Изобретение относится к конвейеростроению, а именно к ленточным конвейерам с однобарабанными приводами.
Известен ленточный конвейер, содержащий огибаемый конвейерной лентой и установленный на шарнирных стойках приводной барабан с возможностью поворота стоек в вертикальной плоскости, неподвижно установленный отклоняющий барабан для ленты с возможностью прижатия к нему приводного барабана (Полунин В.Т., Гуленко Г.Н. Конвейеры для горных предприятий. М., Недра, 1978, с.83, рис.2.29, а).
Недостатком известного конвейера является сложность регулирования величины усилия прижатия приводного барабана к отклоняющему путем перестановки опорных стоек приводного барабана при неподвижном размещении кинематически связанного с ним приводного блока. Поэтому при перестановке стоек необходимо с помощью дополнительных приспособлений фиксировать приводной барабан соосно с тихоходным валом привода. Кроме того, из-за смещения приводного барабана при его прижатии к прижимному барабану привод должен быть оснащен эластичной муфтой с возможностью передачи ею крутящего момента значительной величины.
Известен ленточный конвейер с однобарабанным приводом (прототип), содержащий бесконечно замкнутую в вертикальной плоскости ленту с формированием грузонесущей и нерабочей ветвей с их опиранием на роликоопоры, последовательно огибаемый лентой приводной и отклоняющий барабаны (Пухов Ю.С. Рудничный транспорт. М.: Недра, 1991, с.245, рис.15.1, а, б).
Однако недостатками известного ленточного конвейера являются невозможность регулирования величины тягового усилия, передаваемого ленте приводным барабаном при плановом изменении величины грузопотока, а также невозможность автоматического увеличения тягового усилия при случайных перегрузках конвейера, сопровождающихся пробуксовыванием ленты относительно приводного барабана.
Техническим результатом изобретения является обеспечение возможности регулирования величины тягового усилия, передаваемого ленте приводным барабаном при плановом изменении величины грузопотока, а также возможность автоматического увеличения тягового усилия при случайных перегрузках конвейера, сопровождающихся пробуксовыванием ленты относительно приводного барабана.
Технический результат достигается тем, что в ленточном конвейере с однобарабанным приводом, содержащим бесконечно замкнутую в вертикальной плоскости ленту с формированием грузонесущей и нерабочей ветвей с их опиранием на роликоопоры, последовательно огибаемый лентой приводной и отклоняющий барабаны, согласно изобретению корпуса подшипников оси отклоняющего барабана установлены с возможностью смещения в наклонных направляющих с помощью винтовой пары, направляющие закреплены на раме конвейера с помощью размещенных в верхней части направляющих шарниров, а нижняя часть направляющих со стороны приводного барабана подпружинена к раме пружинами, а с противоположной стороны направляющие размещены с возможностью их взаимодействия с закрепленным на раме упорами, при этом направляющие ориентированы по нормали к среднему углу β наклона сбегающей с приводного барабана нерабочей ветви ленты, определяемому как полусумма минимального β1 и максимального β2 углов наклона сбегающей с приводного барабана нерабочей ветви ленты, соответствующих крайним положениям отклоняющего барабана на направляющих, а над нерабочей ветвью ленты по ходу ее движения за отклоняющим барабаном установлено опорное приспособление, при этом жесткость пружин выбрана из двух условий - превышения их рабочего усилия над окружным усилием за счет крутящего момента, создаваемого равнодействующей Т натяжений S нерабочей ветви ленты в точках ее набегания и сбегания с отклоняющего барабана при любом его положении на направляющих, при работе конвейера без пробуксовывания ленты по приводному барабану - превышения указанной выше равнодействующей над рабочим усилием пружин при пробуксовывании ленты по приводному барабану. Опорное приспособление может быть выполнено в виде ролика или опоры скольжения криволинейной формы с прогибом в сторону нерабочей ветви ленты.
Ленточный конвейер представлен на чертежах, где на фиг.1 показан вид сбоку в зоне установки приводного и отклоняющего барабанов, на фиг.2 - вариант огибания нерабочей ветвью ленты опоры скольжения, на фиг.3 - положение отклоняющего барабана после возникновения пробуксовывания ленты по приводному барабану.
