Изобретение относится к физике магнетизма, в частности к способам получения конфигурации магнитного поля в форме однонаправленно пульсирующего вихревого поля, создающего тянущее по окружности магнитное поле по отношению к движущемуся в нем ферромагнитному телу (эксцентрику).
Известно, что напряженность магнитного поля вдоль продольной оси магнита вдвое больше, чем в направлениях, ортогональных продольной магнитной оси. Распределение напряженности магнитного поля в пределах сферы, центр которой совпадает с точкой пересечения плоскости магнитных полюсов подковообразного магнита с продольной магнитной осью, задается диаграммой направленности, например, в виде тела вращения относительно продольной магнитной оси контуром кардиоиды, заданной выражением:

где α - угол отклонения радиус-вектора до произвольной точки на сфере от направления, совпадающего с продольной магнитной осью. Так, при α=0 имеем ξ(0)=1, при α=π/2 получаем ξ(π/2)=0,5, что отвечает известным физическим данным [1]. Для подковообразного магнита при α=π значение ξ(π)=0. Для прямого магнита диаграмма направленности представляется эллипсоидом вращения, большая полуось которого вдвое больше малой его полуоси и совпадает с продольной магнитной осью.
Известно, что вращательный момент, сообщаемый ротору синхронного или асинхронного двигателя переменного тока со стороны его статора, возникает вследствие вращающегося магнитного поля, вектор которого вращается относительно оси ротора в функции времени. При этом такое магнитное поле определяет динамический процесс его взаимодействия с ротором.
Неизвестны способы создания вихревого магнитного поля синтезом статических магнитных полей, создаваемых какой-либо совокупностью неподвижных постоянных магнитов. Поэтому неизвестны аналоги заявляемому техническому решению.
Целью изобретения является способ создания вихревого магнитного поля, в котором ферромагнитное тело испытывает действие однонаправленной пульсирующей силы, приводящей такое тело во вращательное движение, то есть получение такой статической конфигурации магнитного поля (от неподвижно расположенных постоянных магнитов), которая эквивалентна по эффекту действия вращающемуся магнитному полю.
Указанная цель достигается в заявляемом способе создания вихревого магнитного поля, состоящем в том, что несколько постоянных магнитов симметрично располагают относительно окружности, продольные магнитные оси постоянных магнитов совмещают с касательными к указанной окружности в точках, расположенных симметрично на этой окружности, а число n постоянных магнитов находят из условия 2π/n≤ΔΘ, где угол ΔΘ=arccos[1/(1+γ)], параметр γ=d/R, a d - расстояние от точек пересечения продольных магнитных осей постоянных магнитов с их плоскостями полюсов до указанной окружности радиуса R, силовую функцию постоянных магнитов D и параметр γ выбирают так, чтобы тормозящий момент, создаваемый предыдущим магнитом, частично или полностью компенсировался ускоряющим моментом последующего магнита по направлению вихревого магнитного поля, причем величина D=µ0µνS2Н0 2/8π2R5, где µ0=1,256.10-6 Гн/м - абсолютная магнитная проницаемость вакуума, µ - относительная магнитная проницаемость ферромагнитного тела объемом ν, которое взаимодействует с магнитным полем, напряженность которого равна Н0 в плоскости полюсов постоянных магнитов с поперечным сечением их полюсов S.
Достижение цели изобретения в заявляемом способе объясняется реализацией периодической структуры магнитных полей вокруг некоторой окружности с направлением продольных магнитных осей постоянных магнитов одного знака по касательным к этой окружности, в которой вихревое магнитное поле возникает благодаря различию напряженности магнитного поля вдоль и поперек продольных магнитных осей постоянных магнитов, определяемому диаграммой направленности напряженности ξ(α) магнитного поля согласно (1). Это обеспечивает превышение момента количества движения в направлении вихревого магнитного поля, сообщаемого ферромагнитному телу, над моментом количества движения в противоположном направлении.
