Изобретение относится к космической технике и может быть использовано для стыковки космических аппаратов (КА) с вращающимся космическим кораблем или космической станцией.
Известны и широко отработаны способы стыковки КА на орбите и устройства для их осуществления, например система «Игла», андрогинные системы «Курс», «Курс-ММ». При всех этих способах стыковка осуществляется после совмещения плоскости орбит стыкуемых аппаратов и выравнивания их относительных скоростей. Завершающим этапом является мягкая стыковка, касание, захват с фиксацией узлами стыковки и последующим стягиванием КА. Например, решение, защищенное патентом Российской Федерации «Андрогинный периферийный агрегат стыковки (АПАС) и демпфер амортизационно-приводной системы для него» №2131829, B64G 1/00, 23.02.1998, Сыромятников B.C. Акционерное общество открытого типа Ракетно-космическая корпорация "Энергия" имени С.П. Королева.
Недостатком известного способа являются требования высокой точности выполнения на всех этапах стыковки, т.к. в противном случае есть высокий уровень риска аварийной ситуации.
Известно техническое решение по патенту RU 2601522 C1 B64G 1/64 B25J 1/08 от 10.11.2016 «Космический аппарат обслуживания на орбите автоматического космического аппарата и способ стыковки космического аппарата обслуживания с неисправным вращающимся космическим аппаратом».
Решение заключается в следующем. Способ стыковки космического аппарата обслуживания (КАО) с неисправным вращающимся космическим аппаратом (КА), включающий их сближение, совмещение продольных осей, стыковку с использованием штатных узлов стыковки КА и КАО и двигательной установки КАО, отличающийся тем, что после сближения и совмещения продольной оси КАО с осью вращения КА закручивают поворотную платформу с манипулятором захвата КА до угловой скорости, по величине и направлению совпадающей со скоростью вращения КА, производят захват КА манипулятором для захвата КА, прекращают относительное вращение КА и КАО с помощью тормозного устройства поворотной платформы и двигательной установки КАО, прекращают захват КА, перемещают КАО до сближения и стыковки с использованием штатного узла стыковки.
Недостатками данного способа стыковки КАО с вращающимся обслуживаемым КА являются: невозможность стыковки к более крупному вращающемуся КА; необходимость торможения вращающегося КА; активный КА должен быть крупнее и совершать ряд энерго-затратных маневров.
Задачей является обеспечение многоразовых стыковок к постоянно вращающемуся крупному КА другими (более мелкими) обслуживающими КА-челноками.
Целью предлагаемого решения является создание метода многократных стыковок к вращающемуся КА без влияния на его нормальную работу, который остается пассивным при выполнении стыковок.
Достижение цели при реализации предлагаемого способа обеспечивает стыковка к внешнему контуру КА. Данный метод стыковки разработан для пилотируемого КА (ПКА) в форме тора, непрерывно вращающегося для имитации гравитации.
Сущность изобретения заключается в следующем.
Способ стыковки специализированных космических аппаратов -челноков к крупному пилотируемому космическому аппарату (ПКА) в форме тора заключается в том, что челнок во время сближения стабилизируется по скорости и направлению по касательной к внешнему контуру тора в сторону его вращения, вследствие чего у челнока оказываются почти нулевые горизонтальную и вертикальную скорости относительно поверхности тора в точке касания, с челнока выдвигаются стыковочные штанги (СШЧ), оборудованные роликами для захвата поверхностей силовых транспортных рельс (СТР), установленных на поверхности тора, с обеих сторон, затем происходит перестыковка челнока со стыковочных штанг на стыковочные замки, которые жестко фиксируют его положение на торе. Далее, для отстыковки челнока, достаточно просто разомкнуть замки и центробежная сила оттянет челнок от тора.
Устройство для реализации способа стыковки КА-челнока к непрерывно вращающемуся ПКА, выполнено таким образом, что ПКА оснащен силовыми транспортными рельсами по всему внешнему контуру тора, интегрированные в силовое внешнее кольцо тора, разнесенными по всей длине СТР посадочными излучателями, по которым ориентируется челнок, оснащенный навигационными датчиками, двигателями коррекции, основной двигательной установкой, стыковочными штангами, оборудованные роликами для захвата поверхностей СТР и перемещению по ним, стыковочными замками, жестко фиксирующие положение челнока на торе.