Ленточный конвейер с однобарабанным приводом содержит бесконечно замкнутую в вертикальной плоскости ленту с формированием грузонесущей 1 и нерабочей 2 ветвей, которые опираются соответственно на роликоопоры 3 и 4, последовательно огибаемые лентой приводной барабан 5 и отклоняющий барабан 6. Отклоняющий барабан 6 огибается сбегающей с приводного барабана 5 нерабочей ветвью 2 ленты. При этом корпуса 7 подшипников оси 8 отклоняющего барабана 6 установлены с возможностью смещения в наклонных направляющих 9 с помощью винтовой пары 10. Направляющие 9 закреплены на раме 11 конвейера с помощью размещенных в верхней части направляющих 9 шарниров 12, а нижняя часть направляющих 9 со стороны приводного барабана 5 подпружинена к раме 10 пружинами 13, а с противоположной стороны размещена с возможностью ее взаимодействия с закрепленными на раме 11 упорами 14. Направляющие 9 ориентированы по нормали к среднему углу β наклона сбегающей с приводного барабана 5 нерабочей ветви 2 ленты, определяемому как полусумма минимального β1 и максимального β2 углов наклона сбегающей с приводного барабана 5 нерабочей ветви 2 ленты, соответствующих крайним положениям отклоняющего барабана 6 на направляющих 9. Над нерабочей ветвью 2 ленты по ходу ее движения за отклоняющим барабаном 6 установлено опорное приспособление, которое может быть выполнено в виде ролика 15 (фиг.1) или опоры скольжения 16 криволинейной формы (фиг.2) с прогибом в сторону нерабочей ветви 2 ленты. 17 и 18 - минимальные просветы между отклоняющим барабаном 6 в его крайнем верхнем положении и соответственно приводным барабаном 5 и грузонесущей ветвью 1 ленты. α1 и α2 минимальный и максимальный углы обхвата лентой приводного барабана 5, соответствующие крайнему нижнему и крайнему верхнему положению отклоняющего барабана 6. Жесткость пружин 13 выбрана из двух условий: 1 (превышения их рабочего усилия над усилием за счет крутящего момента, создаваемого равнодействующей Т натяжений S нерабочей ветви 2 ленты в точках ее набегания и сбегания с отклоняющего барабана 6 при любом его положении на направляющих 9, при работе конвейера без пробуксовывания ленты по приводному барабану 5 и 2) превышения указанной выше равнодействующей над рабочим усилием пружин 13 при пробуксовывании ленты по приводному барабану 5.
Ленточный конвейер действует следующим образом. При грузопотоке, соответствующем минимальному значению тягового усилия, передаваемого ленте 1, 2 приводным барабаном 5, отклоняющий барабан 6 размещают в самом нижнем положении, при котором сбегающая с приводного барабана 5 нерабочая ветвь 2 ленты наклонена к горизонту под углом β1 при огибании лентой приводного барабана 5 на угол α1. При этом нерабочая ветвь 2 ленты размещается после схода с отклоняющего барабана 6 параллельно грузонесущей ветви 1 с просветом h между ними, определяемом конструкцией роликовых опор 3, 4 и рамы 11 средней части конвейера. Отклоняющий барабан 6 в этом положении фиксируется за счет взаимодействия шарнирно (12) закрепленной направляющей 9 с упорами 14 и пружинами 13, жесткость которых обеспечивает компенсацию незначительного по величине крутящего момента, создаваемого равнодействующей натяжений нерабочей ветви 2 ленты в точках набегания и сбегания с отклоняющего барабана 6. При плановом (или неплановом) увеличении грузопотока корпуса 7 подшипников отклоняющего барабана 6 с помощью винтовой пары 10 смещают по направляющим 9 в сторону подшипника 12 и фиксируют в новом положении при увеличенном по сравнению с β1 угле наклона сбегающей с приводного барабана 5 нерабочей ветви 2 ленты, что соответствует большему по сравнению с углом α1 углу обхвата лентой приводного барабана 5 и передаваемому им ленте тягового усилия. При этом сбегающая с отклоняющего барабана 6 нерабочая ветвь 2 ленты располагается в пролете между отклоняющим барабаном 6 и роликопорой 15 (фиг.1) или опорой скольжения 16 (фиг.2) наклонно (штрихпунктир на фиг.1 и 2) по отношению к грузонесущей ветви 1 ленты. Предельное положение отклоняющего барабана 6, при котором обеспечивается максимально возможное тяговое усилие, передаваемое приводным барабаном 5 ленте, соответствует его минимальным зазорам 17 и 18 по отношению к приводному барабану 5 и грузонесущей ветви 1 ленты. При этом положении отклоняющего барабана 6 сбегающая с приводного барабана 5 нерабочая ветвь 2 ленты наклонена к горизонту под углом β2, а угол обхвата лентой приводного барабана 5 максимально возможен и равен α2.
