Изобретения относятся к космическим аппаратам (КА), оборудованным для проведения на низкой околоземной орбите экспериментов в области производства материалов в условиях сверхглубокого вакуума, а также к способам проведения данных экспериментов.
В таких условиях на борту КА могут быть получены, в частности, полупроводниковые гетероэпитаксиальные структуры методом молекулярно-лучевой эпитаксии (МЛЭ). Подобные КА должны периодически обслуживаться с целью ремонта и замены оборудования, пополнения расходных материалов, приема готовой продукции, смены экипажей и т.д. Эти КА могут входить в состав пилотируемой орбитальной станции или быть автономными модулями, обслуживаемыми с борта станции или с Земли.
Существующие космические средства позволяют достигать и поддерживать, в течение технологического цикла получения образцов, глубину вакуума на уровне 10-14-10-17 Торр. Такая чистота окружающей среды необходима для выращивания высококачественных монокристаллических тонких пленок и многослойных структур, состоящих из разнообразных химических соединений и твердых растворов, обладающих свойствами металлов, изоляторов или полупроводников.
К данным средствам относится молекулярный защитный экран (МЗЭ), предложенный в 1976 г. Л.Мелфи, который вместе с соавторами провел теоретический анализ состояния газовой среды вокруг дискообразного экрана, летящего в околоземном пространстве, и сформулировал концепцию орбитальной лаборатории со сверхразреженной средой.
Работа, проводившаяся при поддержке НАСА, показала, что если МЗЭ (полированный диск из нержавеющей стали) будет двигаться вокруг Земли на высоте 200-600 км, то в его кильватерной области образуется конусный след, практически лишенный вещества (фиг.1, 2).
Из патентных источников известен КА, содержащий грузовой отсек с манипулятором, технологическую и научную аппаратуру для работ в сверхглубоком вакууме, размещенную на МЗЭ и выводимую с помощью манипулятора из отсека в удаленную от КА область пространства, где эта аппаратура помещается в область следа за МЗЭ (патент [1] US 4723734 A (R.J.NAUMANN), 09.02.1988).
Подобный КА и способ проведения с его помощью исследований по МЛЭ были реализованы в 1994 г. NASA через космический коммерческий центр МЛЭ (проект WSF - Wake Shield Facility). Специализированный модуль WSF был разработан как свободнолетящий аппарат (фиг.2). Обслуживание аппарата и его подготовка к очередному пуску, с помощью МТКК Space Shuttle, проводятся на Земле.
Недостатком известного КА [1] и подобных ему является применение МТКК для выведения на орбиту и снятия с орбиты модуля с оборудованием типа WSF, что ограничивает время проведения исследований в сверхглубоком вакууме несколькими сутками и резко увеличивает затраты на эти исследования.
Наиболее близким аналогом предлагаемого устройства служит КА, содержащий последовательно расположенные герметичный отсек и шлюзовую камеру, имеющую входной люк для доступа в нее из герметичного отсека и выходной люк для доступа в открытый космос, манипулятор, установленный снаружи КА, установку МЛЭ с технологической и научной аппаратурой, размещенную в транспортном положении в шлюзовой камере, а также МЗЭ (патент [2] RU 2181094 С1 (ЦНИИМАШ), 10.04.2002).
Данный КА [2] является многофункциональным обслуживаемым аппаратом, рассчитанным на проведение длительных многоцелевых научно-прикладных исследований в околоземном пространстве (фиг.3).
С помощью этого КА реализуется способ проведения исследований в сверхглубоком космическом вакууме за МЗЭ, включающий выведение в открытый космос из шлюзовой камеры установки МЛЭ вместе с МЗЭ, их удаление от КА, ориентацию экрана в положение защиты установки МЛЭ от внешнего потока среды, включение аппаратуры установки МЛЭ для проведения исследований в области следа за экраном и возврат установки МЛЭ в шлюзовую камеру по завершении данных исследований (см. указанный патент [2]).