Сущность способа и устройства для его реализации иллюстрируют схемы:
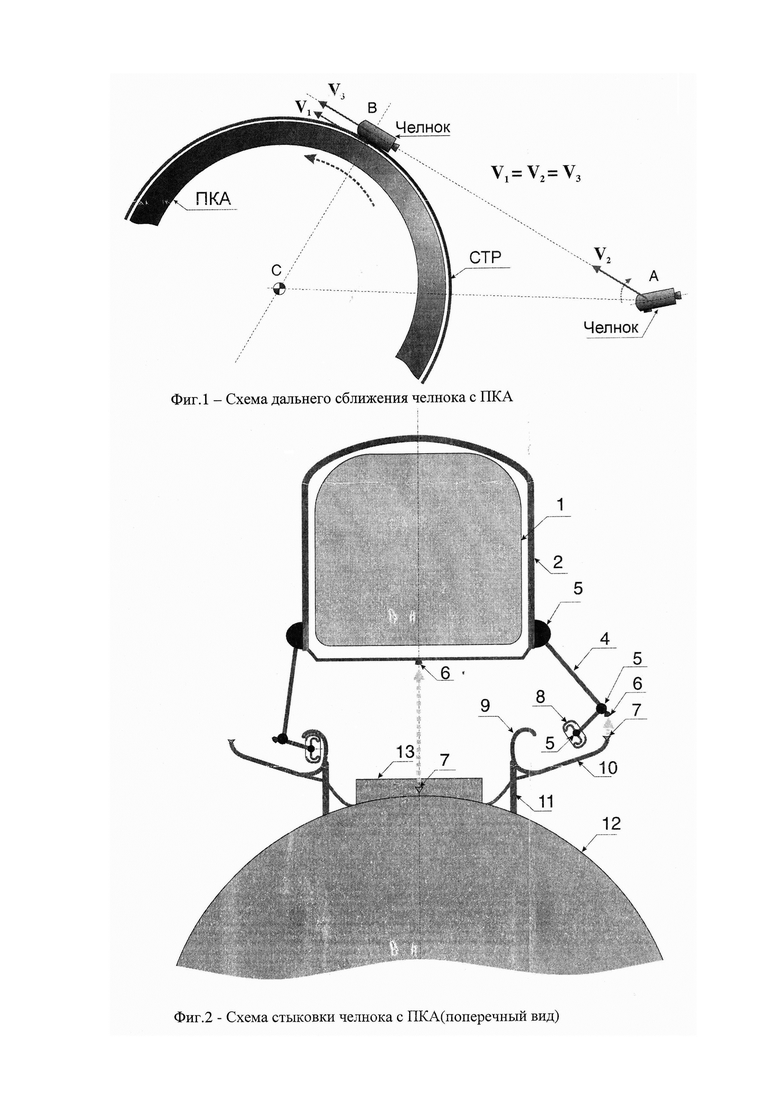
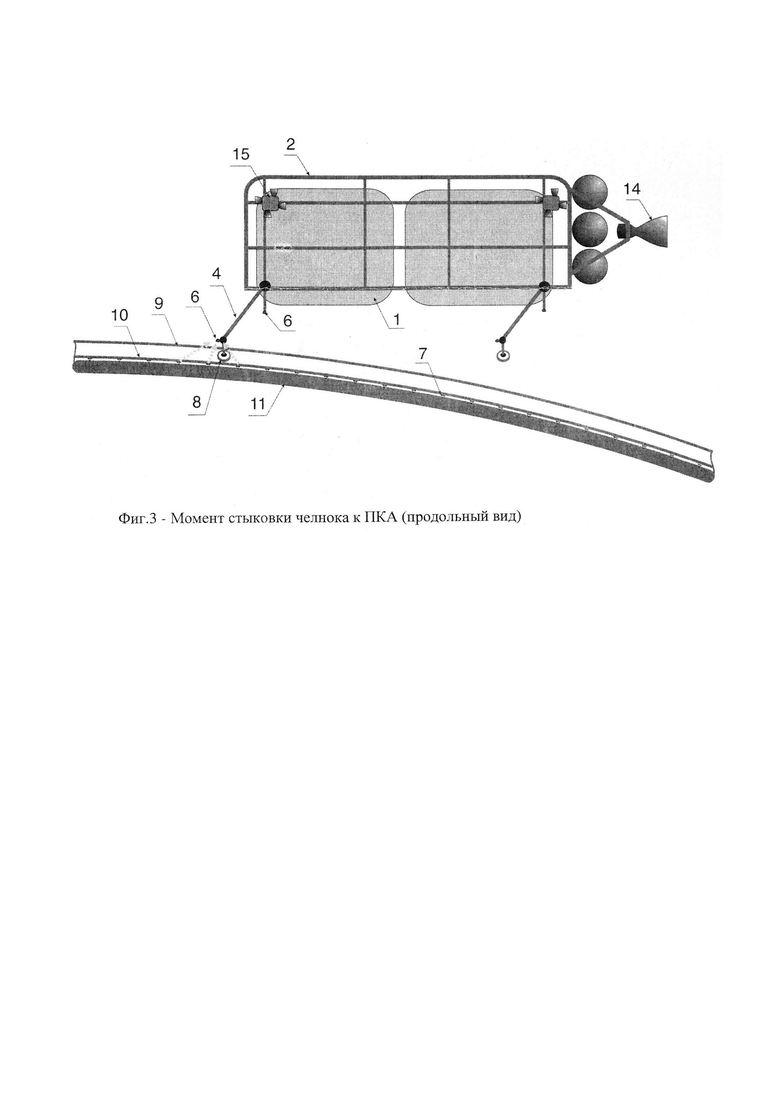
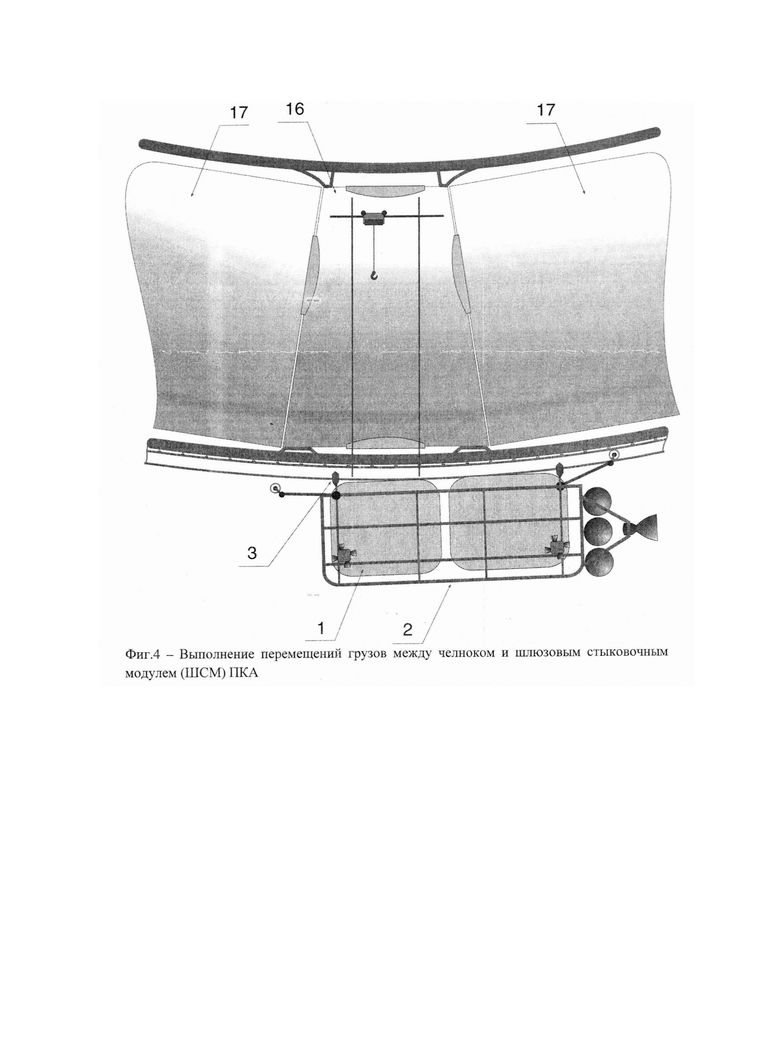
фиг. 1 - схема дальнего сближения челнока с ПКА; фиг. 2 - схема стыковки челнока с ПКА (поперечный вид); фиг. 3 - момент стыковки челнока к ПКА (продольный вид); фиг. 4 - выполнение перемещений грузов между челноком и шлюзовым стыковочным модулем (ШСМ) ПКА.
Приняты обозначения:
1 - упаковки транспортируемых на челнок грузов;
2 - рамная конструкция грузового отсека челнока;
3 - стыковочные замки челнока;
4 - стыковочные штанги челнока (СШЧ) с управляемым поворотом в двух плоскостях;
5 - сервоприводы (на электродвигателях) для поворота - выставки в нужные положения элементов конструкции и вращением роликов СШЧ;
6 - навигационные датчики челнока;
7 - посадочные излучатели СТР ПКА;
8 - ролики стыковочного узла;
9 - рельсы стыковочной системы ПКА;
10 - посадочная площадка;
11 - основа силового контура СТР;
12- корпус модуля ПКА;
13 - стыковочно-переходной люк шлюзового стыковочного модуля (ШСМ);
14 - главная двигательная установка челнока;
15 - корректирующая двигательная установка (КДУ);
16 - шлюзовой стыковочный модуль (ШСМ) ПКА;
17 - сегментные модули тора ПКА.