При пробуксовывании ленты по приводному барабану 5 (из-за резкого увеличения сверхзапланированного грузопотока, увлажнении рабочей поверхности приводного барабана 5 и других факторов) натяжение S ленты в точке ее сбегания с приводного барабана резко увеличивается, становясь близким по величине к натяжению в точке набегания ленты на приводной барабан 5. Поэтому за счет крутящего момента, создаваемого значительно увеличенной по сравнению с описанным выше режимом равнодействующей Т натяжений S нерабочей ветви 2 ленты в точках ее набегания и сбегания с отклоняющего барабана 6, направляющие 9 повернутся относительно шарнира 12 против часовой стрелки, преодолевая рабочее усилие пружин 13 (фиг.3). При этом отклоняющий барабан 6 через ленту будет прижат к приводному барабану 5, обеспечивая дополнительную силу трения в точке сбегания ленты с приводного барабана 5 и соответствующее увеличение тягового усилия, пропорциональное тяговому фактору. Таким образом, при пробуксовывании ленты по цилиндрической поверхности приводного барабана 5 отклоняющий барабан 6 автоматически превращается в прижимной с соответствующим увеличением тягового усилия, передаваемого ленте приводным барабаном 5. После устранения или прекращения действия факторов, способствующих пробуксовыванию ленты по приводному барабану 5 режим работы отклоняющего барабана 6 восстанавливается в соответствии с его назначением.
Отличительные признаки изобретения позволяют регулировать величину тягового усилия, передаваемого ленте приводным барабаном при плановом изменении величины грузопотока, а также обеспечивают возможность автоматического увеличения тягового усилия при случайных перегрузках конвейера, сопровождающихся пробуксовыванием ленты по приводному барабану.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОЛОВНОЙ ОДНОБАРАБАННЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА С ПРИЖИМНОЙ ЛЕНТОЙ | 2012 |
|
RU2497741C1 |
| КОНВЕЙЕР ЛЕНТОЧНЫЙ | 2004 |
|
RU2269465C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2004 |
|
RU2269466C1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2010 |
|
RU2440284C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЛЕНТОЧНОГО КОНВЕЙЕРА С РАЗМЕЩЕНИЕМ НЕРАБОЧЕЙ ВЕТВИ ЛЕНТЫ С ВОЗМОЖНОСТЬЮ ЕЕ ВЗАИМОДЕЙСТВИЯ С РОЛИКООПОРАМИ ГРУЗОНЕСУЩЕЙ ВЕТВИ ЛЕНТ | 2010 |
|
RU2456570C1 |
| ТОРМОЗ ДЛЯ НАКЛОННОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2008 |
|
RU2402477C2 |
| МНОГОПРИВОДНОЙ ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 2011 |
|
RU2463236C1 |
| ТОРМОЗ ДЛЯ НАКЛОННОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2007 |
|
RU2350542C1 |
| ПРОМЕЖУТОЧНЫЙ ЛИНЕЙНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2012 |
|
RU2487071C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2004 |
|
RU2269467C1 |
