Изобретение относится к медицинской технике и к технике, используемой в исследованиях по психофизиологии труда и в тренажерах для повышения качества отработки ручных рабочих операций.
Известно «Устройство для исследования координации движения» (Патент РФ №2008801, МКИ 5 А61В 5/16, А61В 5/11), содержащее электрический щуп, блок регистрации и датчик тремора, выполненный в виде направляющей дорожки с регулируемым зазором между токопроводящими пластинами, измерительный мост, одно из плеч образовано сопротивлением электролита, заполняющего направляющую дорожку датчика тремора, а щуп и токопроводящие пластины соединены с другим плечом измерительного моста, выход которого соединен с входом блока регистрации.
Недостатками известного устройства являются отсутствие возможности его использования в вертикальном положении и невозможность определять амплитуду тремора в пределах и за пределами установленного зазора.
Известно "Устройство для исследования динамического тремора" (SU 1560098 А1, кл. А61В 5/16, 30.04.1990), содержащее датчик, первый и второй аналого-цифровые преобразователи, вычислитель, генератор тактовых импульсов, блок формирования импульсов времени реализации, блок задания темпа. Датчик содержит панель из диэлектрика, имеющую прорезь замкнутой произвольной конфигурации, щуп с металлическим шарообразным наконечником, защищенный экраном, внутри которого расположен высокочастотный генератор, металлические пластины, лампочки задания темпа, катушки индуктивности. Блок формирования импульсов времени реализации составляющих тремора содержит элемент ИЛИ, триггер, элемент, счетчик, клавиатуру задания времени. Блок задания темпа содержит клавиатуру задания темпа, счетчик темпа, дешифратор темпа. Первый и второй аналого-цифровые преобразователи выполнены аналогично и содержат усилитель, детектор, фильтр низких частот, графический регистратор, дифференцирующий элемент, нуль-орган, три пороговых элемента, счетчик частоты тремора, три счетчика, элемент НЕ, элемент ИЛИ, первый элемент И, четвертый счетчик, управляемый генератор пилообразного напряжения, элемент сравнения, триггер, второй элемент И, блок управления коммутатором, коммутатор, цифровой регистратор и три переменных резистора.
Недостатками известного устройства являются невозможность движения по другим траекториям, кроме заданной, при необходимости менять их, ограниченность амплитуды тремора шириной, сделанной в пластине прорези, невозможность получения информации об угле наклона щупа, имитирующего некоторые рабочие инструменты.
Технический результат, достигаемый предлагаемым изобретением, заключается в упрощении конструкции устройства, в повышении точности определения уровня тремора, точности работы рук и расширении состава исследуемых характеристик.
Технический результат достигается тем, что датчик снабжен источником электромагнитного поля, выполненным с возможностью обеспечения его питания через первый усилитель от высокочастотного генератора, расположен над координатной плоскостью с электромагнитной матрицей, обмотки которой соединены с первым входом мультиплексора, второй вход мультиплексора соединен с первым выходом микроконтроллера, второй выход которого соединен с третьим входом быстродействующего выпрямителя, выход мультиплексора соединен со вторым усилителем, выход которого соединен с первым входом быстродействующего выпрямителя, а второй вход быстродействующего выпрямителя соединен с выходом фазорегулятора, вход которого соединен со вторым выходом высокочастотного генератора, выход быстродействующего выпрямителя соединен с микроконтроллером, третий выход которого соединен с компьютером.