Благодаря равномерному вращению тора каждый участок СТР будет иметь одинаковую и постоянную линейную скорость по касательной к дуге СТР (V1 на фиг. 1).
Наведение с последующей стабилизацией челнока в исходной т. А осуществляется следующим образом:
а) «дорожка» из светящихся центральных посадочных излучателей [цПИ] (поз. 7, фиг. 2, на оси симметрии тора) принимается центральными навигационными датчиками [цНД] (поз. 6. фиг. 2, на оси симметрии челнока) и должна визироваться как отрезок прямой линии. Это достигается коррекцией положения челнока корректирующей двигательной установкой [КДУ] челнока (поз.15, фиг. 3);
б) затем КДУ производится разворот и прицеливание оси челнока на крайнюю «уходящую» точку этого «светящегося прямого отрезка» из цПИ;
в) затем включается основной двигатель (поз.14, фиг. 3), придающий челноку скорость V2 (фиг. 1) в сторону крайней точки дорожки цПИ;
г) при этом эта видимая крайняя точка дорожки цПИ будет точкой В (фиг. 1) «касания» линии АВ (траектории подлета челнока к ПКА), и векторы скорости подлета челнока к ПКА (V2=V3) будут равны линейной скорости СТР ПКА V1.
Этапы стыковки:
1) челнок стабилизируется по координатам, скорости полета и направлению в определенной позиции (т. А фиг. 1) относительно ПКА. Точка А исходной позиции находится в плоскости вращения ПКА, челнок разворачивается и стабилизируется в направлении по касательной к внешнему контуру тора в сторону его вращения;
2) затем ДУ челнока (поз. 14) придает ему импульс в установленном направлении со скоростью равной скорости движения внешнего контура ПКА;
3) это позволит подлететь челноку к ПКА так, что на минимальном расстоянии от него корпус челнока будет иметь почти нулевую (как продольную, так и поперечные) скорость относительно находящимися под ним элементами СТР (поз. 10);
4) в этот момент с челнока выдвигаются стыковочные штанги (поз. 4), оборудованные роликами (поз. 8) для «приземления» на посадочные поверхности (поз. 10) СТР с обеих сторон;
5) сервоприводы, манипулятора (поз. 5) должны достаточно быстро развернуть СШЧ (поз. 4) и ролики (поз. 8) для заезда внутрь СТР, обеспечив одновременно и «прилипание» челнока к СТР ПКА, и возможности перемещаться челноку вдоль этих СТР. Особенность конструкции СТР такова, что они обладают «замковым» эффектом: ролики легко заходят в них и могут катиться внутри рельсов, но выйти не могут;
6) по СТР пристыкованный челнок докатится до нужного шлюзового стыковочного модуля(ШСМ) (поз.13) ПКА, остановится над ним, подтянется к рельсам и жестко состыкуется стыковочными замками. Далее осуществляется прием-передача грузов между челноком и ШСМ (фиг. 4);
7) для отстыковки челнока нужно только раздвинуть ролики (поз. 8) из «замковых рельсов» (поз. 9) и разомкнуть стыковочные замки. Далее центробежная сила сама начнет отводить челнок от ПКА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многослойная гибкая надувная оболочка для космического аппарата | 2021 |
|
RU2781894C1 |
| КОСМИЧЕСКИЙ АППАРАТ ОБСЛУЖИВАНИЯ НА ОРБИТЕ АВТОМАТИЧЕСКОГО КОСМИЧЕСКОГО АППАРАТА И СПОСОБ СТЫКОВКИ КОСМИЧЕСКОГО АППАРАТА ОБСЛУЖИВАНИЯ С НЕИСПРАВНЫМ ВРАЩАЮЩИМСЯ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2601522C1 |
| ОБСЛУЖИВАЕМЫЙ НА ОРБИТЕ АВТОМАТИЧЕСКИЙ КОСМИЧЕСКИЙ АППАРАТ | 2015 |
|
RU2595352C1 |
