Изобретение относится к области производства электронных изделий, а именно к транспортному оборудованию для перемещения пластин бесконтактным способом при реализации различных технологических процессов. Кроме этого, может быть использовано на предприятиях с повышенными требованиями к сохранению качества поверхности изделий при транспортировании, на взрывопожароопасных предприятиях, а также на предприятиях с высокими экологическими требованиями.
Наиболее близким техническим решением является пневматический захват (а.с. №628074, М. кл2. В66С 1/02 15.10.1978 в бюл. №38), содержащий корпус с подводящими воздух патрубком, обтекателем, имеющим в нижней части полость, соединенную каналом с источником вакуума, выполненного в виде сопла, соединяющего канал и наружную поверхность обтекателя под острым углом.
Недостатком этой конструкции является наличие механического контакта транспортируемой детали с элементами конструкции пневматического захвата. В процессе эксплуатации устройство требует проведения регулировочных работ для получения эффективного схватывания детали. Наличие канала и сопла, соединяющего полость и наружную поверхность, диффузора, а также кожуха - все это усложняет конструкцию пневматического захвата.
Технической задачей предлагаемого изобретения является упрощение конструкции и расширение функциональных возможностей устройства.
Поставленная задача достигается тем, что в аэродинамическом захвате, содержащем корпус с подводящими воздух каналами, обтекатель, имеющий в нижней части полость, согласно изобретению в корпусе выполнена снабженная кольцевым соплом и дросселями кольцевая пневмокамера, внутренняя стенка которой является обтекателем кольцевой формы с кольцевой полостью.
Технический результат от применения предлагаемого изобретения обусловлен тем, что обеспечивается полное исключение механического контакта элементов устройства и транспортируемой пластины. При этом отсутствует необходимость в проведении регулировочных работ в процессе эксплуатации.
Общий вид предлагаемого устройства представлен на чертежах, где на фиг.1 показана аксонометрическая проекция устройства и пластины с разрезами; на фиг.2 - пластина и сечения кольцевой пневмокамеры, кольцевого сопла, дросселя; на фиг.3 - положение кольцевой струи и направление сил, действующих на пластину; на фиг.4 - схема действия сил на пластину при ее центральном положении относительно устройства; на фиг.5 - схема сил при смещении пластины относительно точки симметрии устройства.
Аэродинамический захват содержит в корпусе 1 кольцевую пневмокамеру 2, в нижней стенке которой выполнены дроссели 3 и кольцевое сопло 4. Ось этого сопла расположена под углом α относительно верхней плоскости пластины 5. Внутренняя стенка пневмокамеры 2 выполнена в форме обтекателя 6, в нижней части которого имеется кольцевая полость 7. В верхней стенке пневмокамеры 2 выполнены входные каналы 8.
Устройство работает следующим образом. В кольцевую пневмокамеру 2 подается сжатый воздух через входные каналы 8, симметричное расположение которых относительно центральной оси устройства обеспечивает равномерное распределение избыточного давления. Кольцевое сопло 4 формирует струйный поток 9 (фиг.3), который отклоняется от прямолинейного движения благодаря наличию вакуума в кольцевой полости 7. Вакуум в кольцевой полости 7 создается за счет эжектирующего действия струйного потока 9. При этом на пластину 5 начнет действовать перепад давления, создающий силу F1 (фиг.3), которая стремится прижать пластину 6 к нижней стенке пневмокамеры 2. Наличие дросселей 3 в этой стенке обеспечит подачу сжатого воздуха из пневмокамеры 2 и создание воздушной подушки 10 (фиг.3), которая исключит механический контакт пластины 5 с элементами устройства. Радиальные смещения пластины 5 ограничены силовым воздействием наклонного струйного потока 9, которое образует кольцевую зону струйного воздействия 11 (фиг.4, фиг.5) на пластину 5 за счет касательных напряжений F2, расположенных на периферии пластины 5. При совпадении центра пластины 5 и центра устройства ширина кольцевой зоны струйного воздействия 11 будет постоянна (фиг.4), поэтому суммарное силовое воздействие F2 будет равно нулю. В случае смещения центра пластины 5 относительно центральной оси устройства ширина кольцевой зоны струйного воздействия 11 изменится таким образом, что суммарное силовое воздействие F2 (фиг.5) будет направлено в сторону, противоположную смещению пластины 5, и будет стремиться вернуть пластину 5 в центральное положение.
