Изобретение относится к космической технике и предназначено для обеспечения автоматической стыковки космических аппаратов (кораблей и модулей).
Известны стыковочные устройства для космических аппаратов типа «штырь-конус». Для стыковки аппаратов на одном из них устанавливается агрегат стыковочный активный с крышкой люка, на которой закреплен штырь - стыковочный механизм с головкой захвата, датчики касания, подпружиненными защелками и электроприводами штанги и защелок. На другом аппарате устанавливается агрегат стыковочный пассивный с крышкой люка, на которой закреплен приемный конус с гнездом в донной части, оснащенный подвижными упорами с электроприводом. Сигнальные цепи и цепи управления приводами стыковочного механизма и упорами гнезда выведены на разъем крышек люков. Для изменения стыковочного агрегата активного в пассивный и наоборот предусматривалось введение в агрегат активный с крышкой люка «штырь» - крышки с «конусом» и наоборот (B.C. Сыромятников «100 рассказов о стыковке», ч.1, изд. Москва, Логос, 2003 г.). Предложенное решение приводит к значительному увеличению веса агрегатов, необходимости дополнительного объема для размещения второй крышки, затрат времени на замену люков и необходимости дополнительного контроля его герметичности.
Наиболее близким из аналогов (прототипом) является стыковочное устройство для космических аппаратов типа «штырь-конус», обладающее андрогинностью, патент RU №2006139369 А. В предлагаемом патенте андрогинность обеспечивается введением в конструкцию агрегата стыковочного пассивного с гнездом, в приемную воронку, дополнительной оболочки реверсивного действия, обеспечивающей выполнение стыковки с агрегатом со штырем или с конусом. Конструкция агрегата с реверсивной оболочкой не имеет достаточную жесткость для установки на ней датчиков касания и не обеспечивает возможность передачи с них сигнализации для автоматизации процесса стыковки. Кроме того, материал оболочки должен быть устойчив к длительному воздействию космической среды (большому диапазону изменения температур, космическому излучению и др. факторов), что в настоящее время нереализуемо.
Задачей предлагаемого стыковочного устройства для космических аппаратов является обеспечение андрогинности устройства за счет трансформации стыковочного устройства активного в стыковочное устройство пассивное.
Технический результат достигается за счет того, что в стыковочном устройстве для космических аппаратов, содержащем стыковочный агрегат со шпангоутом, закрепленным на корпусе космического аппарата, и крышку люка, на внешней стороне которой закреплен приемный конус, заканчивающийся гнездом в форме стакана с продольными прорезями, в которых установлены подвижные упоры, имеющие электропривод упоров, электрические цепи которого выведены на разъем крышки люка, в отличие от известного, на дне гнезда установлен разъем «розетка» и стыковочный механизм, опирающийся на конус и заканчивающийся хвостовиком с разъемом «вилка» и пружинными толкателями, опертыми на дно гнезда, фиксаторами хвостовика, закрытыми подвижными упорами гнезда, при этом разъемы «розетка-вилка» состыкованы, а на внешней стороне стыковочного механизма установлена штанга с головкой захвата, содержащая дачники касания, подпружиненные защелки, электропривод которых и электропривод штанги установлены внутри корпуса стыковочного механизма, а цепи управления электроприводами и сигнальные цепи датчиков касания выведены через состыкованные разъемы на разъем крышки люка.
Таким образом, обеспечивается одновременная установка приемного конуса и стыковочного механизма на одной крышке люка, а также возможность управления приводом упоров гнезда, приводами стыковочного механизмом и контроля датчиков касания головки захвата.
Предлагается стыковочное устройство типа «штырь-конус» для космических аппаратов, обеспечивающее андрогинность устройства за счет трансформации стыковочного устройства активного в стыковочное устройство пассивное съемом стыковочного механизма из конуса, установленного на крышке люка. Данная конструкция обеспечивает возможность использования одного стыковочного устройства в качестве активного или пассивного и многоразовую стыковку с различными кооперируемыми аппаратами в зависимости от поставленной задачи.