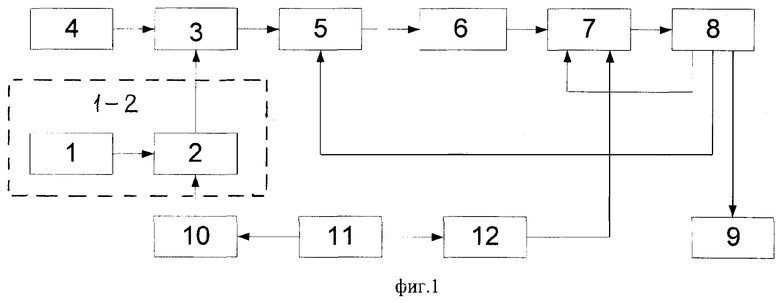
На фиг.1 изображена принципиальная схема устройства для определения положения объекта в ограниченном пространстве и точности работы рук испытуемого при движении ручного инструмента (тремора) по заданной траектории, содержащая датчик положения рук испытуемого или рабочего инструмента (1.2), включающий имитатор инструмента 1, источник электромагнитного поля 2, электромагнитную матрицу 3 и координатную плоскость 4 с нанесенной на ней графически заданной траекторией. Источник электромагнитного поля получает питание от высокочастотного генератора 11 через первый усилитель 10, а наводимые в обмотках электромагнитной матрицы напряжения подаются в мультиплексор 5, управляемый по первому выходу микропроцессором 8. С мультиплексора 5 наведенные напряжения поочередно подаются на усилитель 6, выход которого соединен с первым входом быстродействующего выпрямителя 7, управляемым по второму входу микроконтроллером 8 и по третьему входу фазорегулятором 12. Полученные напряжения на выходе выпрямителя 7 оцифровываются в микроконтроллере 8 и через его интерфейс подаются в компьютер 9 для обработки и представления информации о результатах испытания.
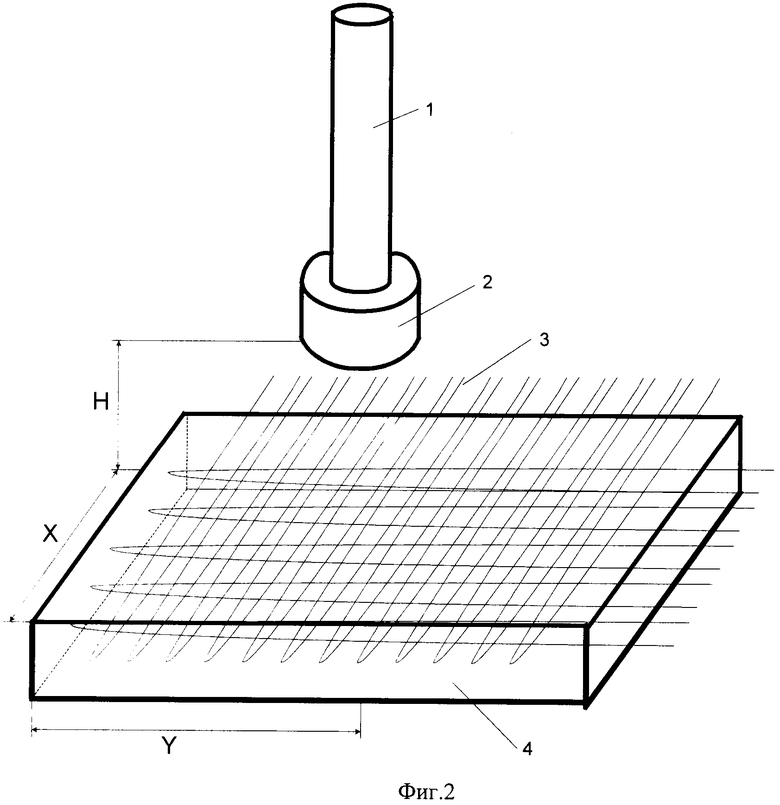
На фиг.2 изображено устройство датчика (1.2) с имитатором инструмента 1 и источником электромагнитного поля 2, электромагнитной матрицы 3 и координатной плоскости 4. Датчик для определения тремора или имитатор ручного инструмента 1 в руках испытуемого имеет укрепленный на конце источник электромагнитного поля 2. Электромагнитная матрица 3 используется для определения положения источника электромагнитного поля над координатной плоскостью 4 по поперечному X, продольному положению Y, по высоте Н и по углу наклона источника 2 относительно координатной плоскости.
