, перпендикулярного плоскости (X, Y).
15. Способ применения устройства для автоматического определения плотности объекта (100), принадлежащего к партии объектов, по любому из пп.1-14, указанное устройство включает в себя прибор (2) для определения значимого размера (х) объекта (100) и прибор (30) для определения интенсивности (I) фотонного пучка, ослабленной за счет прохождения сквозь указанный объект (100), отличающийся тем, что способ включает в себя следующие стадии калибровки:
стадию 1 для калибровки положения двух блоков инфракрасного излучения (4, 6 и 8, 10) в приборе (2) для определения значимого размера объектов (100);
стадию 2 для калибровки положения подложки (90) для облучения в гамма-спектрометрическом приборе (30), используемом для определения интенсивности фотонного пучка, ослабленной в результате прохождения сквозь объекты (100);
стадию 3 для калибровки измерения узла источник-детектор (32, 40) прибора (30) и тем, что способ включает в себя стадии фактического определения значимого размера (х) объекта (100), которые выполняются для каждого объекта (100) в указанной партии объектов.
16. Способ по п.15, отличающийся тем, что первая стадия калибровки включает ввод оператором ряда входных параметров с помощью модуля диалогового режима, причем эти параметры включают:
конфигурацию компонентов, которые имеют микрометрическое перемещение, в том числе два исполнительных механизма (76, 78),
конфигурацию поворотного стола (70), другими словами характер объектов, которые принимают различные местоположения на поворотном столе 70,
положение, принимаемое объектами стандартного размера edim, на поворотном столе (70),
положение Zизм вдоль направления Z станины (26) прибора (2),
положения Y(l) и Y(N), ограничивающие интервал перемещения первого инфракрасного узла (4, 6) вдоль направления Y,
стадию перемещения (INT) первого инфракрасного узла (4, 6) вдоль направления Y.
17. Способ по п.16, отличающийся тем, что первая стадия калибровки также включает следующие операции:
a) перемещение станины (26) вдоль направления Z вплоть до положения Zизм,
b) вращательное перемещение поворотного стола (70) для того, чтобы транспортировать объект стандартного размера edim вплоть до его положения начального измерения относительно прибора (2),
c) перемещение первого инфракрасного узла (4, 6) вдоль направления Y вплоть до его исходного положения Y(1),
d) поступательное перемещение первого инфракрасного узла (4, 6) вдоль направления Y с последовательными приращениями INT, удаление его из второго инфракрасного узла (8, 10), зафиксированного в положении YFIX между положениями Y(1) и Y(N), при одновременном определении инфракрасного отклика RI(n) объекта edim, в соответствии с каждым положением Y(n),
e) расчет оптимального инфракрасного отклика RIОРТ,
f) расчет оптимального положения YOPT первого инфракрасного узла (4, 6) относительно второго инфракрасного узла (8, 10).
18. Способ по п.17, отличающийся тем, что операция d) включает в себя следующие вспомогательные операции:
d-1) вращательное перемещение поворотного стола (70) для того, чтобы транспортировать объект стандартного размера edim вплоть до положения конечного измерения,
d-2) измерение инфракрасного отклика RI(n) указанного объекта стандартного размера edim,
d-3) вращательное перемещение поворотного стола (70) для того, чтобы привести объект стандартного размера edim в положение начального измерения.
19. Способ по п.17, отличающийся тем, что оптимальный инфракрасный отклик шорт получают, используя соотношение:
RIОРТ=1/2(RIMAX-RIMIN),
где RIMIN означает минимальное значение насыщения инфракрасного отклика;
и RIMAX представляет собой максимальное значение насыщения инфракрасного отклика.
20. Способ по п.17, отличающийся тем, что операцию f) расчета оптимального положения YОРТ выполняют следующим образом:
если 
то YOPT=Y(j)
если 
то YOPT=Y(k)
где RI(j) и RI(k) представляют собой два ранее вычисленных значения инфракрасного отклика, между которыми находится требуемый оптимальный отклик RIОРТ, что соответствуют двум положениям Y(j) и Y(k) первого инфракрасного узла (4, 6) соответственно.