Структура устройства, реализующего заявляемый способ, приведена на фиг.1. Возможные варианты движения ферромагнитного тела в магнитном поле одного из n постоянных магнитов представлены на фиг.2 для различных значений нагрузок и трения на оси вращения эксцентрика с ферромагнитным телом. На фиг.3 приведены графики действующих от n постоянных магнитов движущих ферромагнитное тело эксцентрика сил с учетом их распределения по углу поворота эксцентрика в пределах окружности. На фиг.4 показан график накопления импульса силы эксцентрика от действия всех n постоянных магнитов за каждый его полный оборот без учета момента трения и присоединенной нагрузки, выраженный в виде среднего вращательного момента, постоянно действующего в эксцентрике. На фиг.5 представлены графики мощностей - от вращательного момента, создаваемого вихревым магнитным полем, и от момента потерь - в функции скорости вращения эксцентрика. На фиг.6 дана схема модифицированного устройства, обеспечивающего существенное снижение потерь на трение в оси вращения вследствие динамической сбалансированности вращающегося ротора, вместо эксцентрика.
На фиг.1 реализующее способ устройство состоит из:
1 - ферромагнитного тела массой m, объемом ν с относительной магнитной проницаемостью µ,
2 - рычага длиной R закрепления ферромагнитного тела эксцентрика,
3 - оси вращения эксцентрика,
4-15 - постоянных магнитов, установленных равнонаклонно к окружности радиуса R и обращенных к ней одним из полюсов (например, южными полюсами s), точка пересечения плоскости которых с продольной магнитной осью удалена от указанной окружности (траектории вращения ферромагнитного тела 1) на расстояние d.
Ферромагнитное тело 1 с рычагом 2 показано на фиг.1 в угловом положении β относительно оси Х. Ось вращения эксцентрика помещена в точке О, точка А лежит на полюсе постоянного магнита 5, продольная магнитная ось постоянного магнита 5 совмещена с касательной АВ к окружности в точке В. В представленной схеме использовано 12 одинаковых по параметру D и одинаково наклоненных постоянных магнитов, симметрично расположенных относительно указанной окружности через углы ΔΘ=2π/12=30°.
На фиг.2 представлены графики движения ферромагнитного тела 1 относительно одного из постоянных магнитов 4-15 при различных моментах трения и присоединенной нагрузки в оси вращения 3, дающие качественное представление о процессах взаимодействия.
Верхний график - нагрузка на ось вращения весьма малая (процесс колебательный затухающий с максимальным начальным расстоянием ферромагнитного тела от полюса магнита, конечное отклонение в положении ферромагнитного тела практически нулевое).
Средний график - нагрузка на ось вращения большая (процесс апериодический затухающий с минимальным начальным расстоянием ферромагнитного тела от полюса магнита, конечное отклонение - положительное, не доходя до положения полюса магнита).
Нижний график - нагрузка на ось вращения оптимальная (процесс колебательно-апериодический затухающий с одним полупериодом колебания при большем начальном расстоянии ферромагнитного тела от полюса магнита, чем для среднего графика, конечное отклонение - отрицательное, переходя положение полюса постоянного магнита).
На фиг.3 указаны двенадцать симметрично распределенных по окружности графиков движущих эксцентрик сил в соответствующих угловых промежутках размерами ΔΘ. Видно, что максимумы этих функций существенно больше абсолютной величины их минимумов, что связано с конфигурацией диаграммы направленности ξ(α) постоянных магнитов подковообразной формы (на фиг.1 для простоты начертания изображены постоянные магниты прямоугольной формы). Это, в частности, позволяет при соответствующем выборе числа n постоянных магнитов, выборе параметра γ и величины D, определяющей напряженность магнитного поля Н0 в плоскости полюсов магнитов, обеспечить частичную или полную компенсацию сил торможения предыдущего постоянного магнита силами ускорения от последующего по ходу вращения эксцентрика постоянного магнита.