Недостатками известного КА и реализуемого им способа являются сложность обслуживания (в частности, космонавтами) установки МЛЭ, довольно жесткое требование к ориентации КА во время работы установки МЛЭ в области следа за МЗЭ, а также ограниченные возможности перемещения экрана с установкой МЛЭ в зону минимального влияния собственной внешней атмосферы КА.
Отмеченные недостатки обусловлены, главным образом, конструктивным исполнением системы выдвижения установки МЛЭ и МЗЭ из шлюзовой камеры в космос. Это выдвижение система производит по продольной оси КА, которая при вакуумных исследованиях должна совпадать с вектором скорости КА. При этом плоскость МЗЭ может быть установлена только перпендикулярно этой оси КА. Данная система также занимает много места внутри шлюзовой камеры, затрудняя необходимые работы с различным оборудованием, в т.ч. с самой установкой МЛЭ.
Задачей предлагаемых изобретений является преодоление указанных выше недостатков путем разработки нового конструктивного решения КА и способа проведения с его помощью исследований по МЛЭ в следе за МЗЭ.
Техническим результатом изобретений служит повышение информативности и качества проводимых исследований по МЛЭ, а также уменьшение затрат на их проведение.
Указанная задача решается, а технический результат достигается тем, что в предлагаемом КА, в отличие от известного [2], крышка выходного люка шлюзовой камеры выполнена отделяемой, МЗЭ жестко прикреплен к указанной крышке с внешней ее стороны и снабжен узлом крепления к концевому звену руки манипулятора, установка МЛЭ соединена с указанной крышкой с внутренней ее стороны, при этом КА снабжен устройством стыковки крышки выходного люка со шлюзовой камерой, включающим в себя установленные на корпусе камеры захваты, направляющие, стяжки и толкатели, а также установленные на отделяемой крышке ответные части направляющих.
Установка МЛЭ может быть соединена с крышкой выходного люка шлюзовой камеры посредством адаптера, связанного разъемным соединением с данной крышкой.
На поверхности МЗЭ могут быть закреплены тепловые трубы и панели системы терморегулирования, обеспечивающие отвод тепла от установки МЛЭ.
На этой же поверхности со стороны установки МЛЭ могут быть установлены датчики параметров атмосферы за экраном.
МЗЭ может быть выполнен в форме диска, к которому по периферии прикреплена тонкая кольцевая оболочка, снабженная управляемым устройством для ее раскрытия и складывания.
Решение указанной задачи и достижение указанного технического результата обеспечиваются также тем, что в предлагаемом способе, в отличие от известного [2], крышку выходного люка шлюзовой камеры отделяют посредством указанных толкателей и при помощи указанного манипулятора выводят из камеры скрепленные с этой крышкой МЗЭ и установку МЛЭ, удаляя их в полусферическое пространство хвостовой части КА, а при возврате установки МЛЭ в шлюзовую камеру с помощью указанного устройства стыковки корректируют угловые и линейные погрешности совмещения манипулятором осей крышки выходного люка и шлюзовой камеры, осуществляют перехват указанной крышки у манипулятора и ее осевое перемещение до завершения стыковки с камерой при обеспечении необходимых усилий герметизации стыка.
В предпочтительном варианте перед включением аппаратуры установки МЛЭ ориентируют экран в положение, обеспечивающее максимальную освещенность аппаратуры установки МЛЭ и экрана для их дегазации. Предпочтительно также, чтобы перед включением аппаратуры установки МЛЭ при помощи манипулятора осуществлялось перемещение экрана в заданные точки космического пространства, в которых проводились бы измерения параметров атмосферы за экраном, а затем расчетным путем определялась оптимальная точка для проведения исследований в области следа за экраном и манипулятор перемещал экран в эту точку.
Предлагаемый КА в данном примере выполнен в виде обслуживаемого модуля известного многофункционального КА [2] (фиг.3).
Предлагаемый КА (фиг.4) содержит герметичный 1 и негерметичный 2 отсеки для размещения научной и служебной аппаратуры, центральную шлюзовую камеру 3, имеющую входной герметичный люк 4 для доступа в шлюзовую камеру из герметичного отсека и выходной герметичный люк 5 с отделяемой крышкой люка 6 (фиг.5).