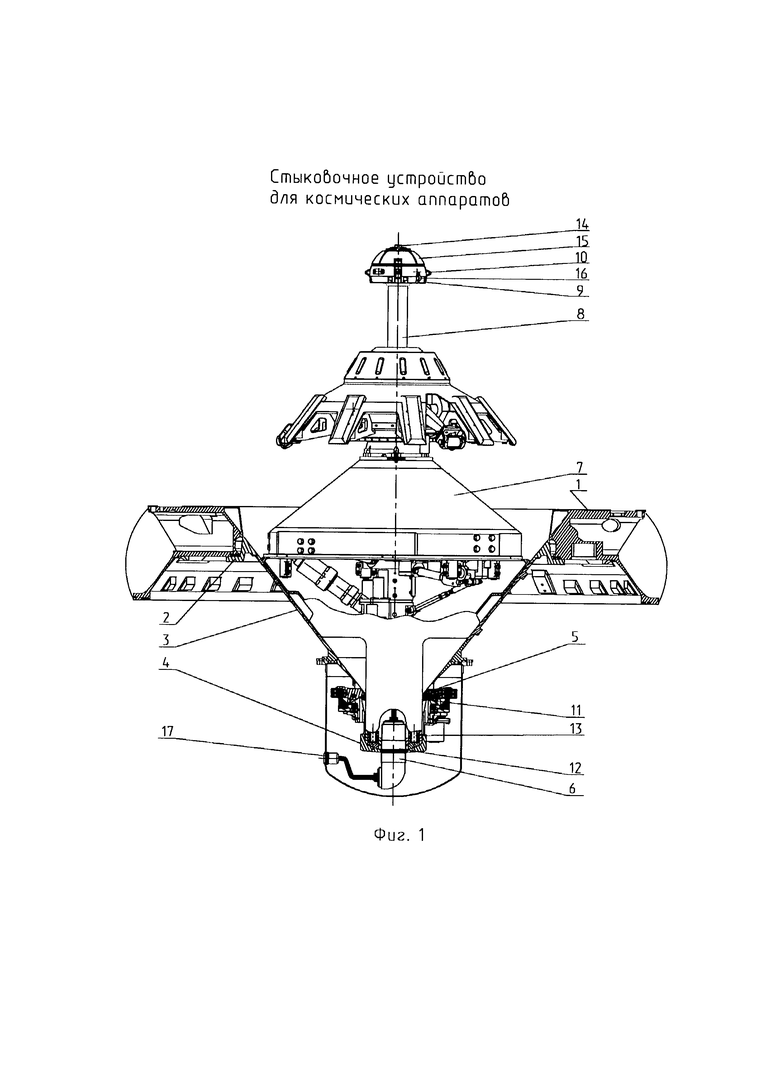
Конструкция предлагаемого стыковочного устройства для космических аппаратов приведена на фиг. 1.
В состав стыковочного устройства входят:
основной корпус 1;
с крышкой люка 2;
на которой установлен конус 3 с гнездом 4, имеющим продольные пазы, в которых установлены подвижные упоры 5 с электроприводом упоров и разъемом «розетка» 6 на дне гнезда, а на конус опирается корпус стыковочного механизма 7.
В состав стыковочного механизма входят:
- штанга 8 с головкой захвата 9;
- электроприводы штанги 8 и защелок 10 головки захвата;
- хвостовик с фиксаторами 11 и разъемом «вилка» 12;
- пружинные толкатели 13.
На головке захвата 9 установлены датчики касания 14, 15, 16, подпружиненные управляемые электроприводом защелки 10, положение которых соответствует пазам в гнезде конуса, устанавливаемого на аппарате, к которому выполняется стыковка.
Электрические цепи датчиков и электроприводов стыковочного механизма выведены через состыкованные разъемы на разъем крышки люка.
Этим обеспечивается возможность передачи сигнализации с датчиков касания головки захвата и управление электроприводами стыковочного механизма через разъем на крышке люка.
Датчики касания 14, 15, 16 и подпружиненные защелки головки 10 обеспечивают формирование сигналов касания и захвата гнезда пассивного агрегата стыкуемого аппарата. Электропривод штанги обеспечивает осевое продольное перемещение штанги стыковочного механизма после захода защелок головки захвата в гнездо конуса пассивного агрегата за счет работы блока автоматики управления, подключаемого к разъему крышки люка.
Операция по съему стыковочного механизма выполняется за счет втягивания подвижных упоров гнезда при включении электропривода упоров и тем самым освобождения фиксаторов хвостовика и работы пружинных толкателей, поджатых при установке стыковочного механизма. Это позволяет трансформировать агрегат стыковочный активный в агрегат стыковочный пассивный без применения дополнительных средств.
Операция по установке стыковочного механизма выполняется при втянутом положении подвижных упоров гнезда с поджатием пружинных толкателей хвостовика стыковочного механизма, введенного в гнездо, стыковки разъемов «вилка» хвостовика и «розетка» гнезда и последующего включения электропривода подвижных упоров гнезда на поджатие упоров хвостовика стыковочного механизма. Этим обеспечивается жесткое закрепление и привязка стыковочного механизма к осям стыковочного устройства.