Работа устройства происходит следующим образом. При анализе тремора датчик 1 выполняется в виде щупа, на конце которого наматывается катушка индуктивности 2, получающая питание от генератора переменного тока высокой частоты 11 (например, 100 килогерц) через усилитель 10 и являющаяся источником электромагнитного поля. Координатная плоскость 4 с нанесенной на ней графически требуемой траекторией движения или с точкой, относительно которой надо неподвижно удерживать щуп, размещается в любом требуемом положении: горизонтальном, вертикальном или под любым углом. Щуп подводится испытуемым к координатной плоскости на заданное исследователем расстояние и продвигается испытуемым по нарисованной на координатной плоскости траектории или непрерывно удерживается им на вытянутой руке в неподвижном состоянии с ориентацией на нарисованную на координатной плоскости точку. Все отклонения щупа 1 от заданной траектории движения или от точки приводят к изменению величины наведенных источником электромагнитного поля 2 напряжений на катушках электромагнитной матрицы 3, расположенной на координатной плоскости 4. Эти напряжения считываются с электромагнитной матрицы 3 мультиплексором 5, порядок и скорость считывания которого задается микроконтроллером 8. Полученные с мультиплексора 5 напряжения усиливаются усилителем 6 и подаются на быстродействующий выпрямитель 7, который осуществляет двухполупериодное выпрямление напряжений за счет управления им фазорегулятором 12, получающим информацию о выпрямляемом полупериоде от высокочастотного генератора 11 и от микроконтроллера 8. Быстродействующий выпрямитель 7 реализован на двух микросхемах, каждая из которых выпрямляет один полупериод поступающего на его вход от усилителя 6 напряжения. При этом каждый из полупериодов поступающего напряжения может быть смещен относительно другого по фазе за счет отличия параметров каналов, по которым они проходят. Поэтому, получая информацию о выпрямляемом полупериоде от генератора высокой частоты 11, фазорегулятор 12 путем воздействия на вход выпрямляющих микросхем быстродействующего выпрямителя 7 корректирует их фазу, чем достигается максимальное, не искаженное по величине, выпрямленное напряжение на выходе выпрямителя 7. Полученные таким образом выпрямленные и усиленные напряжения отдельных катушек электромагнитной матрицы 3 в каждый момент считывания несут информацию о положении датчика электромагнитного поля 2 и, следовательно, щупа 1 относительно координатной плоскости 3. Поданные с микроконтроллера 8 в компьютер 9 эти напряжения по разработанным алгоритмам их обработки позволяют вычислить величину отклонения щупа 1 от заданий траектории движения или точки в каждый момент времени исследования, рассчитать скорость движения и представить график движения по траектории, определить частоту и амплитуду тремора.
При тренировке выполнения рабочих операций датчик 1 выполняется в виде инструмента, например электрода с электрододержателем у сварщика, с источником электромагнитного поля 2 в виде катушки индуктивности, намотанной на конце инструмента. Координатная плоскость 4 с нарисованными на ней траекториями необходимых рабочих движений может располагаться горизонтально, под углом, вертикально или в потолочном положении. При этом обучаемому может задаваться не только движение по траекториям, нанесенным на координатную плоскость 4, но и скорость движения по ним, угол наклона рабочего инструмента 1 относительно плоскости 4, а также расстояние до нее. При этом все отклонения рабочего инструмента 1 от заданной траектории движения, его расстояния до координатной плоскости 4 или от заданного угла его наклона приводят к изменению величины наведенных источником электромагнитного поля 2 напряжений на катушках электромагнитной матрицы 3, расположенной на координатной плоскости 4. Получение, преобразование и обработка информации с электромагнитной матрицы 3 при тренировке выполнения рабочих операций происходят аналогично использованию предлагаемого устройства для исследования тремора. Полученные при этом выпрямленные и усиленные напряжения отдельных катушек электромагнитной матрицы 3 в каждый момент считывания несут информацию о положении датчика электромагнитного поля 2, его расстоянии до координатной плоскости 4 и об угле его наклона и, следовательно, рабочего инструмента 1 относительно координатной плоскости 4. Поданные с микроконтроллера 8 в компьютер 9 эти напряжения по разработанным алгоритмам их обработки позволяют вычислить величину отклонения рабочего инструмента 1 от заданий траектории движения, расстояния или заданного наклона его относительно координатной плоскости в каждый момент времени исследования, рассчитать полученные отклонения, а также рассчитать скорость движения по траектории и представить результаты обработки данных в виде графиков или протоколов испытаний.