| Способ управления сервисным космическим аппаратом при бесконтактном удалении фрагментов космического мусора | 2019 |
|
RU2720606C1 |
| Способ синхронизации угловой скорости вращения активного космического аппарата с пассивным космическим аппаратом при выполнении операции обслуживания | 2017 |
|
RU2750077C2 |
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2521082C2 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2019 |
|
RU2725010C1 |
| КОСМИЧЕСКИЙ АППАРАТ-ЭВАКУАТОР | 2018 |
|
RU2686563C1 |
| СПОСОБ СИНХРОНИЗАЦИИ УГЛОВЫХ СКОРОСТЕЙ ДВИЖЕНИЯ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА С ПАССИВНЫМ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2603301C1 |
| ПЛАНИРУЮЩИЙ КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) СО СТВОРЧАТЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВОЗВРАЩЕНИЕМ НА АЭРОДРОМ | 2011 |
|
RU2479469C1 |
Группа изобретений относится к космической технике, а более конкретно к системам стыковки космических аппаратов. Способ стыковки специализированных космических аппаратов-челноков к крупному пилотируемому космическому аппарату (ПКА) в форме тора заключается в том, что челнок перед стыковкой стабилизируется по скорости и направлению по касательной к внешнему контуру тора в сторону его вращения. После сближения с челнока выдвигаются стыковочные штанги (СШЧ), оборудованные роликами для захвата поверхностей силовых транспортных рельс (СТР). СРТ установлены на поверхности тора, с обеих сторон. Далее происходит перестыковка челнока со стыковочных штанг на стыковочные замки, установленные на СШЧ, которые жестко фиксируют его положение на торе. Достигается стыковка с вращающимся ПКА без изменения скорости вращения ПКА. 2 н.п. ф-лы, 4 ил.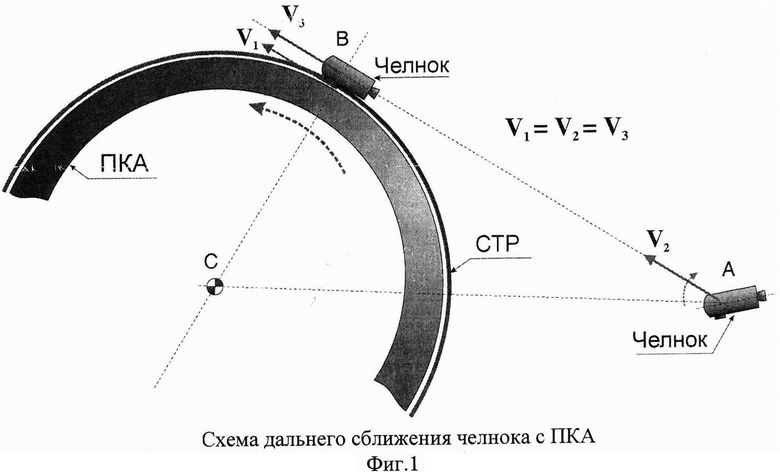
1. Способ стыковки специализированных космических аппаратов-челноков к крупному пилотируемому космическому аппарату (ПКА) в форме тора, заключающийся в том, что челнок во время сближения стабилизируется по скорости и направлению по касательной к внешнему контуру тора в сторону его вращения, установив почти нулевые горизонтальную и вертикальную скорости относительно поверхности тора в точке касания, с челнока выдвигаются стыковочные штанги (СШЧ), оборудованные роликами для захвата поверхностей силовых транспортных рельс (СТР), установленных на поверхности тора, с обеих сторон, после происходит перестыковка челнока со стыковочных штанг на стыковочные замки, которые жестко фиксируют его положение на торе, а для отстыковки челнока достаточно просто разомкнуть замки и центробежная сила будет оттягивать челнок от тора.
2. Устройство для реализации способа стыковки КА-челнока к непрерывно вращающемуся ПКА, выполненное таким образом, что ПКА оснащен силовыми транспортными рельсами по всему внешнему контуру тора, интегрированными в силовое внешнее кольцо тора, разнесенными по всей длине СТР посадочными излучателями, по которым ориентируется челнок, оснащенный навигационными датчиками, двигателями коррекции, основной двигательной установкой, стыковочными штангами, оборудованными роликами для захвата поверхностей СТР и перемещению по ним, стыковочными замками, жестко фиксирующими положение челнока на торе.
| US 6206328 B1, 27.03.2001 | |||
| CN 110481817 A, 22.11.2019 | |||
| СИСТЕМА И СПОСОБ ДОЗАПРАВКИ СПУТНИКОВ | 2008 |
|
RU2478534C2 |