На фиг.4 представлен график совместного действия всех использованных в устройстве постоянных магнитов, в результате чего получается средний вращательный момент, постоянно действующий в эксцентрике.
На фиг.5 показаны два графика - график полезной мощности, вырабатываемой в эксцентрике, и график мощности, затрачиваемой на преодоление трения и присоединенной нагрузки, - в функции скорости вращения эксцентрика. Точка пересечения этих графиков определяет значение установившейся скорости вращения в устройстве. При увеличении нагрузки кривая мощности потерь поднимается под большим углом относительно оси абсцисс, что соответствует смещению указанной точки пересечения графиков мощностей влево, то есть ведет к уменьшению установившегося значения NУСТ скорости вращения эксцентрика.
На фиг.6 изображена одна из возможных схем осуществления устройства, в которой ротор выполнен в виде динамически уравновешенной конструкции, например, на основе трех ферромагнитных тел, расположенных под углами 120° на равных расстояниях R от оси вращения и имеющих одинаковые массы, что не создает при вращении ротора вибрационной нагрузки на ось вращения, как в случае эксцентрика на фиг.1, из-за действия центростремительных сил (последние в таком роторе уравновешивают друг друга). Кроме того, увеличение числа ферромагнитных тел приводит и к увеличению полезной мощности в устройстве пропорционально числу таких ферромагнитных тел. Число использованных постоянных магнитов на этом чертеже уменьшено для упрощения чертежа. На самом деле это число выбирают по формуле n=hр+1, где h - число ферромагнитных тел в роторе, р=0, 1, 2, 3, … - целое число, что станет понятно из последующего описания.
Рассмотрим операционную сущность заявляемого способа путем рассмотрения действия реализующего его устройства, представленного на фиг.1.
Учитывая вид диаграммы направленности ξ(α) напряженности магнитного поля Н(α), можно понять, что на равных расстояниях от точки пересечения линии АО с окружностью радиуса R до этой точки и после нее напряженность магнитного поля будет разной, а именно: до этой точки по ходу вращения ферромагнитного тела напряженность магнитного поля выше, чем после этой точки. Следовательно, сила притяжения рассматриваемым магнитом будет больше, чем сила торможения, что видно из фиг.3 для каждого из n постоянных магнитов. Это приводит к накоплению момента импульса при вращении эксцентрика и сообщению последнему вращательного движения неограниченно долго, если образующийся вращательный момент (фиг.4) превосходит момент трения (и присоединенной нагрузки).
Рассмотрим, в частности, взаимодействие ферромагнитного тела 1 с постоянным магнитом 5 (фиг.1). Данный постоянный магнит расположен так, что его продольная магнитная ось совпадает с касательной АВ к окружности радиуса R в точке В. Точка А при этом находится на плоскости магнитного полюса и является точкой пересечения этой плоскости продольной магнитной осью АВ. Расстояние ОА=R+d, то есть точка А находится на расстоянии d от данной окружности, как это указано для постоянного магнита 7. Обозначив через безразмерный параметр γ отношение γ=d/R, величина отрезка АВ находится из выражения r0=АВ=R(2γ+γ2)1/2. Угол ΔΘ=2π/n определяет угловой интервал в расположении постоянных магнитов симметрично относительно данной окружности, а угловое положение соответствующего постоянного магнита, отсчитываемое от оси Х системы координат, равно Θi=2πi/n, где i=1, 2, 3, … 12. Мгновенное угловое положение ферромагнитного тела 1 с рычагом 2 обозначим через β, а угловое положение точки В на окружности относительно оси Х обозначаем как β0i (для постоянного магнита 5 точка В находится на оси X, поэтому угол β01=0). Для постоянного магнита 6 угол β02=ΔΘ, для постоянного магнита 7 β03=2ΔΘ и т.д., а для постоянного магнита 4 β012=11ΔΘ. Углы β0i и Θi соотносятся между собой на постоянную разность Θi-β0i=arccos[1/(1+γ)]. Путем несложных преобразований расстояние от центра ферромагнитного тела до точки А на полюсе постоянного магнита 5 (в общем случае для i-го постоянного магнита) находится из выражения:

для диапазона 0≤β≤2π. Для постоянного магнита 5 значение Θ1 выбирается равным ΔΘ. Угол α между продольной магнитной осью АВ постоянного магнита 5 и линией между центром ферромагнитного тела 1 и точкой А находится из выражения:

путем взятия обратной тригонометрической функции α=arcos Q. Отметим, что на фиг.1 угол α>π/2, то есть ферромагнитное тело находится в тормозящем магнитном поле постоянного магнита 5 и в ускоряющем магнитном поле постоянного магнита 6.
