(54) ПНЕВМАТИЧЕСКИЙ ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захват | 1977 |
|
SU632634A1 |
| АЭРОДИНАМИЧЕСКИЙ ЗАХВАТ | 2008 |
|
RU2366604C1 |
| УНИВЕРСАЛЬНЫЙ ЭЖЕКТОРНЫЙ ПЫЛЕСОС РАТНИКОВА В.Н. | 1997 |
|
RU2119762C1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| УСТРОЙСТВО ПЫЛЕПОДАВЛЕНИЯ ПРИ ВЫБИВКЕ ЛИТЕЙНЫХ ФОРМ | 2011 |
|
RU2486029C2 |
| УНИВЕРСАЛЬНЫЙ ЭЖЕКТОРНЫЙ ПЫЛЕСОС ДЛЯ СБОРА РАЗЛИЧНЫХ ЗАГРЯЗНЕНИЙ, В ТОМ ЧИСЛЕ И ЖИДКИХ | 1998 |
|
RU2135065C1 |
| Устройство для сборки деталей | 1979 |
|
SU917994A1 |
| Устройство для отсоса стружки из зоны резания металлорежущего станка | 1982 |
|
SU1096081A1 |
| Устройство для обработки поверхности дробью | 1979 |
|
SU891404A1 |
| Пневматический схват | 1984 |
|
SU1249813A1 |
Изобретение относится к области машиностроения и может быть использовано в качестве захватывающего устройства в промышленных роботах и манипуляторах.
Известны захватывающие устройства, содержащие корпус с подводащим воздух патрубком, закрепленный на корпусе ко жух и размещенный в нем обтекатель flj.
: В этом устройстве сжатый воздух поступает в внутреннюю полость корпуса,|Q
затем проходит по узкому кольцеообраз- ному канапу, попадает в -зазор между ожухом и перемещаемой деталью и выходит в атмосферу. При этом происходит, динамический отсос воздуха между переме-,5 аемой деталью и обтекателем, образуется азряжение и перемацаемая деталь наружым давлением плотно пршкимается к обтекателю.
В таком устройстве снижается грузо- 20 подъемность из-за попадания посторонних частиц между обтекателем и перемш1ае мой деталью, а также возможность применения только с деталями, обладаняцими, ллхжой повертностью.25
Наиболее близким к изобретению является пневматический захват, содержащий корпус с подводящим воздух патрубком, жестко закрепленный на корпусе кожух с установлейным, внутри него обтекателем, имеющим в нижней части полость, открытую с наружной стороны и соединенную каналом с источником .вакуума 2j.
Недсхзтатком такого захвата является необходимость в использовании дополнительного вакуум-насоса, что усложняет и удорожает конструкцию робота или манипулятора в целом.
Цепь, изобретения - упрощение конструкшш захвата.
Цель достигается тем, что источник вакуума выполнен в.виде сопла, соединяющего канал к наружную поверхность обтекателя под острым углом.
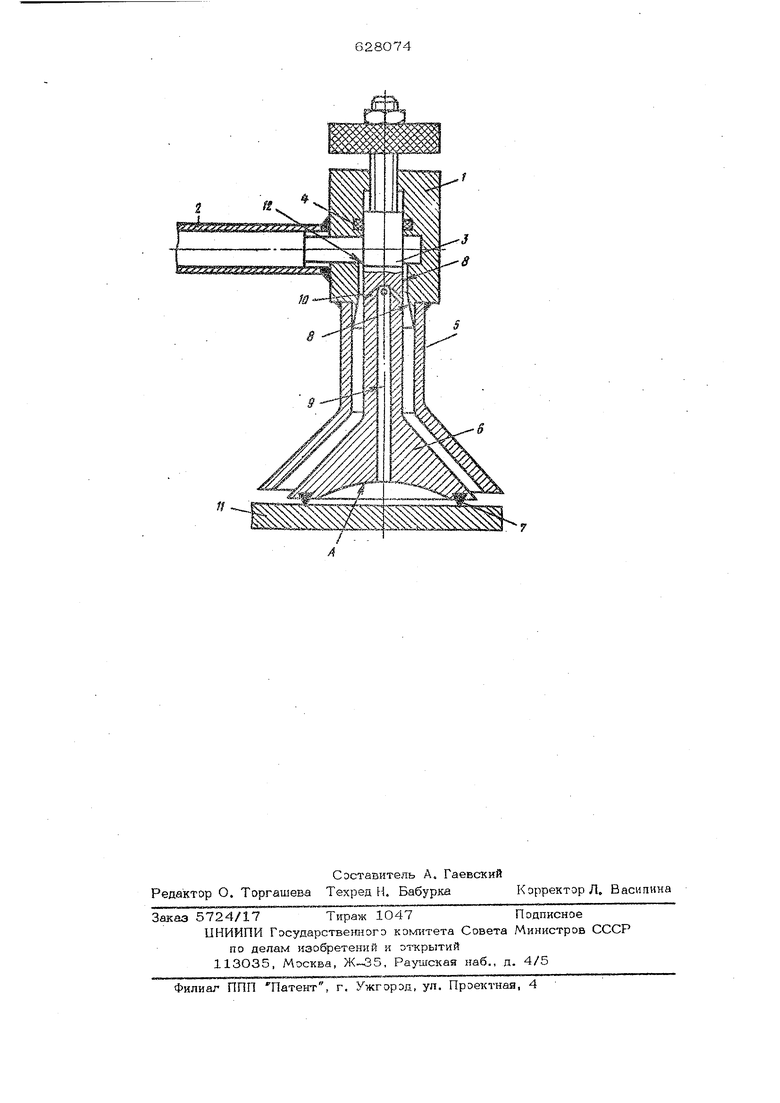