КА снабжен устройством 7 (фиг.6б) стыковки крышки выходного люка 5 со шлюзовой камерой 3, обеспечивающим отделение крышки и последующее герметичное закрытие выходного люка крышкой.
На негерметичном отсеке 2 установлен манипулятор 8 (фиг.4). Внутри шлюзовой камеры размещается (в транспортном положении) установка МЛЭ 9. МЗЭ 10 (фиг.5) прикреплен к крышке 6 выходного люка. На поверхности крышки 6 со стороны шлюзовой камеры имеются приливы для крепления адаптера 11. В крышке 6 имеется герметичный электроразъем 12 для подвода электропитания снаружи модуля.
Для перемещения сборки «установка МЛЭ 9 - крышка 6 - МЗЭ 10» на экране имеется кронштейн 14, к которому крепится конечное звено 15 манипулятора 8.
Особенностью предлагаемой конструкции является полное отсоединение крышки 6 от выходного люка 5 шлюзовой камеры 3 и герметизация шлюзовой камеры этой крышкой снаружи. При этом давление атмосферы в шлюзовой камере отжимает крышку 6 после ее крепления от шпангоута 16 люка 5. Поэтому для обеспечения необходимых усилий по герметизации стыка в составе устройства 7 стыковки предусмотрены захваты 17 (фиг.6б), притягивающие шпангоут крышки 18 к шпангоуту 16, имеющего герметизирующий элемент.
Звенья манипулятора имеют технологические зазоры в местах их соединения, поэтому перемещаемая манипулятором полезная нагрузка имеет свободный ход линейного и углового положения. Это определяет дополнительные сложности при помещении технологической установки в шлюзовую камеру после завершения экспериментов, стыковки и герметизации крышки и шлюзовой камеры. Для преодоления этих сложностей устройство стыковки 7 имеет направляющие 19 типа «конус-цилиндр», датчики контакта 20 и стягивающее устройство 21. На шпангоуте крышки 6 имеются ответные части 22 типа «конус-цилиндр», обеспечивающие начальный контакт с направляющими 19 и центрирование сборки до касания элементами 22 трех датчиков контакта 20 стыковочного устройства 7 (фиг.6а, 6б).
После поджатия пружин датчиков контакта манипулятором и фиксации касания тремя датчиками производится захват шпангоута крышки люка захватами 17, перевод работы манипулятора в режим свободного перемещения его звеньев, стягивание стыка со шлюзовой камерой стягивающим устройством 21 (фиг.6б).
Для начального отжатия крышки 6 при расстыковке вышеуказанной сборки и шлюзовой камеры 3 устройство стыковки 7 снабжено толкателями 23, создающими усилие при отстыковке крышки люка и перемещающимися свободно при операциях по стыковке сборки со шлюзовой камерой.
МЗЭ 10 может выполняться в вариантах жесткого диска, например полированного стального диска (фиг.5, 6), и жесткого диска с закрепленной по краю диска складывающейся оболочкой, например стальной фольгой, в форме кругового кольца.
Второй вариант МЗЭ в транспортном и рабочем положениях показан на фиг.4, 7а, 7б. МЗЭ состоит из жесткого диска 24, на котором по торцу закреплена складывающаяся оболочка 25 (фиг.7а, 7б). К оболочке прикреплены ребра жесткости 27, например металлические упругие спицы, которые могут вращаться и устанавливаться в рабочем положении по радиусу диска. При этом обеспечивается натяжение складывающейся оболочки по форме кругового кольца. Для вращения ребер жесткости к диску крепится электромеханический привод 26, который обеспечивает многократное раскладывание и складывание оболочки.
Работа предлагаемого КА при осуществлении им предлагаемого способа происходит следующим образом.
КА собирается и оснащается научной и технологической аппаратурой в наземных условиях и выводится в составе космического комплекса (многофункционального КА, фиг.3) на рабочую орбиту. Манипулятор может монтироваться на Земле и выводиться вместе с КА, либо доставляться на пилотируемую станцию, с которой обслуживается КА, и монтироваться космонавтами при нахождении модуля в составе станции.
