Настоящее изобретение относится к электронной технике, а более конкретно к широкоформатным устройствам ввода информации в ЭВМ (интерактивным доскам) для организации интерфейса пользователя при работе с различными системными и прикладными программами.
Известны устройства ввода информации [US Patent 3,819,857 June 25, 1974 и US Patent 4,734,546 March 29, 1988], содержащие электромагнитный указатель типа "перо", включающий в себя электромагнитную катушку, намотанную на магнитный сердечник, планшет, содержащий множество проводников, расположенных на противоположных сторонах диэлектрической подложки. Каждый из проводников выполнен в виде серпантина, расположенного вдоль одной координаты и смещенного относительно соседних проводников на постоянную величину. Серпантины по координатам X и Y расположены ортогонально на двух сторонах изолирующей подложки, образуя координатную матрицу, с рабочим полем, которое определяется как прямоугольная область, заключенная между крайними проводниками по осям X и Y, в которой дигитайзер способен обеспечивать регистрацию наведенных от электромагнитного указателя сигналов, для последующего определения его положения с заданной точностью. Взаимное расположение проводников координатной матрицы выполнено таким образом, что положение катушки указателя на плоскости в области, расположенной между двумя соседними проводниками, однозначно может быть определено путем анализа фаз сигналов, наведенных в проводниках. Фазы сигналов для каждого из серпантинов формируются в уникальные рефлексные двоичные коды (коды Грея), которые затем преобразуются в нормальный двоичный код, соответствующий положению указателя в определенной части рабочей области планшета.
Устройство [US Patent 4,734,546 March 29, 1988] отличается от устройства [US Patent 3,819,857 June 25, 1974] более высоким разрешением за счет применения алгоритма интерполяции для точного определения положения указателя между соседними проводниками, в то время как в устройстве [US Patent 3,819,857 June 25, 1974] при расстоянии между соседними проводниками 0,5 мм и расстоянии между соседними витками одного серпантина 256 мм максимальная разрядность входных данных, определяющих положение указателя, составляет 256/0,5=512=29, т.е. 9 бит.
В устройстве [US Patent 4,734,546 March 29, 1988] используется усилитель сигналов, индуцированных электромагнитной катушкой указателя в проводниках серпантинных структур, расположенных вдоль каждой из координат X и Y. Для этого проводники, расположенные вдоль каждой из координат, подсоединены к входам мультиплексоров каналов X и Y. Выход каждого мультиплексора подсоединен ко входу усилителя сигнала. Схема, управляющая мультиплексором, включает в себя микроконтроллер, который последовательно подключает проводники ко входу усилителя. Усиленный сигнал поступает на входы фазового детектора и выпрямителя. Выпрямленный сигнал поступает на вход преобразователя напряжения в частоту. Сигнал с результирующей частотой, в свою очередь, подается в виде импульсов на один из входов микроконтроллера. Микроконтроллер на основании зависимости частота-напряжение определяет амплитуду сигнала. Четырехразрядные коды Грея по каждой из координат однозначно определяют зону в пределах рабочей области планшета, в которой находится указатель. Затем на основании анализа амплитуд и фаз наведенных сигналов определяются два проводника, между которыми расположен указатель. Таким образом, координаты указателя могут считаться грубо определенными. Например, координата X на данном этапе определяется как:

где Xгруб. - координата X в первом приближении [мм];
D - расстояние между соседними проводниками [мм];
S - номер секции;
N - наименьший адрес одного из двух проводников, между которыми определено положение указателя.
Более точно координата определяется как:

где ΔX - интерполированное значение расстояния, на котором находится указатель от одного из двух проводников с наименьшим адресом, между которыми находится указатель. Метод интерполяции в данном случае не принципиален.
Координатная матрица, представляющая собой наборы проводников, смещенных друг относительно друга на постоянную величину и расположенных в виде серпантина вдоль каждой из координат, обычно изготавливается по технологии гибких двухсторонних печатных плат на полиимидной или лавсановой безусадочной основе.