Подставляя найденное из (3) значение α в выражение (1), получим для диаграммы ξ(α) соотношение:

Напряженность магнитного поля в точке нахождения ферромагнитного тела относительно магнитного полюса определяется расстоянием r(β) согласно (2) и равна с учетом (4):

а сила притяжения FM(β) ферромагнитного тела постоянным магнитом определяется как:

где D=µ0µνS2Н0 2/8π2R5, как было указано выше.
Вектор магнитной силы FM(β), спроецированный на ортогональ к рычагу эксцентрика, определяет магнитную движущую эксцентрик силу FМ ДВ(β), которая определяется как:

и которая определяет вращательный момент М(β)=FМ ДВ(β)R, среднее значение которого МCP, определяемое интегрированием по промежутку 0≤β≤2π сил FМ ДВ(β) для всех n постоянных магнитов, вид которых показан на фиг.3, представлено на фиг.4 без учета момента трения и момента присоединенной нагрузки.
Полезная мощность PВР=МСРω, где ω - угловая скорость вращения эксцентрика; ее график указан в виде наклонной прямой на фиг.5. Как известно, сила трения (присоединенной нагрузки) пропорциональна скорости вращения эксцентрика, поэтому мощность потерь представляется параболической кривой на фиг.5. Скорость вращения эксцентрика N=ω/2π [об/с] увеличивается до величины NУСТ, при которой полезная мощность и мощность потерь на трение и присоединенную нагрузку равны друг другу. Это графически отражено на фиг.5 точкой пересечения наклонной прямой с параболой. Следовательно, в режиме холостого хода (то есть при действии только трения в оси вращения) угловая скорость эксцентрика максимальна и уменьшается при присоединении к оси вращения внешней нагрузки, как это характерно, например, для двигателей постоянного тока с сериесным включением.
Работа устройства, реализующего заявляемый способ, основана на организации магнитопериодической структуры с ориентацией продольных магнитных осей постоянных магнитов (или электромагнитов) от одноименных полюсов по касательным к окружности, являющейся траекторией вращательного движения ферромагнитного тела, при этом вихревое магнитное поле, тянущее ферромагнитное тело по окружности в одном направлении, возникает вследствие превышения напряженности магнитного поля в направлении продольной магнитной оси по отношению к иным угловым направлениям, что определено диаграммой направленности ξ(α) согласно выражениям (1) и (4).
Для понимания процессов формирования вихревого магнитного поля, адекватного вращающемуся магнитному полю, в такой сугубо статической структуре необходимо показать, что наклонно установленным постоянным магнитом можно привести в движение ферромагнитное тело так, что оно в зависимости от величины силы трения, действующего на ферромагнитное тело, будет приведено либо в колебательное затухающее движение с остановкой его вблизи полюса постоянного магнита с практически нулевым смещением того или иного знака относительно точки А постоянного магнита (как для магнита 5 на фиг.1), либо будет остановлено до или после линии АО, как это представлено на средней и нижней диаграммах на фиг.2. При существенной величине трения ферромагнитное тело остановится, не доходя до линии АО (положительное остаточное смещение). Это обстоятельство легко объясняется тем, что движущая эксцентрик сила согласно выражению (7) пропорциональна cos(α+β-β0i), аргумент которого при нахождении ферромагнитного тела точно против точки А равен π/2, поскольку β=β0i и α=π/2, то есть при точном совпадении центра ферромагнитного тела с линией АО движущая магнитная сила FМ ДВ(β) равна нулю, и ферромагнитное тело при наличии трения никогда не может занять положение на линии АО, не считая фактора его движения по инерции. Это показано на средней диаграмме фиг.2. Если трение выбрано оптимальным, ферромагнитное тело притягивается постоянным магнитом более интенсивно, чем тормозится им, поэтому центр ферромагнитного тела перейдет линию АО по инерции, как при затухающем колебательном режиме с малым трением, и остановится за линией АО (отрицательное остаточное смещение), что указано на нижней диаграмме фиг.2.