Такое выполнение захвата позволяет для создания разряжения под обтекателем использовать энергию сжатого газа и исгключить необходимость вспользс анвя до4 полнйтельного вакуумнасоСа. На чертеже изображен продольный пневматический зазюате раэреэ. Захват содержит корпус 1 с подводящим патрубком 2, в корпусе 1 раэмезде регулировочный винт 3 и уплотнительное кольцо ,4. К корпусу 1 жестко прикреплен кожух 5, а внутри его размещен обтека тель б, соединенный, например при помощи резьбового соединения, с регулировочн tibiM винтом 3. В обтекателе 6 с нижней стороны вьтолнена полость А, герметизировйнная уплотннтельным кольцом 7. В корпусе 1 выполнен диффузор 8, а в обте кателе имеется канал 9, соединяющий полость А через сопло Юс наружной поверхностью обтекателя 6. Обтекатель контактарует с перемещаемой деталью 11 и установлен в корпусе с зазором 12 между его наружной поверхностью и Верхней частью ди4Фузора R, Захват работает следующим образом. Сжатый воздух через пол одящий пе- рубок 2 поступает в корпус 1. Затем через зазор 12 поступает в диффузор 8 где скорость его резко возрастает, а дав ление падает. При этом через сопло Ю происходит отсос воздуха на полости А под обтекателем бив ней образуется разряжение, Даяеа воздух проходит по кольцевой шелн между когкухом 5- и обтекателем 6 и через зазор между кожухом 5 н перемещаемой деталью 11 выходит в атмосферу. При этом происходит днна. мигческий отсос воздуха по всему перимет ру кожуха 5, образуе1х:я разряжение и перемещаемая деталь 11 наружным давлением плотно прижимается к обтекателю 6. .Если перемещаемая деталь 11 амеет рнволзшейную юверхнсхпъ, то она удерживаетсз за счет разряжегшя, создаваемого .в nojJocTH А под обтекателем 6. Попере ное сечение каналов, по которым проходит сжатый.воадух, от Ещпнвдрического зааора 12 в корпусе 1 . до выхода в ат {осферу, непрерывно увеличивается, что осуществляется с помощью осевого перем€ ще5гая обтекателя 6 регулировочным винтом 3. Такое выполнение захвата позволяет ИСКЛЮЧИТЬ необходимость в вакуум-насосе, следовательно, упрмаает конструкцию робота ияй манипулятора в цепом и снижает ее себестоимость. Формула на обретенийПневматический захват, содержащий корпус с подводящш,- воздух патрубком, жестко закрепленигый на корпусе кожу: с установленным внутри него .обтекателем, имеющим в шгжнейчасти полость, открытую с нар -жиойст&роны а соединенную каналом с истошошом вакуума, о т п и чаюиднйсш тем, что, с целью упрощения конструкшш, и-сточ1йзк аакуума выполнен в виде сопла, соедкгшющего канал и наруашую поБрехнос1ъ вбтекателя под острым углом. Источ1д-жи йиформашш, ггринйтые во вш1манне при зкспертнзе; . 1, Авторское свидетельство СССР № 126595, кд, В 66 С 1/02, 1959. 2, Патент США № 3517985, кп. 294-64, 1968.
П