В настоящее время в образовательной сфере широко применяются так называемые интерактивные классные доски, которые по сути являются устройствами ввода информации в ЭВМ, аналогичными вышеописанным, только большего размера. Создание классных досок больших размеров (например, 1,5×2 м) открывает новые перспективы для улучшения качества процесса обучения. Современные технологии позволяют создавать координатные матрицы больших размеров по технологии гибких печатных плат на полиимидной основе, однако стоимость изготовления координатной матрицы экспоненциально зависит от ее размеров, и для интерактивных досок стоимость координатной матрицы может превышать 90% стоимости конечного изделия.
Отечественные производители гибких печатных плат могут без разработки и изготовления дополнительного технологического оборудования изготавливать гибкие печатные платы размерами всего лишь до 900×1100 мм. Задача же увеличения размеров интерактивных досок является актуальной.
Целью изобретения является увеличение размеров рабочего поля планшета до или сверх пределов, ограничиваемых возможностями технологии изготовления координатной матрицы, сопровождающееся удешевлением широкоформатного устройства ввода информации в ЭВМ. Например, при размерах рабочего поля, в два раза превышающих технологически достижимые на данный момент для гибких печатных плат 900×1100 мм, возможно получение рабочего поля устройства ввода информации в ЭВМ 1600×2000 мм.
На фиг 1. показана типичная топология и конфигурация координатной матрицы 1, применяемой в известных технических решениях, изготовленной по технологии изготовления гибких печатных плат на лавсановой основе. Толщина такой печатной платы составляет порядка 0.2 мм, что позволяет изгибать ее в произвольном направлении на угол 180° с минимальным радиусом. Обычно радиус гибки листового материала равен толщине материала. Расположенные серпантином проводники вдоль оси Х 2 и оси Y 3 в габаритной конфигурации 1 образуют координатную матрицу, все проводники которой, расположенные вдоль осей Х и Y, подведены к ламельным разъемам 4 и 5. Габаритные размеры в данном случае не имеют значения, т.к. базовая топология не меняется, а линейные размеры рабочего поля результирующей координатной матрицы в два раза превышают линейные размеры рабочего поля исходной координатной матрицы.
Суть предлагаемого нового технического решения поясняется на фиг.2-4.