Указанные рассуждения исходили из того, что ферромагнитное тело находилось в покое или с ничтожно медленным вращением. Поэтому при очень малом трении (в современных подшипниках коэффициент трения может иметь величину ≥0,0005) расстояние между полюсом магнита и ферромагнитным телом, на котором магнит начинает приводить в движение ферромагнитное тело, является достаточно большим (на фиг.2 для верхней диаграммы это расстояние равно единице в относительных величинах). При большом трении указанное расстояние минимально (на средней диаграмме фиг.2 оно равно 0,25), а при оптимальном трении это расстояние больше указанного минимального, но меньше максимального (на нижней диаграмме фиг.2 оно равно 0,75). Последнее означает, что при таком оптимальном трении ферромагнитное тело получает достаточное ускорение и проскакивает по инерции линию АО, как при колебательном движении с малым трением, но после совершения полупериода колебаний останавливается, существенно не доходя до линии АО. При этом ферромагнитное тело остановилось бы и продолжало оставаться в состоянии покоя, если на него не стало бы действовать ускоряющее магнитное поле следующего постоянного магнита 6 (фиг.1). Поскольку пуск устройства в работу предполагает однократное сообщение эксцентрику внешнего момента импульса, то есть приведению его принудительно во вращательное движение, то в случае оптимального трения эксцентрик движется по инерции, получая всякий раз со стороны последовательности постоянных магнитов однонаправленно действующие (в интегральной интерпретации) моменты импульсов, что и поддерживает движение эксцентрика неограниченно долго в образовавшемся вихревом магнитном поле.
Таким образом, оказавшись за линией АО, ферромагнитное тело испытывает притяжение следующего по ходу вращения постоянного магнита 6 и продолжает свое движение к нему, а затем к постоянному магниту 7 и т.д. по кругу. Система постоянных магнитов построена так, что тормозящее магнитное поле предыдущего постоянного магнита частично или полностью подавляется ускоряющим магнитным полем следующего постоянного магнита. Это достигается выбором числа n постоянных магнитов и постоянной параметра γ, а также конструкцией постоянных магнитов, определяемой константой D. На фиг.3 магнитные движущие силы FМ ДВ(β) распределены в диапазоне углов 2π так, что нет полной компенсации сил торможения силами ускорения, хотя максимумы последних приблизительно втрое больше модулей минимумов торможения (а не вдвое, что указывает на частичность указанной компенсации). Если увеличить число n постоянных магнитов, например, увеличением радиуса R или сокращением зазора d (то есть уменьшением γ), можно существенно ослабить влияние фактора торможения и повысить полезную мощность устройства.
При движении ферромагнитного тела относительно группы постоянных магнитов происходит подпитка вращательного состояния вращательными импульсами одного знака со стороны последовательности постоянных магнитов, располагаемых по замкнутой траектории (окружности), что приводит к непрерывному вращательному движению ферромагнитного тела. Как отмечено выше, пуск устройства в работу производят однократным внешним воздействием с заданной начальной угловой скоростью. Из неподвижного состояния устройство не может перейти в режим вращательного движения самопроизвольно, что характеризует это устройство как генератор с жестким режимом самовозбуждения.