Таким образом, сопоставительный анализ с прототипами показывает, что заявляемое устройство отличается простотой конструкции, возможностью исследовать тремор при любом, а не только горизонтальном положении траектории движения. В связи с тем что для регистрации движения щупа или инструмента в руках испытуемого по заданной траектории используются электромагнитная матрица и источник электромагнитного поля, обеспечивающие бесконтактное определение его положения посредством измерения напряжений в электромагнитной матрице, то это дает возможность повысить точность информации об изучаемом явлении. При этом могут быть получены дополнительные характеристики об амплитуде тремора и его частоте, о величине и направлении отклонения от заданной траектории движения, о скорости движения по траектории, о расстоянии до координатной плоскости и о наклоне датчика относительно ее. При этом не требуется установка дополнительных, строго ориентированных по осям катушек индуктивности, создающих электромагнитное поле, а также большого количества датчиков положения и акселерометрических датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОФОРМАТНОЕ УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ЭВМ (ИНТЕРАКТИВНАЯ ДОСКА) | 2009 |
|
RU2420783C2 |
| Устройство для исследования динамического тремора | 1988 |
|
SU1560098A1 |
| Устройство для отработки навыков микрохирургической техники | 2020 |
|
RU2759411C2 |
| Устройство для исследования динамического тремора | 1984 |
|
SU1219052A1 |
| Биотехническое адаптируемое устройство для бесклавишного ввода информации и датчик активности пальца и кисти руки | 1991 |
|
SU1836676A3 |
| Устройство для оценки психофизиологических характеристик оператора систем управления | 1978 |
|
SU1003130A1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО ИССЛЕДОВАНИЯ СОСТОЯНИЯ ВЕГЕТАТИВНОЙ НЕРВНОЙ СИСТЕМЫ | 2008 |
|
RU2407430C2 |
| УСТРОЙСТВО ДЛЯ ТЕСТИРОВАНИЯ И ОТРАБОТКИ МИКРОХИРУРГИЧЕСКОЙ ТЕХНИКИ | 2018 |
|
RU2679297C1 |
| ИНДИКАТОР МАГНИТНОГО И ЭЛЕКТРИЧЕСКОГО ПОЛЕЙ | 2010 |
|
RU2444022C1 |
| СПОСОБ РЕГИСТРАЦИИ ДВИЖЕНИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257846C1 |
Изобретение относится к медицинской технике и к технике, используемой в исследованиях психофизиологии труда и в тренажерах для определения уровня тремора и отработки ручных рабочих операций. Устройство содержит датчик положения рук испытуемого или рабочего инструмента с источником электромагнитного поля, электромагнитную матрицу, координатную плоскость с нанесенной на ней графически заданной траекторией. Источник электромагнитного поля получает питание от высокочастотного генератора через усилитель, а наводимые в электромагнитной матрице напряжения обрабатываются и подаются в компьютер для регистрации и представления информации о результатах испытания. Устройство позволяет повысить точность определения уровня тремора и расширить состав исследуемых характеристик. 2 ил.
Устройство для определения положения объекта в пространстве, содержащее датчик положения рук испытуемого или рабочего инструмента и координатную плоскость с нанесенной на ней графически заданной траекторией движения, отличающееся тем, что датчик снабжен источником электромагнитного поля, выполненным с возможностью обеспечения его питания через первый усилитель от высокочастотного генератора, расположен над координатной плоскостью с электромагнитной матрицей, обмотки которой соединены с первым входом мультиплексора, второй вход мультиплексора соединен с первым выходом микроконтроллера, второй выход которого соединен с третьим входом быстродействующего выпрямителя, выход мультиплексора соединен со вторым усилителем, выход которого соединен с первым входом быстродействующего выпрямителя, а второй вход быстродействующего выпрямителя соединен с выходом фазорегулятора, вход которого соединен со вторым выходом высокочастотного генератора, выход быстродействующего выпрямителя соединен с микроконтроллером, третий выход которого соединен с компьютером.
| Устройство для исследования динамического тремора | 1988 |
|
SU1560098A1 |
| Роликовый подшипник для железнодорожных повозок | 1928 |
|
SU11607A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ КООРДИНАЦИИ ДВИЖЕНИЯ | 1989 |
|
RU2008801C1 |
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2146494C1 |
| ВОЛКОВ В.Г | |||
| и др | |||
| Методы и устройства для оценки функционального состояния и уровня работоспособности человека-оператора | |||
| - М.: Наука, 1993, с.208. | |||