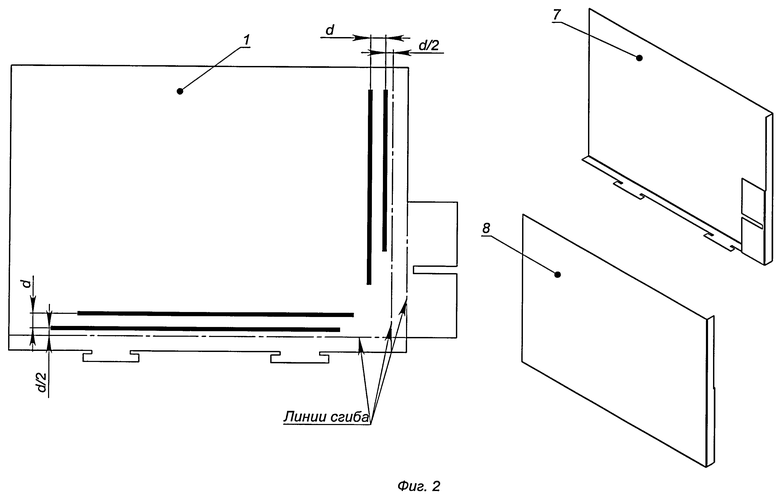
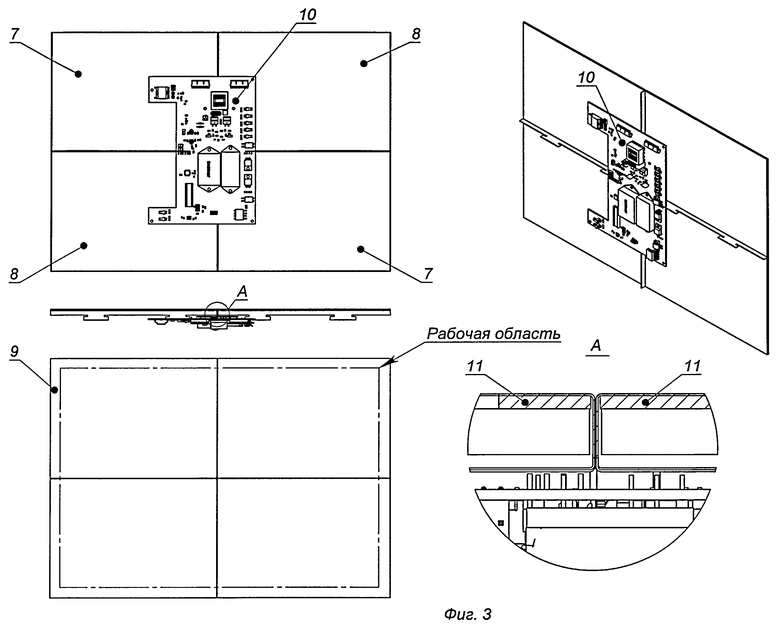
Путем сгибания координатной матрицы 1 по линиям сгиба на 180°, как показано на фиг.2, в зависимости от направления сгиба, получаются заготовки 7 и 8. Следует отметить, что линии сгиба отстоят от крайних проводников в направлениях Х и Y на половину шага проводников d. Путем соединения двух заготовок 7 и двух заготовок 8 в результате сгиба и объединения заготовок, как показано на фиг.2, все разъемы исходных заготовок находятся в непосредственной близости друг от друга и подсоединяются к устройству управления логикой работы и обработки данных 10. Для устранения паразитных электромагнитных наводок в областях сгиба, непосредственно соприкасающихся друг с другом, внутрь каждой из заготовок 7, 8 вставлен экран из листового метала 11, например алюминия.
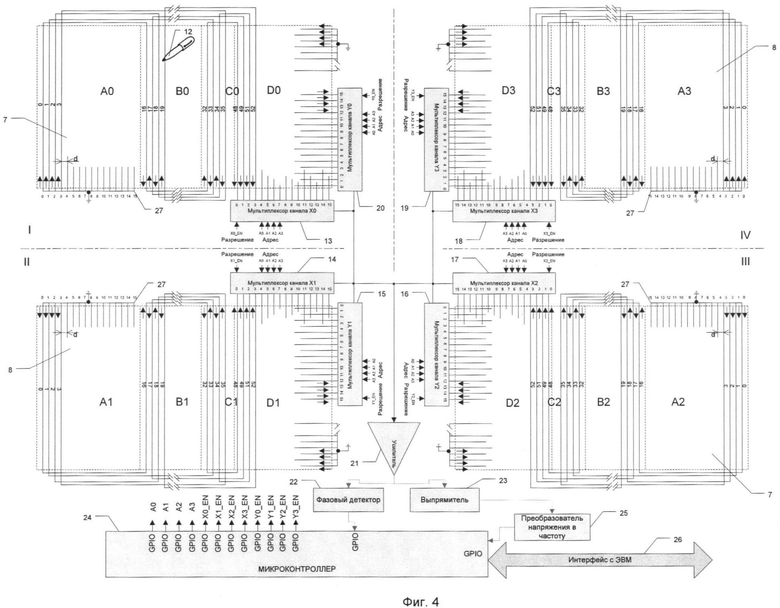
Принцип функционирования предлагаемого устройства поясняется на фиг.4, на которой представлена упрощенная блок-схема широкоформатного устройства ввода информации в ЭВМ (интерактивная доска), состоящая из 4 заготовок. Устройство ввода, состоящее из двух заготовок, функционирует аналогично описываемому. В состав устройства управления логикой работы и обработки данных 10 входят восемь мультиплексоров 13-20, усилитель сигналов 21, фазовый детектор 22, выпрямитель 23, преобразователь напряжение-частота 25, микроконтроллер 24 и интерфейс с ЭВМ 26. Указатель типа "перо" 12 имеет встроенную автономную схему управления, которая возбуждает катушку синусоидальным напряжением с частотой 245 кГц. Планшет представляет собой четыре идентичных заготовки 7 и 8, согнутых, как показано на фиг.2, и взаимно расположенных, как показано на фиг.3, представляющих квадранты рабочего поля, в которых наборы проводников расположены в виде серпантинов вдоль осей X и Y, по 16 проводников вдоль каждой из осей. Взаимное расположение серпантинных проводников выбрано так, чтобы расстояние между соседними проводниками было постоянным (d), а фазы сигналов, наводимых от указателей, чередовались, как показано стрелками. Таким образом, положение любого из указателей в областях An, Bn, Cn и Dn (0≤n≤3) каждого квадранта однозначно определяется путем анализа фаз сигналов при сканировании первых четырех проводников квадранта. Т.к. алгоритм определения координат одинаков для обеих осей, для большей наглядности блок-схемы проводники по оси Y показаны условно.