Соответствующий расчет устройства из двенадцати постоянных магнитов (n=12) с сечением их полюсов S=8,5.10-4 м2, ферромагнитного тела массой m=0,8 кг, объемом тела ν=10-4 м3 и с относительной магнитной проницаемостью µ=2200, с рычагом длиной R=0,2 м и зазором d=0,03 м (γ=0,15) производился по программе Microsoft Excel при выборе постоянных магнитов с напряженностью магнитного поля на полюсах Н0=1 кА/м для значения D=10-4 н. Результаты этих расчетов представлены на графиках фиг.3, 4 и 5 в количественном представлении.
Недостатком устройства с ротором в виде эксцентрика является наличие его существенной вибрации. Для ее устранения следует использовать динамически уравновешенные роторы из нескольких (h) симметрично расположенных ферромагнитных тел, как это схематически показано на фиг.6. Кроме того, это приводит к увеличению в h раз выходной (полезной) мощности устройства. Ранее была дана ссылка на то, что число постоянных магнитов n в таком устройстве должно быть равно n=рh+1. Так, при h=3 число n может быть равно числам n=4, 7, 10, 13, 16 и т.д. Это позволяет существенно снизить вибрации от получаемых ротором импульсов силы. Кроме того, внутри ферромагнитных тел могут быть выполнены катушки индуктивности, в которых индуцируются э.д.с. благодаря периодическому намагничиванию и размагничиванию ферромагнитных тел при их движении относительно магнитной системы. Интересно то, что эти э.д.с. имеют частоту колебаний f=Nn и оказываются сдвинутыми по фазам колебаний друг от друга на 120°, как в трехфазном генераторе. Это может быть использовано в слаботочной энергетике в качестве генерирующего трехфазный переменный ток модуля с повышенной частотой (с частотой 400…1000 Гц), например, для электропитания гироскопов в автономном космическом полете. Вывод трехфазного тока с катушек индуктивности ферромагнитных тел осуществляется с помощью изолированных кольцевых электродов, снабженных контактными щетками.
Наконец, следует отметить, что при увеличении числа n постоянных магнитов так, что ΔΘ>2π/n, как об этом указано в формуле изобретения (на фиг.1 ΔΘ=2π/n), при соответствующем увеличении параметра γ увеличивается длина отрезка r0 и происходит перекрытие зон притяжения ферромагнитного тела смежными постоянными магнитами, что позволяет нейтрализовать действие зон торможения и повысить мощность устройства.
Феномен получения вихревого магнитного поля от статического устройства и без потери магнитных свойств используемых постоянных магнитов вступает в противоречие с существующими представлениями о невозможности создания «perpetum mobile», поэтому физикам-теоретикам, занимающимся проблемами магнетизма, необходимо будет найти объяснение данному явлению. Аналогичные феномены были установлены автором [2-5] при исследовании движения ферромагнитных колец в периодических магнитных структурах с насыщающими магнитными полями при использовании известного свойства магнитной вязкости ферромагнетиков, а также свойства уменьшения относительной магнитной проницаемости ферромагнетиков в насыщающих магнитных полях (кривая А.Г.Столетова, 1872 г.).
Апробацию устройства, реализующего заявляемый способ, следует поручить МИФИ (Москва) или Институту РАН, связанному с прикладными вопросами магнетизма и энергетики. Следует рекомендовать патентование изобретения в основных развитых странах.
Литература
1. Эберт Г., Краткий справочник по физике, пер. с нем., под ред. К.П.Яковлева, изд. 2-ое, ГИФМЛ, М., 1963, стр.420.
2. Меньших О.Ф., Ферромагнитный термодинамический эффект. Заявка на открытие с приоритетом от 23.07.2007, М., МААНО.
3. Меньших О.Ф., Магнитовязкий маятник, Патент РФ №2291546 с приоритетом от 20.04.2005, Опубл. в бюлл. №1 от 10.01.2007.