Приведение установки МЛЭ в рабочее состояние осуществляется в следующей последовательности (фиг.8).
Этап 1. Производятся подготовительные операции для выдвижения установки МЛЭ из шлюзовой камеры 3. Закрывается входной люк 4. Осуществляется сброс давления из шлюзовой камеры. Подается команда на раскрытие захватов 17.
Этап 2. Толкателями 23 осуществляется отделение вышеуказанной сборки (установки, экрана и крышки) от шлюзовой камеры. Величина зазора между шпангоутами шлюзовой камеры и крышки выходного люка (рабочий ход толкателей) определяется силовыми возможностями манипулятора по дальнейшему перемещению сборки.
Этап 3. Далее манипулятором 8 осуществляется осевое выдвижение сборки до полного выхода установки МЛЭ 9 из шлюзовой камеры на расстояние, при котором возможно осуществление безударного вращения сборки и раскрытия складывающейся части защитного экрана.
Этап 4. Сборка разворачивается манипулятором в положение, при котором установка 9 защищается от набегающего атмосферного потока экраном 10 с реализацией возможности ее размещения в зоне сверхвысокого вакуума (фиг.1, 2).
Этап 5. Включается электромеханический привод 26 и развертывает оболочку 25 экрана. Перед включением аппаратуры установки МЛЭ экран 10 может быть ориентирован в положение, обеспечивающее максимальную освещенность аппаратуры установки 9 и экрана 10 Солнцем и/или Землей для их дегазации.
Этапы 6-9. Манипулятор 8 раскладывается на рабочую длину и осуществляет по заложенной программе последовательное перемещение сборки в хвостовой полусфере КА с поиском положения, в котором за экраном 10 в технологической зоне МЛЭ создается минимальное давление (наиболее высокий вакуум).
В данном положении включается аппаратура установки МЛЭ и проводится заданная программа экспериментов в среде сверхвысокого космического вакуума.
После завершения программы работ на установке МЛЭ и остывания установки до допустимой температуры осуществляется перенос установки в шлюзовую камеру в обратном порядке и заполнение шлюзовой камеры атмосферой КА. На конечном участке стягивания шпангоутов крышки люка и шлюзовой камеры стягивающим устройством 21 толкатели 23 перемещаются без усилий.
Для осуществления предлагаемых изобретений имеются все необходимые средства, апробированные в ходе уже проведенных космических полетов.
Перечень фигур
Существо предлагаемого изобретения поясняется нижеследующим детальным описанием примера его выполнения с прилагаемыми чертежами.
Фиг.1. Схема конусного следа за молекулярным экраном.
Фиг.2. Компоновочная схема модуля WSF (слева) и идеализированная схема формирования зоны сверхвысокого вакуума за экраном.
Фиг.3. Общий вид многофункционального обслуживаемого КА (прототипа).
Фиг.4. КА согласно изобретению, выполненный в виде обслуживаемого модуля орбитального аппарата.
Фиг.5. Компоновка основных элементов оборудования для МЛЭ на крышке выходного люка шлюзовой камеры.
Фиг.6. Заключительные операции по перемещению установки МЛЭ внутрь шлюзовой камеры и стыковки крышки выходного люка.
Фиг.6а. Перемещение сборки манипулятором в шлюзовую камеру.
Фиг.6б. Стягивание стыка «крышка-шпангоут люка шлюзовой камеры»
Фиг.7. Вариант молекулярного защитного экрана с жестким металлическим центральным диском и складывающейся оболочкой.
Фиг.7а. Экран в транспортном положении.
Фиг.7б. Экран с развернутой оболочкой при проведении экспериментов.