Каждый из 16-и серпантинных проводников одного квадранта, расположенных вдоль оси X, подсоединен одним концом к одному из входов 16-канального мультиплексора 13, 14, 17 или 18, а другие их концы объединены в общую точку 27.
Каждый из 16-и серпантинных проводников одного квадранта, расположенных вдоль оси Y, подсоединен одним концом к одному из входов 16-канального мультиплексора 15, 16, 19 или 20, а другие их концы объединены в общую точку 27.
Выходы каждого из мультиплексоров 13, 14, 15, 16, 17, 18, 19, 20 подсоединены ко входу усилителя 21.
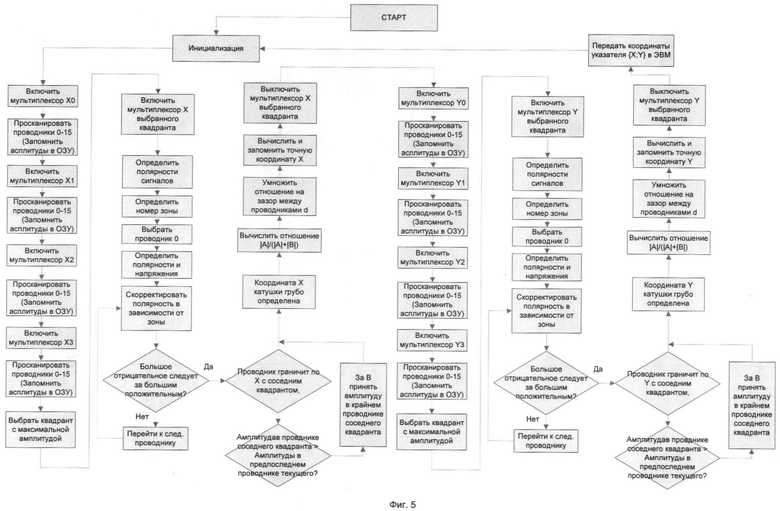
Микроконтроллер 24 осуществляет управление мультиплексорами, получает информацию от фазового детектора, регистрирует значения амплитуд сигналов, производит необходимые вычисления и передает информацию, содержащую абсолютные координаты указателей в ЭВМ. Определение абсолютных координат осуществляется в соответствии с алгоритмом, блок-схема которого представлена на фиг.5.
Определение координат указателей происходит с определенной периодичностью, определяемой требованиями к быстродействию устройства и производительностью микроконтроллера. В начале цикла определения координат происходит инициализация накопленных ранее данных. Затем микроконтроллер с помощью мультиплексоров 13, 14, 17, 18 по очереди подключает ко входу усилителя все проводники с 0 по 15 каждого квадранта, расположенные вдоль оси X.
Для каждого проводника наведенный в нем сигнал поступает на вход усилителя 21, а с выхода усилителя - на входы фазового детектора 22 и выпрямителя 23. С выхода фазового детектора значение фазы поступает на один из входов общего назначения (GPIO) микроконтроллера 24. С выхода выпрямителя выпрямленный сигнал с определенной амплитудой поступает на вход преобразователя напряжения в частоту 25. Полученная частота, пропорциональная амплитуде сигнала, поступает в виде прямоугольных импульсов на один из входов общего назначения микроконтроллера, в котором измеренному значению частоты ставится в соответствие цифровое значение амплитуды аналогового сигнала. Абсолютное максимальное значение амплитуды из всех 64 зарегистрированных микроконтроллером, принадлежащее одному из квадрантов, однозначно определяет нахождение указателя в данном квадранте.