4. Меньших О.Ф., Ферромагнитовязкий ротатор, Патент РФ №2309527 с приоритетом от 11.05.2005, Опубл. в бюлл. №30 от 27.10.2007.
5. Меньших О.Ф., Магнитовязкий ротатор, Патент РФ №2325754 с приоритетом от 02.10.2006, Опубл. в бюлл. №15 от 27.05.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОВЯЗКИЙ РОТАТОР | 2006 |
|
RU2325754C1 |
| ФЕРРОМАГНИТОВЯЗКИЙ РОТАТОР | 2005 |
|
RU2309527C2 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ МАГНИТНОГО СИЛОВОГО ВЗАИМОДЕЙСТВИЯ | 2010 |
|
RU2421747C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2452074C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВЯЗКОСТИ ФЕРРОМАГНЕТИКОВ | 2007 |
|
RU2338216C1 |
| ФЕРРОМАГНИТОВЯЗКИЙ ДВИГАТЕЛЬ | 2007 |
|
RU2359398C1 |
| ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С КОСОКРУГОВЫМИ ОБМОТКАМИ | 2013 |
|
RU2554924C2 |
| СПОСОБ КОСОКРУГОВОГО НАМАГНИЧИВАНИЯ ФЕРРОМАГНИТНОГО ТОРОИДА | 2008 |
|
RU2391730C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ЭНЕРГИИ ВЗАИМОДЕЙСТВИЯ ФЕРРОМАГНЕТИКА С МАГНИТНЫМ ПОЛЕМ | 2008 |
|
RU2377590C1 |
| СПОСОБ КОСОКРУГОВОГО НАМАГНИЧИВАНИЯ ФЕРРОМАГНИТНОГО ТОРОИДА | 2009 |
|
RU2392681C1 |
Изобретение относится к физике магнетизма, к получению однонаправленного пульсирующего вихревого магнитного поля, создающего тянущее по окружности магнитное поле по отношению к движущемуся в нем ферромагнитному телу. Способ создания вихревого магнитного поля вдоль некоторой окружности, эквивалентный вращению магнитного поля, состоит в том, что несколько постоянных магнитов симметрично располагают относительно окружности. Продольные магнитные оси постоянных магнитов совмещают с касательными к указанной окружности в точках, расположенных симметрично на этой окружности. Число n постоянных магнитов находят из условия 2π/n≤ΔΘ, где угол ΔΘ=arccos[1/(1+γ)], параметр γ=d/R, a d - расстояние от точек пересечения продольных магнитных осей постоянных магнитов с их плоскостями полюсов до указанной окружности радиуса R. Силовую функцию постоянных магнитов D и параметр γ выбирают, чтобы тормозящий момент, создаваемый предыдущим магнитом, частично или полностью компенсировался ускоряющим моментом последующего магнита по направлению вихревого магнитного поля. Величина D=µ0µνS2H0 2/8π2R5, где µ0=1,256.10-6 Гн/м - абсолютная магнитная проницаемость вакуума, µ - относительная магнитная проницаемость ферромагнитного