21. Способ по п.15, отличающийся тем, что вторая стадия калибровки включает ввод оператором ряда входных параметров с помощью модуля диалогового режима, причем эти параметры включают:
конфигурацию компонентов, которые имеют микрометрическое перемещение, в том числе два исполнительных механизма (96, 98),
конфигурацию поворотного стола (70), другими словами характер объектов, которые принимают различные местоположения на поворотном столе,
положение, принимаемое объектами emas, на поворотном столе (70),
измерение продолжительности или времени счета,
положения Z(1) и Z(N), ограничивающие интервал перемещения облучаемой подложки (90) вдоль направления Z,
число М измерений интенсивности пучка фотонов, ослабленной за счет прохождения сквозь каждый объект стандартной плотности, для каждого положения Z(i), принимаемого облучаемой подложкой, для i=1, …, N.
22. Способ по п.21, отличающийся тем, что вторая стадия калибровки также включает следующие операции:
a) определение значимого размера xemas каждого объекта стандартной плотности emas,
b) вращательное перемещение поворотного стола 70 на угол А для того, чтобы транспортировать указанный объект стандартной плотности emas в промежуточное положение, в котором объект будет захвачен захватным устройством (80),
d) регулирование фактического положения облучаемой подложки (90) относительно источника (32) и присоединенного детектора (40),
e) обратный транспорт объекта стандартной плотности emas на поворотный стол (70) с повторением такой же последовательности операций, как описанные в операции с), но в обратном порядке.
23. Способ по п.22, отличающийся тем, что операция с), расположение объекта emas на облучаемой подложке (90), включает в себя следующие промежуточные операции:
с-1) перемещение облучаемой подложки (90) вниз, вдоль направления Z,
с-2) перемещение захватного устройства (80) из положения ожидания в вертикальное положение в соответствии с промежуточным положением объекта emas,
с-3) захват объекта emas захватным устройством (80), с последующим транспортированием объекта в вертикальное положение в соответствии с верхней гранью (92) облучаемой подложки (90),
с-4) перемещение облучаемой подложки (90) вплоть до положения Z(l), вверх и вдоль направления Z,
с-5) опускание объекта emas вниз на верхнюю грань (92) облучаемой подложки (90), с использованием захватного устройства (80),
с-6) перемещение и возврат захватного устройства (80) вплоть до положения ожидания,
с-7) приведение объекта emas в контакт с ограничителем на верхней грани (92) вдоль направления Y.
24. Способ по п.22, отличающийся тем, что операция d), регулирование фактического положения облучаемой подложки (90) относительно источника (32) и присоединенного детектора (40), включает в себя следующие вспомогательные операции:
d-1) поступательное перемещение облучаемой подложки (90) вдоль направления Z между двумя заданными положениями Z(1) и Z(N),
d-2) для каждого положения Z(i), i=1, …, N, облучение объекта стандартной плотности emas пучком фотонов несколько (М) раз, что приводит к ряду значений ослабленной интенсивности I(i,j), где i=l,..., N означает число последовательных положений Z(i), принимаемых облучаемой подложкой (90), и j=1, …, М означает число облучений, выполненных в каждом положении Z(i),
d-3) расчет оптимального положения (ZОРТ) облучаемой подложки (90), исходя из полиномиальной регрессии четвертого порядка положений Z(i) относительно значений ослабленной интенсивности I(i,j), причем эта полиномиальная регрессия четвертого порядка задается и интегрируется как элемент данных прибора (200) для сбора, обработки и анализа данных.
25. Способ по п.15, отличающийся тем, что третья стадия калибровки результатов измерения в устройстве (30) для гамма-спектрометрического определения включает следующие автоматизированные операции:
a) измерение интенсивности Iemas пучка фотонов, ослабленной за счет прохождения сквозь объект стандартной плотности emas,
b) расчет массового коэффициента ослабления µm для объекта стандартной плотности, и затем для всех объектов в наборе объектов, используя следующее соотношение:
26. Способ по п.15, отличающийся тем, что стадия фактического определения также включает в себя:
стадию 4 для определения значимого размера х испытуемого объекта (100),
стадию 5 для транспортирования объекта 100 в направлении облучаемой подложки (90),
стадию 6 для регулирования положения объекта (100) путем корректировки положения облучаемой подложки (90) относительно источника (32) и присоединенного детектора (40),
стадию 7 для определения ослабленной интенсивности I пучка фотонов, проходящего сквозь объект (100),
стадию 8 для сбора, обработки и анализа полученных спектров,
стадию 9 для определения относительного изменения Δρ/ρ плотности ρ объекта (100), относительно плотности одного или нескольких объектов стандартной плотности emas,
стадию 10 для обратного транспорта объекта (100) вплоть до его местоположения на поворотном столе (70).