Далее на основании информации о фазах для первых 4 выбранных проводников определяется четверть рабочей области квадранта (An, Bn, Cn или Dn), в которой находится указатель. Например, если указатель находится в четверти A, 4-битный код Грея, соответствующий этой четверти, будет 1100, для четверти B - 0110, для четверти C 1001 и для четверти D 0011 соответственно. Затем микроконтроллер определяет номера двух проводников из 16-и с максимальными значениями амплитуды наведенного сигнала и противоположными фазами. Грубо на данном этапе координата X указателя определяется по формуле:

где Xгруб. - координата X в первом приближении [мм];
D - расстояние между соседними проводниками [мм];
S - номер секции;
N - наименьший адрес одного из двух проводников, между которыми определено положение указателя;
М=1 для квадрантов 0,1;
М=2 для квадрантов 2,3.
Затем точное положение указателя определяется путем вычисления ΔX. Для этого микроконтроллер вычисляет коэффициент R по формуле:

где A - амплитуда сигнала, наведенного в проводнике, расположенном слева от указателя;
B - амплитуда сигнала, наведенного в проводнике, расположенном справа от указателя.
Значения берутся по модулю, т.к. имеют противоположные знаки. Затем вычисляется ΔX=D*R и по формуле (2) координата X. Координата X временно запоминается в ОЗУ микроконтроллера и по точно такому же алгоритму вычисляется координата Y указателя.
В случае если указатель находится на стыке двух квадрантов, то его принадлежность к одному из них определяется по тому, в каком квадранте зафиксирована максимальная амплитуда наведенного сигнала. Далее, если на основании анализа фаз определяется, что указатель находится между двумя последними проводниками, прилегающими к линии стыка двух квадрантов с одной стороны, то анализируются амплитуды сигналов, наведенных в двух проводниках соседнего квадранта, находящихся в непосредственной близости к линии стыка с другой стороны. Если амплитуды сигналов попарно равны, то считается, что указатель находится как раз на линии стыка двух квадрантов, т.е. точно посередине между крайними проводниками соседних квадрантов. Если нет, то точное положение указателя в области стыка двух квадрантов вычисляется методом интерполяции аналогично тому, как если бы указатель находился между двумя произвольными проводниками внутри квадранта.
Координата Y указателя вычисляется аналогичным образом. Затем координаты указателя {X; Y} передаются в ЭВМ, и процесс определения координат указателя начинается с начала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ЭВМ (ДИГИТАЙЗЕР) | 2009 |
|
RU2413969C1 |
| Устройство для считывания графической информации | 1982 |
|
SU1080163A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1992 |
|
RU2042207C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ОГРАНИЧЕННОМ ПРОСТРАНСТВЕ | 2007 |
|
RU2368309C2 |
| Устройство для вывода графической информации | 1988 |
|
SU1667122A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1434461A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1564661A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 1993 |
|
RU2067775C1 |
| Устройство для считывания графической информации | 1987 |
|
SU1550550A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1013989A1 |
Изобретение относится к широкоформатным устройствам ввода информации в ЭВМ типа интерактивных досок для организации интерфейса пользователя при работе с различными системными и прикладными программами. Техническим результатом является увеличение размеров рабочего поля планшета до или сверх пределов, ограничиваемых возможностями технологии изготовления координатной матрицы. Широкоформатное устройство ввода информации в ЭВМ (интерактивная доска) состоит из широкоформатного планшета, состоящего из двух (четырех) идентичных координатных матриц, содержит радиоэлектронный блок, включающий в себя четыре (восемь) мультиплексоров, усилитель, фазовый детектор, выпрямитель, преобразователь напряжения в частоту, а также микроконтроллер, реализующий по запрограммированному алгоритму способ точного определения абсолютных координат указателя в пределах рабочей области планшета. 1 з.п. ф-лы, 5 ил.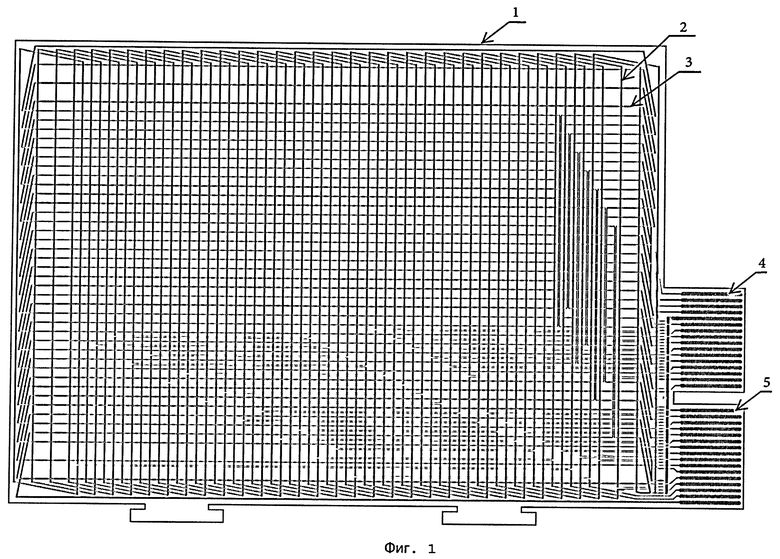