Предлагаемая конструкция стыковочного устройства обеспечивает:
- возможность использования одного стыковочного устройства в качестве «активного» со штырем или «пассивного» с гнездом;
- без использования спецсредств выполнение демонтажа/установки стыковочного механизма;
- во время автономного полета аппарата, оснащенного устройством стыковочным, и возникновения нештатной ситуации, возможность использования аналогичного аппарата с устройством стыковочным активным «спасателем» для аппарата с нештатной ситуацией после «отстрела» стыковочного механизма за счет пружинных толкателей и трансформации его в пассивный;
- при многократном использовании стыковочного механизма и необходимости его снятии перед спуском аппарата на Землю в гнезде конуса, возможно, обеспечить установку различной полезной нагрузки или научной аппаратуры для проведения научных экспериментов, управление которыми обеспечивается через разъем крышки люка.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНДРОГИННОЕ СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ КОРАБЛЕЙ | 2005 |
|
RU2291821C1 |
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| Андрогинный стыковочный агрегат для космических аппаратов на базе открытой модульной архитектуры | 2022 |
|
RU2802572C1 |
| АГРЕГАТ СТЫКОВОЧНЫЙ ПАССИВНЫЙ | 2007 |
|
RU2349517C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2662605C2 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| Способ стыковки космических аппаратов к вращающемуся космическому кораблю и устройство для его реализации | 2020 |
|
RU2788620C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| ПАССИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583992C2 |
| Стыковочный агрегат летательного аппарата | 1990 |
|
SU1744003A1 |
Изобретение относится к космической технике и предназначено для обеспечения автоматической стыковки космических аппаратов. Стыковочное устройство для космических аппаратов содержит стыковочный агрегат со шпангоутом, закрепленным на корпусе космического аппарата, и крышку люка, на внешней стороне которой закреплен приемный конус, заканчивающийся гнездом в форме стакана с продольными прорезями. На дне гнезда установлен разъем «розетка» и стыковочный механизм, опирающийся на конус и заканчивающийся хвостовиком с разъемом «вилка» и пружинными толкателями. Разъемы «розетка-вилка» состыкованы. На внешней стороне стыковочного механизма установлена штанга с головкой захвата. Штанга содержит датчики касания, подпружиненные защелки, электропривод которых и электропривод штанги установлены внутри корпуса стыковочного механизма. Цепи управления электроприводами и сигнальные цепи датчиков касания выведены через состыкованные разъемы на разъем крышки люка. Техническим результатом изобретения является обеспечение андрогинности устройства за счет трансформации стыковочного устройства активного в стыковочное устройство пассивное. 1 ил.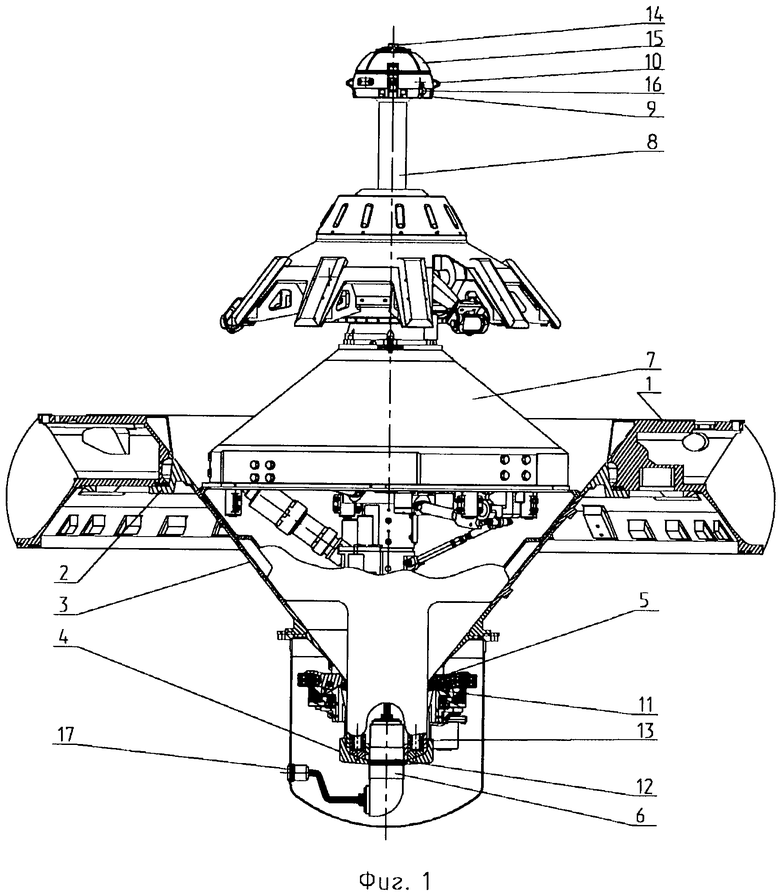
Стыковочное устройство для космических аппаратов, содержащее стыковочный агрегат со шпангоутом, закрепленным на корпусе космического аппарата, крышку люка, на внешней стороне которой закреплен приемный конус, заканчивающийся гнездом в форме стакана с продольными прорезями, в которых установлены подвижные упоры, имеющие электропривод упоров, электрические цепи которого выведены на разъем крышки люка, отличающееся тем, что на дне гнезда установлен разъем «розетка» и стыковочный механизм, опирающийся на конус и заканчивающийся хвостовиком с разъемом «вилка» и пружинными толкателями, опертыми на дно гнезда, фиксаторами хвостовика, закрытыми подвижными упорами гнезда, при этом разъемы «розетка-вилка» состыкованы, а с внешней стороны стыковочного механизма установлена штанга с головкой захвата, содержащая датчики касания, подпружиненные защелки, электропривод которых и электропривод штанги установлены внутри корпуса стыковочного механизма, а цепи управления электроприводами и сигнальные цепи датчиков касания выведены через состыкованные разъемы на разъем крышки люка.
| Сыромятников В.С | |||
| Стыковочные устройства космических аппаратов | |||
| - М., 1984, стр | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| US 5364046 A, 15.11.1994 | |||
| JPH03164399 A, 16.07.1991. | |||