Фиг.8. Последовательность операций при подготовке оборудования МЛЭ на КА согласно изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАДУВНОЙ АВТОНОМНЫЙ КОСМИЧЕСКИЙ МОДУЛЬ | 2003 |
|
RU2241644C1 |
| БЛОК ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2726302C1 |
| СПОСОБ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ОТСЕКА КОСМИЧЕСКОГО АППАРАТА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ИСПЫТАНИЯ УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ОТСЕКА КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2176074C2 |
| КОСМИЧЕСКИЙ АППАРАТ | 2004 |
|
RU2271965C2 |
| МЕЖПЛАНЕТНЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ | 2016 |
|
RU2636453C2 |
| СТЕНД ДЛЯ ТЕПЛОВЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2553411C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ ТЕЧИ ИЗ ОТСЕКА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160438C2 |
| Способ стыковки космических аппаратов к вращающемуся космическому кораблю и устройство для его реализации | 2020 |
|
RU2788620C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2584042C2 |
Изобретения относятся к средствам и методам проведения на низкой околоземной орбите, преимущественно, длительных экспериментов в области производства материалов в условиях сверхглубокого вакуума. Космический аппарат (КА) содержит герметичный отсек и шлюзовую камеру с входным и выходным люками, манипулятор, установку молекулярно-лучевой эпитаксии (МЛЭ) и молекулярный защитный экран. Крышка выходного люка шлюзовой камеры выполнена отделяемой, защитный экран жестко прикреплен к этой крышке с внешней ее стороны и снабжен узлом крепления к концевому звену руки манипулятора. Установка МЛЭ соединена с указанной крышкой с внутренней ее стороны. КА снабжен устройством стыковки крышки выходного люка со шлюзовой камерой. Способ согласно изобретению включает выведение установки МЛЭ вместе с экраном из шлюзовой камеры, их удаление манипулятором от КА, ориентацию экрана в положение защиты установки МЛЭ от внешнего потока среды. После этого проводят исследования в области следа за экраном и возвращают установку МЛЭ в шлюзовую камеру. На этом этапе установка МЛЭ и экран закреплены на указанной крышке. При возврате установки МЛЭ в шлюзовую камеру с помощью указанного устройства стыковки корректируют угловые и линейные погрешности совмещения манипулятором осей крышки выходного люка и шлюзовой камеры. Осуществляют перехват указанной крышки у манипулятора и ее осевое перемещение до завершения стыковки с камерой при обеспечении необходимых усилий герметизации стыка. Перед началом экспериментов в следе за экраном последний может быть ориентирован так, чтобы обеспечить максимальную освещенность аппаратуры установки МЛЭ и экрана для их дегазации. Техническим результатом изобретений является повышение информативности и качества проводимых исследований по МЛЭ, а также уменьшение затрат на их проведение. 2 н. и 6 з.п. ф-лы, 8 ил.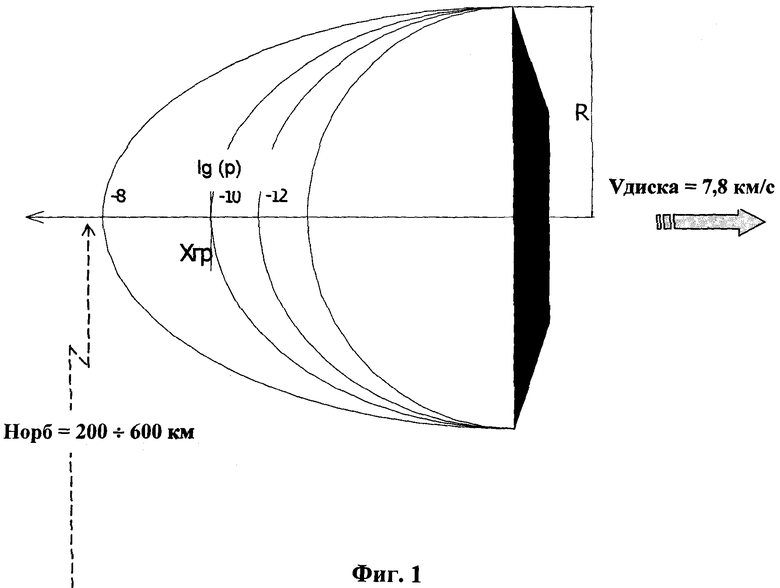
1. Космический аппарат, содержащий последовательно расположенные герметичный отсек и шлюзовую камеру, имеющую входной люк для доступа в нее из герметичного отсека и выходной люк для доступа в открытый космос, манипулятор, установленный снаружи космического аппарата, установку молекулярно-лучевой эпитаксии (МЛЭ) с технологической и научной аппаратурой, размещенную в транспортном положении в шлюзовой камере, и молекулярный защитный экран, отличающийся тем, что крышка выходного люка шлюзовой камеры выполнена отделяемой, молекулярный защитный экран жестко прикреплен к указанной крышке с внешней ее стороны и снабжен узлом крепления к концевому звену руки манипулятора, установка МЛЭ соединена с указанной крышкой с внутренней ее стороны, при этом космический аппарат снабжен устройством стыковки крышки выходного люка со шлюзовой камерой, включающим в себя установленные на корпусе камеры захваты, направляющие, стяжки и толкатели, а также установленные на отделяемой крышке ответные части направляющих.