1. Широкоформатное устройство для ввода информации в ЭВМ (интерактивная доска), состоящее из планшета, включающего координатную матрицу с двумя группами проводников, выполненных в виде серпантинов на двух сторонах изолирующей подложки, причем проводники одной группы смещены относительно друг друга на одинаковое расстояние и перпендикулярны проводникам другой группы, и указателя со встроенным генератором фиксированной частоты и электромагнитной катушкой, излучающей под действием указанного генератора электромагнитное поле, наводящее в проводниках планшета электрический сигнал указанной фиксированной частоты, радиоэлектронного блока обработки наведенных в проводниках сигналов, состоящего из двух мультиплексоров по одному для каждой из групп проводников, усилителя напряжения, фазового детектора, выпрямителя, преобразователя напряжения в частоту и микроконтроллера, причем указанные группы проводников подключены одним концом к входам своего мультиплексора, а другие концы объединены, выходы мультиплексоров присоединены к входу усилителя напряжения, выход которого, в свою очередь, подсоединен к входам фазового детектора и выпрямителя, а выход выпрямителя подсоединен к входу преобразователя напряжения в частоту, выход которого, в свою очередь, подсоединен к микроконтроллеру, который по запрограммированному алгоритму последовательно подключает проводники из каждой группы к входам мультиплексоров и путем сравнения оцифрованных значений амплитуд и фаз сигналов, приходящих от проводников, определяет положение указанного указателя относительно планшета, отличающееся тем, что планшет включает две расположенные в одной плоскости одинаковые координатные матрицы, в каждой из которых один край загнут на 180° таким образом, что линия сгиба по оси Х (или Y) отстоит от крайнего по данной координате проводника на расстояние, равное половине шага проводников по данной координате, причем матрицы расположены вплотную отогнутыми краями друг к другу таким образом, что формируют единую рабочую поверхность планшета, разделенную на две половины, два электромагнитных экрана из листового металла, прилегающие к обратной стороне каждой из двух координатных матриц для устранения паразитного взаимного электромагнитного влияния координатных матриц в местах их стыковки, и четыре мультиплексора для подключения к входу усилителя всех проводников матриц.
2. Устройство по п.1, отличающееся тем, что планшет включает четыре расположенные в одной плоскости одинаковые координатные матрицы, в каждой из которых два края загнуты на 180° таким образом, что линии сгиба по осям Х и Y отстоят от крайнего по данной координате проводника на расстояние, равное половине шага проводников по данной координате, причем матрицы в планшете расположены вплотную отогнутыми краями друг к другу таким образом, что формируют единую рабочую поверхность планшета, разделенную на четыре квадранта, четыре электромагнитных экрана из листового металла, прилегающие к обратной стороне каждой из четырех координатных матриц, и восемь мультиплексоров.
| ПРЕОБРАЗОВАТЕЛЬ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1999 |
|
RU2165102C1 |
| Способ определения положения по крайней мере одного считывающего элемента относительно системы координатных шин | 1976 |
|
SU1511754A1 |
| US 4734546 A, 29.03.1988 | |||
| US 3819857 А, 25.06.1974 | |||
| US 6011545 А, 04.01.2000 | |||
| Устройство для регенерации воздуных фильтров | 1975 |
|
SU568469A1 |