27. Способ по п.26, отличающийся тем, что на стадии 4 для определения значимого размера х испытуемого объекта (100) оператор вводит набор вводимых параметров, используя модуль диалогового режима, причем эти параметры включают:
конфигурацию поворотного стола (70), другими словами, характер объектов, которые принимают различные местоположения на поворотном столе,
местоположение, принимаемое объектом (100) на поворотном столе (70),
положение Zизм вдоль направления Z станины (26) прибора (2),
количество Р инфракрасных измерений для каждого объекта стандартного размера edim(n), n=1, …, N, где N число объектов стандартного размера,
количество Q инфракрасных измерений для объекта (100).
28. Способ по п.27, отличающийся тем, что стадия 4 для определения значимого размера х испытуемого объекта (100) также включает следующие операции:
a) перемещение станины (26) в приборе (2) вдоль направления Z вплоть до положения Zизм,
b) перемещение первого инфракрасного узла (4, 6) вдоль направления Y, вплоть до положения Yизм, определенного как: Yизм=YOPT+(Xedim-XedimAVE), где
YОРТ означает оптимальное положение, полученное на стадии калибровки 1,
Xedim представляет собой размер объекта edim стандартного размера, использованного в ходе первой стадии калибровки,
XedimAVE представляет собой значимый средний размер всех объектов стандартного размера edim,
c) измерение инфракрасного отклика RI(p), повторяющегося Р раз, р=1, …, Р для N объектов стандартного размера edim(n), n=1, …, N, что приводит к набору величин RI(n, p),
d) фактическое вычисление значимого размера х объекта (100).
29. Способ по п.28, отличающийся тем, что стадию d) фактического вычисления значимого размера х объекта (100) выполняют следующим образом:
d-1) используют полиномиальную регрессию 4-го порядка значимых размеров xеdim(n) для каждого из N объектов стандартного размера edim, как функцию средней величины  инфракрасных откликов каждого объекта стандартного размера edim(n) для того, чтобы рассчитать коэффициенты А0, A1, А2, А3, А4 в соотношении следующего типа:
инфракрасных откликов каждого объекта стандартного размера edim(n) для того, чтобы рассчитать коэффициенты А0, A1, А2, А3, А4 в соотношении следующего типа:
xedim(n)=А4·(RIedimAVE(N))4+A3·(RIedimAVE(n))3+A2·(RIedimAVE(n))2+A1·(RIedimAVE(n))1+A0,
d-2) измеряют инфракрасный отклик RI(q), повторяемый Q раз, q=1, …, Q для испытуемого объекта (100), и вычисление средней величины  этих инфракрасных откликов, и вычисление значимого размера х объекта (100) из следующего соотношения:
этих инфракрасных откликов, и вычисление значимого размера х объекта (100) из следующего соотношения:
х=А4·(RI)4+А3·(RI)3+A2·(RI)2+A1·(RI)1+A0.
30. Применение устройства по любому из пп.1-14 для тестирования полученных объектов (100).
31. Применение по п.30, в котором объекты (100) представляют собой таблетки ядерного топлива.
32. Применение способа по любому из пп.15-29 для тестирования полученных объектов (100).
33. Применение по п.32, в котором объекты (100) представляют собой таблетки ядерного топлива.
| Been K | |||
| Non-destructive Soil Bulk density Measurement by X-ray Attenuation, Geotechnical Testing Journal, GTJODJ, Vol.4, No | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И СОРТИРОВКИ ТАБЛЕТОК ЯДЕРНОГО ТОПЛИВА | 2001 |
|
RU2209477C2 |
| АВТОМАТИЧЕСКИЙ РАДИОИЗОТОПНЫЙ ИЗМЕРИТЕЛЬ ПЛОТНОСТИ | 1995 |
|
RU2109265C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЛОТНОСТИ И МАССОВОЙ ДОЛИ ЖИДКОЙ ФАЗЫ ПУЛЬП В ТРУБОПРОВОДАХ | 1994 |
|
RU2082152C1 |
| 7-Бензил-9-бензоил-3-(4-бромфенил)-8-фенил-1,4-диокса-2,7-диазаспиро[4.4]нон-2,8-диен-6-он, обладающий противомикробной активностью | 2022 |
|
RU2798463C1 |