2. Космический аппарат по п.1, отличающийся тем, что установка МЛЭ соединена с крышкой выходного люка шлюзовой камеры посредством адаптера, связанного разъемным соединением с данной крышкой.
3. Космический аппарат по п.1 или 2, отличающийся тем, что на поверхности молекулярного защитного экрана закреплены тепловые трубы и панели системы терморегулирования, обеспечивающие отвод тепла от установки МЛЭ.
4. Космический аппарат по п.1 или 2, отличающийся тем, что на поверхности молекулярного защитного экрана со стороны установки МЛЭ установлены датчики параметров атмосферы за экраном.
5. Космический аппарат по п.1 или 2, отличающийся тем, что молекулярный защитный экран выполнен в форме диска, к которому по периферии прикреплена тонкая кольцевая оболочка, снабженная управляемым устройством для ее раскрытия и складывания.
6. Способ проведения исследований в сверхглубоком космическом вакууме за молекулярным защитным экраном с помощью космического аппарата по любому из пп.1-5, включающий выведение в открытый космос из шлюзовой камеры указанной установки МЛЭ вместе с молекулярным защитным экраном, их удаление от космического аппарата, ориентацию экрана в положение защиты установки МЛЭ от внешнего потока среды, включение аппаратуры установки МЛЭ для проведения исследований в области следа за экраном и возврат установки МЛЭ в шлюзовую камеру по завершении данных исследований, отличающийся тем, что посредством указанных толкателей отделяют крышку выходного люка шлюзовой камеры и при помощи указанного манипулятора выводят из камеры скрепленные с этой крышкой молекулярный защитный экран и установку МЛЭ, удаляя их в полусферическое пространство хвостовой части космического аппарата, а при возврате установки МЛЭ в шлюзовую камеру с помощью указанного устройства стыковки корректируют угловые и линейные погрешности совмещения манипулятором осей крышки выходного люка и шлюзовой камеры, осуществляют перехват указанной крышки у манипулятора и ее осевое перемещение до завершения стыковки с камерой при обеспечении необходимых усилий герметизации стыка.
7. Способ по п.6, отличающийся тем, что перед включением аппаратуры установки МЛЭ ориентируют экран в положение, обеспечивающее максимальную освещенность аппаратуры установки МЛЭ и экрана для их дегазации.
8. Способ по п.6, отличающийся тем, что перед включением аппаратуры установки МЛЭ при помощи манипулятора перемещают экран в заданные точки космического пространства, в которых проводят измерения параметров атмосферы за экраном, а затем определяют расчетным путем оптимальную точку для проведения исследований в области следа за экраном и перемещают экран в эту точку.
| RU 2181094 С1, 10.04.2002 | |||
| КОСМИЧЕСКИЙ АППАРАТ | 1992 |
|
RU2072951C1 |
| US 4723734 A, 09.02.1988 | |||
| Russian Space Bull, 1996, v.3, №4, p.13-15 | |||
| Итоги науки и техники | |||
| Ракетостроение и космическая техника, т.10 | |||
| - M., 1989, с.76-78. | |||