Таким образом, струйный поток 9 создает в полости 7 вакуум, удерживающий пластину 5, и обеспечивает центрирование этой пластины относительно оси симметрии устройства. При этом между пластиной 5 и устройством отсутствует механический контакт, а силовое воздействие на нее осуществляется струйными потоками воздуха.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ВИННИКОВА И.К. | 1995 |
|
RU2097965C1 |
| ВЫСЕВАЮЩИЙ АППАРАТ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 2016 |
|
RU2624968C1 |
| УСТРОЙСТВО ДЛЯ СЕПАРАЦИИ СЫПУЧЕЙ СМЕСИ | 2001 |
|
RU2207920C1 |
| ВОЗДУШНАЯ ТУРБИНА ПРИВОДА ЛЕБЕДКИ ДЛЯ РОСПУСКА И ПОДБОРА АНТЕННЫ | 2004 |
|
RU2276272C2 |
| Пневматический захват | 1977 |
|
SU628074A1 |
| УСТРОЙСТВО ДЛЯ ПРИСОЕДИНЕНИЯ КРИСТАЛЛОВ К ОСНОВАНИЯМ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1991 |
|
RU2016725C1 |
| МЕЛКОДИСПЕРСНЫЙ ДОЖДЕВАТЕЛЬ-ОПРЫСКИВАТЕЛЬ | 2024 |
|
RU2827163C1 |
| СПОСОБ КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА И ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2199099C2 |
| Трехосный измеритель воздушной скорости | 2020 |
|
RU2762539C1 |
| Пневматический высевающий аппарат | 1988 |
|
SU1613020A1 |
Изобретение относится к области производства электронных изделий, а именно к транспортному оборудованию для перемещения пластин бесконтактным способом при реализации различных технологических процессов. Аэродинамический захват содержит корпус с подводящими воздух каналами и обтекатель, имеющий в нижней части полость. В корпусе аэродинамического захвата выполнена снабженная кольцевым соплом и дросселями кольцевая пневмокамера, внутренняя стенка которой является обтекателем кольцевой формы с кольцевой полостью. Достигается упрощение конструкции и расширение функциональных возможностей устройства. 5 ил.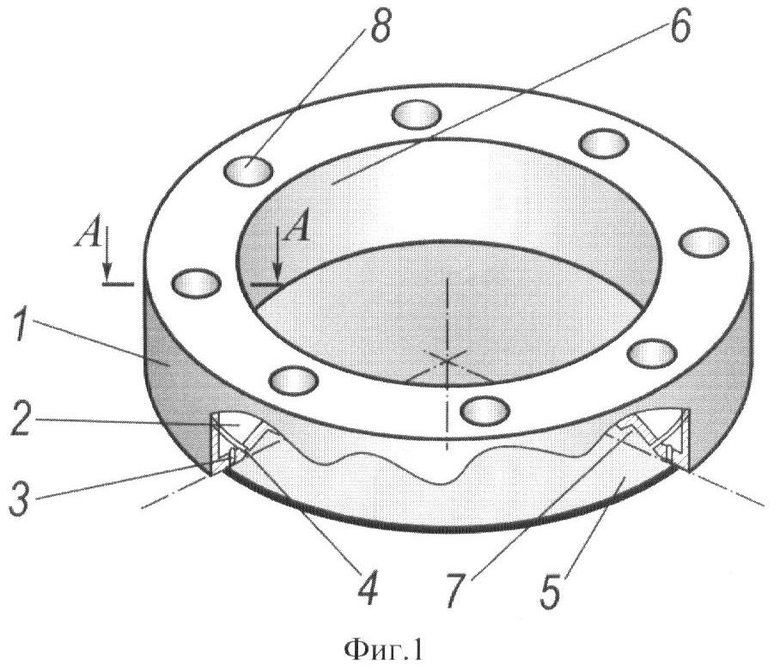
Аэродинамический захват, содержащий корпус с подводящими воздух каналами и обтекатель, имеющий в нижней части полость, отличающийся тем, что в корпусе выполнена снабженная кольцевым соплом и дросселями кольцевая пневмокамера, внутренняя стенка которой является обтекателем кольцевой формы с кольцевой полостью.
| Пневматический захват | 1977 |
|
SU628074A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2001 |
|
RU2199432C2 |
| Гидрокопировальное следящее устройство к токарным станкам | 1958 |
|
SU118678A1 |
| JP 61254437 А, 12.11.1986. | |||