тела объемом ν, которое взаимодействует с магнитным полем, напряженность которого равна Н0 в плоскости полюсов постоянных магнитов с поперечным сечением их полюсов S. Технический результат состоит в получении вращательного движения ферромагнитного тела, то есть в получении механической (электрической) энергии от статической магнитопериодической структуры. 6 ил.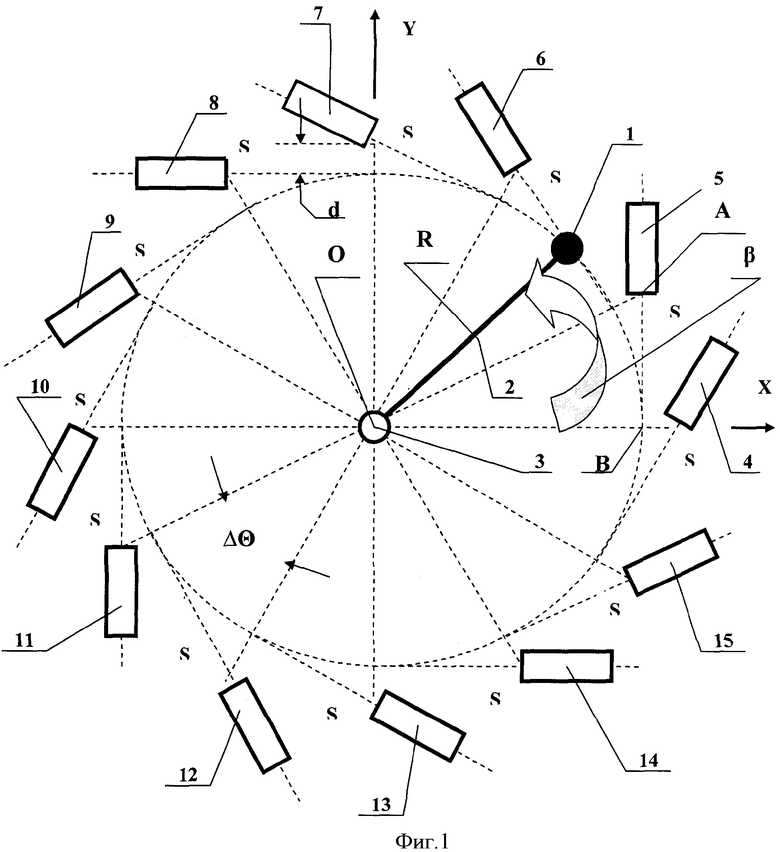
Способ создания вихревого магнитного поля, состоящий в том, что несколько постоянных магнитов симметрично располагают относительно окружности, продольные магнитные оси постоянных магнитов совмещают с касательными к указанной окружности в точках, расположенных симметрично на этой окружности, а число n постоянных магнитов находят из условия 2π/n≤ΔΘ, где угол
ΔΘ=arccos[1/(1+γ)], параметр γ=d/R, a d - расстояние от точек пересечения продольных магнитных осей постоянных магнитов с их плоскостями полюсов до указанной окружности радиуса R, силовую функцию постоянных магнитов D и параметр γ выбирают так, чтобы тормозящий момент, создаваемый предыдущим постоянным магнитом, частично или полностью компенсировался ускоряющим моментом последующего постоянного магнита по направлению вихревого магнитного поля, причем величина D=µ0µνS2H0 2/8π2R5, где µ0=1,256·10-6 Гн/м - абсолютная магнитная проницаемость вакуума, µ - относительная магнитная проницаемость ферромагнитного тела объемом ν, которое взаимодействует с магнитным полем, напряженность которого равна Но в плоскости полюсов постоянных магнитов с поперечным сечением их полюсов S.
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ ВИХРЕВОГО ЭЛЕКТРИЧЕСКОГО ПОЛЯ В МАГНИТНОЙ СРЕДЕ | 2006 |
|
RU2303295C1 |
| ФЕРРОМАГНИТОВЯЗКИЙ РОТАТОР | 2005 |
|
RU2309527C2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВЗАИМОСВЯЗАННЫХ ПЕРЕМЕННОГО МАГНИТНОГО И ВИХРЕВОГО ЭЛЕКТРИЧЕСКОГО ПОЛЕЙ (ВАРИАНТЫ) | 2001 |
|
RU2207645C2 |
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ТЕРМОЯДЕРНОЙ УСТАНОВКИ ТИПА "ТОКАМАК | 1992 |
|
RU2022374C1 |
| RU 2059329 С1, 27.04.1994 | |||
| Трансформаторный вихретоковый преобразователь с вращающимся магнитным полем | 1991 |
|
SU1826053A1 |
| Видоизменение охарактеризованного в патенте № 14065 сигнального устройства для предупреждения о наступившем опасном перегреве шатунных головок и т.п. | 1929 |
|
SU17066A1 |
| JP 3016554 А, 24.01.1991. | |||