Конвейер содержит замкнутую в вертикальной плоскости ленту, огибающую приводной (5) и отклоняющий (6) барабаны. Корпуса (7) подшипников оси (8) отклоняющего барабана установлены с возможностью смещения в наклонных направляющих (9), шарнирно закрепленных на раме конвейера. Нижняя часть направляющих со стороны приводного барабана подпружинена к раме, а с противоположной стороны размещена с возможностью ее взаимодействия с закрепленными на раме упорами (14). Направляющие ориентированы по нормали к среднему углу наклона сбегающей с приводного барабана нерабочей ветви ленты, определяемому как полусумма минимального и максимального углов наклона сбегающей с приводного барабана нерабочей ветви ленты, соответствующих крайним положениям отклоняющего барабана на направляющих. Над нерабочей ветвью ленты по ходу ее движения за отклоняющим барабаном установлено опорное приспособление. Жесткость пружин выбрана из двух условий: - превышения их рабочего усилия над окружным усилием за счет крутящего момента, создаваемого равнодействующей натяжений нерабочей ветви ленты в точках ее набегания и сбегания с отклоняющего барабана при любом его положении на направляющих, при работе конвейера без пробуксовывания ленты по приводному барабану, - превышения указанной выше равнодействующей над рабочим усилием пружин при пробуксовывании ленты по приводному барабану. Обеспечивается регулирование величины тягового усилия. 2 з.п. ф-лы, 3 ил.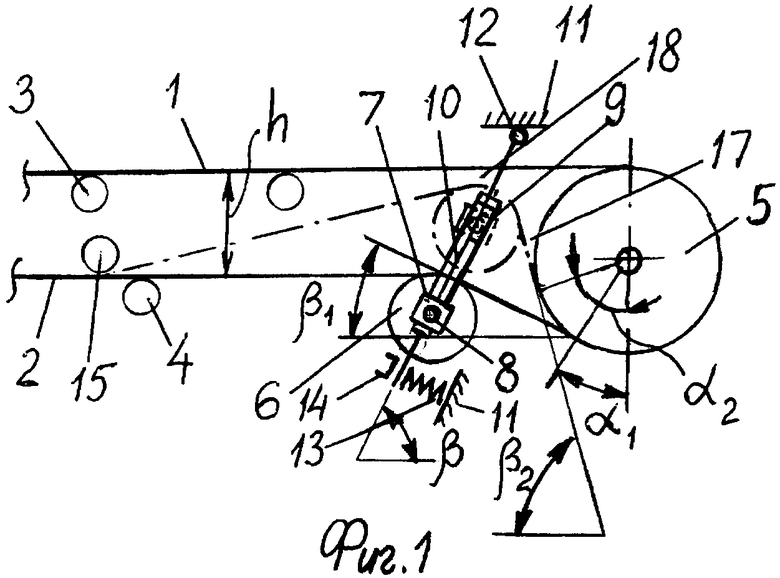
1. Ленточный конвейер с однобарабанным приводом, содержащий бесконечно замкнутую в вертикальной плоскости ленту с формированием грузонесущей и нерабочей ветвей с их опиранием на роликоопоры, последовательно огибаемый лентой приводной и отклоняющий барабаны, отличающийся тем, что корпуса подшипников оси отклоняющего барабана установлены с возможностью смещения в наклонных направляющих с помощью винтовой пары, направляющие закреплены на раме конвейера с помощью размещенных в верхней части направляющих шарниров, а нижняя часть направляющих со стороны приводного барабана подпружинена к раме пружинами, а с противоположной стороны направляющие размещены с возможностью их взаимодействия с закрепленными на раме упорами, при этом направляющие ориентированы по нормали к среднему углу β наклона сбегающей с приводного барабана нерабочей ветви ленты, определяемому как полусумма минимального β1 и максимального β2 углов наклона сбегающей с приводного барабана нерабочей ветви ленты, соответствующих крайним положениям отклоняющего барабана на направляющих, а над нерабочей ветвью ленты по ходу ее движения за отклоняющим барабаном установлено опорное приспособление, при этом жесткость пружин выбрана из двух условий - превышения их рабочего усилия над окружным усилием за счет крутящего момента, создаваемого равнодействующей Т натяжений S нерабочей ветви ленты в точках ее набегания и сбегания с отклоняющего барабана при любом его положении на направляющих, при работе конвейера без пробуксовывания ленты по приводному барабану, - превышения указанной выше равнодействующей над рабочим усилием пружин при пробуксовывании ленты по приводному барабану.
2. Конвейер по п.1, отличающийся тем, что опорное приспособление выполнено в виде ролика.
3. Конвейер по п.1, отличающийся тем, что опорное приспособление выполнено в виде опоры скольжения криволинейной формы с прогибом в сторону нерабочей ветви ленты.
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2004 |
|
RU2269467C1 |
| Крутонаклонный ленточный конвейер | 2001 |
|
RU2220894C2 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2000 |
|
RU2184693C2 |
| US 5305868 A, 26.04.1994 | |||
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ОХЛАЖДАЮЩЕГО | 0 |
|
SU382913A1 |

